
El rover lunar Yutu-2 condujo 43 metros en el tercer día lunar, agregándolos a los 44 (44.185) metros pasados en el primer día lunar y a 76 metros (75.815) en el segundo día lunar. Total cubierto 163 metros en tres días lunares. ¿Es mucho o poco? ¿Y por qué es tan corta la distancia que recorre el rover lunar en esta misión?
Materiales publicados anteriormente sobre la misión Chang'e-4: El tercer día lunar para la misión Chang'e-4 es el período del 27 de febrero de 2019 al 13 de marzo de 2019:
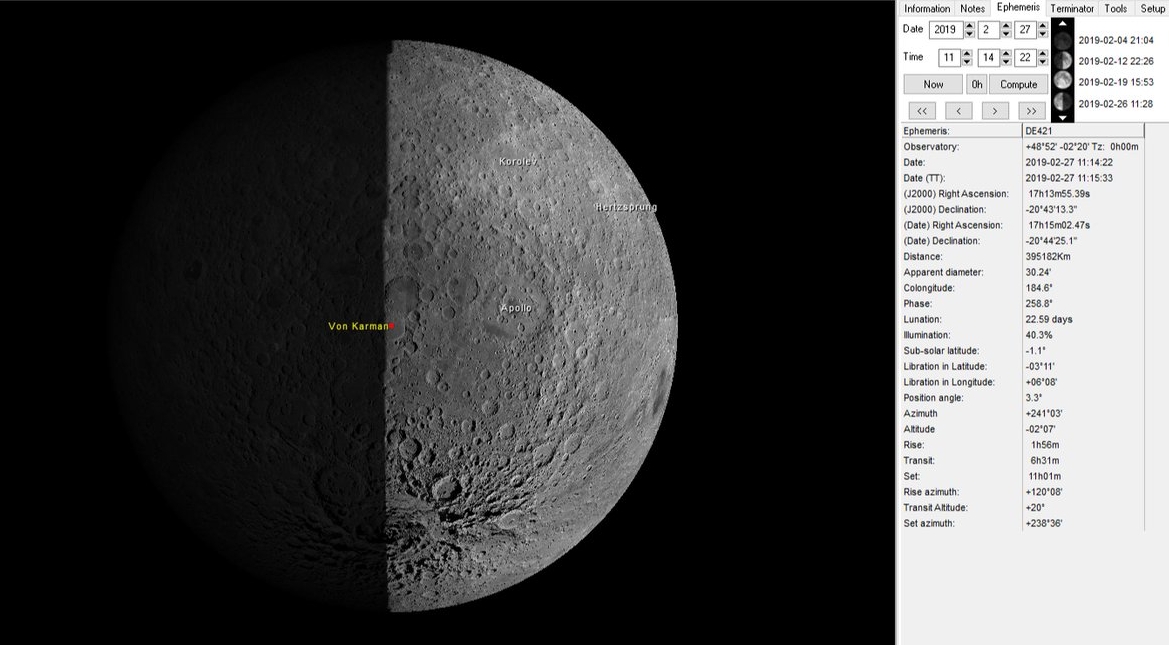
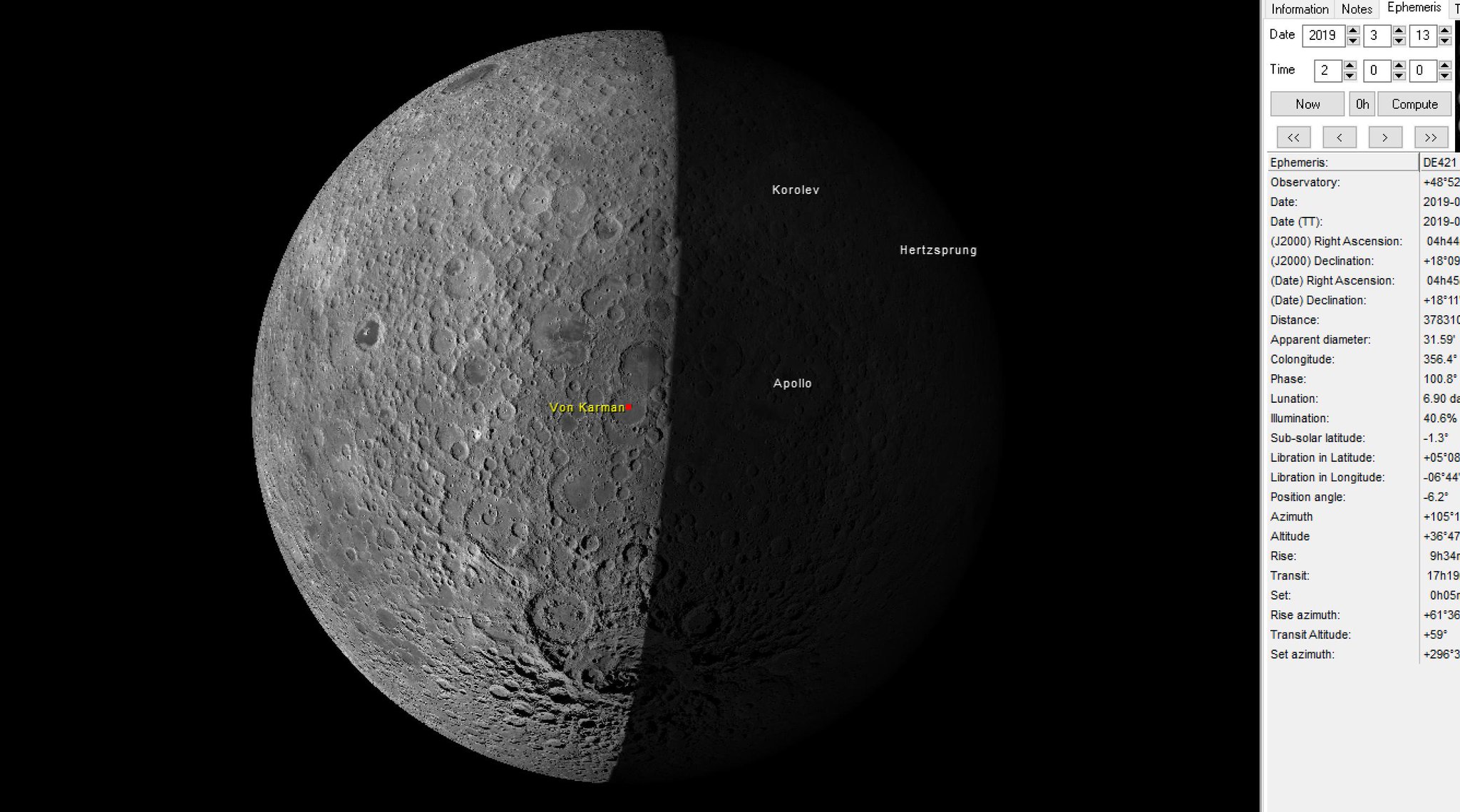
Desde el 13 de marzo de 2019, el equipo del módulo de aterrizaje Chang'e-4 y el rover Yutu-2 se han dormido hasta el final de la tercera noche lunar para sobrevivir al período de ambiente de temperatura extremadamente baja en el otro lado de la luna.
