Esta historia trata sobre cómo construí una plataforma de robot móvil y el destino de mi "NanoBot-a" ...
Todo comenzó en 2008, cuando era joven ingenuo y estúpido, me dedicaba a la robótica y, en general, a varios mecatrónicos. La idea de construir un carro grande se instaló en mi cabeza exuberante mucho antes, y ahora, después de una larga gestación de un plan de fabricación, comencé a construir este milagro de los pensamientos de los niños.
Y di a luz a tal prototipo:

Marco de un tubo de perfil de sección cuadrada de 25x25 mm. Y sus dimensiones totales son 500x500x300 mm. Bueno, sí, entonces pensé a gran escala ... Dos motores de engranajes del limpiaparabrisas de un automóvil UAZ, ruedas de una pequeña bicicleta para niños, tuvieron que mover esta cosa, y al frente había dos veletas. Y este gigante fue construido en el departamento.
En vista del hecho de que los planes para los algoritmos de comportamiento eran "napoleónicos", una computadora completa tenía que estar a bordo del robot, no había dinero para mini-ITX, y encontré una PC normal en mi madre ATX. Todo esto fue bombeado al interior y al montón dos baterías de helio más, enfundadas todo con una organización de tres milímetros. vidrio y en general el artilugio resultó ser en parte hermoso, pero muy grande y pesado. No logré ponerlo en marcha, ya que surgieron dificultades con la electrónica, y de vez en cuando a veces abandoné el proyecto, y luego comencé a trabajar de nuevo ...

Al final, me di cuenta de que este diseño es muy engorroso, y dado que la idea principal aún permanecía en mi cabeza, se decidió comenzar de nuevo ...
Después de casi un año, comencé a diseñar. Luego, solo me interesó CAD e intenté estudiarlos yo mismo, como resultado realicé los dibujos primero en AutoCAD y poco después los traduje a 3D (cuando comencé a estudiar COMPASS 3D). Presentaré los dibujos y el modelo para acceso libre, quién sabe quién será útil o será interesante.
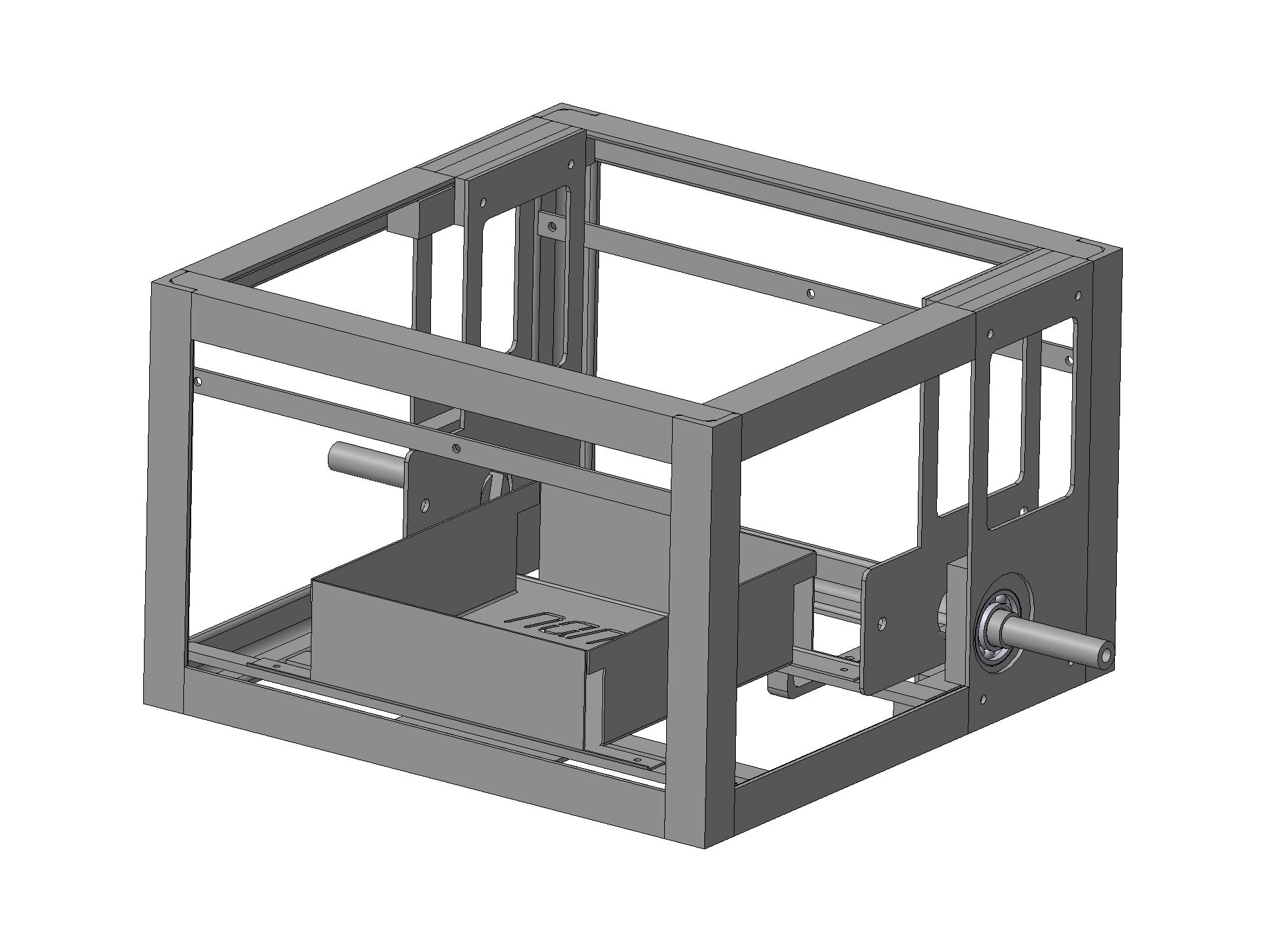
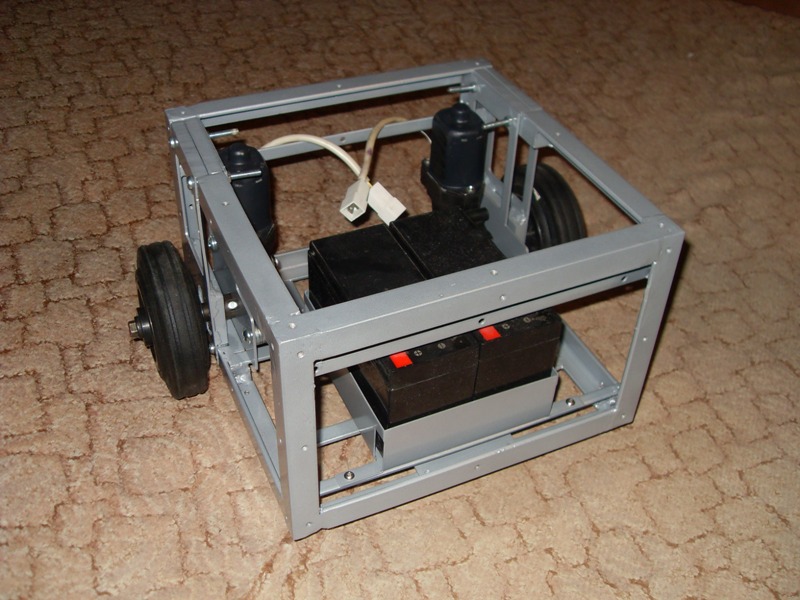
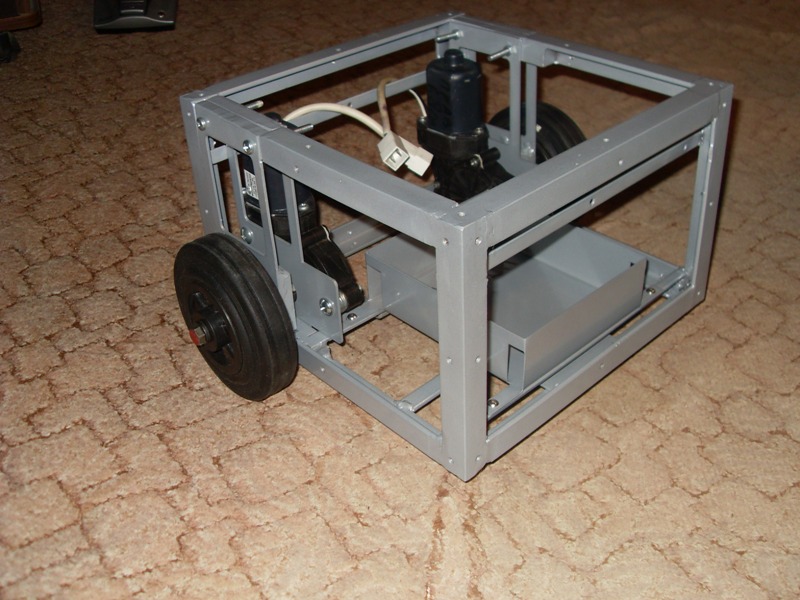
Entregué los dibujos a una fábrica familiar, donde me hicieron un marco para un par de botellas de vodka (Rusia, por lo que es caro). En tamaño, ya era más pequeño que el anterior 300x300x200, y se hizo desde la vigésima esquina. Además, las placas para la fijación del motor y un contenedor para colocar dos baterías de 12 voltios se cortaron con un láser CNC.

