La industria automotriz actualmente está experimentando una revolución en la conducción autónoma. Un vehículo no tripulado puede proporcionar un mayor nivel de seguridad para los pasajeros, porque su gestión carece del factor humano. El uso generalizado de vehículos no tripulados en el futuro reducirá la cantidad de accidentes y también ahorrará el tiempo que las personas pasan manejando diariamente.
OSCAR (Open-Source CAR) es un proyecto de investigación del vehículo no tripulado StarLine de código abierto, que combina las mejores mentes de ingeniería de Rusia. Llamamos a la plataforma OSCAR porque queremos que cada línea de código relacionada con el automóvil esté abierta a la comunidad.

Anatomía de la plataforma
Como usuario del vehículo, al propietario del automóvil le gustaría llegar del punto A al punto B de manera segura, cómoda y a tiempo. Las historias de los usuarios son diversas, que van desde un viaje al trabajo o de compras y terminan pasando el rato con amigos o familiares sin la necesidad constante de vigilar la carretera.
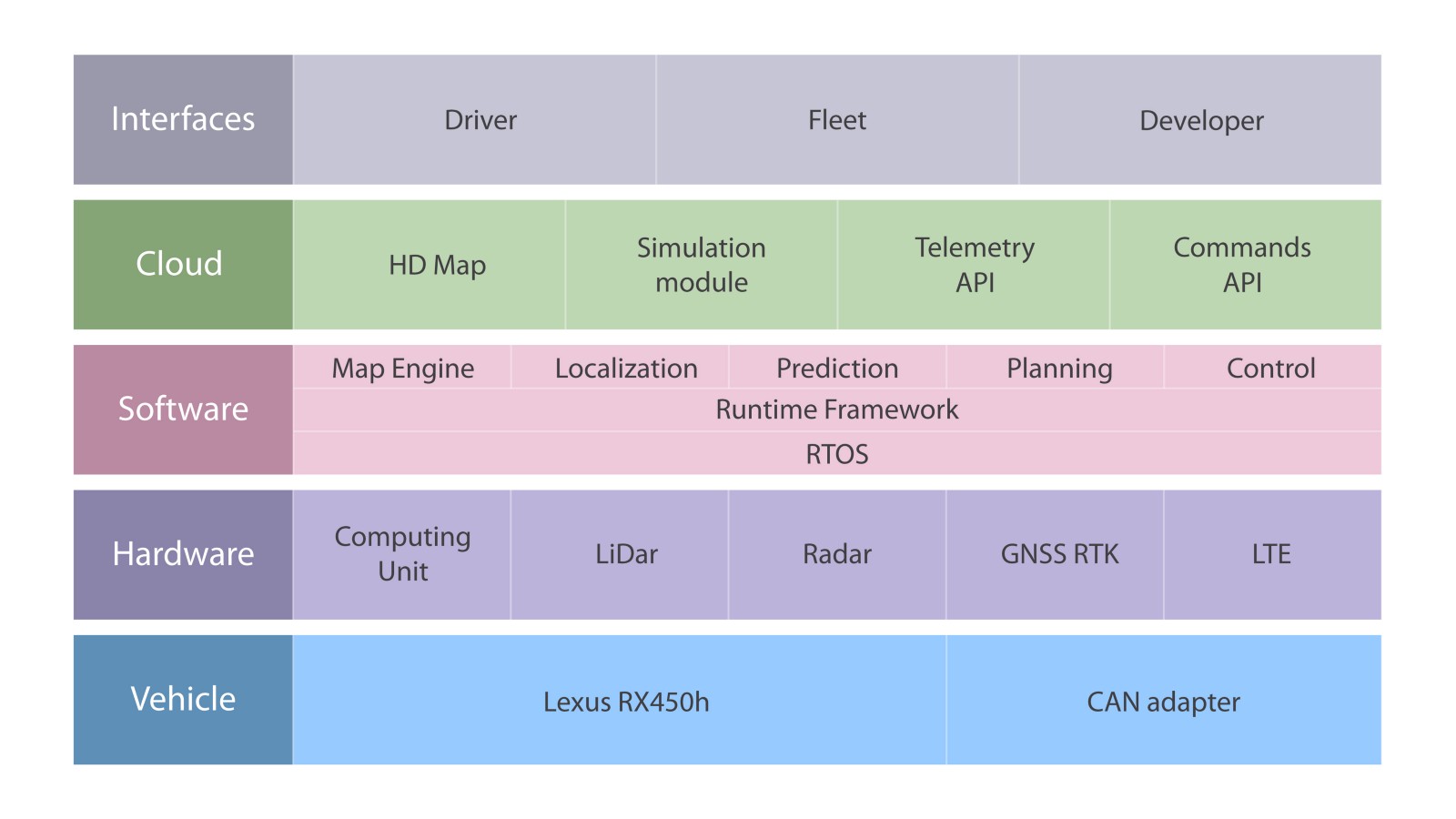
Por lo tanto, el nivel más alto de la plataforma son las aplicaciones y entornos de usuario. Confiamos en tres grupos de usuarios: usuarios individuales, comerciales y desarrolladores de plataformas. Para cada uno de estos grupos hoy estamos