
“La simplicidad es la cosa más difícil del mundo; este es el límite extremo de experiencia y el último esfuerzo de un genio ". Leonardo da Vinci
Ahora, a menudo observando la competencia de los vehículos solares en Australia, se puede ver la identidad de algunos automóviles, cuya forma se asemeja a un catamarán. ¿Cuál es la razón de esto? ¿Qué ventajas contiene este formulario no solo para máquinas solares?
Sobre esto, y mucho más será este artículo.
Primero, una pequeña teoría.
La resistencia aerodinámica de un automóvil se puede reducir a tres parámetros.
- Resistencia del área frontal del automóvil.
- Resistencia a la forma (fricción de aire en las superficies laterales del automóvil).
- Una turbulencia de aire cerca de las ruedas y debajo del cuerpo.
En este caso, solo se considerará el primer parámetro. Dado que el límite en el segundo es una caída, ya se consideró parcialmente en artículos anteriores sobre
"colas en un automóvil" y la
futura anfibiosidad de los vehículos eléctricos , el tercero depende principalmente del ancho del neumático y la forma del disco, y no afecta significativamente el resultado final (en comparación con el primero dos)
Por frontal queremos decir el área F de la sección transversal vertical más grande del ATS, es decir contorno de su proyección frontal. En los cálculos aproximados, el contorno real se simplifica mediante segmentos de líneas rectas, lo que le permite representar el área como un conjunto de formas geométricas simples que no requieren cálculos complejos.
En el caso de un automóvil con suspensión dependiente, el área frontal es aproximadamente igual a la suma de 3 áreas elementales, m2:
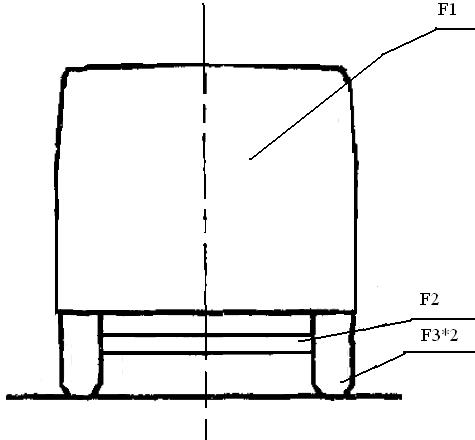
Donde
- área de la cabina por alas, m2;
- área de la viga del eje delantero, m2;
- el área abierta de las ruedas delanteras, m2.
Los vehículos de suspensión independientes no tienen una viga sobresaliente debajo del automóvil y, por lo tanto, el cálculo se vuelve más fácil. La forma del cuerpo depende del tamaño del área frontal, y cuanto más pequeña sea esta área, mejor podrá "traer" la forma correcta del cuerpo en longitud para reducir Cx (resistencia de forma).
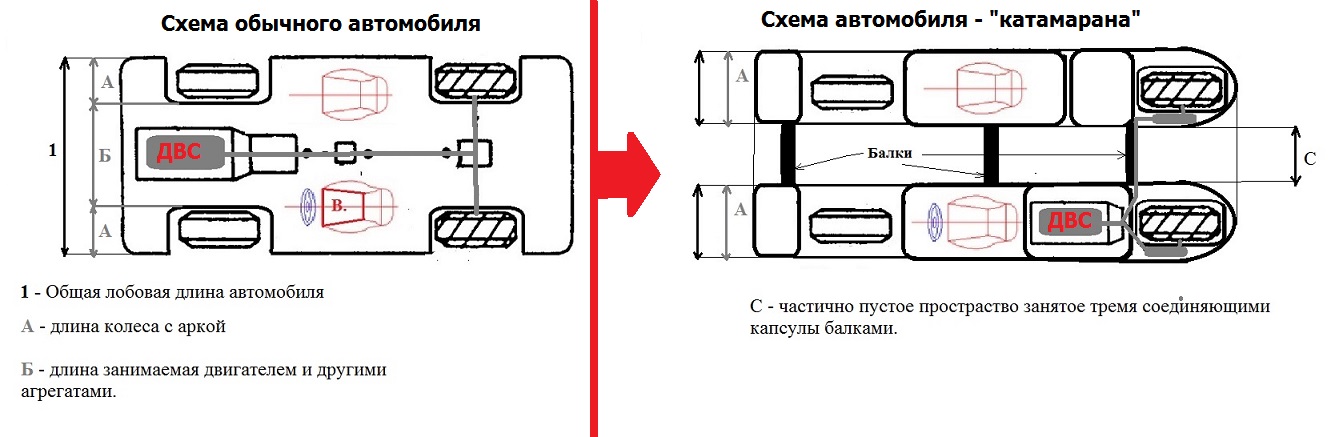
Debido al espacio "C", los vehículos con un diseño de catamarán pueden reducir el área frontal total del automóvil.
Persiguiendo el sol y la aerodinámica.
El principio de salvar el área frontal debido al diseño del catamarán en los últimos años es claramente visible en el ejemplo de las
WSC de un solo asiento
.
Estos autos solares, como muchos otros que no se muestran en la imagen, utilizan el mismo principio de organización de la forma, que se asemeja a un catamarán. La necesidad de esta forma es el deseo de ahorrar energía a alta velocidad.
Sin embargo, los registros de velocidad debidos a la racionalización eran característicos de esta forma del cuerpo antes.
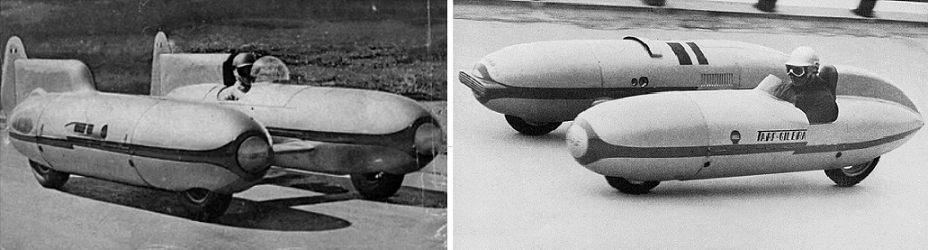
Entonces, en 1949, el corredor Piero Taruffy construyó dos autos catamarán a la vez: Tarf I, Tarf II. Exteriormente, prácticamente no eran diferentes.
En 1949, Taruffy recibió una patente por su auto récord de dos cascos en los Estados Unidos. Entre 1951-1952, el automóvil fue construido por Gilera utilizando su motor de motocicleta más potente. Dio 65 hp a 10400 rpm
El motor estaba ubicado en la góndola derecha, el piloto y el sistema de control en la izquierda. El 14 de octubre de 1954, Taruffy estableció un récord mundial para automóviles en la clase de hasta 500 cm3 - 201 km / h.
Pero solo era Tarf I. Al mismo tiempo, con solo un ligero retraso, Taruffy estaba construyendo un segundo automóvil de diseño similar: Tarf II. Sobre él se encontraba un potente motor Maserati de 1720 cc y 290 caballos de fuerza. Debido a la cabina muy pequeña, no había espacio para el volante en el automóvil, y el control se llevó a cabo mediante dos palancas, a la derecha y a la izquierda, ubicadas en las manos del piloto. El automóvil tenía un diseño opuesto al de la primera generación: el conductor estaba sentado a la derecha, el motor a la izquierda.
Sorprendentemente, el Tarf II, que comenzó a construirse más tarde que el Tarf I, terminó antes. El primer récord - velocidad promedio a una distancia de 50 millas, 231.744 km / h - Taruffy se estableció el 15 de enero de 1952.
De solo a 2-4 catamaranes terrestres locales.

El concesionario de automóviles de 1967 fue rico en sorpresas, y uno de ellos fue el extraño concepto OSI Silver Fox.
A primera vista, su diseño era irracional, porque el cuerpo claramente necesitaba rigidez en la parte central, para que no se hundiera bajo la influencia de fuerzas externas. Además, el pasajero y el conductor se sentaron a una gran distancia el uno del otro.
Sin embargo, el circuito de dos pones Silver Fox tenía una gran ventaja: permitía pasar debajo de la máquina exactamente la cantidad de aire que se requería en una pista en particular para un movimiento constante. En pocas palabras, el cuerpo le permite ajustar el nivel de carga aerodinámica. Para regular el volumen de masas de aire que atraviesan, Silver Fox tenía tres alas de puente: el "alerón" trasero era estacionario, el central era adaptable, cambiaba el ángulo de ataque según el momento de inercia, y el delantero era mecánicamente ajustable, como la mayoría de las alas estacionarias modernas .
Como resultado, el concepto, equipado con un motor Alpine de 4 cilindros y 1 litro y con un peso de 500 kilogramos, ¡podría acelerar a 250 kilómetros por hora! Al mismo tiempo, el consumo de combustible no fue excesivo, lo que también fue importante para participar en maratones diarios para los que se estaba preparando el automóvil.
Otras características interesantes de OSI Silver Fox incluyen la disposición original del volante "Lehman" (en el lado derecho) y una especie de equilibrio entre los lados: el motor ubicado en el pontón izquierdo fue equilibrado por el conductor y la rueda de repuesto, que estaban a la derecha.
La forma del automóvil, que recuerda a la letra "P" en el perfil, no se ha olvidado en nuestro tiempo. El Laboratorio de Investigación PrISUm, formado por estudiantes de la Universidad Estatal de Iowa, ha construido un prototipo de vehículo eléctrico solar Penumbra P14 que se puede utilizar en carreteras normales.

Este automóvil todavía tiene el potencial de reducir la resistencia si los desarrolladores aplican la idea de "jorobas" del Dodge Viper en el techo.
Estructuralmente, el cuerpo es muy simple, el acristalamiento y las ruedas son los más comunes, incluso hay una grabadora de radio como un automóvil normal. La única diferencia obvia son los paneles solares en el techo y el capó. Tal como lo concibieron los autores del proyecto, este automóvil debería ser una cierta etapa de transición entre un automóvil solar especializado y un automóvil eléctrico ordinario para uso familiar. Entre los patrocinadores del proyecto se encuentran Siemens y Boeing, que pueden considerarse superfluos, ya que el costo de desarrollo y construcción se estima en no menos de $ 750,000. Penumbra tiene un alcance de 322 km. La carrocería de este automóvil está hecha de materiales compuestos a base de fibras de carbono, como la mayoría de los automóviles eléctricos solares, lo que nos permite contar con una buena relación de resistencia a peso.
Además de Penumbra, hay 2 modelos más de solntsekars que tienen una forma similar.

Stella lux

Ardingly coche solar
Estos autos eléctricos están menos adaptados al uso normal del usuario, pero tienen mejores características.
A veces menos a menos da un plus ...
La empresa danesa RUF International está desarrollando activamente un proyecto que combina el transporte público y privado. El
sitio web del proyecto presenta varias opciones para el concepto de un nuevo monorriel.
Según el proyecto, se pueden superar pequeñas secciones de la pista en caminos comunes, pero básicamente se planea un movimiento más económico en los rieles del diseño original.

Se planea que dicho vehículo híbrido sea completamente automático, pero si es necesario, el conductor aún puede controlar la máquina de forma independiente. Es cierto que la velocidad de movimiento en los rieles tendrá un límite de no más de 120 km / h, que no se puede desactivar.
Según el proyecto RUF International, la red de carreteras para dichos automóviles consistirá en secciones de ferrocarril de 25 kilómetros con "cruces" especiales cada cinco kilómetros para que algunos conductores puedan unirse al movimiento, mientras que otros se apagan o se salen de los rieles. La velocidad máxima entre "cruces" (150 km / h) al acercarse a los intercambios se reducirá automáticamente a 30 km / h.
Está previsto que los coches eléctricos en forma de U reciban energía cuando se conduzca en un monorriel de forma inalámbrica, y esto debería ser suficiente para un movimiento corto en las carreteras comunes. Debido a esta hibridación, será posible reducir el peso y las dimensiones de las baterías de los vehículos eléctricos, lo que afectará positivamente las otras características de este transporte personal automatizado.
Se consideran dos opciones para el uso de tales vehículos eléctricos.
- Coche eléctrico personal con piloto automático nivel 5.
- "Car sharing" basado en la tarjeta personal del usuario.
El sistema RAF está diseñado con un alto nivel de versatilidad y, por lo tanto, está previsto que pueda utilizar máquinas de diferentes clases. En este caso, los camiones, autobuses y automóviles simplemente deben adaptarse para moverse sobre rieles debido al canal en forma de V que pasa a lo largo de la parte inferior del automóvil.
La "ranura" se ejecuta en el medio y el interior divide el interior en dos partes. Los desarrolladores sugieren usar la "colina" como reposabrazos o "lugar para el niño".
El sistema de monorriel está diseñado para grandes ciudades, pero los autores del proyecto no se olvidaron de los residentes del área suburbana: se proporciona un transporte híbrido con motores eléctricos y de combustible.
La principal ventaja de la introducción del sistema de transporte híbrido RUF será su componente ambiental, que se expresará en la reducción de los costos de energía para el transporte y el mantenimiento de las carreteras.
Por ejemplo, el transporte público de cercanías llamado Maxi-RUF es un autobús que puede transportar a diez pasajeros, sin contar al conductor.
La compañía ha estado trabajando en su concepto desde 1988. RUF International tiene 16 patrocinadores, incluida la filial danesa de Siemens y los ministerios daneses de energía y medio ambiente.
A primera vista, el concepto de los daneses está en duda, aunque este proyecto tiene raíces muy antiguas. Entonces, en el siglo XIX, el ingeniero francés Charles Larting desarrolló un riel similar en apariencia para el movimiento de locomotoras.
Este transporte ferroviario recibió el nombre: monorraíl del sistema Lartig.
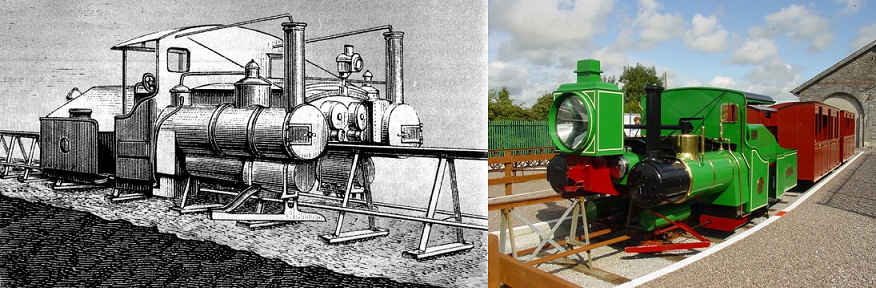
Este es uno de los primeros monorraíles en general, y al mismo tiempo uno de los primeros monorraíles, que tuvo una aplicación práctica. Una de las carreteras más famosas en las que se usaba se llamaba Listowel y Ballybunion Railway.
En sección transversal, el camino era similar a la letra "A" de aproximadamente un metro de altura. Arriba estaba el riel principal (rodamiento), desde la parte inferior a los lados había dos rieles guía. Este camino se estableció en la superficie de la tierra en durmientes. Se instalaron secciones con la forma de la letra "A" a una distancia de aproximadamente un metro entre sí. Dado que la longitud de las "patas" de las secciones puede ser arbitraria, durante la construcción no hay necesidad de nivelar el suelo debajo de las vías.
Además de las ruedas principales que descansan sobre el riel superior, las locomotoras y los vagones tenían ruedas de apoyo que descansaban sobre los rieles guía y protegían al tren de que se volcara. El sistema Laring es altamente adaptable, fácil de desmontar y transportar de un lugar a otro.
El factor más importante en la operación de tal carretera es asegurar el equilibrio del tren. Antes de la salida, el conductor se aseguró de que el número de pasajeros en la mitad del automóvil en un lado del riel correspondiera al número de pasajeros en la mitad del automóvil en el otro lado del riel. El proyecto RUF en este caso no pasará por alto este "obstáculo" durante la implementación, pero los automóviles y autobuses por peso ciertamente no se pueden comparar con los trenes.
"Catamaranes" anfibios
¿Es un catamarán originalmente un vehículo acuático? Entonces, ¿realmente no había híbridos anfibios de este diseño?
Fueron! Y especialmente los productos caseros originales se pueden encontrar en el período de la URSS.


Catamarán universal de la URSS sobre agua - hielo - tierra. Una nota sobre él estaba en la revista Tech-Youth 1962, número 4, y en su totalidad se ve así.
“¿Qué hacer para los amantes de los deportes acuáticos y el turismo de larga distancia, que viven lejos de ríos y estanques? ¿Dónde almacenar botes a motor y botes, cómo llevarlos al agua, dónde colocar los juegos de ruedas y otros vehículos necesarios para el transporte e innecesarios cuando el viaje comienza en el agua?
Al reflexionar sobre estos temas, estaba convencido de que la mejor solución es un vehículo todo terreno anfibio que puede moverse sobre ruedas en el suelo, nadar en el agua y, en invierno, deslizarse sobre esquís en la nieve. En un vehículo todo terreno de este tipo, no cuesta nada conducir varias decenas de kilómetros a lo largo de la carretera. Al llegar al embalse, es suficiente quitar las ruedas y continuar el viaje a través del agua.
Para darle a los anfibios la mayor estabilidad posible, decidí hacerlo en forma de catamarán. Para hacer esto, era necesario hacer dos proyectiles aerodinámicos idénticos. Instalé 12 marcos de madera contrachapada de 10 mm en una rampa, incruste 12 largueros externos de un listón de pino de 8x18 mm y 6 internos en ellos. Después de esto, el marco de cada caparazón se pegó con una capa de chapa de abedul.
Luego, se prepara una composición para pegar los marcos con calico grueso y fibra de vidrio a partir de resinas epoxídicas: (EDF-1 - 60 partes, EDF-3 - 40 partes; ftalato de dibutilo - 13 - 15 partes, polietilen poliol - 16-18 partes). Para evitar que el compuesto entre en contacto con las manos, la cara, guantes de goma y un mono tonto con cordones en los puños, las resinas epoxi se vierten en un baño de hojalata y se calientan a 80–90 ° .
Después de eso, el baño se instala en la báscula y se le agrega un plastificante (dibutilftalato). La mezcla se mezcla a fondo y se enfría simultáneamente a 24ºC. Ahora, en la mezcla enfriada, debe agregar un endurecedor (polietilen-poliol), mezclándolo fuertemente para evitar aglomeraciones. Todo esto se aplica uniformemente en la superficie de la envoltura, y la temperatura debe ser de aproximadamente 24-30 ° C, porque de lo contrario la mezcla se espesa rápidamente y penetra poco en el tejido de la tela. El calicó grueso o fibra de vidrio se estira sobre la capa de recubrimiento y se enrolla cuidadosamente con espátulas. En una chapa de abedul, una pegatina está hecha de una capa de fibra de vidrio y una capa de calicó. Solo en los lugares de futuras aberturas para marcos de conexión hay correas transversales adicionales de 4 capas de fibra de vidrio pegadas, cada una de 20 cm de ancho.
Después de suavizar y suavizar las irregularidades, cada capa se pega por completo con una capa de fibra de vidrio y se pega una tira adicional en la parte inferior.
Luego, dos cubiertas aerodinámicas están interconectadas por cuatro marcos desmontables soldados de tuberías de alimentación de cromo de paredes delgadas. Las horquillas extraíbles se cuelgan en los extremos sobresalientes de los dos marcos delanteros, a los que se unen las ruedas del scooter Tula-200, o los hidroalas o los esquís.
Dos ruedas delanteras están conectadas ball-nirno y son giratorias. La tercera rueda, montada entre los dos bastidores traseros en el truss trapezoidal, es la rueda motriz. Está previsto instalar un motor con una hélice para movimiento en el agua o la nieve.
En la actualidad, los soportes de las ruedas delanteras y el truss de la rueda trasera se retiran para el movimiento del agua. Se monta un soporte con un carro móvil para instalar el motor de dirección de Moscú en lugar de la granja.
En el verano de 1961, comenzaron las pruebas de prueba del catamarán en el agua. Con el motor "Moscú" en 10 litros. s y con 4 pasajeros, el catamarán caminó libremente alrededor de botes durales del tipo Mir con el mismo motor y 2-3 pasajeros. A toda velocidad, el catamarán entró en el modo de planeo, dos gotas de bigotes aparecieron en el frente, y entre las "colas" de las conchas, dos pequeñas columnas de agua divergentes en forma de abanico. No se observaron remolinos característicos de lanchas de popa planas.
El catamarán demostró ser muy estable debido a una especie de "autorregulación" debido a la presión de una corriente divergente de agua en las partes de la cola de las conchas. El calado con una carga de 800 kg era de solo 120 mm. El peso del catamarán con el motor de Moscú es de aproximadamente 120 kg. El control de la rotación del motor "Moscú" se realiza en la cabina trasera izquierda. El gas se regula girando la manguera flexible.
Durante las pruebas, se revelaron la rigidez y la resistencia mecánica suficiente de los depósitos. Se puede suponer que, en términos de estabilidad y velocidad, el catamarán no cederá ante los tipos existentes de embarcaciones a motor. Si es necesario, la carcasa del catamarán se puede desconectar para su transporte por carretera o ferrocarril.
En el futuro, las pruebas se llevarán a cabo con hidroalas, esquís, un motor M-61 de 30 caballos de fuerza y tracción trasera hidráulica.
Al construir el catamarán, utilicé las resinas epoxi con experiencia de la planta de plástico Nizhne-Tagilsky. A pesar de la imperfección de la fabricación manual de conchas, están bien justificadas en términos de resistencia mecánica y resistencia al agua. Aunque estas resinas son de color oscuro, se pueden pintar según sea necesario. Durante la construcción del catamarán, el Instituto Forestal de los Urales me brindó asistencia y los miembros del Sverdlovsk Marine Club DOSAAF ayudaron en las pruebas.
B. QUERIDO, ingeniero.Es una pena que el autor no haya pensado en la versión aerotransportada del uso de su "catamarán todoterreno", pero ya hemos pensado en un catamarán aéreo en nuestro tiempo.
Catamaranes Voladores
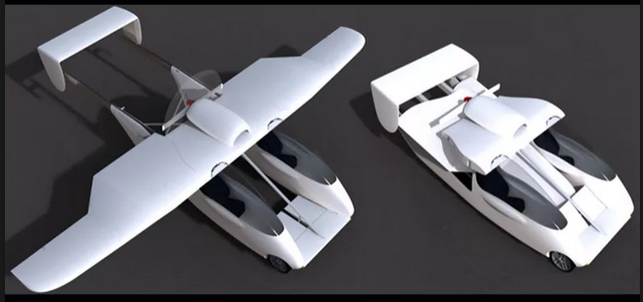
Carplane GmbH ha creado un coche volador específico.
Este automóvil volador no tiene uno, sino dos fuselajes completos, y tiene la capacidad de transformarse de un automóvil a otro. ¿Cómo va esto? Cuando el avión se mueve en el suelo, las alas y la hélice se pliegan en el medio del automóvil, justo entre dos fuselajes de un solo asiento. Si una máquina voladora necesita despegar, entonces estas alas se expanden rápidamente utilizando accionamientos eléctricos, y la parte trasera de un automóvil volador con dos quillas también se extiende más de dos metros.
El avión tiene un motor de 150 caballos de fuerza, en la carretera puede acelerar a un máximo de 176 km por hora, y en el aire su velocidad máxima es de 222 km por hora. La velocidad de crucero de un automóvil volador Carplane es de 200 km por hora, y si vuela con esta velocidad, un tanque de gasolina por cada 100 litros es suficiente para exactamente 830 kilómetros.Carplane no es el único catamarán de aviones de este tipo y hay un dispositivo aún más avanzado en términos de aerodinámica. BiPod es un vagón de avión que puede viajar en carreteras regulares. El cuerpo de la máquina se divide en dos volúmenes. En cada uno de los "flotadores" hay un lugar para el conductor y la unidad híbrida, y las alas pueden plegarse en la abertura entre los edificios.El dispositivo tiene un circuito de accionamiento híbrido en serie. Entonces, en cada fuselaje hay un generador rotativo ICE de 450 cc. Las baterías de litio se encuentran en la nariz, y los motores eléctricos de tracción trasera de 15 kilovatios se encuentran en la parte trasera. Ruedas de dirección en el frente.PD: La historia a menudo se mueve en círculo, y tal vez la transición a una forma bifurcada de autos podrá resolver no solo los problemas de ahorro de energía, sino también la seguridad de los peatones, la estabilidad en las esquinas e incluso la supervivencia durante un impacto lateral. Todo esto sigue siendo solo conceptos de ideas a nivel de teoría, y algunas analogías con tecnologías ya probadas, pero al igual que con la idea RUF, aquí básicamente no hay nada complicado: la única pregunta es la necesidad de tales mejoras.
BiPod es un vagón de avión que puede viajar en carreteras regulares. El cuerpo de la máquina se divide en dos volúmenes. En cada uno de los "flotadores" hay un lugar para el conductor y la unidad híbrida, y las alas pueden plegarse en la abertura entre los edificios.El dispositivo tiene un circuito de accionamiento híbrido en serie. Entonces, en cada fuselaje hay un generador rotativo ICE de 450 cc. Las baterías de litio se encuentran en la nariz, y los motores eléctricos de tracción trasera de 15 kilovatios se encuentran en la parte trasera. Ruedas de dirección en el frente.PD: La historia a menudo se mueve en círculo, y tal vez la transición a una forma bifurcada de autos podrá resolver no solo los problemas de ahorro de energía, sino también la seguridad de los peatones, la estabilidad en las esquinas e incluso la supervivencia durante un impacto lateral. Todo esto sigue siendo solo conceptos de ideas a nivel de teoría, y algunas analogías con tecnologías ya probadas, pero al igual que con la idea RUF, aquí básicamente no hay nada complicado: la única pregunta es la necesidad de tales mejoras.