¿Cuál es la superficie al otro lado de la luna?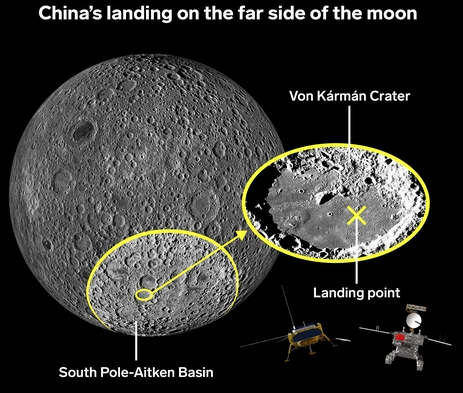
Dado que el reverso de la luna también tiene un relieve más complejo que el lado visible desde la Tierra, en el proceso de moverse a lo largo de la superficie, el rover Yutu-2 encontró problemas motores e interferencias más serios, en comparación con los encontrados previamente por su predecesor, el rover Yutu ", enviado a la superficie lunar en 2013.
Desafortunadamente, el primer rover Yutu de la misión Chang'e-3, el 25 de enero de 2014, fue inmovilizado técnicamente (daños a los elementos como resultado de una colisión) después de superar 114.8 metros en una superficie lunar compleja.
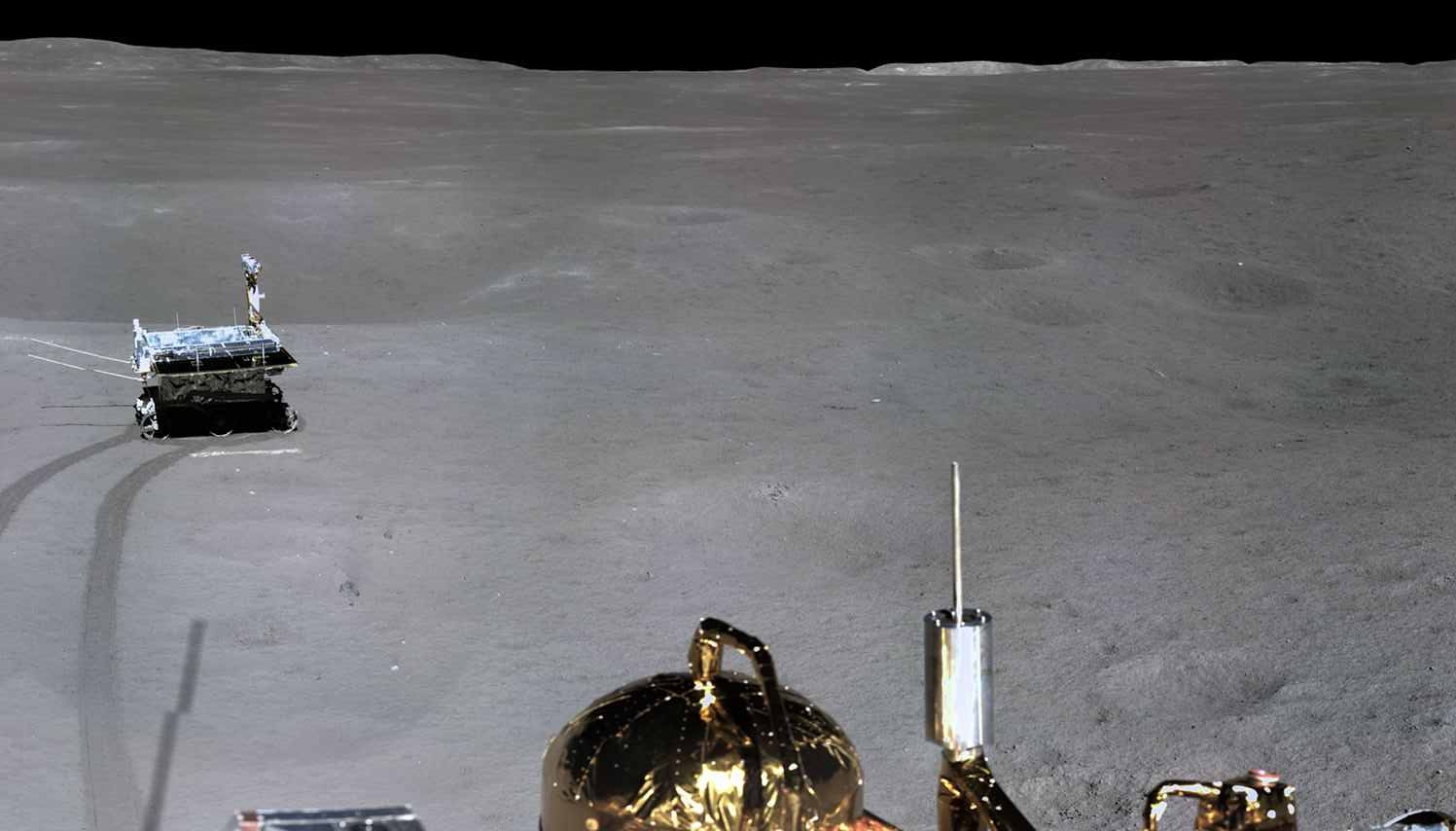
La superficie lunar en la zona de aterrizaje del módulo de aterrizaje Chang'e-4 está repleta de pliegues, numerosos guijarros y pequeños cráteres, después de realizar cada uno de sus pequeños movimientos, el rover Yutu-2 debería detenerse, fotografiar la superficie y enviar estos datos a la Tierra por satélite. repetidor
Los científicos, operadores en el CCM e ingenieros en la Tierra luego procesan estos datos y trazan una ruta adicional a lo largo de la cual seguirá el rover Yutu-2.
