En la Universidad ITMO, sobre la base del Departamento de Sistemas de Control e Informática (SUII), se ha abierto un laboratorio de robótica. Hablaremos sobre los proyectos en los que se está trabajando dentro de sus paredes y mostraremos las herramientas: manipuladores robóticos industriales, dispositivos de agarre robóticos, así como una instalación para probar sistemas de posicionamiento dinámico utilizando un modelo robótico de un recipiente de superficie.

Especializacion
El Laboratorio de Robótica pertenece al departamento más antiguo de la Universidad ITMO, que se llama "Sistemas de Control y Ciencias de la Computación". Ella apareció en 1945. El laboratorio en sí se lanzó en 1955, luego se ocupó de problemas de automatización de mediciones y cálculo de parámetros de buques de superficie. Más tarde, se amplió el rango de direcciones: cibernética adicional, CAD, así como robótica.
Hoy, los laboratorios se dedican a mejorar los robots industriales. Los empleados resuelven problemas relacionados con las interacciones hombre-máquina: desarrollan algoritmos de control seguros con el control de la fuerza del robot y también trabajan en robots colaborativos que pueden realizar tareas al lado de las personas.
El laboratorio también desarrolla métodos alternativos para el control remoto de grupos de robots y crea algoritmos de software que pueden reconfigurarse para realizar nuevas tareas en línea.
Proyectos
Se han adquirido varios sistemas robóticos de laboratorio de grandes empresas y están destinados a fines industriales o de investigación. Parte del equipo fue fabricado por empleados como parte de la investigación y el desarrollo.
De esta última, se puede distinguir la
plataforma robótica Stuart con dos grados de libertad. La instalación académica está diseñada para probar algoritmos de control para mantener la pelota en el centro del sitio (puede ver el sistema en acción en
este video ).
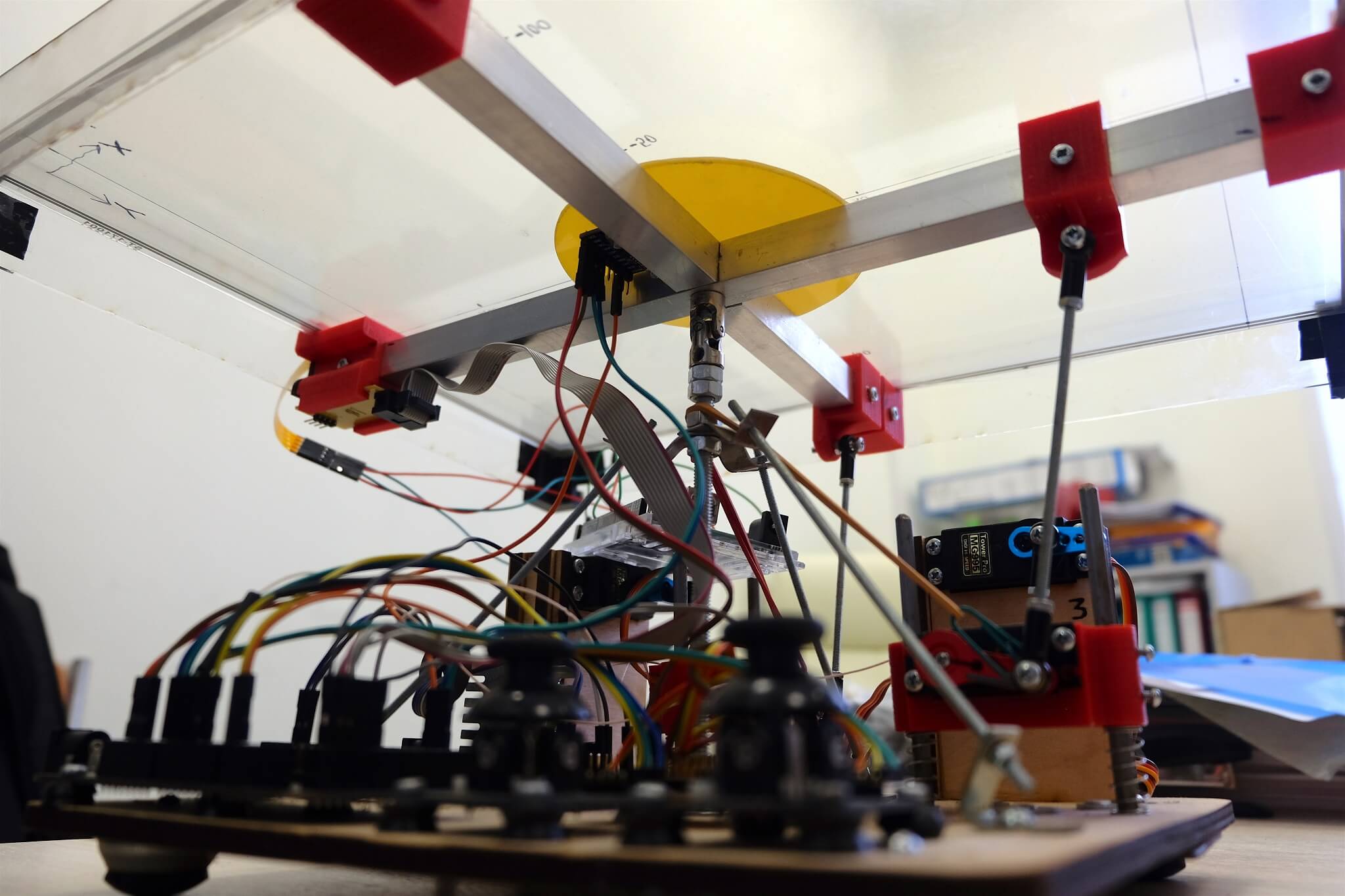
El complejo robótico consiste en una plataforma rectangular con un sustrato sensor resistivo que determina las coordenadas de la pelota. Los ejes de transmisión se unen mediante una articulación giratoria. Estas unidades cambian el ángulo de la plataforma de acuerdo con las señales de control recibidas de la computadora a través de USB, y no permiten que la bola ruede.
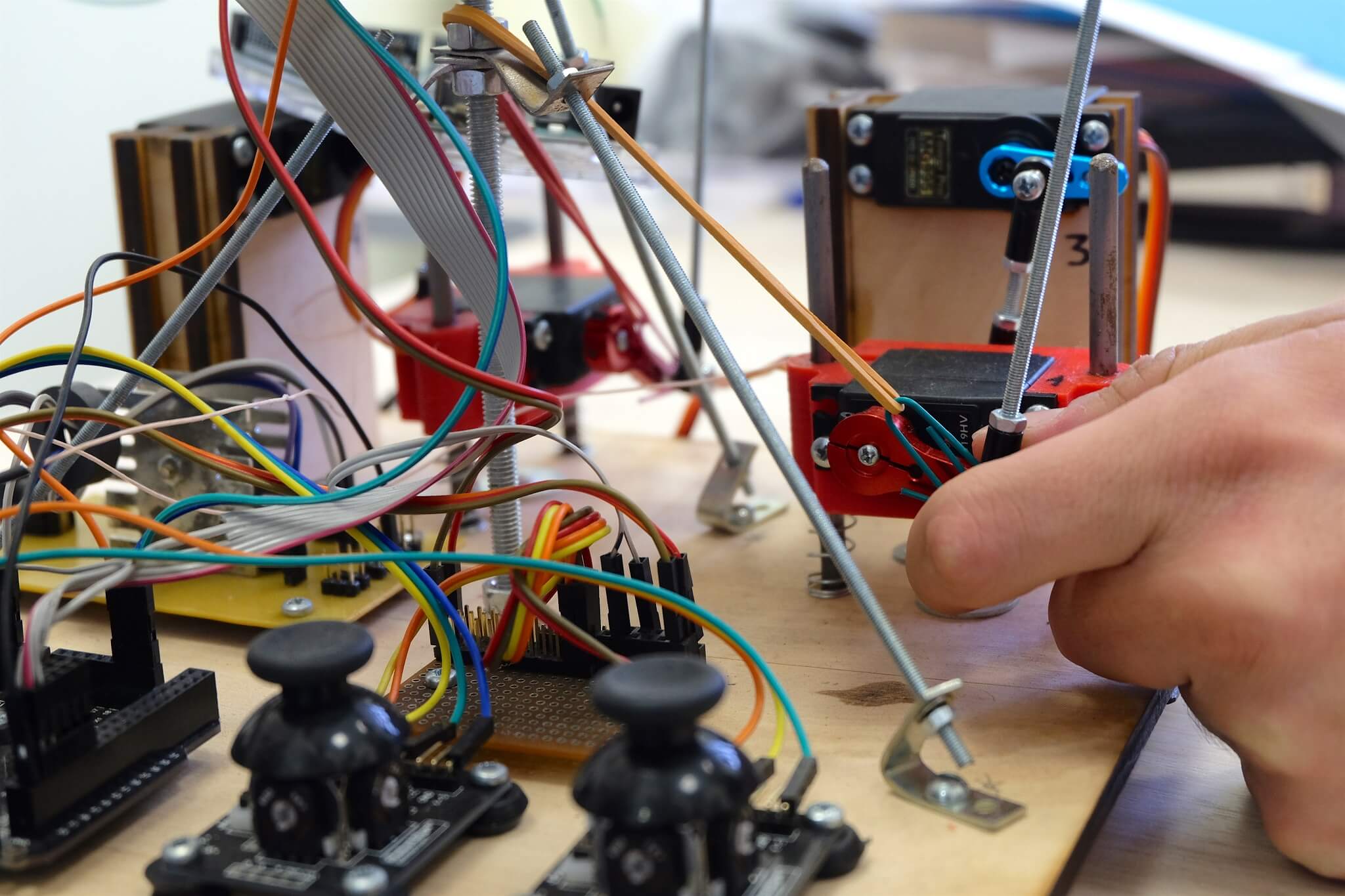
El complejo tiene servos adicionales que son responsables de compensar las perturbaciones. Para el funcionamiento de estas unidades, el personal del laboratorio desarrolló algoritmos especiales que "suavizan" diversos tipos de interferencia, como la vibración o el viento.
Además, en el parque de robots del laboratorio, hay un
centro de investigación
KUKA youBot , que es un brazo robótico de cinco enlaces montado en una plataforma móvil con ruedas omnidireccionales.

KUKA youBot probó algoritmos de
control adaptativo para rastrear un objetivo en movimiento . Utilizan un sistema de visión basado en una cámara digital y procedimientos de procesamiento de video. La base de este proyecto es la investigación en el campo del control adaptativo de sistemas no lineales, realizada por personal de laboratorio.
Los algoritmos de control se utilizan para compensar las influencias externas que actúan sobre los enlaces del robot. Como resultado, la máquina puede sostener la herramienta de trabajo en un punto fijo en el espacio y moverla de manera estable a lo largo de una trayectoria determinada.
Un ejemplo de un proyecto implementado sobre la base del robot KUKA youBot es una
sensación de momento de fuerza sin sensor . Junto con la compañía británica TRA Robotics, desarrollamos un algoritmo que nos permite evaluar la fuerza de la interacción de la herramienta de trabajo con el medio ambiente sin sensores de torque caros. Esto permitió al robot realizar operaciones más complejas sin recurrir a sistemas externos.