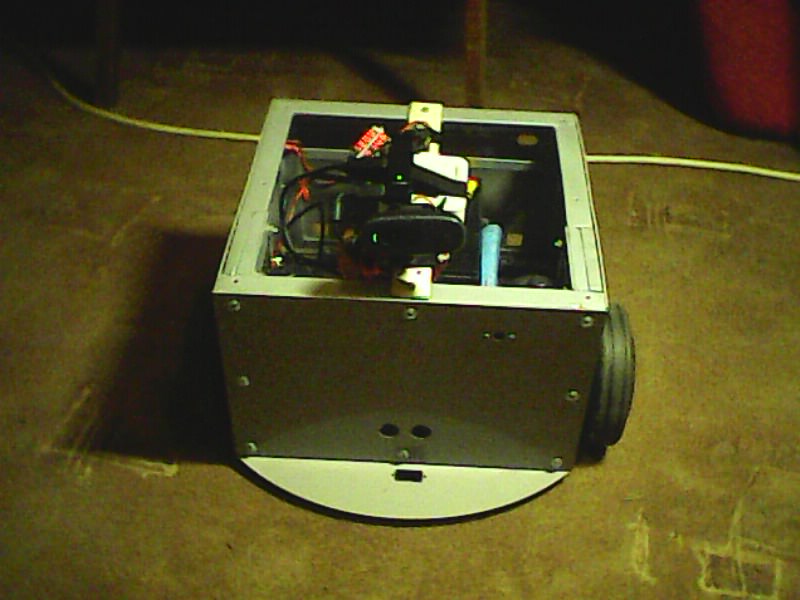
Como todo esto se hizo durante mucho tiempo, el marco logró oxidarse, y más tarde, lo di para pintar con pintura en polvo. Las ruedas con un diámetro de 125 mm se unieron directamente a los motores a través de los semiejes adicionales instalados en los rodamientos de bolas. Delantero montado una pequeña rueda de paleta. Decidí envainar el marco con hierro, luego parecía más tecnológico que cortado de la organización. vidrio, ya que conocía la oficina donde cortaban acero en el CNC, y luego se podía pintar en cualquier color ...


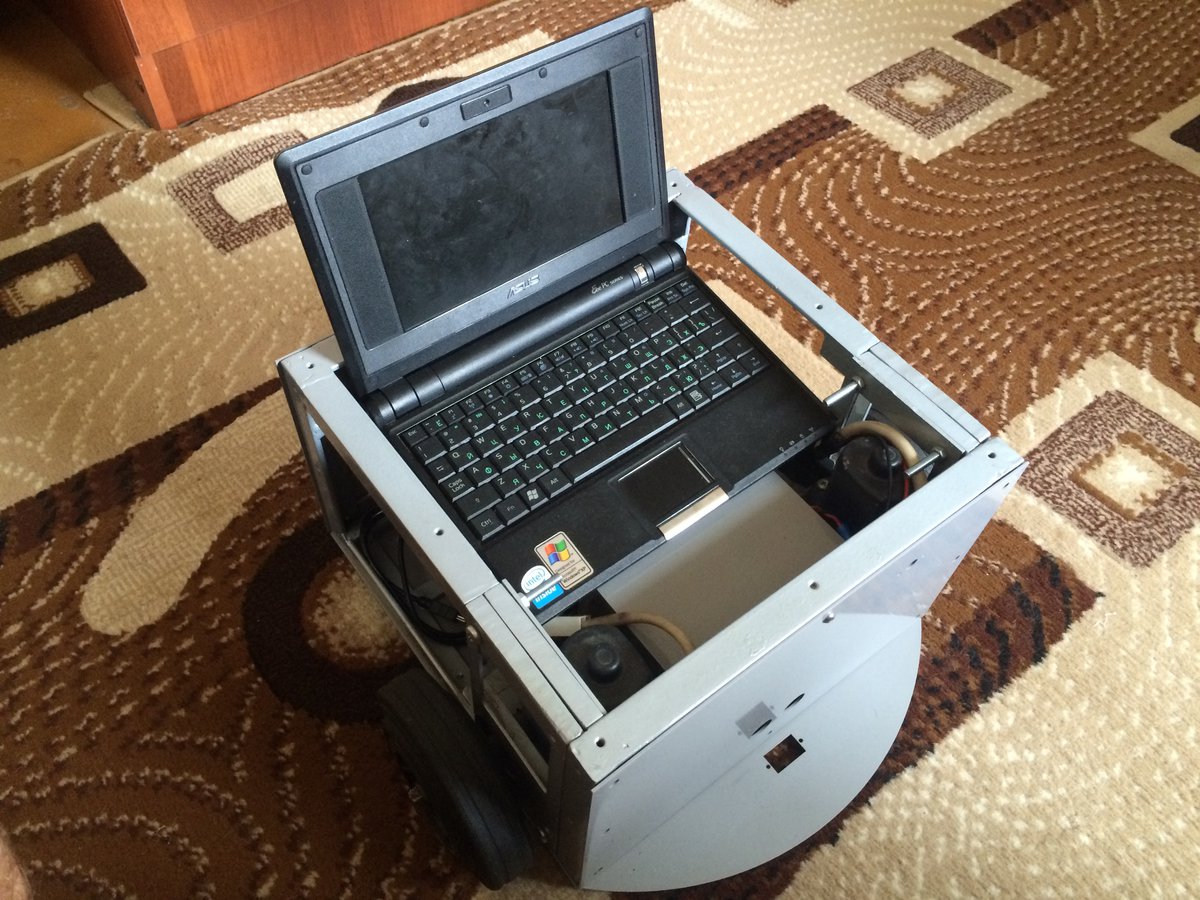
Con el marco, todo parece estar claro, pasemos a la electrónica. Se planeó controlar el robot de forma remota desde una PC y, a bordo, el robot también planeó colocar algo de computadoras pequeñas. Para ese momento, ya había logrado cortar un viejo netbook ASUS de un pariente, de tamaño que encajaba perfectamente en la parte superior del robot por encima de las baterías. Pero para controlar el robot, una netbook no es suficiente, para esto fue necesario comprar tres placas más de "Open Robotics", una placa basada en el microcontrolador AVR para controlar y recopilar datos OR-AVR-M128-DS, una placa para la comunicación con la netbook OR-USB-UART y controlador de la placa de potencia OR-MD2-10A-12V-X, ahora ciertamente habría hecho todo en arduino, pero no era tan popular, y estos módulos fueron diseñados específicamente para carros robóticos. Se planeó conectar varios sensores de telémetro, un par de codificadores a