Probablemente no sabes cuánto aprecio a
Habr . Este no es solo un sitio con información relevante. Esta es una comunidad de personas en red. En esta publicación, una breve historia sobre cómo
Habr cumple sus sueños . Cómo en 6 meses puedes hacer un MVP a partir de una idea, encontrar inversores y crear algo nuevo. La publicación que no debe temer implementar ideas, no los deje acumulando polvo hasta mejores tiempos. Debajo del corte, hay muchas fotos del campo, de un viaje a la República Dominicana, metamorfosis del robot debido al trabajo en red.
Quizás nuestra historia lo motive a darse cuenta de sus ideas que han sido tramadas durante mucho tiempo, pero que no se atrevieron a convertirse en vida. Para hacer esto, el artículo se
pone en contacto con fondos de inversión en la Federación de Rusia .
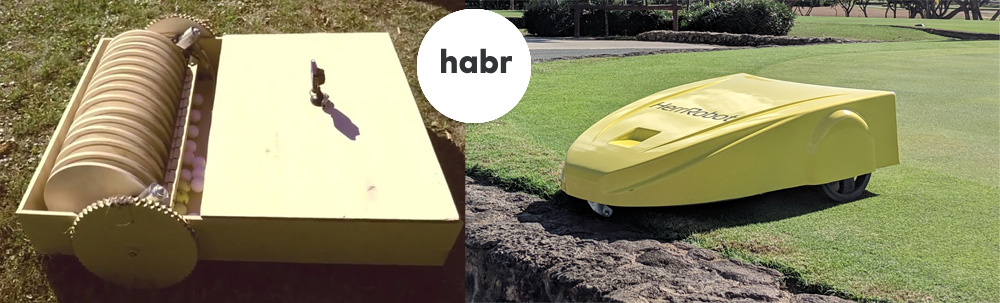
En el golf hay un campo de prácticas, este es un campo de entrenamiento para practicar tiros largos y medianos. Pueden aparecer hasta 20,000 objetivos por día. Estas bolas deben recogerse de alguna manera. Por lo general, se utiliza equipo especial conectado al automóvil para la recolección. Estos son costos de personal, mantenimiento de equipos, daños a las bolas por equipos, daños al campo.
En el verano de 2018, mi amigo Michael Vikrent, un maestro de golf en Alemania, habló sobre el dolor de los administradores de palos de golf, y encontré una solución en forma de robot. Monté el primer prototipo de madera contrachapada y escribí un
artículo al respecto
en habr.com y obtuve una amplia respuesta. Ahora, ya somos 4 personas en el equipo, profesionales con experiencia en empresas globales.
El mensaje principal de la publicación es que es posible que no tengas todo perfecto, es importante actuar. Si mantuviera mi idea, la protegiera y la valorara, no saldría nada de eso. Hice la primera opción (muy lejos de ser ideal) y hablé sobre ello. Esto ayudó a encontrar personas de ideas afines con quienes, espero, seguiremos siendo buenos amigos. ¡A continuación se muestra una foto de nuestro equipo de Moscú!

Más adelante en el caso, la mecánica, el tablero de control y el software, me gustaría mostrar lo que fue al principio y cómo se ve ahora. El progreso es especialmente notable debido al bajo efecto base.
Vivienda
La primera versión del cuerpo fue terrible y gritó que necesitábamos un hombre para resolver este problema. Habr ayudó a encontrar a esa persona. Ahora el caso está siendo diseñado por
NikitaKhvoryk .
Primera opción Opción de fibra de vidrio para evaluación dimensional.
Opción de fibra de vidrio para evaluación dimensional. Formación de vacío
Formación de vacío
La versión actual es con pintura y refuerzo de fibra de vidrio.

El progreso es visible a simple vista, y esto es todo el resultado de la creación de redes.
Bajo corus
Para facilitar la fabricación de la estructura, la parte inferior del cuerpo está hecha de material compuesto y fresada. En cada iteración, agregamos nuevas partes y agujeros al cuerpo, que en el anterior fueron modificados por las manos.