diseñando una interfaz separada. El segundo nivel es la parte del servidor, que incluye mapas de alta resolución, un módulo de simulación y API que sirven al automóvil. El nivel de software es la creación de programas que se integrarán en el automóvil. Y los dos niveles inferiores de la plataforma son el trabajo en el propio automóvil, lo que implica examinar la interfaz digital de la máquina e instalar equipos.
Coche
Un automóvil moderno puede tener hasta 70 unidades de control electrónico para varios subsistemas. Por lo general, el procesador más potente es la unidad de control del motor, mientras que otros se utilizan para controlar la transmisión, los airbags, el sistema antibloqueo de frenos, los sistemas de audio, el ajuste del espejo ... Algunos de ellos forman subsistemas independientes, mientras que otros intercambian información y comandos entre ellos.
Para garantizar la comunicación entre los dispositivos del vehículo, se desarrolló el estándar CAN.
CAN-bus es un estándar de red industrial, así como un sistema de comunicación digital y control de dispositivos eléctricos de un automóvil. Los dispositivos del automóvil están conectados al bus CAN en paralelo para enviar y recibir datos. Al tener acceso a esta interfaz digital, puede, por ejemplo, encender el motor, abrir puertas, plegar los espejos del automóvil con comandos de control.
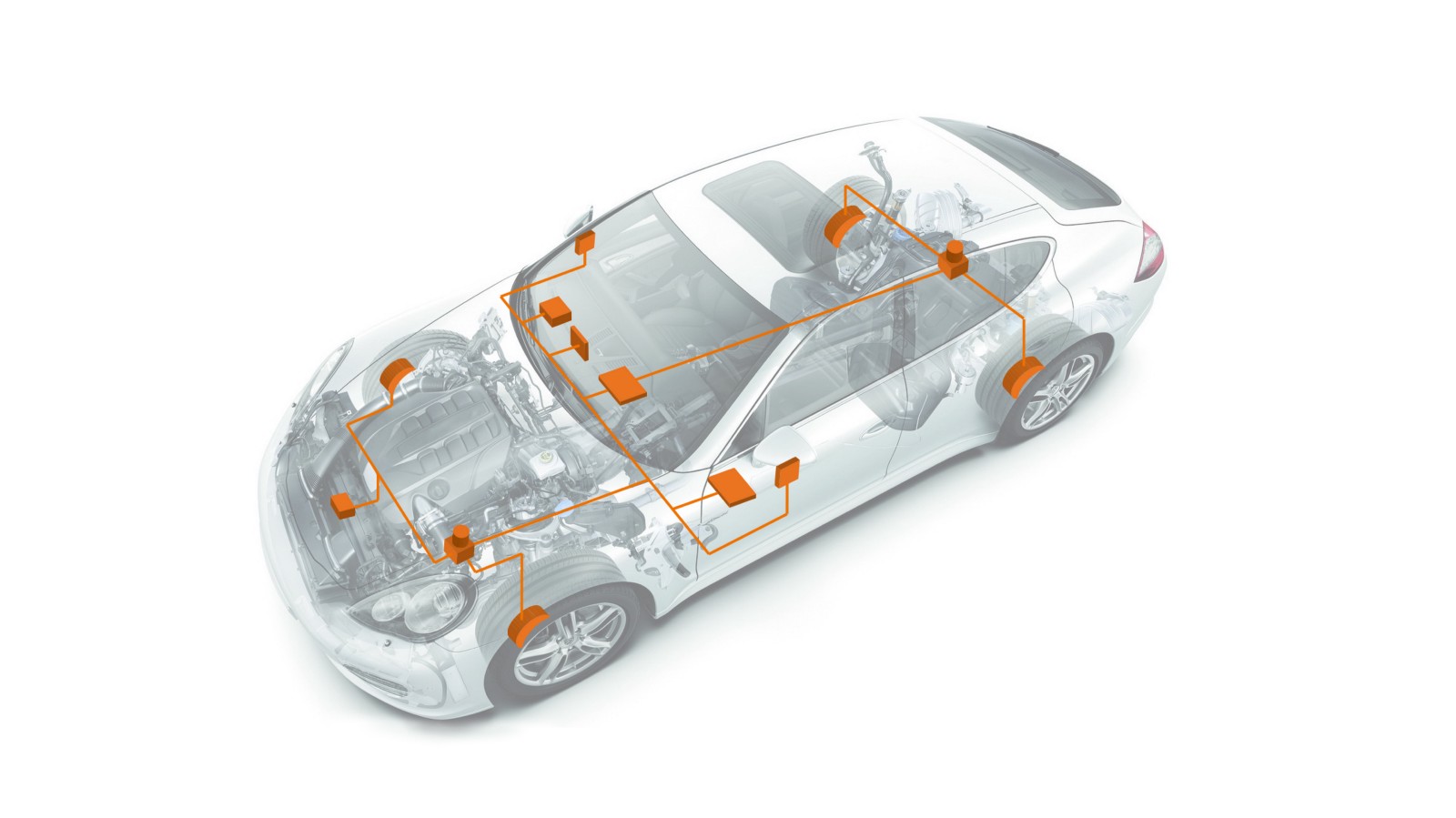
Para controlar la aceleración y la dirección del automóvil, necesitábamos acceder al bus CAN y comprender los tipos de paquetes correspondientes. NPO StarLine es un fabricante de dispositivos electrónicos, por lo que hemos desarrollado nuestro propio adaptador de bus CAN.

Actualmente, podemos dirigir, frenar y acelerar usando una computadora portátil.

Equipo
Un área importante de trabajo es equipar el vehículo con sensores y sensores. Existen varios enfoques para equipar un vehículo no tripulado. Por ejemplo, algunas compañías usan costosos lidares, mientras que otros los rechazan, limitándose a las lecturas de otros dispositivos.

Ahora el auto StarLine no tripulado está equipado con varias cámaras mono y binoculares, radares, lidares, así como navegación por satélite.
La tarea del receptor GPS es determinar su ubicación en el espacio, así como la hora exacta. Los receptores de GPS civiles tienen una precisión insuficiente para posicionar un vehículo no tripulado; el error puede ser de hasta varios metros. Esto ocurre tanto por el reflejo de la señal de las paredes de los edificios en un entorno urbano, como por factores naturales mal pronosticados, por ejemplo, cambios en la velocidad de una señal de un satélite en la ionosfera de la Tierra.
