Este dispositivo nació en el proceso de trabajar en un proyecto para una computadora de buceo, que en su composición debería haber tenido un telémetro de sonda de haz estrecho. O buscamos mal o, de hecho, no había nada adecuado para los parámetros disponibles en el mercado, pero al final, en lugar de adquirir un módulo listo para usar, decidimos inventar nuestro telémetro para una computadora de buceo. Además, el proceso de integración en una caja de computadora compacta parecía más fácil cuando el emisor y el circuito electrónico se separaron de acuerdo con el espacio libre dentro de la caja.
Mientras la computadora de buceo esperaba en las alas, se nos ocurrió la idea: ¿qué pasa si el telémetro está separado en un proyecto separado? Como tuvimos dificultades para encontrar el módulo adecuado para el telémetro submarino, probablemente alguien más tuvo dificultades de búsqueda similares.
Los requisitos iniciales para el módulo se identificaron de la siguiente manera:
- Interfaz digital simple. Idealmente, un UART con comandos de texto / respuestas.
- voltaje de alimentación - 5 voltios
- Carcasa impermeable lo más compacta posible
Para no retrasar la narrativa, inmediatamente doy el esquema de trabajo inicial con algunas explicaciones en el texto.
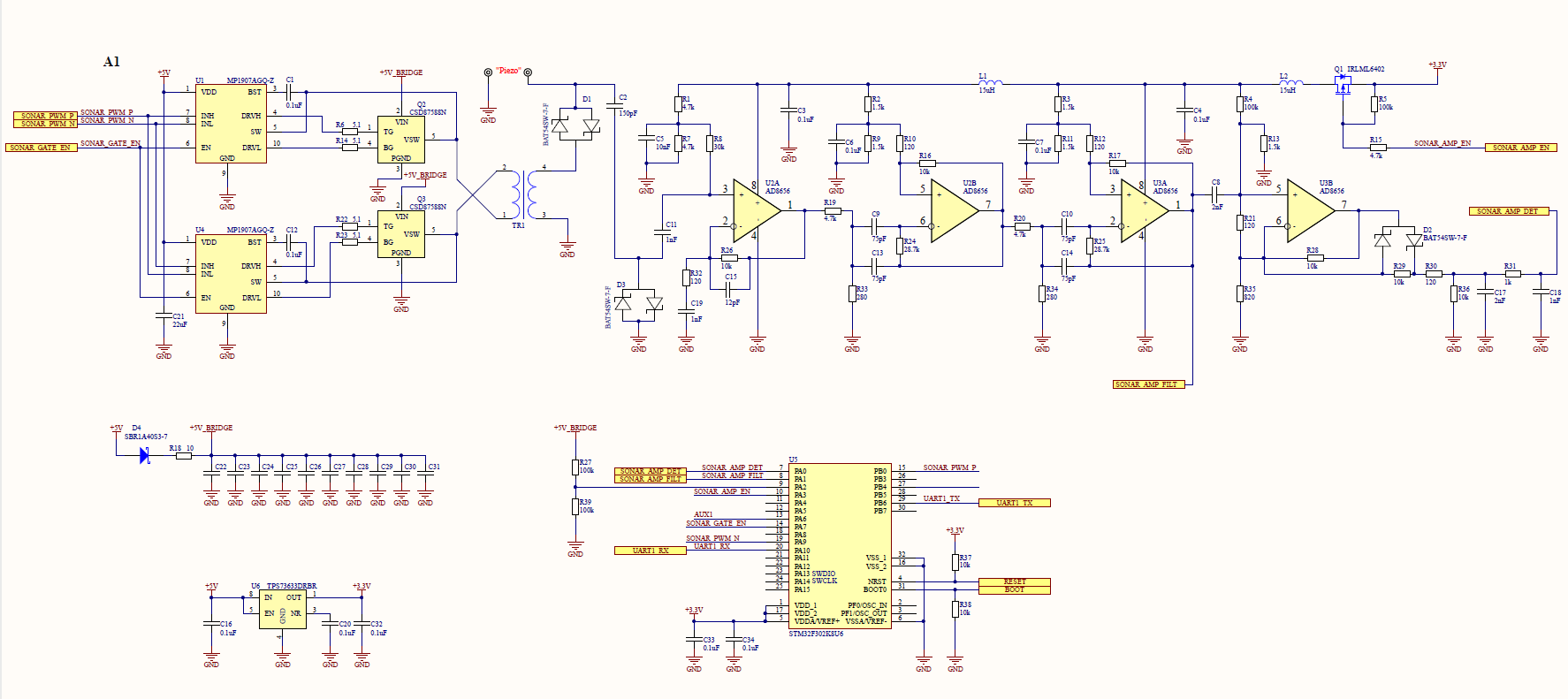
Como puede ver, el esquema es una versión clásica, dividida condicionalmente en tres bloques principales:
- Gerente
- Transmitiendo
- Anfitrión
El STM32F302K8U6 MK fue elegido como elemento de control, como una buena combinación de precio, rendimiento y dimensiones. El área de responsabilidad de esta unidad es generar una señal para la unidad de transmisión, digitalizar y procesar la señal desde la unidad receptora, y proporcionar a las aplicaciones del usuario acceso para configurar el sistema y los datos de medición en un formato conveniente para ellos.
La unidad de transmisión contiene: un controlador de compuerta, interruptores de potencia, transformador elevador correspondiente, ensamblaje de diodos antiparalelo. El último elemento, en general, no es necesario en tales esquemas, pero, en nuestro caso, juega un papel importante en la "desconexión" del transformador en la etapa de recepción, cuando el valor del voltaje efectivo en el elemento piezoeléctrico es menor que el voltaje de apertura de los diodos, lo que ayuda a aislar la etapa de entrada del amplificador de la señal recibida de transformador
La unidad receptora es la más exigente en cuanto a la calidad del rendimiento, de cuyo trabajo depende casi todo. Por un lado, debe digerir cientos de voltios en la entrada en la etapa de generación de pulsos de sondeo. Por otro lado, para proporcionar amplificación de señal con una amplitud del orden de microvoltios con una relación señal / ruido aceptable hasta el nivel de detección y captura confiable en el ADC. Dos componentes son responsables de la capacidad de permanecer seguros y sanos a cientos de voltios en la entrada: un condensador de alto voltaje C2, en el cual la corriente de CA es limitada, y un conjunto de diodo antiparalelo que limita el voltaje a valores aceptables. Vale la pena señalar que este circuito solo puede realizar su tarea en modo pulsado con una duración del orden de decenas de microsegundos.
Tres etapas de los filtros de paso de banda activos son responsables de la amplificación de la señal, de las cuales las dos últimas son filtros de banda estrecha de segundo orden que proporcionan una buena selectividad de frecuencia. Sin embargo, a costa de una buena selectividad de frecuencia, es un enfoque más riguroso para la selección de errores para componentes de ajuste de frecuencia, de lo contrario no garantizará la estabilidad de los parámetros de una instancia a otra. Dentro del presupuesto del dispositivo, los errores para nuestra tarea resultaron ser 0.1% para resistencias y 0.5% para condensadores. Además según el esquema: un detector de amplitud y un filtro pasivo de paso bajo, para suprimir el portador residual que pasa a través del detector.
En cuanto a la parte acústica del dispositivo, que no es visible en el diagrama del circuito, aquí el elemento básico es el disco piezoeléctrico DZHGK.757681.008-172, 12.9 mm de diámetro, 3.1 mm de espesor y una frecuencia de resonancia de 640 kHz. Este elemento es tanto el emisor del pulso de la sonda como el receptor de la señal reflejada. Del lado del medio ambiente acuático, está aislado por un elemento de cuarto de onda (resina de poliuretano). Junto con el circuito analógico, el diseño del emisor / receptor hace una gran contribución a la calidad del dispositivo en su conjunto. La velocidad del sonido en plástico, que se utiliza como un elemento coincidente / aislante en el emisor, es de 2400 m / s. Esto determinó que el grosor del elemento correspondiente es de 0.9 mm.