La mecanica
Todo era adecuado para probar la idea, incluso motores que no eran todos y engranajes impresos.

Por supuesto, todo esto tuvo que ser reemplazado para un mayor desarrollo, incluso el cambio de motor y la impresión de engranajes de chevron no ahorraron. Esta opción de manejo no es final, ahora estamos esperando una correa de distribución y poleas para facilitar el diseño.

Tarifa
Primero hubo una palabra, luego una placa de pruebas. ¿Cómo se ve el entrelazado de cables? Así es, la cuna del gato.
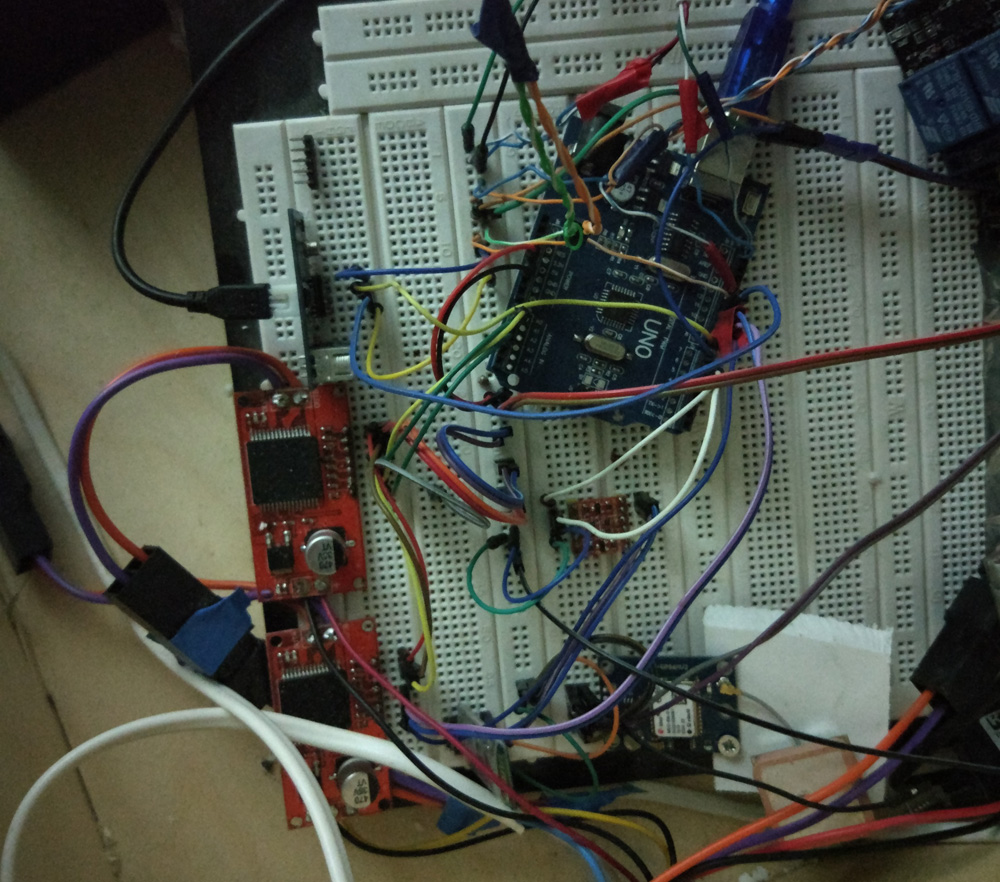
Así es como se veía la primera placa de pruebas compacta.