Las antenas móviles Yutu-2 deben configurarse de modo que apunten a un satélite repetidor para enviar y recibir correctamente señales de control, mientras que los paneles solares del móvil deben estar inclinados de manera óptima para recibir una gran cantidad de luz solar para maximizar la salida electricidad en el momento de la transferencia de datos.
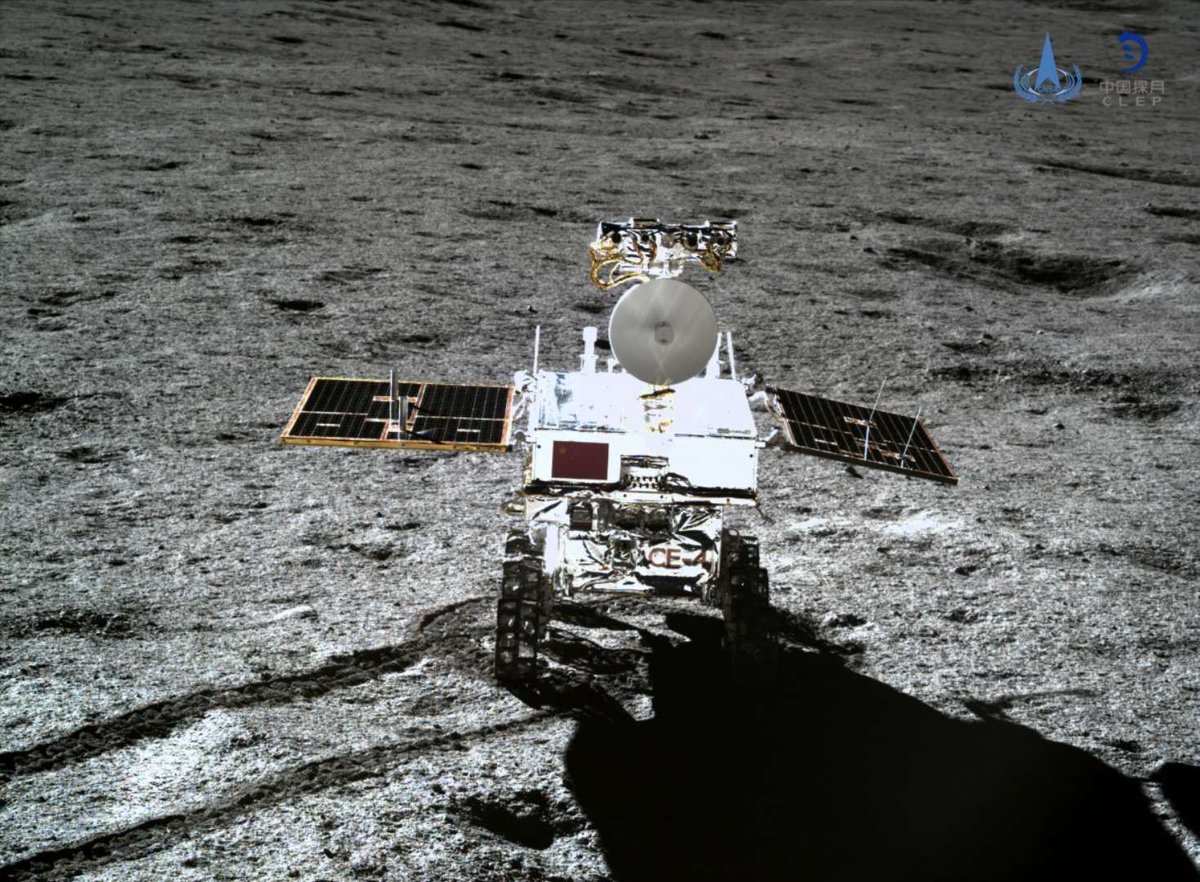
 Rover de seis ruedas "Yutu-2":
Rover de seis ruedas "Yutu-2":- La masa total del rover es de aproximadamente 140 kg (310 libras);
- capacidad de carga - aproximadamente 20 kg (44 lbs);
- puede moverse a lo largo de pendientes y tiene sensores automáticos que evitan la colisión con otros objetos;
- el rover recibe electricidad mediante dos paneles solares, lo que permite que el rover funcione durante un día lunar;
- la velocidad máxima de 200 metros por hora (aún no se puede alcanzar esta velocidad en la Luna, ya que los elementos en la superficie no permitirán acelerar ni desactivar el vehículo antes);
- área máxima de investigación - 3 metros cuadrados. km;
- Tiempo de trabajo estimado: 3 meses (2160 horas);
- La distancia máxima estimada es de 10 km.