la placa de control, y se planificó controlar varios servos para cambiar el ángulo de exploración de los telémetros. Quería hacer un telémetro basado en un puntero láser y una cámara de video. Pero nunca llegó a eso, todo se limitó a conectar la electrónica y escribir un programa simple para la administración. Gestionado de forma remota utilizando el programa TeamViewer. En mi programa había una conexión simple al puerto, una ventana de recepción de transmisión de datos, una línea de entrada de velocidad (PWM en porcentaje) y varios botones de dirección.
Como resultado, debido a malentendidos con la electrónica, el proyecto se dejó sin la debida atención, se trató una vez muy raramente. Con el tiempo, me di cuenta de que era una pena tirar el desarrollo o ponerlo en el garaje. Decidí vender por un valor simbólico. Pensé que probablemente hay personas que también están interesadas en esto, que tienen un mejor conocimiento de la electrónica y la programación, tal vez alguien está trabajando en algún tipo de algoritmos de comportamiento / movimiento, bueno, o alguien simplemente necesita una plataforma publicitaria en la sala de exposiciones o tienda (por supuesto, podría romperse las piernas). )
Lo vendí por completo, junto con la electrónica, una batería, una netbook, telémetros y servos (recortes rectangulares con dos orificios en la cubierta redonda inferior y superior para los servos MG996r), una pantalla de 16x2 y un par de conjuntos de LED (recortes cuadrados en la hoja de revestimiento frontal justo debajo de ellos).

Según tengo entendido, la persona que compró mi plataforma de robot le dio una segunda vida. Me alegré de que esta pieza de hierro viviera. Fue en 2016, y el viaje comenzó desde la gloriosa ciudad de Ivanovo, hasta la ciudad heroica de Tula.
Sin embargo, recientemente, el tercer propietario me contactó y dijo que ahora tiene una plataforma (región de Kaliningrado). Aparentemente, algo salió mal con el primer comprador ... La persona que se contactó conmigo no me decepcionó, pero la plataforma se le entregó sin algunos componentes relacionados, pero de lo contrario todo parece estar intacto, pero no es sorprendente, ya que la piel del robot está hecha de metal 1.5 mm de espesor, es hora de que participe en batallas de robots ...
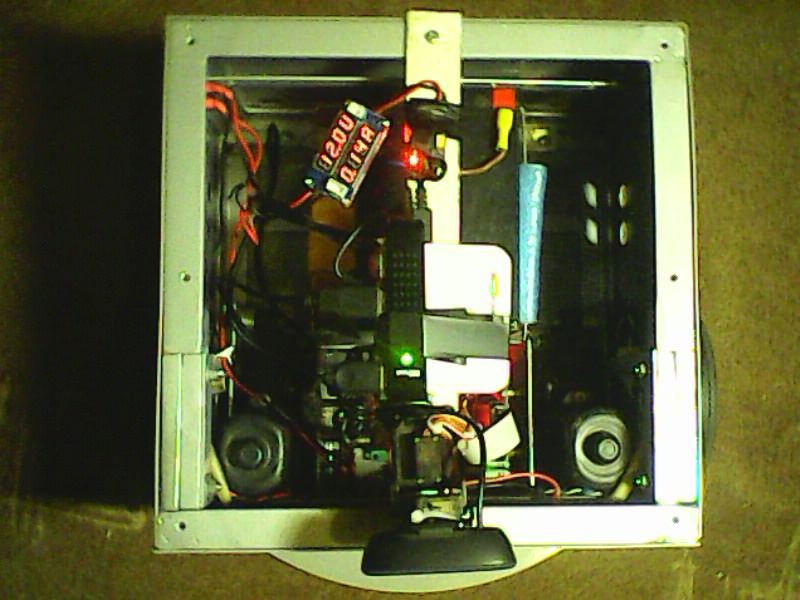
El robot recibió alguna actualización, y esto es lo que el nuevo propietario escribió al respecto:
“La plataforma ha venido a mí. Mediante algunas manipulaciones, se suministró una batería de 10 Ah 12V, un enrutador TL-MR3020 con firmware personalizado OpenRobotisc, una cámara web Logitech C270 en un soporte con un servo, un microcubo para 4 puertos y un convertidor DC-DC para alimentar el enrutador. Luego, todo esto se atornilló con reglas, cinta aislante y otros medios improvisados. "¡VIVIÓ! (C) Robocip" Un infernal tonto de hierro de 18 kg corriendo por una habitación pequeña como escaldada y capaz de derribar piernas y romper piernas en el peor ... Necesitamos cambiar las ruedas a las normales, cambiar la rueda de soporte, arreglar la electrónica normalmente y cultivar cables Y después de todos los ajustes y mejoras, esta caja milagrosa podrá conducir por el patio asustando a un gato y a un vecino wino. Y si coloca un manipulador chino en 6 servidores, puede manipular objetos de forma remota ".
Y esto es de las últimas noticias más recientes:
Aquí hay una historia sobre mi bebé, espero que el nuevo propietario no abandone al robot y que viva por mucho tiempo (tanto el propietario como el robot). De lo contrario, el destino de la plataforma se enterrará debajo de un manzano para saturar el suelo con hierro. Esto, por supuesto, es un beneficio definitivo para el manzano, pero no el propósito directo del robot creado.
En cuanto al nombre "NanoBot", entonces todo es bastante simple. Probablemente, muchas personas recuerdan una gran cantidad de publicidad (en la caja zombie), en la que había un prefijo tan popular "nano" que decidí agregar este prefijo al nombre de mi robot, especialmente porque describía completamente sus parámetros físicos.