Luego, el usuario
SkyserR se puso
manos a
la obra . Diseñó y ensambló una placa de conexión de módulo para la versión raspberry pi.
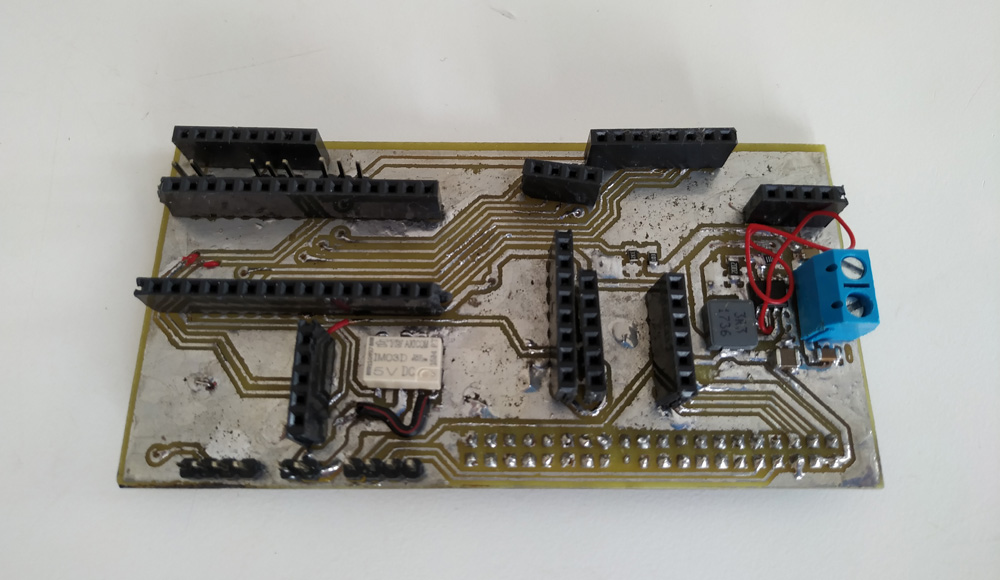 Versión de tablero de Resonite
Versión de tablero de Resonite
La versión con Ardupilot está siendo desarrollada por Vladimir Goncharov
Shadow_ru . Puedes leer sobre esto
aquí .
Agradecemos a
Process0169 ,
Trif ,
tersuren ,
vasimv ,
vovaekb90 ,
r00mka , Vyacheslav Soldatov, Levon Zakaryan, Sergey Pomazkin, Vladi Kuban, Karen Musaelyan, Alexei Platonov por la ayuda y el asesoramiento. Si quieres ayudar, escríbeme en LAN o
VK ,
FB .
Software
Inicialmente, todo el software fue autoescrito. Python scripts y bocetos Arduino. Pero cuando se cansó de andar en bicicleta cambió a Ardupilot y ROS.
Tenemos MVP y ahora estamos desarrollando simultáneamente parte de hardware y software. Utilizamos soluciones de código abierto y escribimos nuestro propio software. Tenemos socios socios en Rusia y China que nos suministran componentes.
Transformando un experimento en un producto desde un hobby
En octubre, quedó claro que este proyecto podría convertirse en comercial. Enviamos una solicitud al Acelerador de Sberbank y 500 Startups, pero recibimos una respuesta sobre la discrepancia en el enfoque de inversión. En general, necesitaban proyectos para la etapa Preseed, que no encajábamos en ese momento. Luego, la solicitud de la "Subvención Competencia EXPO 2020 Dubai", ni siquiera recibimos una respuesta de ellos. Hemos presentado una solicitud a la Fundación para la Promoción del Desarrollo de Pequeñas Formas de Empresas (Fondo Bortnik) para el programa Start-1, estamos esperando una respuesta.
Discurso en el evento "Reconnaissance Fight"

Participamos en una sesión de pitch, hablamos sobre nuestro proyecto. Los contactos fueron recibidos por 3 fondos de inversión y dos inversores independientes. La participación es gratuita, los eventos están en curso. Lo recomiendo encarecidamente, le permite encontrar inversores, preparar su presentación, encontrar debilidades en el proyecto. Fue una reunión con uno de los fondos del evento que hizo posible recibir la primera oferta.
Foto Combate de inteligencia Después del evento, enviamos una presentación del proyecto a los fondos rusos. Esto nos permitió recibir una invitación para una segunda reunión y comenzar las negociaciones.
Contactos de fondos en la Federación de Rusia También una buena opción es contactar a un inversionista que tenga un proyecto similar en su cartera o invierta en este tema.
Usé el sitio
rb.ru/company/?niche=119 y elegí startups de robótica. Analizó quién invirtió en ellos y les envió una presentación. Este método es adecuado para el primer toque. No es un hecho que alguien tome en serio tales correos electrónicos, pero aumenta significativamente la base de contactos. Cómo usarlos depende de usted.
Fondos en los Estados Unidos para los cuales estamos preparando solicitudes.- Combinador Y
- 500 arranques
- Plug and play
- Techstars
- Campo de semillas
- SOSV
- StartUpBootCamp
- Starta
Si tienes experiencia presentando un proyecto en los Estados Unidos y quieres ayudarnos con esto,
escríbeme en las redes sociales.Viaje a la República Dominicana en febrero de 2019
"Esto es un robot que colecta las bolas de golf" - Dije, porque no sé cómo sería el español "No, esto no es una oveja electro", creo que sonaría aproximadamente igual para un anciano de Haití soleado y fraterno.

Habroyzer
tersuren nos invitó a la República Dominicana. Así que tuvimos la oportunidad de probar nuestro robot en el invierno y no esperar hasta mayo para resolver los
algoritmos para construir la trayectoria por GPS. Al mismo tiempo, las pruebas se realizaron en uno de los mejores clubes de golf del mundo. Grabamos un video del robot trabajando en un club de golf, que fue muy útil para comunicarse con los inversores y demostrar las capacidades del robot.
Vasimv vive y trabaja en la República Dominicana en una
cortadora de césped robótica . Teniendo en cuenta los puestos permanentes en la cima de la emigración, si está involucrado en ROS, robótica o electrónica, mientras piensa en
mudarse de su lugar de residencia durante mucho tiempo, escriba a
tersuren .

Volar con un robot es toda una historia. Además del robot 1100 * 800 * 300, también era necesario transportar piezas de repuesto, pertenencias personales. En general, llevé una computadora portátil y baterías en una mochila. Y objetos personales, regalos de Rusia, motores de repuesto, ruedas, cables, etc. colocado justo en el robot, en el compartimento de bolas. Deberías ver las caras sorprendidas del aeropuerto y las aduanas. El robot fue llevado allí varias veces en el escáner. Terminé en ambos casos con la pregunta:
¿Es eso lo que? Dada la enorme inscripción HERROBOT a bordo, me pareció que no habría preguntas. Y así, después de todo, ¡está claro!
Fotos de la República Dominicana No sin Epic-fail. Nos apresuramos a ordenar el tablero de manera resonante, por lo que uno de los contactos resultó estar confundido. Estaba soldado con mocos. Debido a la humedad, el conductor en el cableado trabajó a través del tiempo. No podría haber ninguna prueba de algoritmos con problemas de bajo nivel. "Soma gramos y sin dramas". Luego cambiamos a las versiones de prueba en Beaglebone y Ardupilot.
Yo, superando el calor, y
Shadow_ru superando el frío con una diferencia de 7 horas debido a las zonas horarias, introduje cambios urgentes en el Ardupilot para que funcione en nuevas condiciones. Los ESC, reemplazados por los quemados, deberían haberse sacado de la tienda en línea el día antes de la salida de Rusia, pero no el destino. Los controladores existentes entendieron PWM, y beaglebone tercamente emitió solo la frecuencia para el serv. Al final, tuve que hacer un puente desde Arduino. Todo se hizo a toda prisa, pero de repente alguien necesita un código.
Boceto de puente para convertir frecuencia a PWM#include <math.h> int ch0,ch1,pwm,pwm2; void setup() { //Declaring LED pin as output pinMode(A1, INPUT); pinMode(A0, INPUT); pinMode(2, OUTPUT); pinMode(3, OUTPUT); pinMode(4, OUTPUT); pinMode(5, OUTPUT); pinMode(6, OUTPUT); pinMode(7, OUTPUT); Serial.begin(9600); while (!Serial) { ; // wait for serial port to connect. Needed for Leonardo only } } void loop() { ch1 =pulseIn(A1, HIGH); if(ch1<1470){ pwm=(1500-ch1)/2; analogWrite(7, pwm); digitalWrite(6,LOW); digitalWrite(5,HIGH); }else if(ch1>1530){ pwm=(ch1-1500)/2; analogWrite(7, pwm); digitalWrite(6,HIGH); digitalWrite(5,LOW); }else{ pwm=0; analogWrite(7, pwm); digitalWrite(6,LOW); digitalWrite(5,LOW); } ch0 =pulseIn(A0, HIGH); if(ch0<1470){ pwm2=(1500-ch0)/2; analogWrite(4, pwm2); digitalWrite(3,LOW); digitalWrite(2,HIGH); }else if(ch0>1530){ pwm2=(ch0-1500)/2; analogWrite(4, pwm2); digitalWrite(3,HIGH); digitalWrite(2,LOW); }else{ pwm2=0; digitalWrite(3,LOW); digitalWrite(2,LOW); } Serial.print("ch0="); Serial.println(ch0); Serial.print("ch1="); Serial.println(ch1); Serial.print("pwm2="); Serial.println(pwm2); for(int i=0; i<255; i++){ delay(5); } }
Video promocional después del viaje
Video de renderizado 3D antes del viaje
Ahora solo hay un competidor en el mundo y cuesta $ 15,000. En el mundo de 34,000 palos de golf, todos gastan al menos $ 1,500 / masa en recoger pelotas. Este es un mercado de más de $ 600M / año. Nuestro programa mínimo es la venta y posterior mantenimiento de 1000 robots. Incluso cuando se vende a un precio 40% más bajo que el de la competencia, sus ingresos son de aproximadamente $ 8 millones.
Tenemos un acuerdo preliminar con clubes de golf interesados en probar el robot en su campo en Alemania, Australia, Nueva Zelanda, Suecia y República Dominicana. Y todo esto gracias a Habr.
¿Sabes cómo cumplir tus sueños y hacer realidad tus ideas? Calma Solo cierra los ojos y disfruta el momento. Ningún Eckhardt Tolle te contará sobre el poder del momento, si te desplazas por los mismos pensamientos y no te dan descanso. Agrega detalles a su proyecto, pero no comience a hacerlo. Olvidas por un tiempo, y luego qué tipo de disparador vuelve a causar imágenes de la idea para el proyecto soñado. Esta es exactamente la razón para comenzar a hacer. ¡No esperes el momento perfecto, momento perfecto ahora!

¿Es necesario un robot así? El golf no está tan extendido en Rusia hasta ahora, pero recurrimos a expertos de la industria para conocer su opinión. Todos están de acuerdo en que este robot es necesario.


Nos dirigimos a los líderes del mercado de la robótica en Rusia para conocer su opinión sobre los robots de servicio para resolver tareas rutinarias. Sin duda, esta es una tendencia difícil de discutir.

Refinaremos y promoveremos nuestro robot, porque no podemos sino hacer esto. Para acelerar, ¡necesitamos su ayuda y apoyo!
Planes
A principios de marzo tenemos otro lanzamiento planeado. ¿Por qué, si ya hay una oferta? Todavía no lo sé, vamos como Siddhartha, el camino nos encuentra. En marzo, necesitamos finalizar todos los algoritmos para el trabajo completo y comenzar a probar los campos de golf en la Federación Rusa en abril. En junio, participación en la exposición, publicación en publicaciones europeas de golf. Durante el verano de 2019, debemos hacer 25 robots y comenzar las pruebas en Alemania y República Dominicana. En el otoño, comience a vender como un servicio. Y en 2020, ingrese al mercado estadounidense.
En 2020, publique un modelo de cortadora de césped que funciona con el mismo algoritmo para construir una trayectoria para resolver todos los problemas en el campo de prácticas.
Estos son hitos simples, gracias por su apoyo.
Nuestras publicacionesPD: Este robot no hubiera sido si no fuera por
Habr .