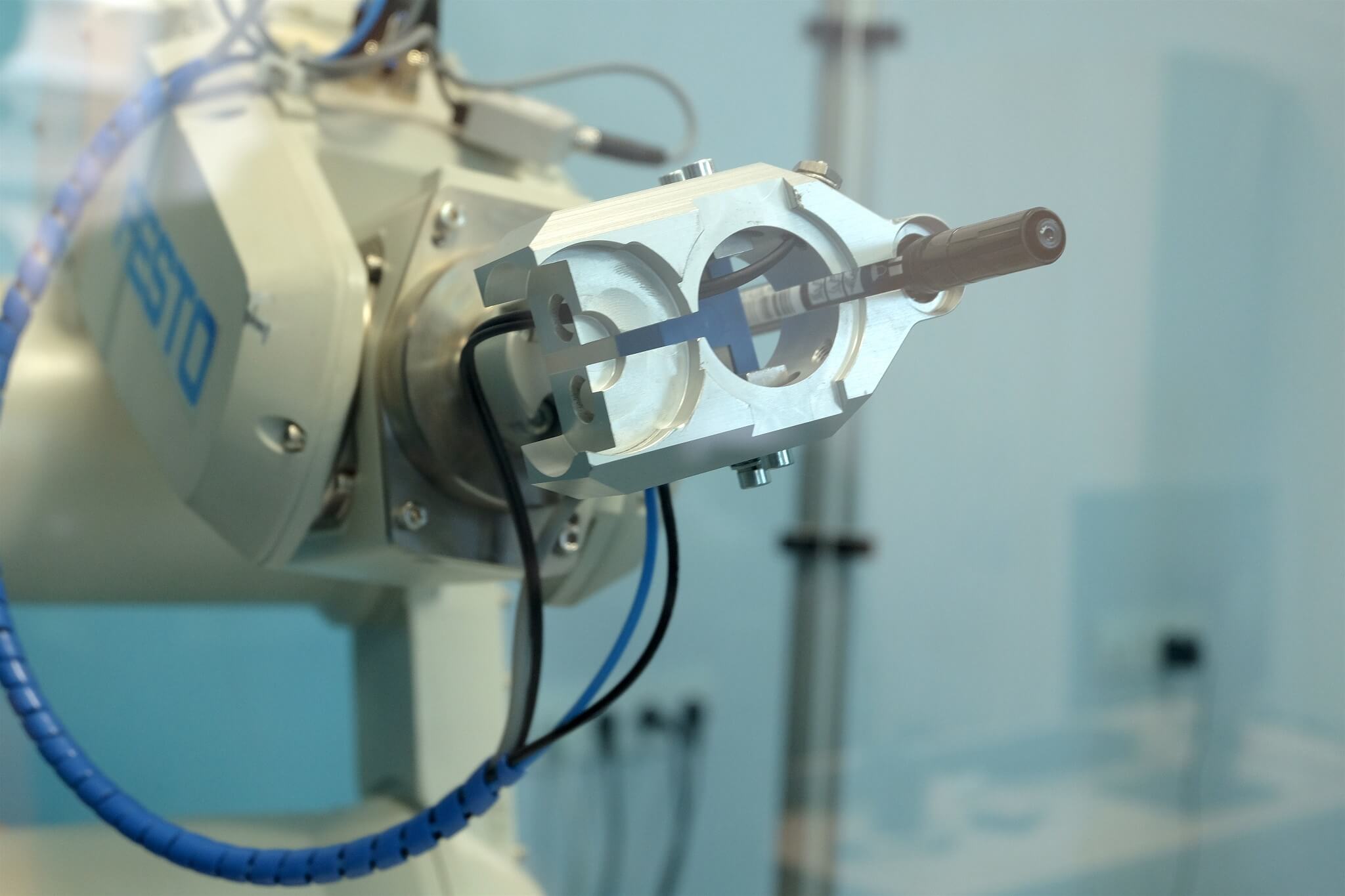
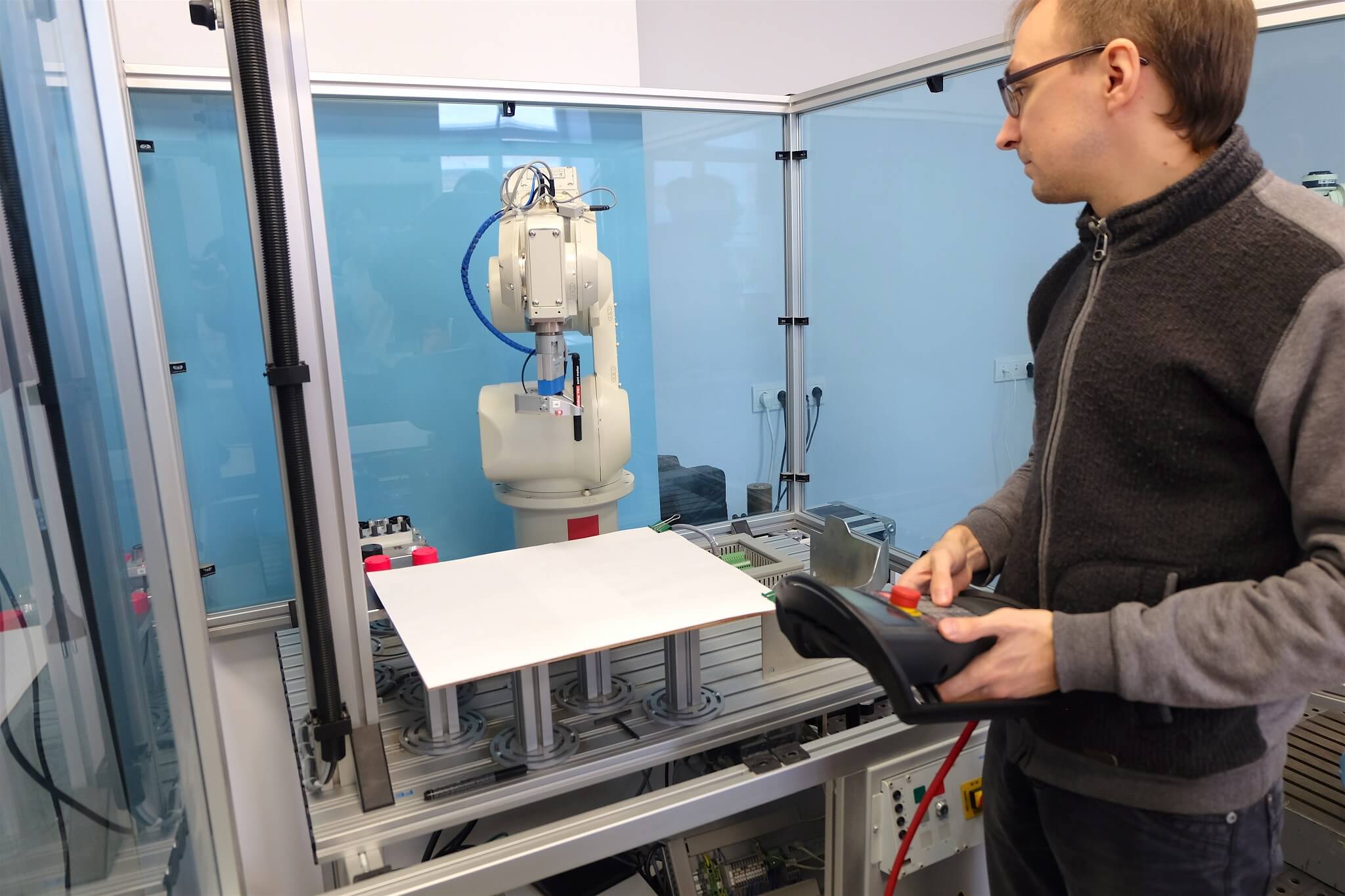
Otro ejemplo de una instalación robótica en un laboratorio es la
FESTO Robot Vision Cell . Este complejo se utiliza para
simular operaciones tecnológicas en la producción, como la soldadura. Para implementar este escenario, se plantea la tarea de planificación de movimiento: una herramienta de soldadura de simulación evita el contorno de una pieza metálica.