Para posicionar un vehículo no tripulado, el error del receptor GPS civil es demasiado grande y, por lo tanto, en nuestro desarrollo, utilizamos navegación por satélite ultra precisa. Para hacer esto, se instaló un receptor GNSS RTK en el automóvil, que utiliza técnicas de posicionamiento más avanzadas y, por lo tanto, logra una precisión de posicionamiento en centímetros solo a través de la navegación por satélite.
Pero mientras conduce, el automóvil puede terminar en un túnel o debajo de un puente, donde las señales de los satélites son demasiado débiles o están completamente ausentes. Debido a esto, la precisión del receptor GNSS-RTK disminuirá o el posicionamiento será completamente imposible. En estos casos, el automóvil refinará su posición utilizando las lecturas del odómetro y el acelerómetro. Los algoritmos que combinan datos de varias fuentes dispares para reducir la incertidumbre se denominan algoritmos de fusión de sensores.
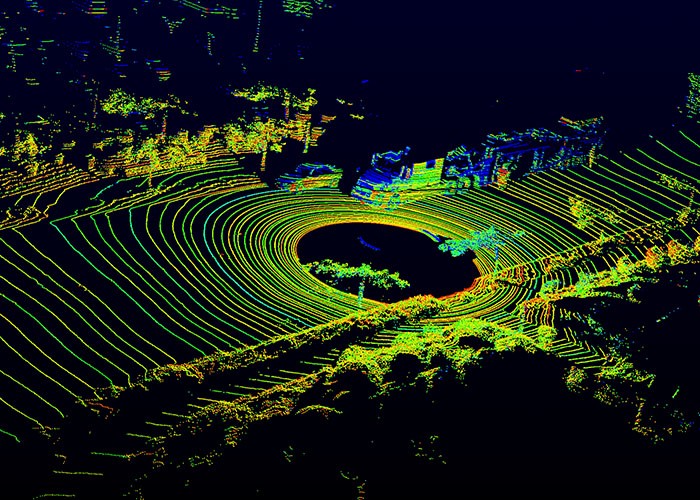
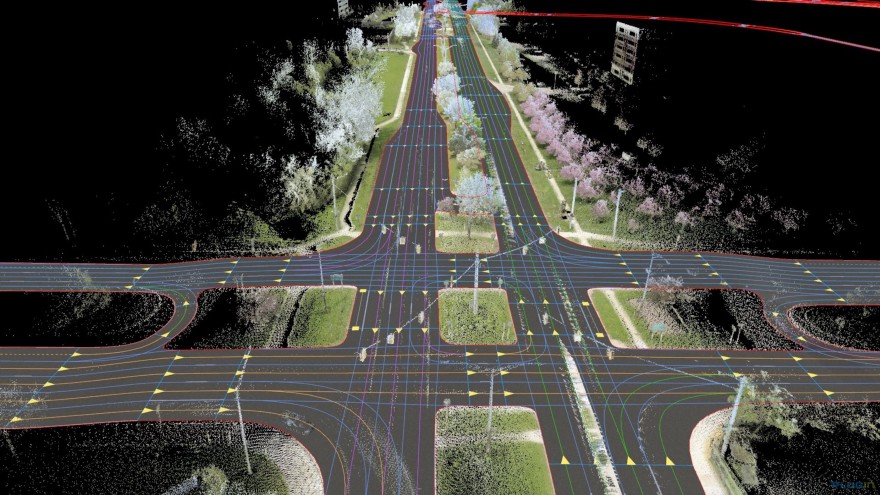
Además de la tarea de localizar un vehículo no tripulado, también es necesario tener una idea de los obstáculos dinámicos que no están en el mapa, por ejemplo, automóviles que se mueven cerca o personas que cruzan una carretera. Para estos fines, un vehículo no tripulado utiliza datos de radar y lidar. El radar usa ondas de radio para detectar obstáculos y también, gracias al efecto Doppler, le permite calcular sus velocidades radiales. Lidar es un buscador de rango óptico activo que escanea constantemente el espacio circundante y forma su mapa tridimensional, la llamada nube de puntos.
Cada dispositivo que se utiliza en un vehículo no tripulado (desde la cámara hasta la unidad RTK GNSS) debe configurarse antes de poder instalarse.
Software
En la escala más grande, el software de drones consta de varios módulos, que incluyen: reconocimiento, planificación, localización y control.
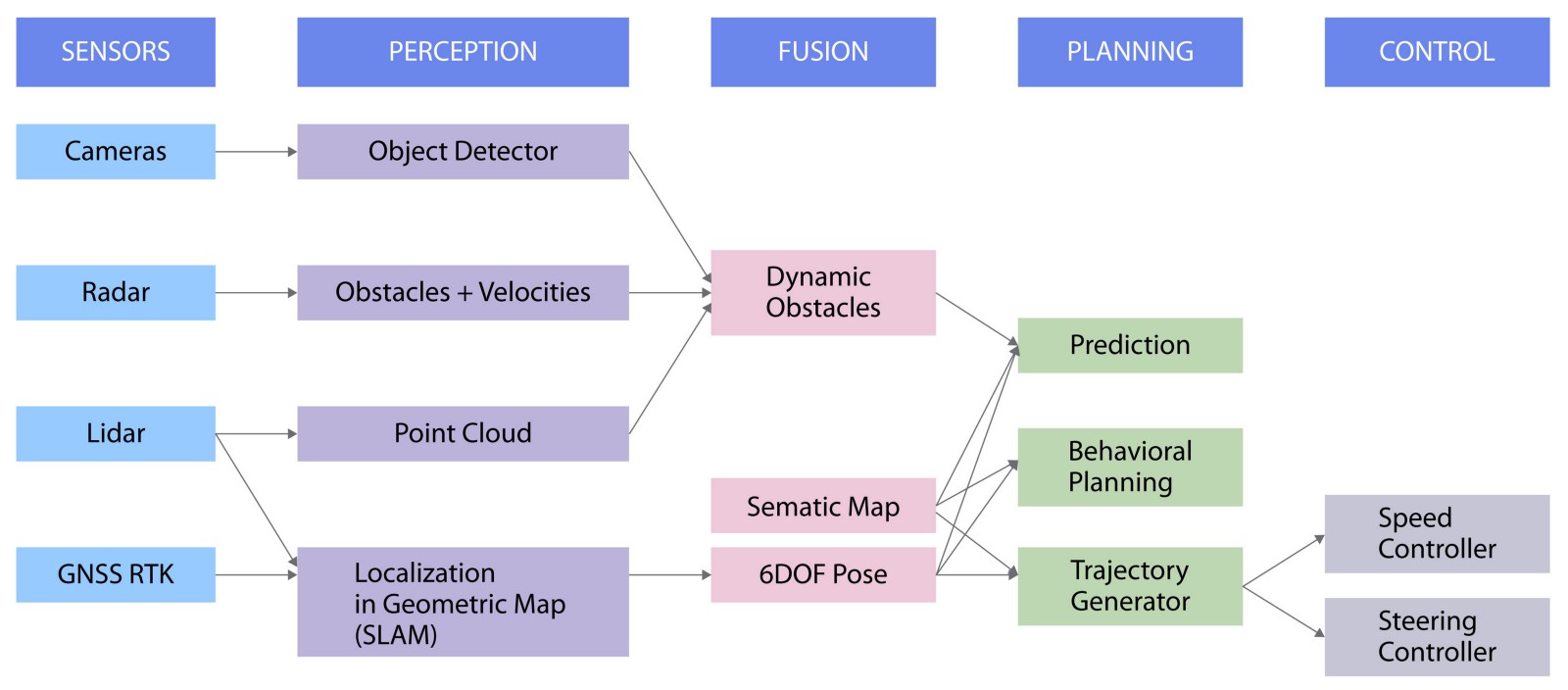
Los datos de las cámaras se utilizan para reconocer y detectar objetos, los radares reciben las coordenadas y las velocidades de los objetos circundantes, los lidares proporcionan al algoritmo una nube de puntos y el módulo GNSS RTK utiliza datos satelitales para localizar el automóvil.
Luego, los datos de las tres primeras fuentes se combinan para obtener información sobre los obstáculos cerca del automóvil.
Al mismo tiempo, las lecturas de satélite y lidar se utilizan para resolver el problema SLAM, lo que significa localización y mapeo simultáneo del terreno. Este es un enfoque para crear un mapa de un entorno desconocido con el seguimiento de la ubicación de un objeto en él. Esta información se utiliza para calcular las 6 coordenadas del automóvil, que incluyen tres coordenadas espaciales y velocidad tridimensional.
El siguiente paso es planificar la trayectoria local del vehículo. El último paso es el módulo de control, que se utiliza para ejecutar realmente la trayectoria construida durante la construcción de la pista.
Actualmente, nos dedicamos a configurar e instalar equipos y también estamos trabajando en un módulo de control de automóviles.
Nube
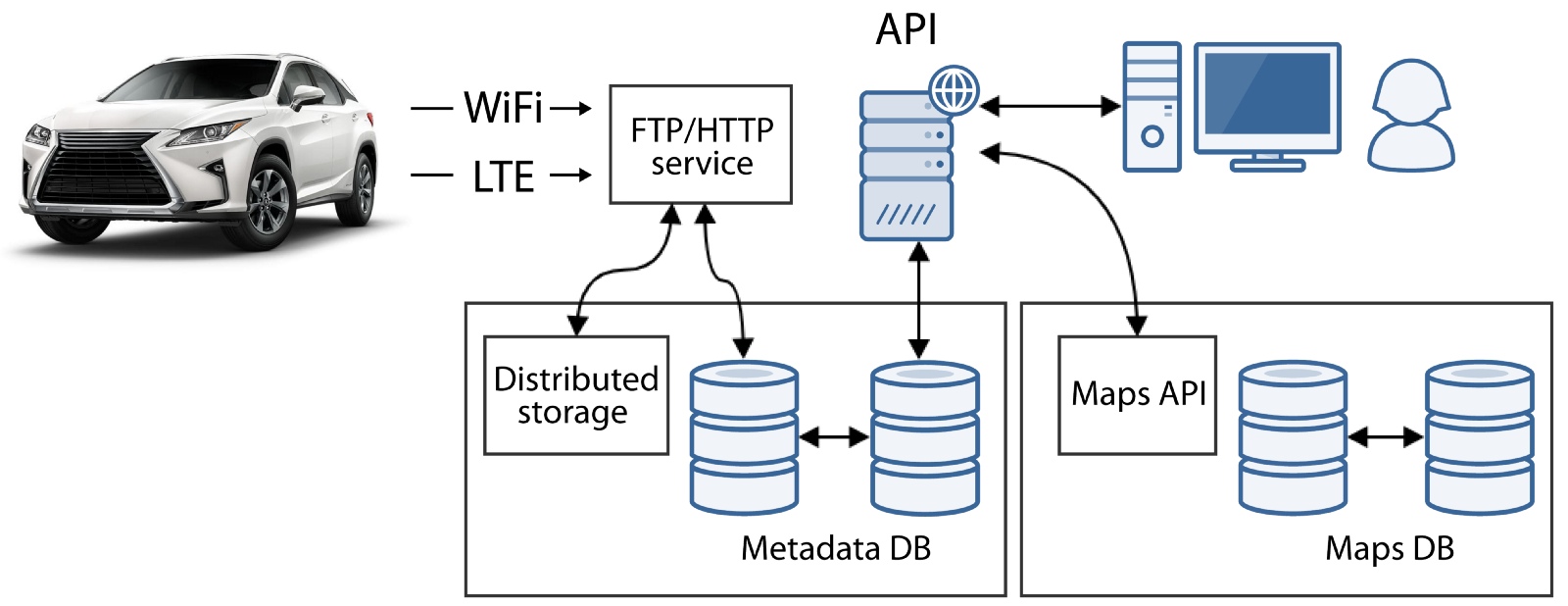
La parte del servidor consta de cuatro bloques:
- Tarjetas HD
- API de telemetría
- API de comando
- módulo de simulación
Primero, necesitamos un almacenamiento para mapas para ubicar correctamente el automóvil, así como un servicio de telemetría para el análisis de datos. Este es nuestro primer diagrama de arquitectura del servidor, que incluye dos bloques. Más tarde lo expandiremos utilizando la API de comandos para poder enviar comandos de control al automóvil desde el servidor. También agregaremos un módulo de simulación.
Los mapas HD son mapas que ofrecen una imagen completa del mundo real precisa al centímetro, incluyendo todo lo relacionado con la infraestructura vial, por ejemplo, información sobre carriles, señales y la posición de los semáforos. El mapa también puede contener datos LIDAR para permitir que el dron se localice en él.
Se necesitan simuladores para generar situaciones de tráfico para la depuración y las pruebas. Al simular situaciones de tráfico, podemos aumentar la robustez de nuestros algoritmos al realizar pruebas unitarias en un número arbitrario de millas de escenarios personalizables y condiciones raras, por una fracción del tiempo y el costo que se requerirían para probar en carreteras reales.

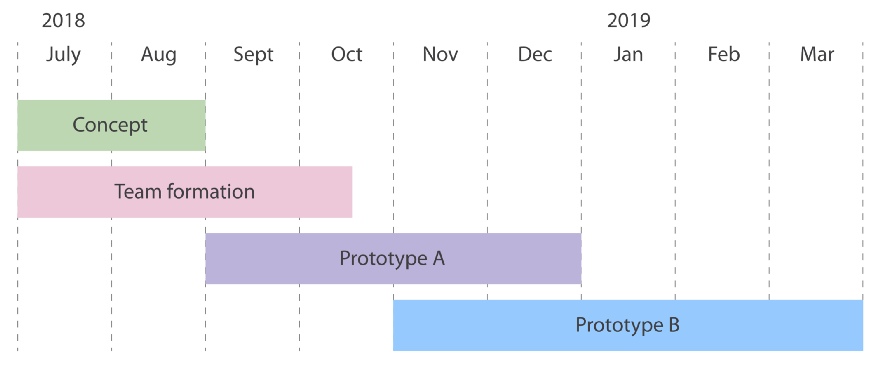
Hoja de ruta
En julio, comenzamos desarrollando un concepto, creamos un equipo y comenzamos el camino hacia el prototipo A. El prototipo A es un automóvil que puede moverse a lo largo de puntos de referencia, pero requiere la intervención del operador para evitar obstáculos. El prototipo B, cuyo desarrollo planeamos terminar para la primavera de 2019, es un automóvil que puede sortear obstáculos sin el control del conductor.
Entonces, ¿qué tiene un dron en su corazón?
El automóvil se basa en algoritmos avanzados, flujos de datos, interfaces de alto rendimiento y equipos sofisticados. Además, el automóvil no solo necesita hardware y software, sino también aplicaciones de servidor y cliente. Este corazón tecnológico es abierto y confiamos no solo en la iniciativa del equipo de StarLine, sino también en la ayuda de la comunidad de código abierto.
El objetivo principal del vehículo no tripulado StarLine es el deseo de hacer que la vida de las personas sea más cómoda y segura. La tecnología es importante para nosotros, pero creemos que el conocimiento tecnológico y científico existe para servir a las personas, y este es el verdadero corazón de nuestro esfuerzo. Nos acercamos al día en que los equipos proporcionarán seguridad vial, y las personas tendrán la oportunidad de dedicar más tiempo a lo que es importante para ellos. Y si comparte nuestro punto de vista, nos complace invitarlo a unirse a nosotros para crear la tecnología del mañana.
Proyecto Gitlab