Hola, queridos participantes e invitados del sitio. Trataré de ser lo más breve posible en este tema. El auge de la robótica en los últimos años, mucha atención a este tema no podría dejarme indiferente.
Persiguiendo el sueño de la infancia de hacer un robot, llegué al foro
cyber-place.ru en busca de información hace aproximadamente un año (no lo considero para publicidad). En mis fantasías más salvajes, pensé en crear mi propio robot de telepresencia, con la capacidad de moverme en el espacio, video y comunicación de audio bidireccional, con control remoto por teléfono o computadora. Me inspiró el modelo basado en el enrutador tplink 3020 con firmware Cyberwrt. La falta de conocimiento del tema y las grandes brechas en la educación no interfirieron con mi deseo maníaco de lograr un resultado, como resultado de la prueba y error y la electrónica quemada.
Después de casi un año de "aprender de mis errores", aparecieron los primeros resultados, una máquina con la capacidad de controlar a través de Internet basada en Cyberbot -3, por lo que muchas gracias a sus desarrolladores, ¡los muchachos hicieron un gran trabajo! (Para mí, ¡programar y crear software es solo espacio!) Muchas personas hicieron la máquina de escribir, el equipo y las instrucciones detalladas se encuentran en las vastas extensiones de Internet. Por lo tanto, para detenerme en esto no veo razón.

Además, surgió la necesidad de la autonomía del dispositivo, construyó (por medios improvisados) una "estación de carga" y aseguró contactos accionados por resorte frente al robot. La potencia principal del robot se selecciona 4.2V para la posibilidad de cargar desde una fuente de alimentación de 5V. Para aumentar la corriente de carga, se soldaron dos módulos TP4056 en paralelo. Gestioné toda esta economía a través de Internet por teléfono, a través de un navegador.


Después de haber jugado lo suficiente con el modelo que decidí, necesito seguir adelante. Desafortunadamente, no encontré una manera (creo que todo aún está por delante) para administrar el dispositivo basado en uno, el controlador principal.
Dado que este equipo no permite la comunicación de audio bidireccional, no pude encontrar una mejor manera de usar la cámara CCTV DS-2CD2432F-IW, esta cámara con el soporte de un software de terceros en Android (tinyCam PRO) permite el monitoreo de video y audio bidireccional. Inicialmente, había una idea (loca) de conectarse al conector de ingeniería de la cámara para leer uart, usar el software estándar de la cámara para controlar el movimiento del carro robótico. Use cámaras PTZ para moverse. Planeé considerar qué equipos están acostados sobre uart cuando presiono hacia la izquierda, derecha, abajo, arriba por una cámara que no es giratoria, luego dirijo estos comandos a uart arduino nano, que se suponía que controlaba los motores, así que quería resolver el problema principal por mí mismo, no escribir software La idea no tuvo éxito, el fabricante bloqueó estos comandos, excepto por el mensaje "ptz no es compatible" cuando hace clic en los botones PTZ en uart nada salió.
Por lo tanto, la "cámara sobre ruedas" y no el robot de telepresencia fue el resultado de mis esfuerzos.
Para controlar el dispositivo desde el teléfono, uso la capacidad de abrir varias aplicaciones en Android, las llamadas "ventanas flotantes" (en versiones posteriores funciona sin aplicaciones de terceros, como aplicaciones flotantes). Debe abrir dos aplicaciones, tinyCam PRO para acceder a la interfaz de la cámara y un navegador para acceder al control del carrito.
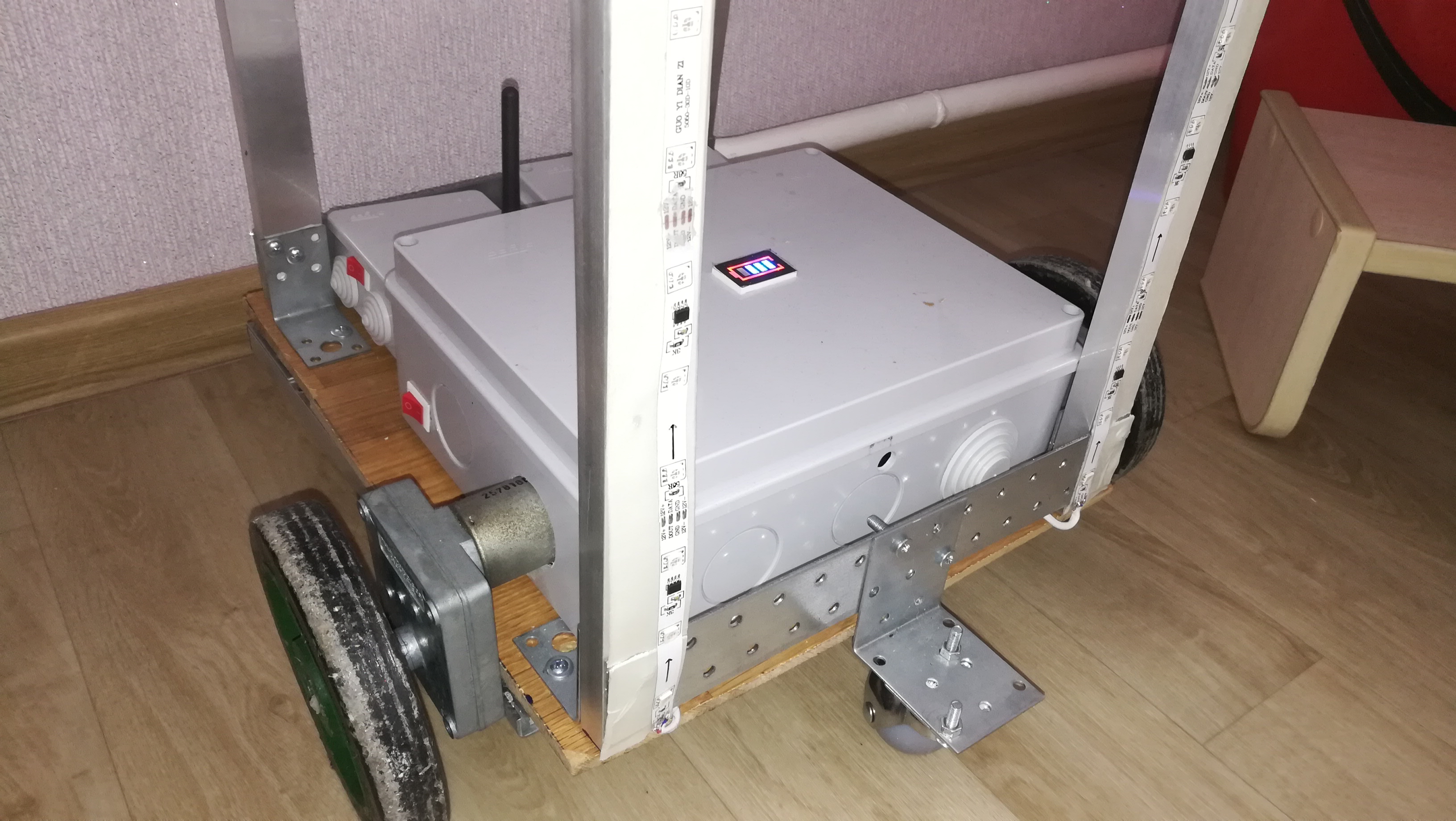
Entonces, el resultado: una caja de conexiones eléctricas como una caja para alojar equipos tp link 3020 con firmware CyberWRT, una antena soldada, + 10dB en mi caso, un arduino nano que recibe comandos uart desde la interfaz web del enrutador, un escudo de motor monstruo para controlar cajas de engranajes de motor potentes retiradas de máquinas tragamonedas antiguas.

La altura del robot es de 165 cm, el peso es de aproximadamente 10 kg, la potencia es de 12,6 V (conjunto de litio 18650 + controlador de carga con un equilibrador), una lata de mayonesa en lugar de la cabeza en la que está oculta la cámara, el altavoz de tiempo completo de la cámara se reemplaza con un altavoz de 5 vatios para que pueda escuchar mejor . Ojos: dos LED insertados en los reflectores desde debajo de las luces, los ojos se controlan desde la interfaz del cyberbot, dos tiras de LED de dirección y un mini controlador arduino pro adicional para controlarlos (gracias a Alex Guyver, su proyecto "lámpara de fuego" se rasgó).
La cinta se controla a través del módulo de retransmisión, por comando, también a través de la interfaz de cyberbot.
La apariencia incómoda se debe al hecho de que el robot se vistió y felicitó a sus colegas el 8 de marzo. (El robot salió a la música desde el terminador, controlado por mí desde un lugar apartado, se confundió con la música ligera y la inclusión suave de LED, la audiencia estaba encantada).


En el futuro planeo dominar el trabajo con el manipulador, eliminar todo lo "innecesario", seleccionar el equipo necesario (reemplazar el enrutador y el arduino con ESP32) y el software para que incluso mi abuela pueda manejar el "diseño" :)) El tema no se reveló completamente, no cubrí muchos puntos para no retrasar la larga publicación, si te gustó el tema, espero tus críticas y consejos.