Además, la celda está equipada con un sistema de visión y es capaz de resolver las tareas de clasificación de piezas por color o forma.
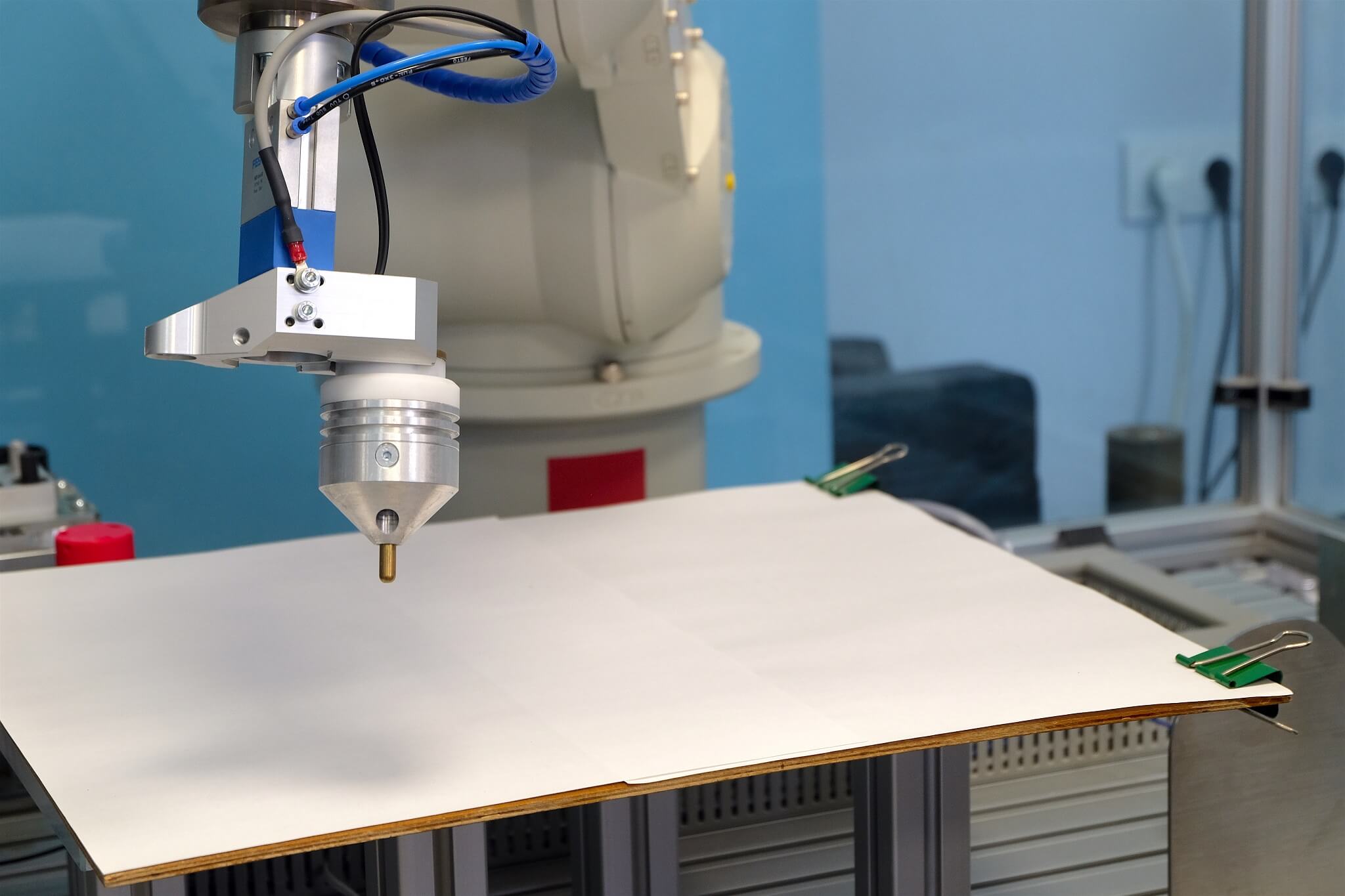
El proyecto, basado en la célula robótica FESTO Robot Vision Cell con el robot industrial Mitsubishi RV-3SDB, resuelve las tareas de planificación del movimiento.