Hubo algunos defectos en el prototipo de la placa de circuito impreso, pero al montarlo hicimos que este dispositivo funcionara en el modo mínimo aceptable. Esto fue suficiente para eliminar las características del patrón de radiación.

Como banco para la medición de directividad, no pensamos en nada mejor que usar un recipiente de plástico lleno de agua, en el que nuestro módulo telémetro está instalado como un emisor, y a poca distancia de él, un receptor es un elemento piezoeléctrico conectado a un osciloscopio. El módulo del buscador de rango puede girar de izquierda a derecha de 0 a 180 °, en este momento tomamos un oscilograma del receptor y determinamos la amplitud de la señal recibida dependiendo del ángulo de rotación del emisor.


A continuación se muestra un gráfico del patrón de radiación final.

Se realizaron mediciones adicionales en una piscina improvisada: una tubería de plástico llena de agua a una altura de 1 metro. Por cierto, fue posible detectar tres reflejos desde el fondo y la superficie del agua antes de que la señal desapareciera por completo.
Como decidimos usar la interfaz UART con comandos de texto simples (en la primera etapa), no fue difícil implementar un paquete del módulo de buscador de rango con la GUI en una computadora que ejecuta Processing.
En la foto, un intento de escanear el fondo de un depósito local utilizando una embarcación con un módulo telémetro y un transmisor de radio instalado para recibir datos del módulo en una computadora portátil. Desafortunadamente, durante los momentos de prueba emocionante de una pieza de hierro, lo que menos piensa es la calidad de las fotos del proceso.