En este momento, han pasado 70 días (1680 horas) desde que el rover Yutu-2 aterrizó en la superficie lunar y 97 días (2328 horas) después de que el rover Yutu-2 se lanzó desde el cosmodromo de Sichan como parte de la misión Chang'e-4 a la Luna.
De hecho, el rover Yutu-2 ya ha calculado su vida útil estimada, pero en caso de un "despertar" exitoso después de dormir el 27 de marzo de 2019, está previsto que continúe realizando investigaciones de superficie en su cuarto día lunar.
Pero cuánto es suficiente su capacidad en términos de capacidad de trabajo ya está más allá de la norma de diseño y comenzarán los problemas o fallas en los componentes y sistemas, ya que las grandes caídas de temperatura, la radiación, la contaminación y otros factores externos lunares afectarán sus características cada vez más.
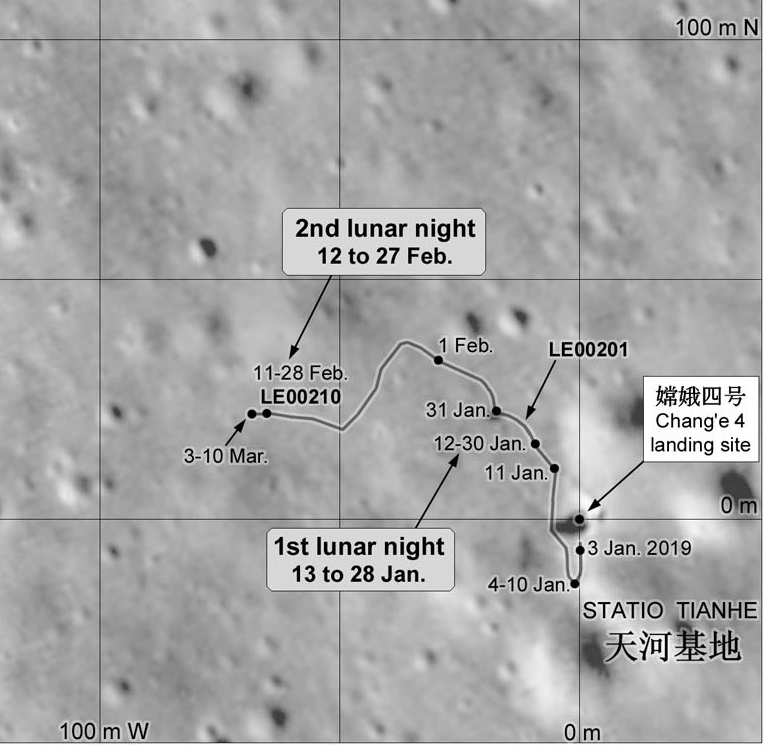
La trayectoria del rover "Yutu-2" en el primer día lunar y parte del segundo día lunar:
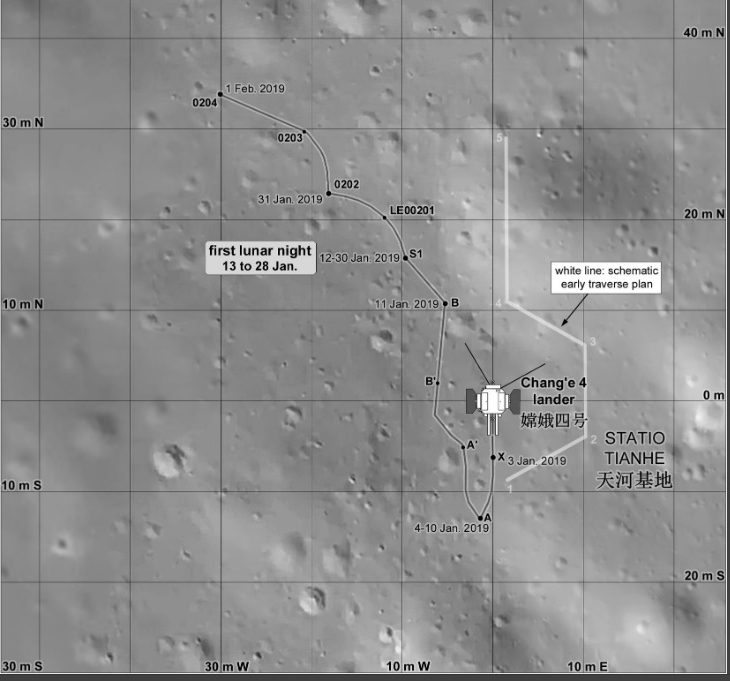
Puede consultar la foto del lugar de aterrizaje, que hizo que la sonda LRO de la NASA desde una altura de 82 kilómetros, una resolución de 0,85 metros (33 pulgadas) por 1 píxel:

Por el momento, el rover Yutu-2 se encuentra a más de 80 metros en diagonal del módulo de aterrizaje Chang'e-4 y ha recorrido 163 metros después del aterrizaje.
 ¿Por qué el rover Yutu-2 conducía tan poco?
¿Por qué el rover Yutu-2 conducía tan poco?En primer lugar, es un "miedo" a inmovilizar el rover Yuta-2 (y no repetir el destino del primer rover Yuta), por lo tanto, el rover Yuta-2 debe moverse alrededor de la superficie de la Luna, evitando cuidadosamente los obstáculos. Cada centímetro de su movimiento debe hacerse con cuidado y correctamente. En el CCM de la misión Chang'e-4, intentan evitar una situación en la que el rover Yutu-2 se da vuelta, lo que significa que no podrá volver a su posición de trabajo nuevamente. Los paneles solares a los lados del rover lunar Yutu-2 son muy frágiles, pueden romperse o volverse polvorientos después de caerse, lo que los hará inutilizables.
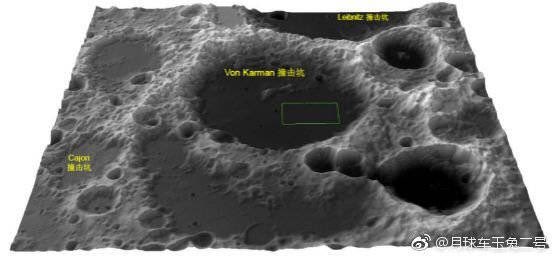
En segundo lugar, es más probable que el lado lejano de la Luna caiga en meteoritos, por lo tanto, el terreno allí es muy complicado, en la superficie lunar en la zona de aterrizaje hay muchos pequeños cráteres e indentaciones que deben rodearse lo más lejos posible, pero aún deben moverse en busca de los que necesita estudiar. elementos superficiales - grandes piedras y formaciones. Y su búsqueda e investigación de diferentes formaciones también son paradas forzadas necesarias para realizar investigaciones en un solo lugar con un tiempo de parada prolongado.
Por lo tanto, en el primer y segundo día lunar, utilizando los datos de las cámaras a bordo del rover Yutu-2, también se finalizó un mapa detallado del área del sitio de aterrizaje y la posible ruta adicional del rover, que resultó ser mucho más sinuosa que la ruta directa previamente planificada.
En el tercer día lunar, el rover Yutu-2 llegó a un lugar con formaciones interesantes en la superficie lunar: picos agudos en la superficie, piedras separadas medianas y grandes.
Los elementos del terreno en la parte posterior de la superficie lunar pueden ser más antiguos que los del lado visible, por lo que estudiar el suelo y las rocas en la parte posterior puede arrojar más luz sobre el origen y la evolución de la luna.
¿Quién controla el rover Yutu-2?La telemetría, los datos de las cámaras y el equipo científico, los equipos de control y el monitoreo continuo de los parámetros del rover Yutu-2 son prerrogativa de los ingenieros del centro de control aeroespacial de la Academia China de Tecnología Espacial.
En China, la luna se asocia tradicionalmente con las mujeres, el programa de exploración de la luna china también lleva el nombre de la diosa de la luna Chang'e, que enfatiza la contribución de las mujeres científicas e ingenieras al desarrollo de la investigación espacial.
En una leyenda china, una niña llamada Changye voló a la luna y se convirtió en una diosa allí, pero no puede regresar a la Tierra para reunirse con su esposo.
Las ingenieras del centro de control aeroespacial de la Academia China de Tecnología Espacial son más afortunadas: muchas de ellas tienen la oportunidad de volar "virtualmente" a la luna y estar simultáneamente en la Tierra con sus seres queridos.
Resulta que las mujeres del equipo de ingeniería para administrar y controlar el rover Yutu-2 tienen un mayor sentido de responsabilidad y perseverancia que muchos de sus colegas masculinos, son más exigentes y observadores de los detalles más pequeños en el proceso de trabajo con el rover Yutu-2. . Por lo tanto, entre el grupo de ingenieros-operadores del rover "Yutu-2", pueden mostrar los máximos talentos científicos y de ingeniería en su trabajo.
Verificación de datos de telemetría con un colega:

Rover operador de lugar de trabajo "Yutu-2":

Y ahora de vuelta al rover Yut-2.
Hace más de tres mil millones de años, la parte posterior de la luna fue bombardeada por grandes asteroides y meteoritos, lo que causó un cambio global en su superficie, los rastros de este proceso están siendo estudiados por el rover Yutu-2.
Las cámaras de a bordo del rover Yutu-2 son estacionarias, para obtener las imágenes necesarias, es necesario realizar movimientos precisos y ajustar la posición horizontal, así como la compensación del ángulo de inclinación del rover, lo que lleva mucho tiempo para los operadores en el MCC. Después de todo, la superficie en la zona de aterrizaje del rover Yutu-2 está llena de cráteres de diferentes tamaños, lo que hace que sea muy difícil moverse con seguridad.
Resulta que el rover Yutu-2 puede sortear automáticamente algunos obstáculos, si hay una gran piedra o cráter frente a él, puede detenerse solo y planificar una nueva ruta para evitar este lugar, en este caso el operador en el MCC puede registrar esta situación y reconstruir lo planeado. ruta a una nueva.
El rover Yutu-2 también puede subir pequeñas pendientes y cruzar una superficie rocosa. Pero el frente principal de su trabajo es el movimiento en una superficie horizontal plana y suelo lunar.
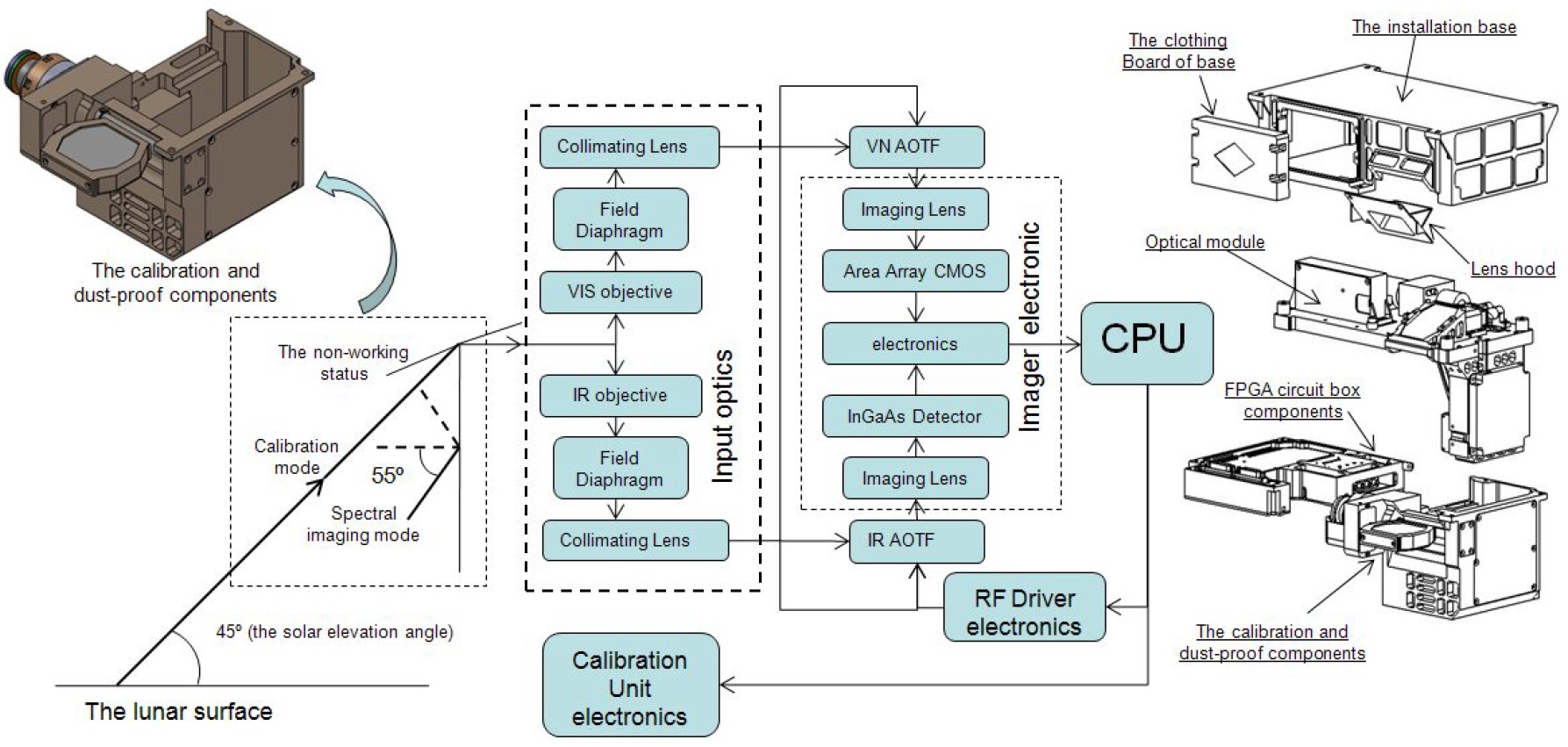
Entonces, ¿qué tipo de dispositivo está instalado este "espectrómetro VNIS" a bordo del rover Yutu-2?El espectrómetro de infrarrojos lunares VNIS (El espectrómetro de imágenes visibles e infrarrojas cercanas) se desarrolló en el Instituto de Física Técnica de Shanghai de la Academia de Ciencias de China.
El espectrómetro utiliza filtros ajustables acústico-ópticos no colineales, consta de un espectrómetro de video VIS / NIR (0.45–0.95 μm) y un espectrómetro infrarrojo de onda corta (0.9–2.4 μm), y también incluye una unidad de calibración con protección del polvo y la polución.
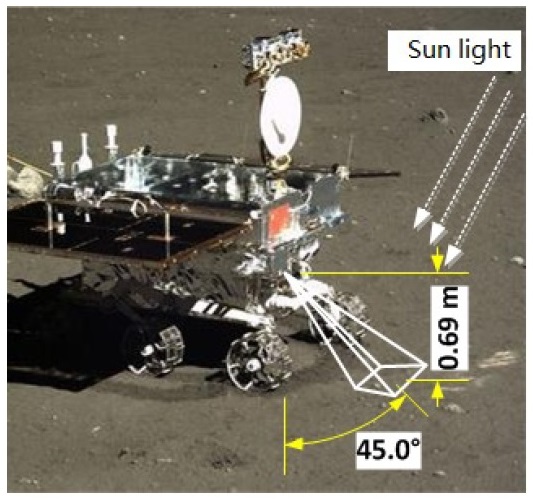
El espectrómetro se instala en la parte delantera a bordo del rover Yutu-2, tiene las siguientes restricciones para posicionar y trabajar con material lunar:
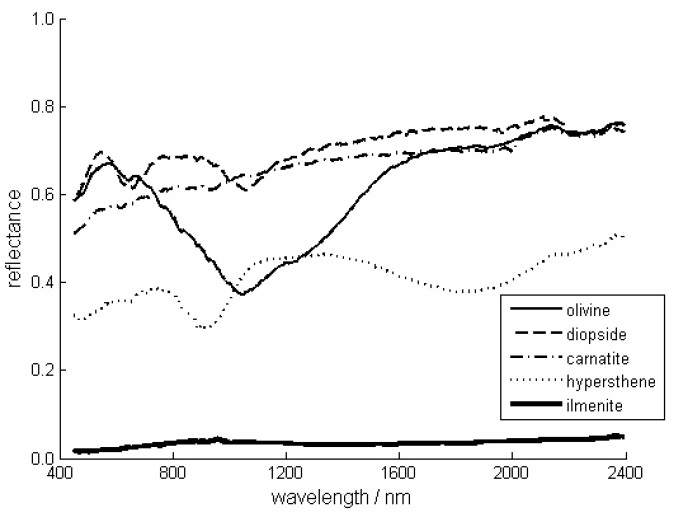
Los minerales, como piroxeno, plagioclasa, olivina e ilmenita, que constituyen la mayoría de las rocas de la superficie lunar, tienen características espectrales distintivas:
El diagrama estructural del espectrómetro:
Las principales características técnicas del espectrómetro:

Apariencia del espectrómetro:

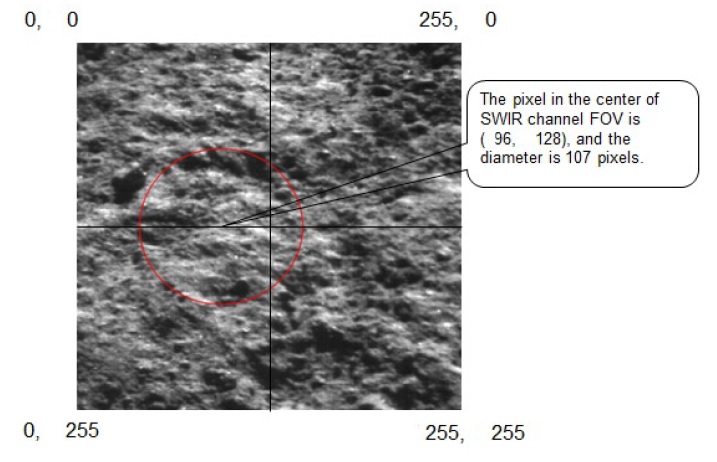
Las dimensiones geométricas de la ventana de detección:
Datos obtenidos por espectrómetro:
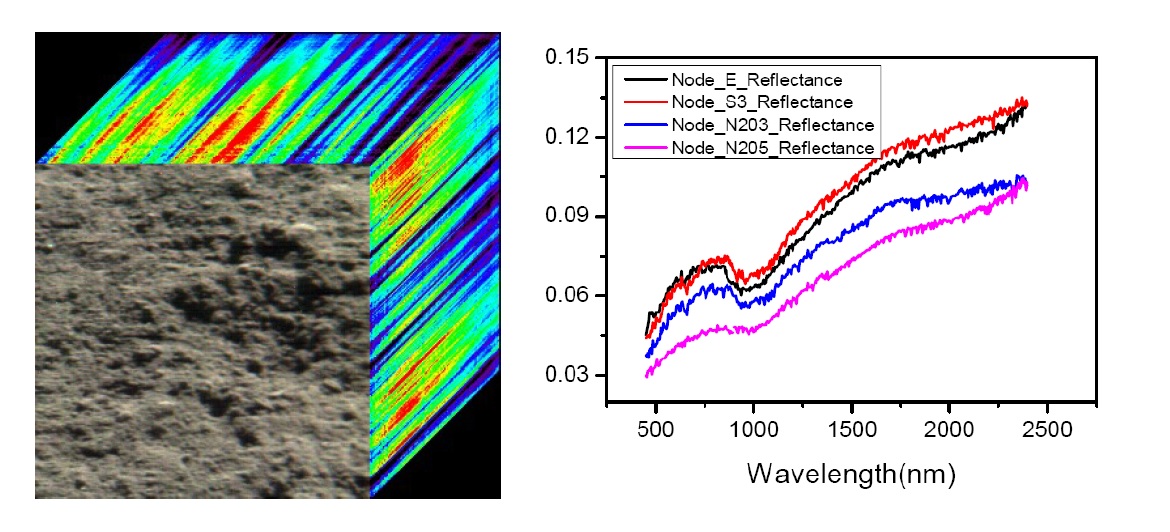
En el tercer día lunar, el rover Yutu-2 se ocupó de obtener datos científicos utilizando el espectrómetro estacionario a bordo VNIS (Espectrómetro de Imágenes Visibles e Infrarrojas Cercanas), cuyo campo de visión del sensor es de solo unos centímetros, por lo tanto, es necesario posicionar con precisión el rover " Yut-2 "para que el" ojo "del espectrómetro pueda llevarse al área deseada de la superficie lunar para recibir los datos correctos desde la distancia óptima.
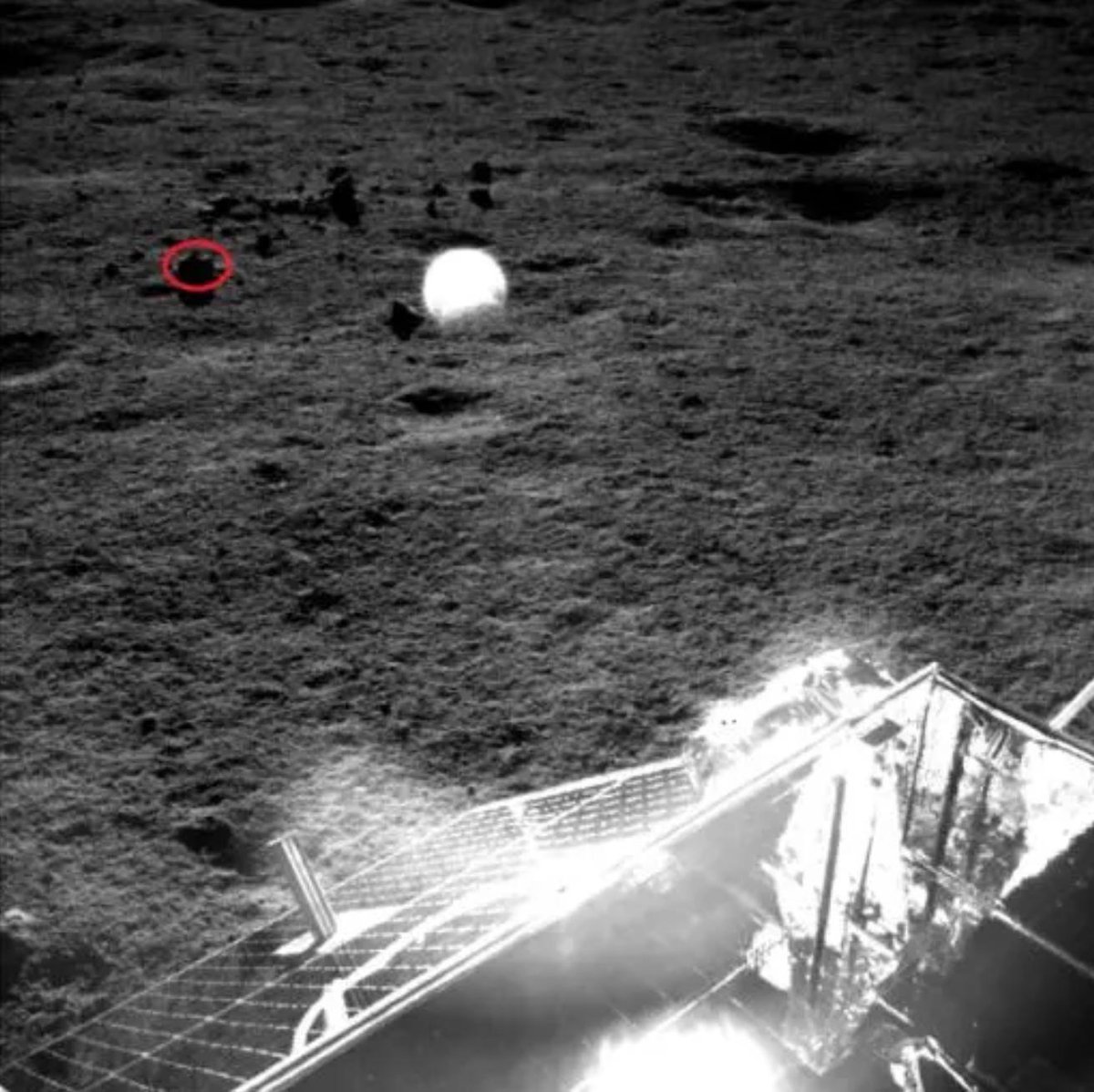
Después de una corta caminata en la luna, el rover Yut-2 alcanzó un interesante claro de piedra, en el centro del cual se descubrió una gran piedra con un diámetro de 20 centímetros. Los científicos se interesaron de inmediato por este hallazgo, su origen (meteorito, formación lunar) y el proceso de educación.
Vista general del panorama de la superficie durante la búsqueda de piedras:

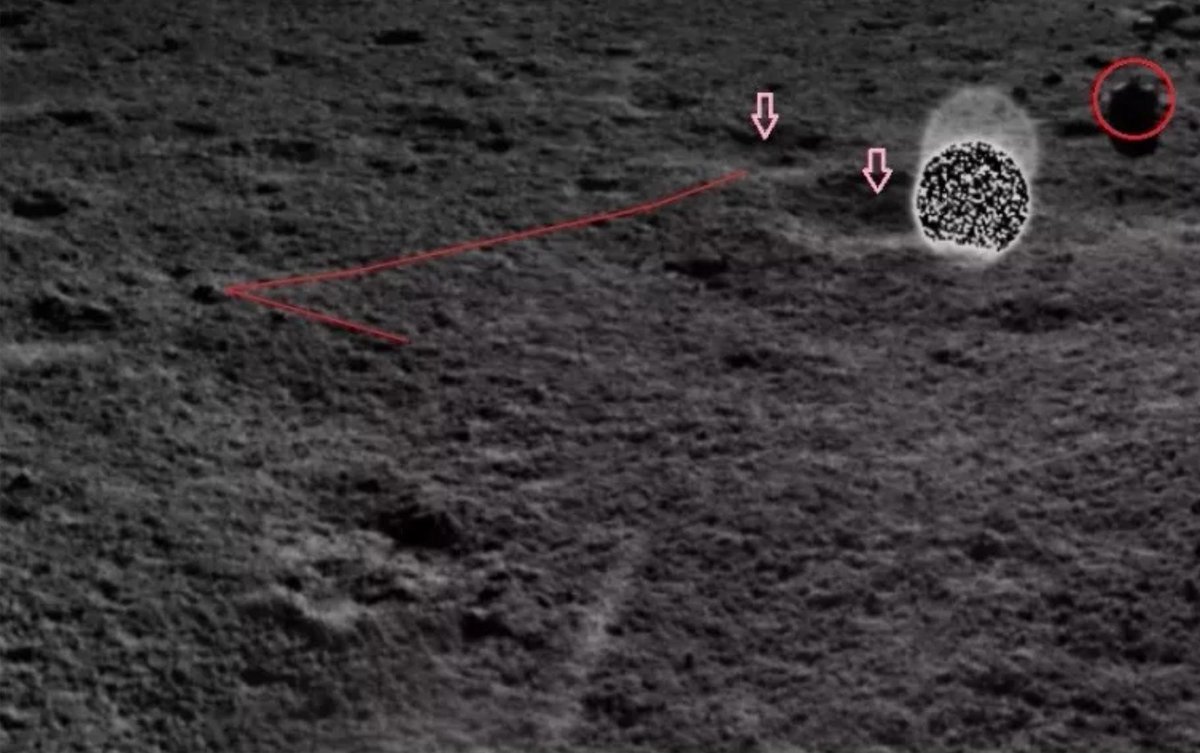
Una superficie rocosa, a una piedra grande (su diámetro es de 20 centímetros) una distancia de 120 centímetros:

Imagen más grande de una piedra grande:


Trabajar con un espectrómetro:
Además, los datos con el espectrómetro móvil Yutu-2 se transmiten al centro de control aeroespacial de la Academia China de Tecnologías Espaciales, donde se analizan, almacenan y se abrirán a la comunidad científica.
El portal chino "Sistema para publicar y recopilar datos científicos e investigaciones del espacio lunar y profundo", en el que se publicarán los datos e imágenes recibidos de Chang'e-4 (y misiones anteriores), también funcionó.
Camino al portal :
http://202.106.152.98:8081/moondata/El volumen de datos también es un punto interesante, por ejemplo, el rover Yut-2, después de tomar mediciones con un espectrómetro en cuatro puntos diferentes de la superficie lunar, transmitió un volumen de datos total de 350 MB.
Las mediciones científicas de los elementos de la superficie lunar y la transmisión de datos desde el rover "Yutu-2" continuarán el cuarto día lunar.