Ayuda a simplificar el proceso de interacción del operador con el controlador del robot al programar rutas complejas. La idea es programar automáticamente los movimientos de la herramienta del robot utilizando los contornos que se muestran en el mapa de bits. Es suficiente cargar un archivo en el sistema, y el algoritmo organizará de forma independiente los puntos de referencia necesarios y compilará el código del programa.
En la práctica, la solución resultante se puede usar para grabar o dibujar.
Tenemos un
video en el canal en el que nuestro "artista robot" representaba un retrato de A. S. Pushkin. Además, la tecnología se puede utilizar para soldar piezas de forma compleja. De hecho, es un complejo robótico que resuelve problemas industriales en condiciones de laboratorio.
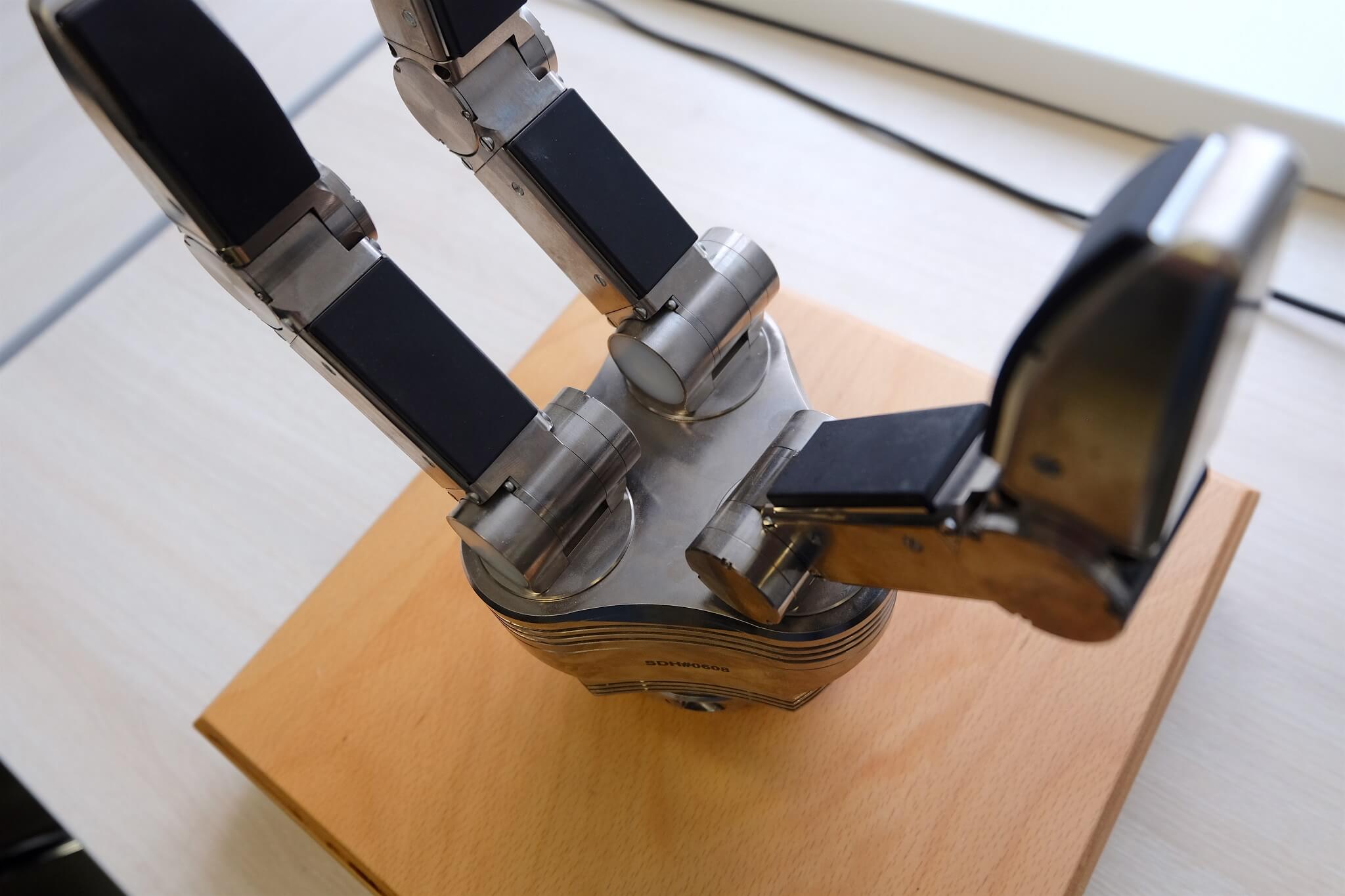
El laboratorio también tiene una pinza de tres dedos equipada con sensores de presión ubicados en la superficie interna de los dedos.
Tal dispositivo permite el manejo de objetos frágiles cuando es importante controlar con precisión la fuerza de agarre para evitar daños.
El laboratorio tiene un
modelo robótico de un recipiente de superficie , que está diseñado para probar sistemas de posicionamiento dinámico.
El modelo está equipado con varias unidades ejecutivas, así como hardware de comunicación por radio para transmitir señales de control.

Hay una piscina en la sala de laboratorio, en la que se verifica la operatividad de los algoritmos de control
para mantener la posición de un modelo pequeño de un recipiente de superficie con compensación de desplazamientos longitudinales y transversales.