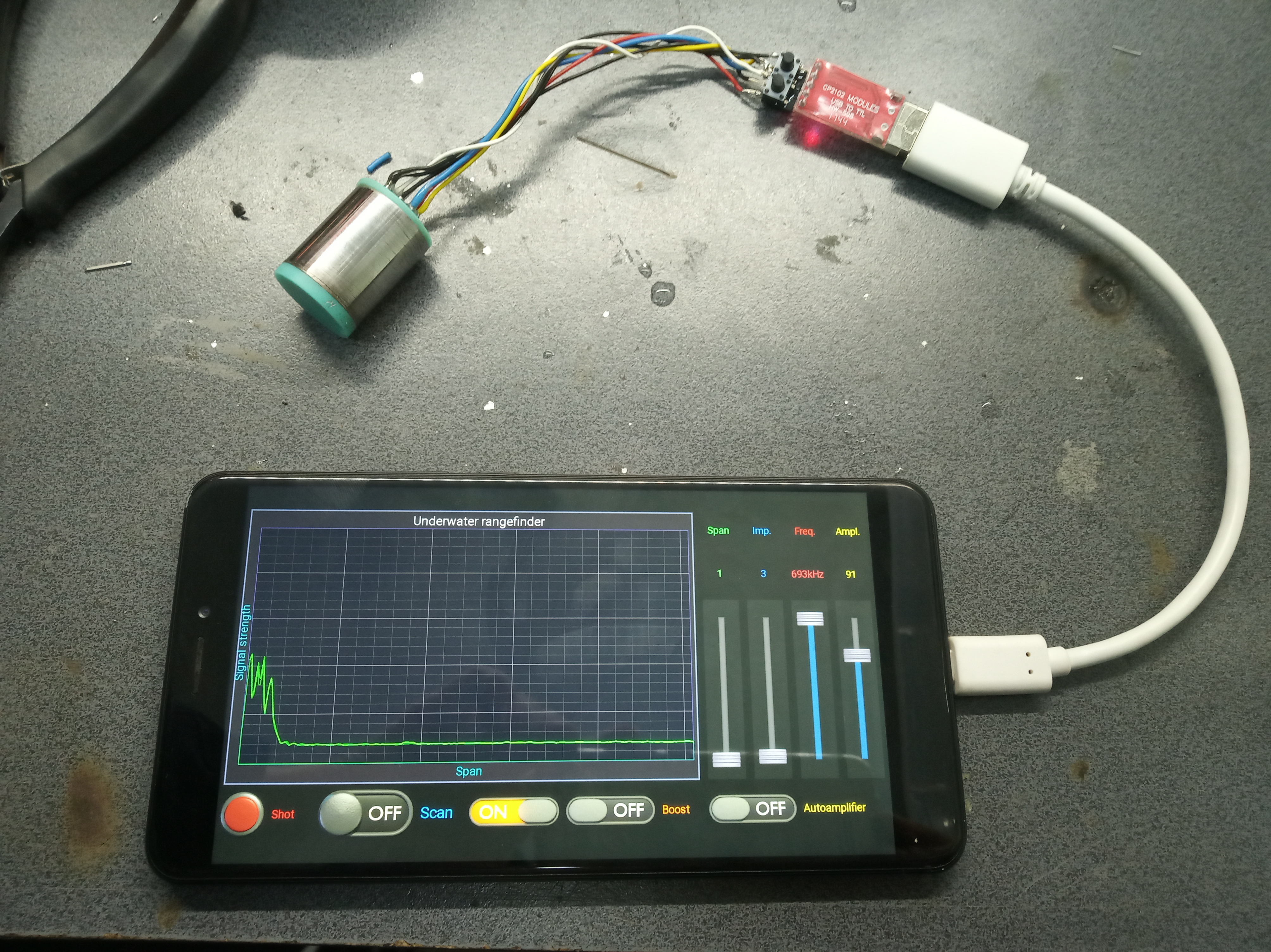
Y utilizando la aplicación de teléfono inteligente Bluetooth Electronics y el convertidor USB-> UART, puede implementar una versión más móvil de la configuración de prueba.

Actualmente estamos trabajando en el próximo prototipo del módulo de telémetro, ya que realmente hay algo que mejorar.
Por ejemplo, realice una amplificación gradual de la señal de entrada, de modo que la reflexión de los objetos cercanos no se desplace, y la amplificación de los objetos distantes sea máxima. Tal vez aplique una base elemental más barata. Considere la opción de llenar el interior con algún tipo de compuesto o aceite de silicona para sellar y soportar alta presión.
¡Nos vemos en el próximo número!