Probablemente, la forma más fácil para que un profesional de TI resuelva el problema de monitoreo ambiental en la sala de servidores es usar controladores especializados con salida SNMP (por ejemplo, NetBotz o NetPing). Pero para aquellos que no tienen miedo a las dificultades y desean obtener una solución económica a nivel industrial (con producción en serie de equipos), existe una opción interesante con el protocolo Modbus.

A continuación, describiré un sistema de monitoreo basado en componentes de fabricación rusa: NVP Bolid, y "fusionaremos" los datos en Zabbix 4.0. NVP "Bolid" es ampliamente conocido en los círculos de equipos de automatización contra incendios y la solución considerada llevará esta "impronta". Sus dispositivos, por decirlo suavemente, no difieren en el diseño y la consideración de los casos, pero ... el precio compensa con creces todas estas deficiencias. Vale la pena señalar una muy buena documentación y un soporte técnico gratuito más o menos normal.
Protocolos e interfaces
Antes de pasar al hardware, veremos brevemente los protocolos e interfaces utilizados:
Modbus : un protocolo industrial basado en el principio de "Maestro" - "Esclavo". Solo puede haber un maestro en una red Modbus que sondee a los esclavos y "diga" qué hacer. Como medio de transmisión, puede usar la interfaz RS-485 (Modbus RTU) o Ethernet (Modbus TCP). Teóricamente, el número máximo de dispositivos es 247.
Orion : protocolo propietario de la empresa NVP "Bolid", construido sobre el principio de "Master" (Master) - "Slave" (Slave). Aparentemente, la interfaz RS-485 modificada se utiliza como medio de transmisión de datos, por lo que la longitud máxima de la línea puede alcanzar los 3 km (!). El número máximo de dispositivos es 127.
DLS (línea de comunicación de dos hilos): protocolo patentado de la empresa NVP "Bolid", basado en el principio de "Maestro" - "Esclavo" (Maestro). Utiliza un cable de par de cobre como medio de transmisión de datos (se recomienda un cable de par trenzado). El número máximo de dispositivos es 127 + 1. Topología: un bus (o anillo) con ramificaciones, la longitud máxima de la línea puede alcanzar 1,5 km (según el tipo de cable, la sección transversal de los conductores de cable y la cantidad de dispositivos conectados).
RS-485 : interfaz de capa física, utiliza "par trenzado" (un par de "2 hilos" o dos "4 hilos" para la transmisión de datos, el segundo es menos común). La longitud máxima de línea declarada es de 1,2 km. La topología es un autobús.
Como puede ver, se utilizan líneas de comunicación bastante "de largo alcance". En todos los protocolos, el direccionamiento del dispositivo se establece mediante "manejadores" (preconfiguración).
Sensores
El sistema implica la conexión de sensores de dirección "especiales" (patentados) (para decirlo más estrictamente "detectores", es decir, dispositivos con un sensor incorporado), pero también puede conectar no direcciones "ordinarias" utilizando expansores de direcciones (de 1 a 8 entradas). El uso de detectores direccionables ofrece dos ventajas: casi todos los dispositivos direccionables reciben energía a través de la línea de señal (es decir, no es necesario suministrar una línea de alimentación de 12V separada) y no es necesario colocar el expansor de direcciones en ningún lado. Los sensores están conectados al
DPS .
La gama de equipos "terminales" es bastante amplia, pero daré la que se puede necesitar para resolver nuestro problema:
- S2000-VT: sensor combinado de temperatura y humedad para uso en interiores (IP41). Tiene un certificado de instrumento de medición, el error es de solo 0.5 ° C y el precio de venta recomendado de solo 1200 rublos.
- S2000-SMK (y sus variaciones) - sensor de "puerta abierta" (detector de contacto magnético, interruptor de láminas). Precio de venta recomendado: 300 rublos.
- S2000-DZ - sensor de punto de inundación (hecho en conjunto con Realty, por lo que el caso es "sin formato"). Precio de venta recomendado: 800 rublos.
- 2000-1, 2000-2, 2000-8: los expansores de direcciones para 1, 2 y 8 conexiones se pueden usar como "receptores" de señales de tipo "contacto seco" (activar / desactivar) desde otro equipo (por ejemplo, desde un dispositivo de extinción de incendios o bombas de aire acondicionado);
- S2000-SP2 - bloque de relé (para 2 salidas), con el que puede controlar dispositivos (por ejemplo, una lámpara de alarma - un indicador luminoso). Precio de venta recomendado: 1200 rublos.
Para obtener una lista completa de equipos, consulte el
sitio web oficial del fabricante .
Controlador
La "línea" de controladores, si puedo decirlo, consta de tres modelos:
- S2000-KDL - modelo básico (la designación significa "Sistema 2000 - Controlador de una línea de comunicación de dos hilos");
- S2000-KDL-2I: aislamiento galvánico agregado para RS-485 y DPS;
- S2000-KDL-Modbus: se ha agregado un convertidor de protocolo Modbus S2000-PP al diseño S2000-KDL-2I.
La apariencia de los controladores. Es más óptimo usar S2000-KDL-Modbus, pero también es posible usar S2000-KDL / C2000-KDL-2I con el convertidor de protocolo S2000-PP instalado cerca, que tiene un diseño de carcasa montado en panel.
El controlador desempeña el papel de "Líder" en la línea
DLS (solo se puede conectar una línea DPS a un controlador), y en la línea RS-485 Orion ya actúa como "Esclavo" y no será posible recopilar datos de él "directamente". Para recopilar datos en la línea RS-485 Orion, se utiliza la llamada consola 2000 o 2000- (incluida la versión incorporada), que ya tiene interfaces de transferencia de datos estandarizadas.
Los siguientes controladores también pueden distinguir las siguientes características:
- se refieren a un tipo configurable, no programable (es decir, solo necesita configurar los parámetros y no desarrollar un programa);
- soporte en DPS de hasta 127 dispositivos direccionables (S2000-VT tiene dos direcciones), y muchos comisionados no recomiendan usar más de 100-110;
- doble entrada para fuente de alimentación DC 12-24V;
- diseño de carcasa no muy conveniente (todos los cables conectados no se pueden ocultar en la carcasa del dispositivo y debe quitarlos de la parte posterior del dispositivo).
Para la tolerancia a fallas del sistema, puede usar las siguientes medidas (que son opcionales):
- anillo de bucle: una interrupción de bucle en un lugar no afecta la presencia de señales de sensores direccionables;
- El uso de bloques aislantes de rama (BRIZ): le permite hacer ramas radiales, así como aislar el segmento de bucle, en el que hubo un cortocircuito "DPS +" y "DPS-".
IMPORTANTE: el nuevo firmware llega constantemente a los controladores que eliminan errores y agregan funcionalidad, y el firmware C2000-KDL y C2000-KDL-2I son incompatibles.
Conexión Modbus
Como se describió anteriormente, se puede usar un controlador C2000-Modbus o un convertidor C2000-PP. Ambos esquemas prevén la emisión de señales utilizando el protocolo Modbus RTU de 2 hilos utilizando RS-485 como dispositivo esclavo (nuestro host es Zabbix o algún sistema SCADA). Se pueden usar dos métodos para conectarse al servidor:
- Preferido: convertidor Modbus RTU / Modbus TCP con conexión a la misma red local donde se encuentra nuestro servidor con software;
- Barato: convertidor RS-485 / USB con conexión directa al servidor. Noto que hay muchas quejas sobre la confiabilidad de estas memorias USB (puede tomar casi cualquiera, pedí a China por 100 rublos, usé un montón de convertidor RS-232 / RS-485 y un adaptador USB / RS-232 y ¡todo continuó funcionando!).
Son posibles dos esquemas para transmitir eventos al protocolo Modbus:
- directamente desde 2000- / C2000--Modbus, cuando estos dispositivos funcionan en el modo "Orion-Master" (seleccionado por un puente en el tablero) y actúan como el interrogador del sistema "Orion";
- utilizando el control remoto S2000M cuando recopila información de los controladores y solo luego la transfiere a Modbus a través de S2000-PP / C2000-KDL-Modbus (modo Orion-Slave). Este esquema es bueno porque el control remoto puede usarse como un "terminal local" (ver eventos en la pantalla LCD incorporada), y también continuar registrando eventos en caso de una falla del servidor con el software de monitoreo. Menos: la configuración es un poco más complicada y el control remoto tiene una apariencia muy específica.
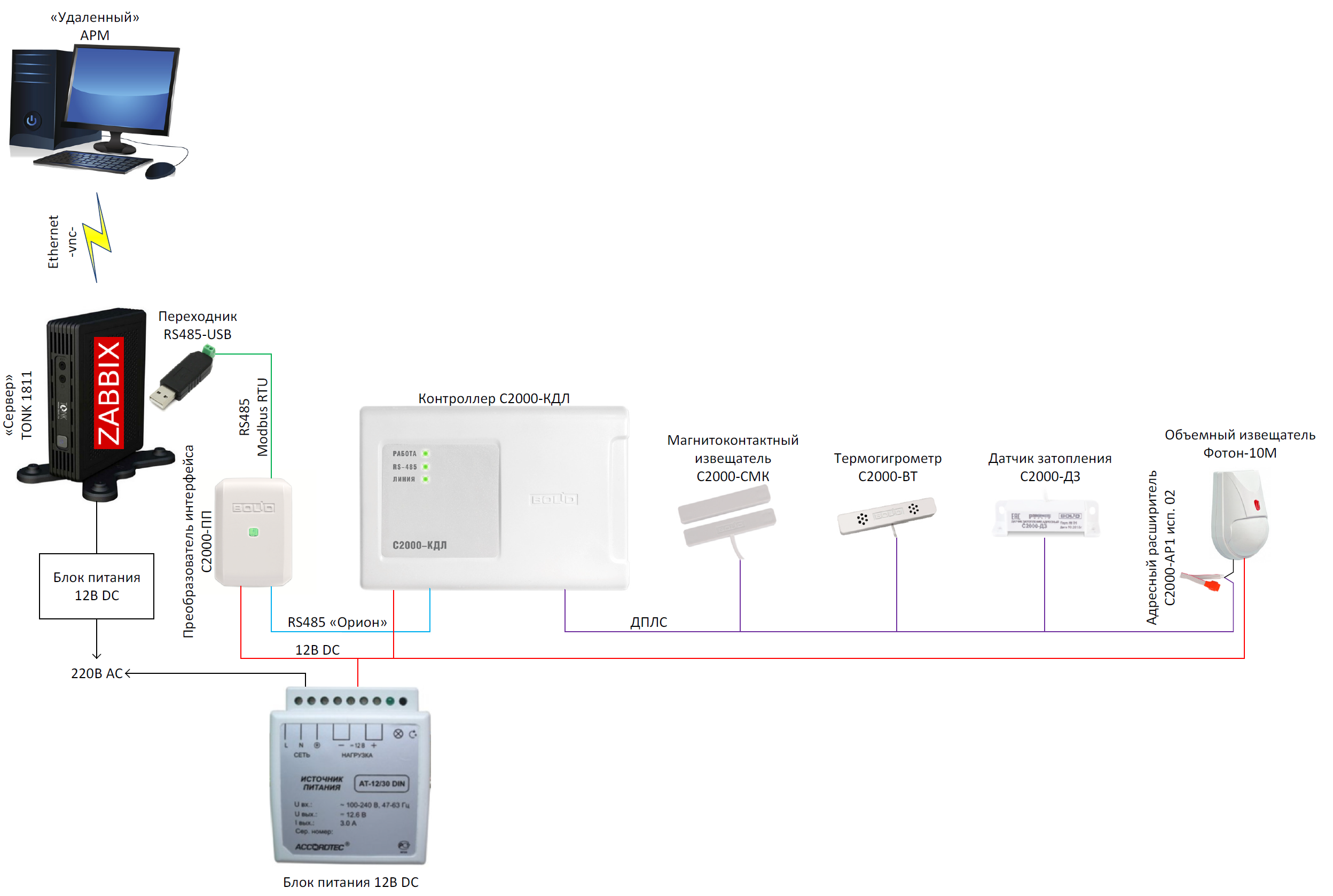
Ejemplos de circuitos del sistema Potencia e instalación
Para la fuente de alimentación, se requiere una fuente de alimentación de 12 V CC, preferiblemente estabilizada y montada en un riel DIN. Su potencia (generalmente indicada en mA o A) puede seleccionarse aproximadamente del cálculo de 1 controlador - 500 mA. Recomendaría usar una fuente de alimentación redundante (con batería incorporada, RIP) solo si se usa el control remoto S2000M. Y asegúrese de conectar la fuente de alimentación a la misma fuente de alimentación ininterrumpida (UPS) que el servidor del sistema de monitoreo.
Por supuesto, puede montar todo esto en la pared, pero dejarlo para los instaladores de alarmas contra incendios y de seguridad, y utilizaremos un riel DIN de 3U para la instalación en un gabinete de 19 "(por ejemplo, el PSM-3U o Cabeus CMO con el mismo artículo, tendrá que tirar el panel frontal) En el caso de usar el control remoto S2000-M, puede usar un enchufe de 19 "4U (preferiblemente perforado), que actuará como un panel de montaje y al cual un riel DIN para los terminales y el controlador ya está fijo. Menos la decisión: el equipo representa el montaje del avión de 19 ".
Para ensamblar y montar un sistema de componentes no debería causar preguntas, pero llamo la atención sobre lo siguiente:
- La mayoría de los sensores tienen una pequeña pieza de cable que sobresale. Para aumentar el cable, puede usar soldadura con termocontraíble, o una caja oscilante de dos pares KS-2 (compacta, pero la mano de obra es "poco convincente"), o la conexión RJ11 (RJ45);
- Antes de montar en los sensores, sus direcciones deben registrarse (como se describe a continuación) y marcarse;
- al conectar sensores, es necesario observar la polaridad de "DLS +" y "DLS-" (consulte la documentación, de qué color tiene DLS +, generalmente de color), si lo mezcla, el sensor no se detectará en el sistema.
Para aquellos que no quieren soldar, pero les gusta exprimir los "chips", puede usar la opción que se describe a continuación (probablemente, todavía es mejor que RJ11, para no conectar accidentalmente la línea DPS al servidor).
Será requerido:
- cable de par trenzado 2 pares, sin blindaje;
- "Bolsa" de conectores RJ11 (6P4C o 6P6C);
- Divisores RJ11 con entradas tipo zócalo (hay una gran variedad de opciones a precios muy razonables).
En un par comenzamos DPS, en el otro, por ejemplo, 12V DC. Conexión de sensores a través de divisores.
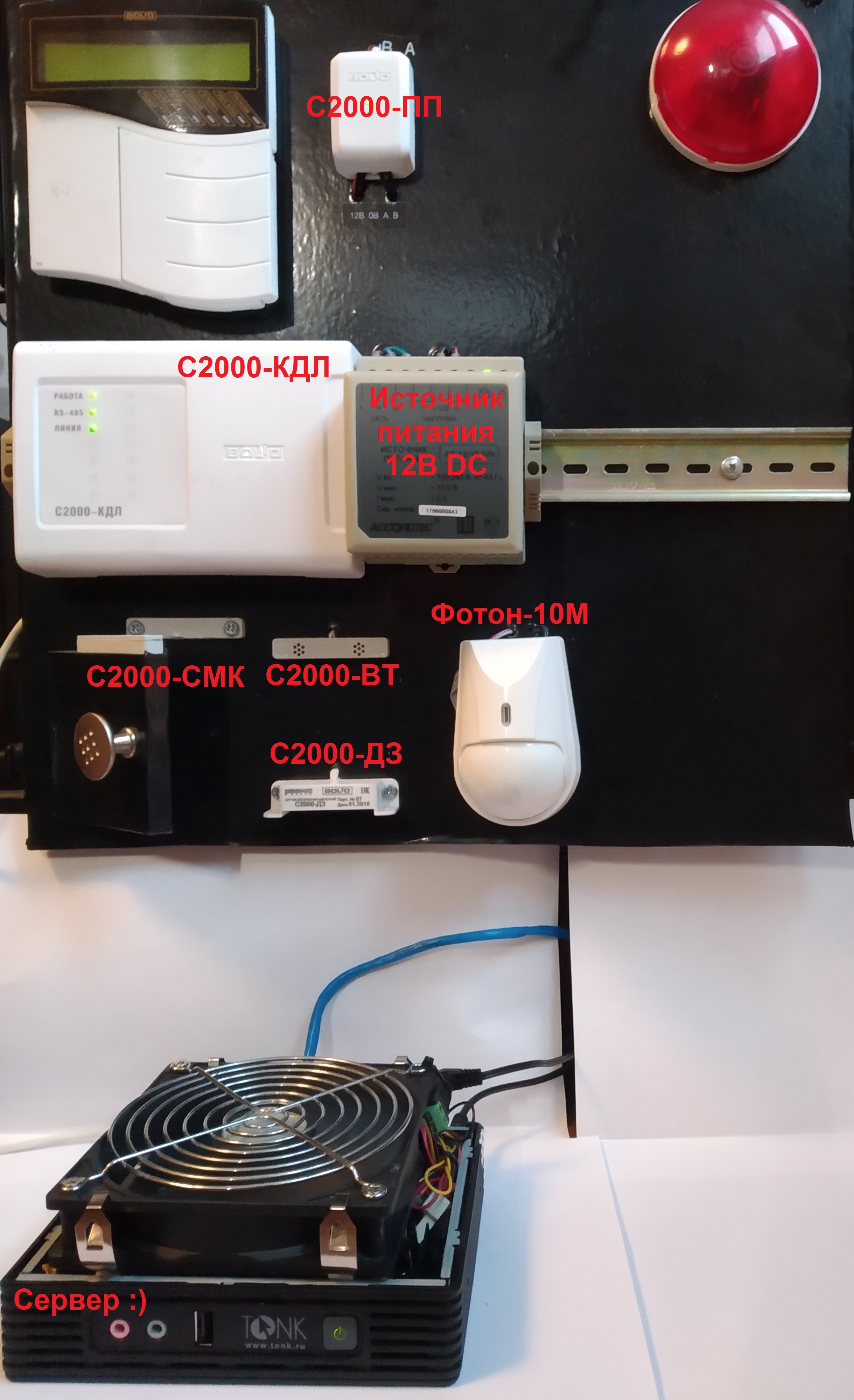
Soporte de montaje
Para la parte "práctica", se montó un stand compuesto por:
- convertidor de protocolo C2000-PP fabricado por NVP Bolid;
- controlador S2000-KDL producido por NVP "Bolid";
- termohigrómetro (sensor combinado de temperatura y humedad) C2000-VT fabricado por NVP Bolid;
- detector de contacto magnético S2000-SMK fabricado por NVP "Bolid";
- sensor de fuga de puntos S2000-DZ fabricado por Rielta;
- extensor de dirección S2000-AP1 isp. 02 producción de NVP "Bolid";
- detector volumétrico Photon-10M fabricado por "Rielta" (tal "colmado");
- Unidad de fuente de alimentación 12V-AT / 12 / 1.5 DIN fabricada por AccordTec;
- Adaptador RS-485 / USB comprado en aliexpress (en el chip CH340G común, Linux lo define como "adaptador serie USB HL-340 de QinHeng Electronics"). Se volvió interesante cómo funcionará el sistema en la configuración más barata;
- Cliente ligero TONK 1811 del grupo de empresas TONK (fue comprado en avito por 500 rublos) en un procesador Intel Atom N270 con gráficos integrados GMA950.
Refinando el Thin Client y la apariencia del standEl Thin Client estaba un poco "terminado":
- Un módulo DOM de 2GB con Windows XP incorporado instalado ha sido reemplazado por discos duros 2.5 ATA de 60GB de una computadora portátil vieja (tuve que comprar un cable, por alguna razón, el SATA-HDD no se recogió; incluía el puerto SATA en el BIOS);
- aumentó la RAM DDR2 SO-DIMM de 1GB a 2GB;
- Linux Mint 19.1 “Tessa” Xfce Edition instalado y escritorio remoto configurado con TightVNC;
- El sistema de enfriamiento fue "refinado": redujo el disipador de calor para que el HDD quedara casi "al ras" con la carcasa, quitó la cubierta superior y en la parte superior "agregó" un ventilador de 120 mm conectado a través de una resistencia. Inmediatamente todos los "frenos" desaparecieron, se volvió bastante razonable trabajar.
Configurar equipo Bolid
Todos los ajustes se realizan en el entorno de Windows, por lo que antes de comenzar a trabajar, debe instalar el controlador en el adaptador RS-485 / USB, así como dos programas "super" del NVP "Bolid", que se entregan de forma gratuita:
Orion-prog y
Uprog . Además, los dispositivos se conectan por separado al adaptador RS-485 / USB a los puertos Orion AB RS-485 (se usa diseño directo, y no como en los puertos COM).
IMPORTANTE: con todos los pasos posteriores en el S2000-PP, se debe quitar el puente XP1 de la placa.
Paso 1. Inserte el adaptador RS-485 / USB en el conector USB y busque en el administrador de dispositivos qué número de puerto COM está asignado al adaptador. Los controladores para el adaptador deben instalarse sin signos de exclamación en el "Administrador de dispositivos".
Paso 2. En nombre del administrador, ejecute Orion-prog, seleccione el puerto COM deseado y realice una búsqueda y vea la versión de firmware del dispositivo. Vaya al sitio web oficial del fabricante y verifique si hay firmware más reciente y, si es necesario (lo más probable, será necesario), realice una actualización (en el momento de la redacción: 1.32 para C2000-PP, 2.22 para C2000-KDL).
Firmware del instrumento en imágenes * Firmware 1.32, de hecho, estaba instalado "torcidamente" - en Uprog, la configuración no fue leída desde el dispositivo. Por lo tanto, "retrocedió" a 1.31.
Paso 3. Configuración de la dirección para dispositivos (primero con S2000-PP, por ejemplo, 2 y luego con S2000-KDL - 3). Para hacer esto, ejecute Uprog: todos los dispositivos tienen una dirección predeterminada de 127, por lo que debe configurar los dispositivos al principio uno a la vez. Para un video más detallado del fabricante, vea
YouTube .
Paso 4. Después de configurar la dirección en S2000-KDL, es necesario configurar las direcciones de los sensores en la línea de comunicación de dos hilos (DLS). También tienen la dirección predeterminada 127 (y el círculo con el sensor en Uprog no está resaltado). Leemos la configuración del dispositivo (Ctrl + F3) y conectamos secuencialmente los sensores a las salidas del DLS, configurando las direcciones. Al apuntar al sensor en el menú contextual “Solicitud de tipo AU”, puede especificar el tipo de sensor o “Solicitud de ADC AU”: averigüe si el sensor funciona (por ejemplo, para un detector de contacto magnético del ADC al cerrar: 100 y al abrir: 50). De hecho, tengo la siguiente configuración de dirección: 1 - Interruptor de láminas C2000-SMK, 2 - Temperatura C2000-VT, 3 - Humedad C2000-VT, 4 - Fuga C2000-DZ, 5 - ISP expansor de direcciones C2000-AP1. 02 (con el detector volumétrico Photon-10M conectado a él).
Direccionamiento de sensores en imágenes A continuación, vaya a la pestaña "Entradas" y haga lo siguiente:
- indique los tipos de sensores: para temperatura - 10, para medir humedad - 15, para todos los demás - 6 (tecnológico);
- para las entradas tecnológicas establecemos "Tiempo de recuperación, s": este es el tiempo después del cual el bucle volverá al estado "Normal" después de recibir el estado "Infracción". Es necesario indicar el número de al menos el intervalo de sondeo en Zabbix (tardé 10 segundos);
- apague "Control de la indicación AU" (0), "Supervisión de circuito abierto y cortocircuito" y "Supervisión del estado de la batería de respaldo" para simplificar la configuración.
Configuración de entradas para S2000-KDL en imágenes Después de todas las "manipulaciones" con S2000-KDL, llevamos a cabo el "Registro de configuración en el dispositivo".
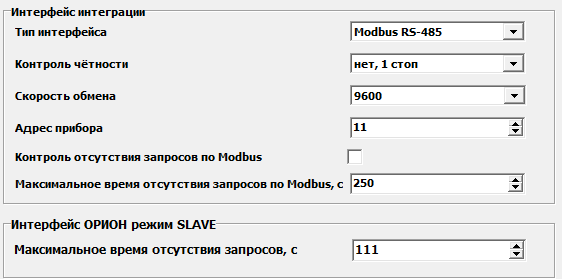
Paso 5. Configurar S2000-PP.
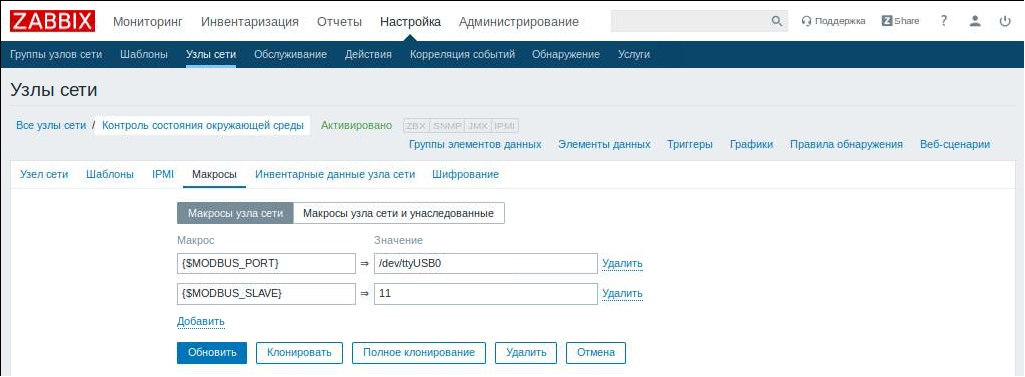
En la pestaña "Dispositivo", la configuración se muestra en la imagen (estos son los más "en ejecución" y se aplican de forma predeterminada para la mayoría de los dispositivos). El puerto COM del adaptador RS-485 / USB y cualquier otro dispositivo conectado a la red Modbus debe tener una configuración similar. Seleccioné la dirección 11 para el dispositivo S2000-PP en la red Modbus (¡la dirección en el sistema Orion es 2!).
Luego vamos a la pestaña "Dispositivos" y comenzamos a completar la "Tabla de zonas":
- la primera columna indiqué "3": esta es la dirección del dispositivo S2000-KDL en el sistema Orion;
- número de bucle de alarma ("bucle de alarma"): estas son las direcciones de los sensores (en realidad, el bucle de alarma = dirección, podemos omitir varias direcciones si no queremos obtener información de ellas);
- Sección Modbus No. - puede agrupar nuestros sensores en grupos. Para simplificar, no hice esto y atribuí a todos 1 sección;
- El tipo de zona es un parámetro muy importante. Lo seleccionamos según el tipo de sensor.

Después de configurar S2000-PP, llevamos a cabo el "Registro de configuración en el instrumento".
Paso 6. Combine C2000-PP y C2000-KDL en una red a través de RS-485 Orion, conecte los sensores a C2000-KDL (puede usar un montón de dos terminales) y conecte el adaptador RS-485 / USB a la salida Modbus C2000-PP. Configuramos el puente XP1 en la posición cerrada (importante: después de instalar el puente, debe reiniciar el dispositivo restableciendo el voltaje de suministro). Todo: el sistema está "listo para la batalla".
Verificamos "operabilidad" en el programa de consola gratuito
Modpoll Modbus Master Simulator (en adelante denominado "Modpoll"), por ejemplo, en la dirección de firmware "S2000-PP" o enviando información de S2000-KDL a "40000" - este es el primer sensor:

El firmware "para familiarización" se puede descargar
aquí .
Configuración de Zabbix
Advertencia: Zabbix se configuró por primera vez, como Linux Mint (ya que no hay Zabbix en Windows) :)Después de instalar Zabbix, debe instalar los paquetes
autoconf ,
automake ,
libtool ,
pkg-config y luego el módulo de extensión -
libzbxmodbus . Hay un artículo separado sobre él en
Habré (me referiré constantemente a él) y se ha actualizado recientemente, solo por trabajar con Zabbix 4.0. El artículo también tiene información más detallada sobre el protocolo Modbus. El módulo en sí y las instrucciones más o menos detalladas se encuentran en
GitHub .
Pequeñas diferencias en la instalación de la especificada en GitHub:
... ./configure --prefix=/etc/zabbix --enable-zabbix-3.2 ... sudo make install
Al estudiar el funcionamiento del módulo
libzbxmodbus , quedó claro que no sería posible aplicar el esquema con el control remoto S2000M, porque en este caso los datos de los termohigrómetros se ven así: escriba el número de la zona deseada en el registro 46179 y luego recopile los datos del registro 46328, es decir muy no trivial (en sistemas SCADA "grandes", esto se puede implementar, por ejemplo, en MasterSCADA).
En el archivo de configuración,
etc / zabbix / zabbix_server.conf, escribimos los enlaces de
extensión y conectamos el hardware al servidor con Zabbix. No tuve que instalar controladores para el adaptador RS-485 / USB, pero aún no entendí cómo averiguar qué número de USB usar, es bueno que la conexión a
/ dev / ttyUSB0 funcionó (puede ver que el dispositivo se encontró en el sistema usando el comando
lsusb ).
Al igual que con Windows, verificamos con la utilidad Modpoll (ejecuté Linux i386) que el hardware está conectado y que la información de ellos está disponible:

Dado que el artículo describe el proceso de configuración utilizando el ejemplo de Zabbix 2.2: la interfaz es un poco diferente allí, proporcionaré explicaciones e imágenes de la configuración.
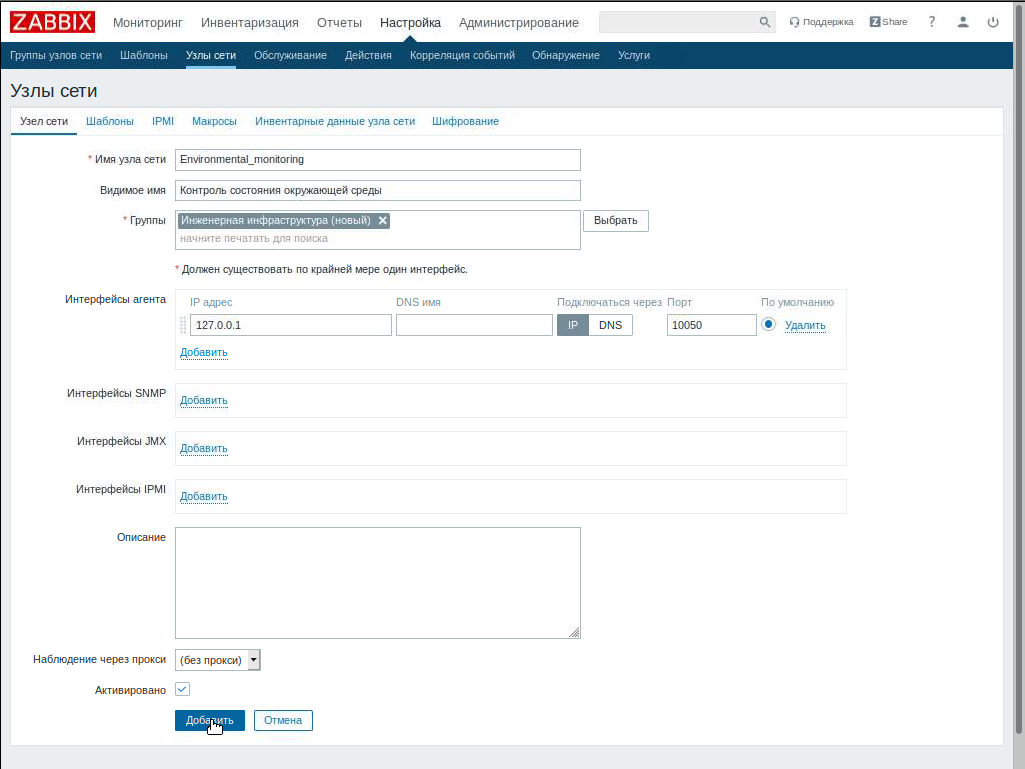
Paso 1. Creamos un nodo de red y un grupo en el que se incluirán nuestros nodos (por ejemplo, un nodo - "Monitoreo ambiental" y un grupo - "Infraestructura de ingeniería"):
Configuración> Hosts> Crear host> Ingrese nuestros nombres> Agregar
Paso 2. Crear los elementos de datos. El artículo recomienda crear plantillas, pero como nuestro sistema no contiene elementos duplicados, omitiré este paso. Por ejemplo, si tuviéramos varios aires acondicionados conectados a través de Modbus, podríamos usar la funcionalidad del sistema.
Configuración> Nodos de red> En la línea que contiene el nombre de nuestro nodo "Monitoreo ambiental", haga clic en "Elementos de datos"> en la ventana que aparece, haga clic en "Crear elemento de datos".
Comenzamos a "martillar" nuestros sensores:
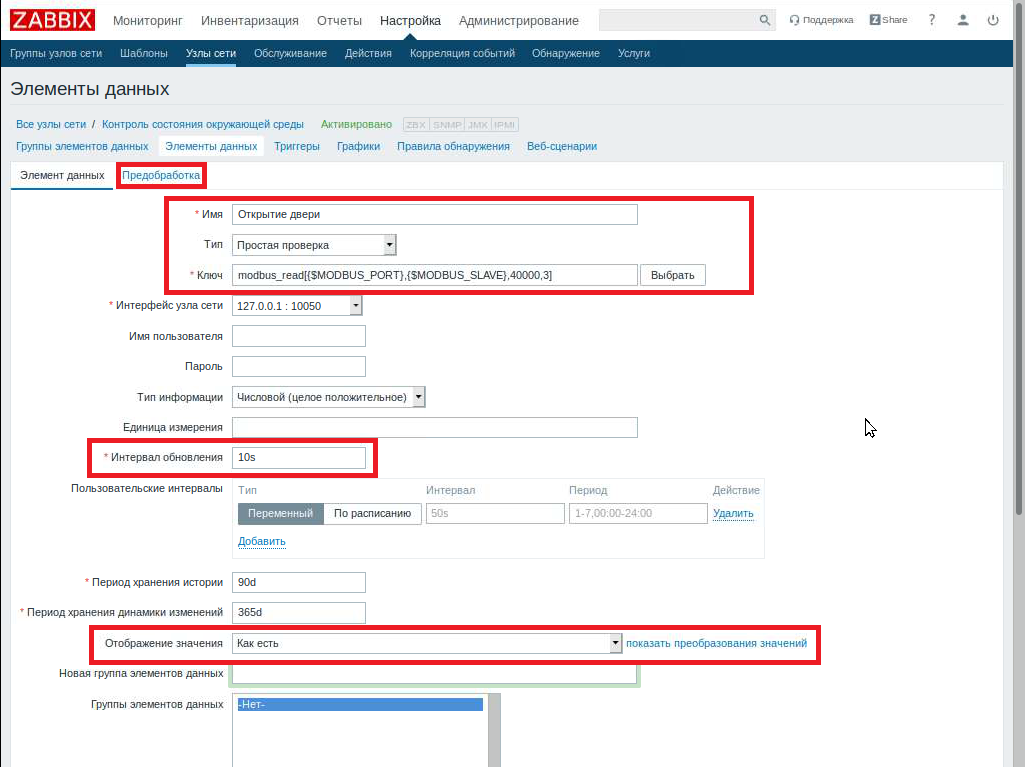
Matices menores:
- el artículo usa la sintaxis de la función "modbus_read_registers" , y de acuerdo con la descripción de GitHub "modbus_read" : la segunda opción es más corta y funciona;
- en lugar de las macros {$ MODBUS_PORT} y {$ MODBUS_SLAVE}, puede especificar el puerto en la forma / dev / ttyUSB0 y " 11 ", pero esto será inconveniente si luego necesita cambiar el puerto USB o la dirección del S2000-PP;
- la documentación indica que para solicitar el estado de la zona (columna "Modbus zone No.") en S2000-PP, debe contactar: "dirección de registro 40000 + M, donde M = (zona No. –1)" - este es el progreso: "zone No. menos 1 "
- no realice una encuesta de tiempo muy frecuente: S2000-PP comienza a devolver un error de "error de excepción 15": el dispositivo no tiene tiempo para preparar los datos (esto se expresa en el brillo constante del indicador en el dispositivo);
- para datos de temperatura y humedad con registros 3000 -... se toma
- en la ventana "Elementos de datos" también está la pestaña "Preprocesamiento" deseada. Aquí puede editar lo que se mostrará "al final". La temperatura y la humedad se obtienen de los valores de lectura, que deben dividirse entre 256: "Factor de usuario" - 0.0039 (es decir, 1/256);
- Para interruptores de láminas discretos, sensores de fugas, etc. también debe usar la "Pantalla de valores", esto se debe a la forma en que se proporciona la información.
Configuración de conversión de datos en imágenes Un poco sobre cómo se proporcionan los datos al sondear zonas.
Suponga que recibió una respuesta en formato decimal 9148 (D). Lo traduciremos en formato hexadecimal (HEX): obtenga 23BC; de acuerdo con las instrucciones para el dispositivo S2000-PP, estos son dos eventos con los códigos 23 (HEX) / 35 (D) y BC (HEX) / 188 (D). A continuación, consulte la Tabla 5. “Lista de eventos (estados AL) del sistema Orion”. En él encontramos 35 "Restaurando la entrada tecnológica" y 188 "Restaurando la comunicación con la entrada". No es necesario traducir D-HEX-D, el primer evento es la parte entera de dividir el valor recibido por 256, y el resto es el segundo evento (
9148 =
35 * 256 +
188 ). Al entrevistar aportes tecnológicos, solo recogeremos el primer evento (prioridad), que "debería" tomar los estados 35 y 36 ("Restaurar el aporte tecnológico" y "Violación del aporte tecnológico"). Descartaremos la parte fraccional (segundo evento) utilizando la configuración del elemento de datos "Tipo de información: numérico (entero positivo)".
Paso 3. Complete las macros del puerto y los números de dispositivo:
Configuración> Nodos de red> "Monitoreo ambiental"> seleccione "Macros"
Paso 4. Visualización de lecturas en el panel de control:
Pantalla de inicio> Todos los paneles, seleccione "Crear panel"> en la ventana que aparece, establezca "Nombre del panel" y el usuario para el que estará disponible este panel> Haga clic en "Crear un nuevo widget"> Escriba "Información general de datos", Intervalo de actualización "10 segundos", Grupos nodos de la red de Infraestructura de ingeniería> Agregar> Ajustar tamaño del panel y haga clic en "Guardar cambios":

Conclusión
El sistema resultante, mediante el uso de protocolos de "largo alcance", puede ser una solución excelente, tanto para monitorear el servidor como para un par de zonas de oficinas cruzadas (en términos de monitoreo de las condiciones de temperatura y humedad) o incluso un pequeño centro de datos. Alguien puede decir "fu fu fu, el auto todavía es asqueroso, necesitas usar XXX (sustituir algo de la automatización industrial)" también es una opción, pero en mi opinión será muy redundante y también más costoso . Y un pequeño matiz: como puede ver, el sistema en el Bolid es bastante simple (aunque hay una lógica algo extraña), pero "termina" la decisión sobre el baile de graduación. controladores - a veces sigue siendo un "fanático".
PD: Este artículo es una adaptación de dos artículos en mi blog:
Monitoreo económico para la sala de servidores (parte 1 - introducción)Monitoreo económico para la sala de servidores (parte 2: práctica)UPD Después de trabajar durante 3 días, el adaptador RS485-USB se cayó. Se reconoce como inestable, pero adecuado para la puesta en marcha. Fue reemplazado por un convertidor de un solo puerto MGate MB3170 hecho por MOXA (tomado de lo que estaba disponible): todo se estabilizó.
Debe comprender que este artículo es solo un ejemplo de cómo "hacer amigos" con Zabbix y Bolid. Para una implementación real, puede agregar más estados DPS monitoreados, así como, por ejemplo, temperaturas negativas (se procesan de manera algo diferente).