Actualmente, se planea organizar un grupo grande para pruebas a gran escala con escenarios complicados.

Trabaja con socios y planes
Uno de nuestros socios es la empresa británica TRA Robotics. Juntos estamos
trabajando para mejorar los algoritmos de control de robots industriales para una empresa de fabricación digital. En dicha empresa, todo el ciclo de producción: desde el desarrollo hasta la fabricación de productos industriales, será realizado por robots y sistemas de inteligencia artificial.
Otros socios incluyen la preocupación Elektropribor, junto con la cual estamos
desarrollando sistemas mecatrónicos y robóticos. Nuestros estudiantes ayudan a la preocupación en el campo de la instrumentación, desarrollo de software y tareas de producción.
También
cooperamos con General Motors,
desarrollamos robótica con InfoWatch. Además, el personal del laboratorio interactúa estrechamente con la empresa
Navis JSC , que implementa proyectos para el desarrollo de sistemas de posicionamiento dinámico para buques de superficie.
El
Laboratorio de Robótica Juvenil funciona sobre la base de la Universidad ITMO, donde los escolares se preparan para competiciones de clase mundial. Por ejemplo, en 2017, nuestro equipo
ganó la Olimpiada Mundial de Robots en Costa Rica, y en el verano de 2018, nuestros estudiantes
obtuvieron dos premios en la Olimpiada de toda Rusia para escolares.
Planeamos atraer a más socios de la industria y educar a la generación más joven de científicos rusos. Tal vez desarrollarán tales robots que complementan orgánicamente el mundo de las personas y realizarán tareas más rutinarias y peligrosas en las empresas.
Recorridos fotográficos de otros laboratorios en la Universidad ITMO: