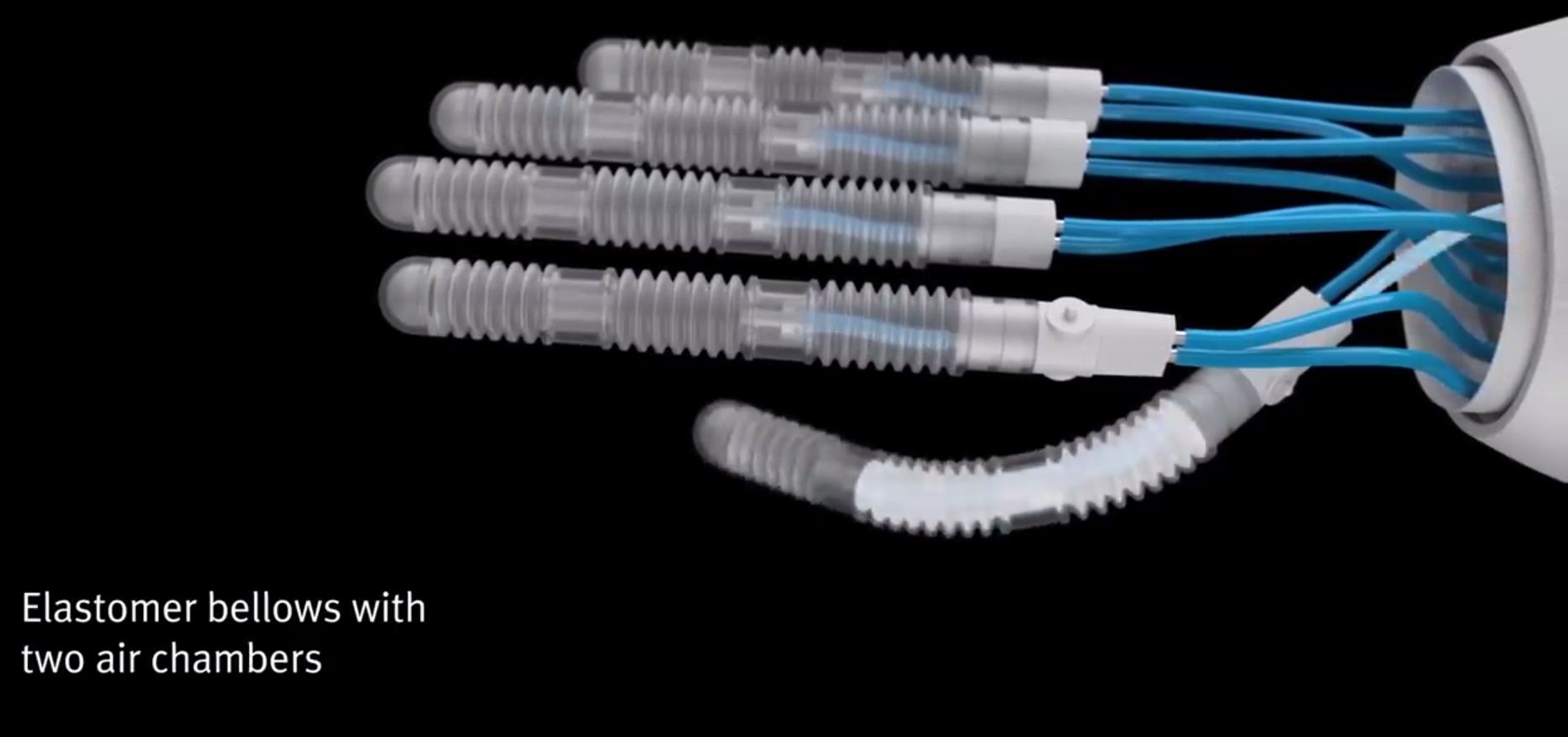
No hay una estructura esquelética en esta solución, la mano está hecha de materiales suaves y flexibles, las falanges de los dedos están hechas de tela textil tridimensional con sensores táctiles y conductores flexibles que se pueden doblar con módulos neumáticos. Se instala un nudo con válvulas en la muñeca, que acciona los elementos de la mano, si es necesario, con movimientos motores finos.
Los movimientos de BionicSoftHand están controlados por inteligencia artificial, capaz de aprender mediante prueba y error, y después de adaptarse a la tarea, realizar de forma rápida y autónoma las acciones necesarias con objetos, de forma similar a como lo hace una persona

Enlace a la descripción del fabricante de la solución
BionicSoftHand aquí .
 El brazo robótico BionicSoftHand está equipado con:
El brazo robótico BionicSoftHand está equipado con:- fuelles inflables, alrededor de los cuales hay un tejido tridimensional hecho de impresión 3D hecha de fibras elásticas, que se dobla junto con los movimientos de la mano cuando el aire se alimenta al fuelle, similar al trabajo de los músculos y tendones;
- módulos rotativos neumáticos;
- terminal de válvulas para 24 válvulas piezoeléctricas;
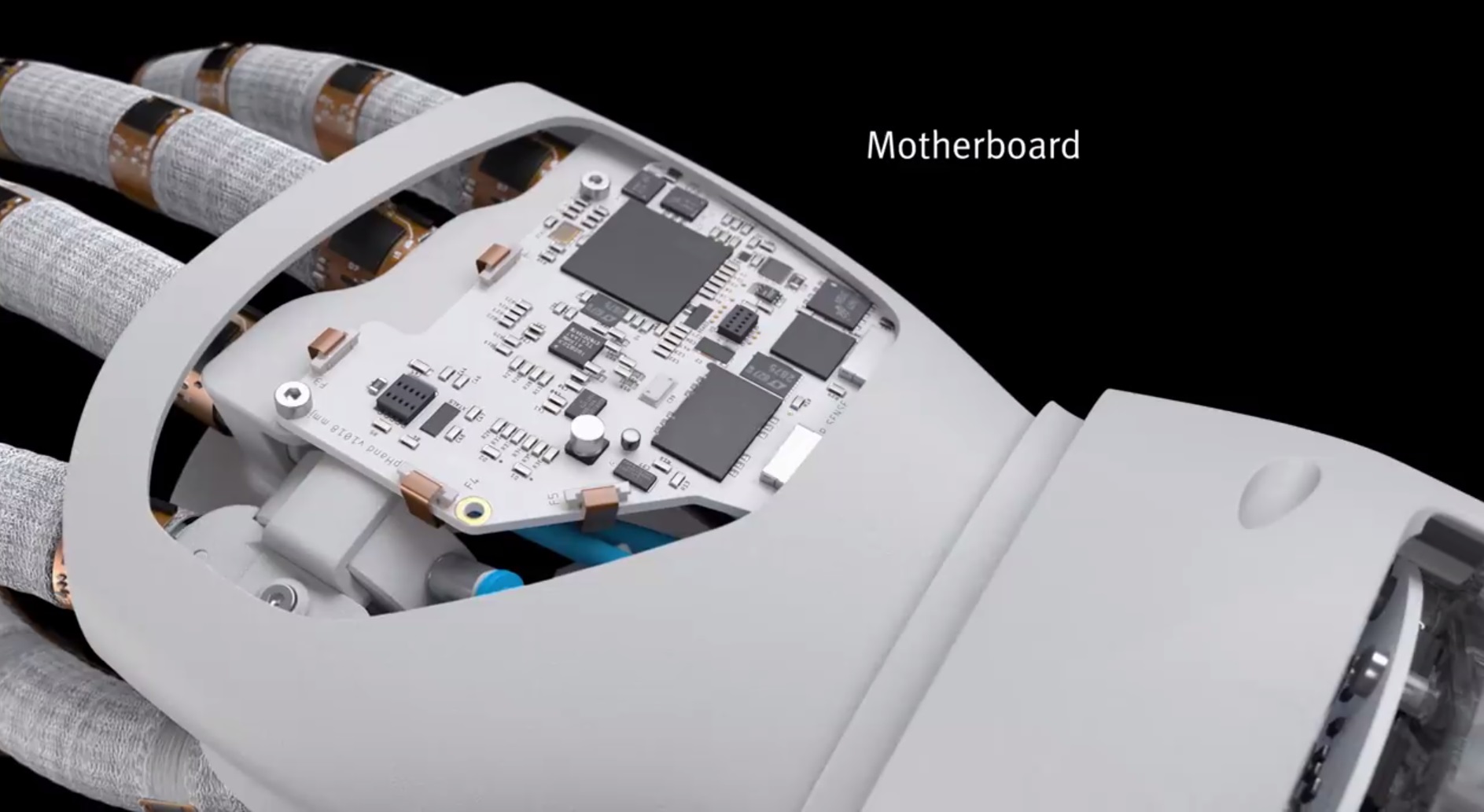
- una placa base a bordo, incluso para el control de movimiento autónomo;
- sensores de inercia (movimiento) y fuerza (instalados en dedos blandos), que también se crean sobre la base de materiales flexibles y pueden doblarse en el momento del movimiento;
- un módulo AI de autoaprendizaje, capaz de calcular independientemente la mejor forma de interactuar con diferentes objetos y realizar diversas acciones, y en el menor tiempo posible, recibir datos de cámaras 3D con percepción de profundidad para analizar objetos y movimientos.
Características técnicas de los componentes del dispositivo:
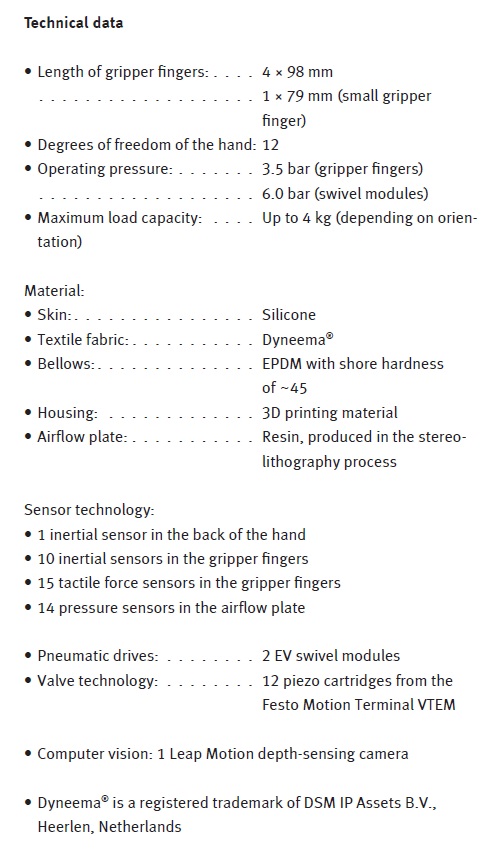


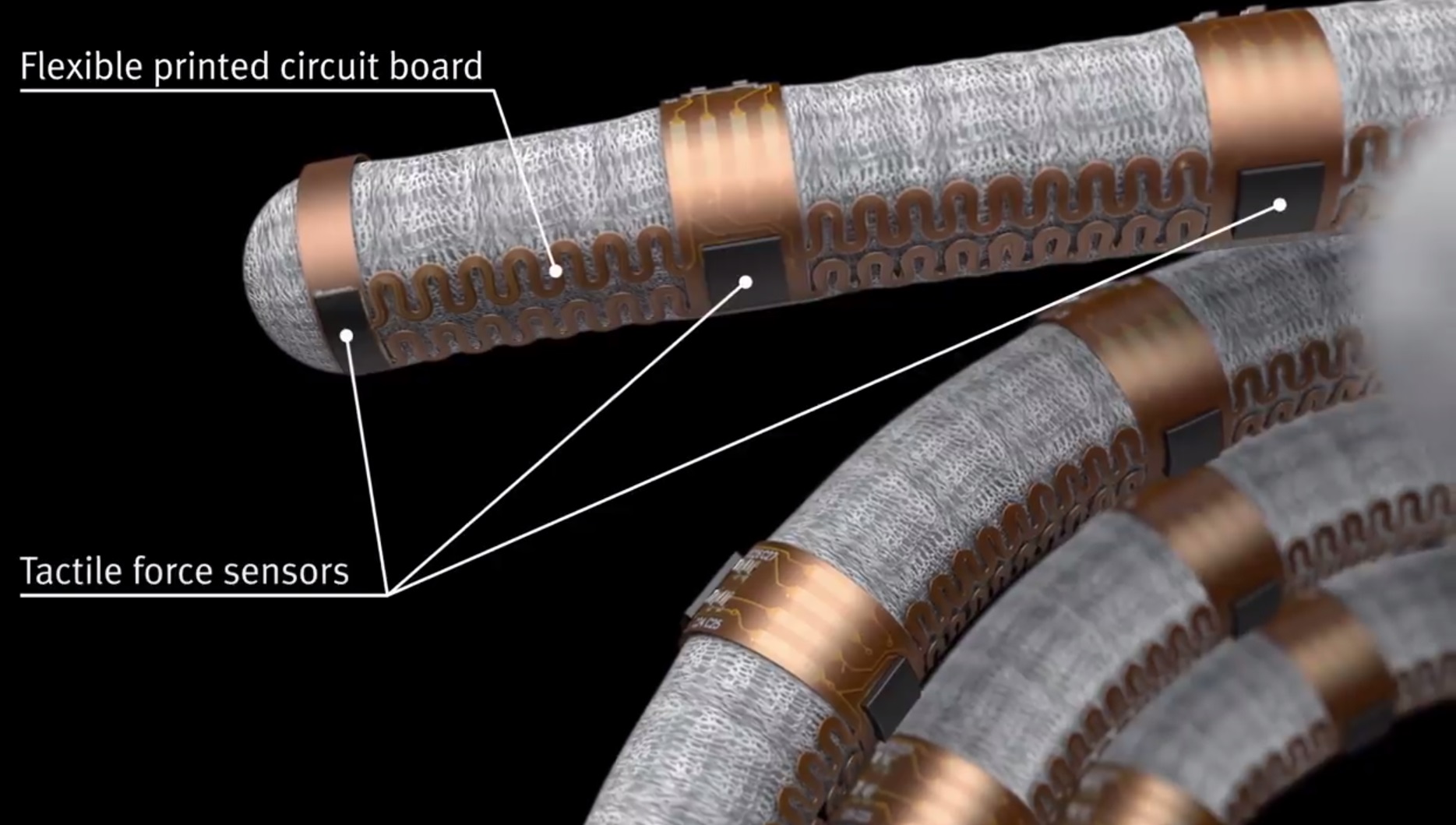





Una serie de sensores táctiles en los dedos de la mano proporciona retroalimentación a los sistemas de control de la mano (con los componentes de la IA), informando sobre los movimientos de la mano y los dedos, así como sobre los métodos y movimientos en contacto con diferentes objetos, la misma IA analiza la información sobre si es correcta Un objeto se encuentra en la mano para su manipulación, utilizando una matriz de percepción de contacto, imitando el sentido del tacto de una persona. Además, la IA calcula qué esfuerzos se deben hacer para sujetar al sujeto, qué tipo de secuencia motora se debe realizar para las posiciones y movimientos de los dedos, qué tan ancho es para abrir la palma, etc.

Inicialmente, la mano BionicSoftHand no estaba programada para ningún movimiento específico, y la IA conectada a su tablero de control está capacitada en el proceso de realizar tareas de prueba utilizando tecnología de aprendizaje paralelo, creando en un entorno virtual, con el tiempo permitiendo que el brazo robótico se vuelva solo "más inteligente", pero para soluciones de nuevos problemas para usar combinaciones de movimientos que ya se han estudiado y verificado con acciones reales, que luego se optimizan para nuevas tareas.

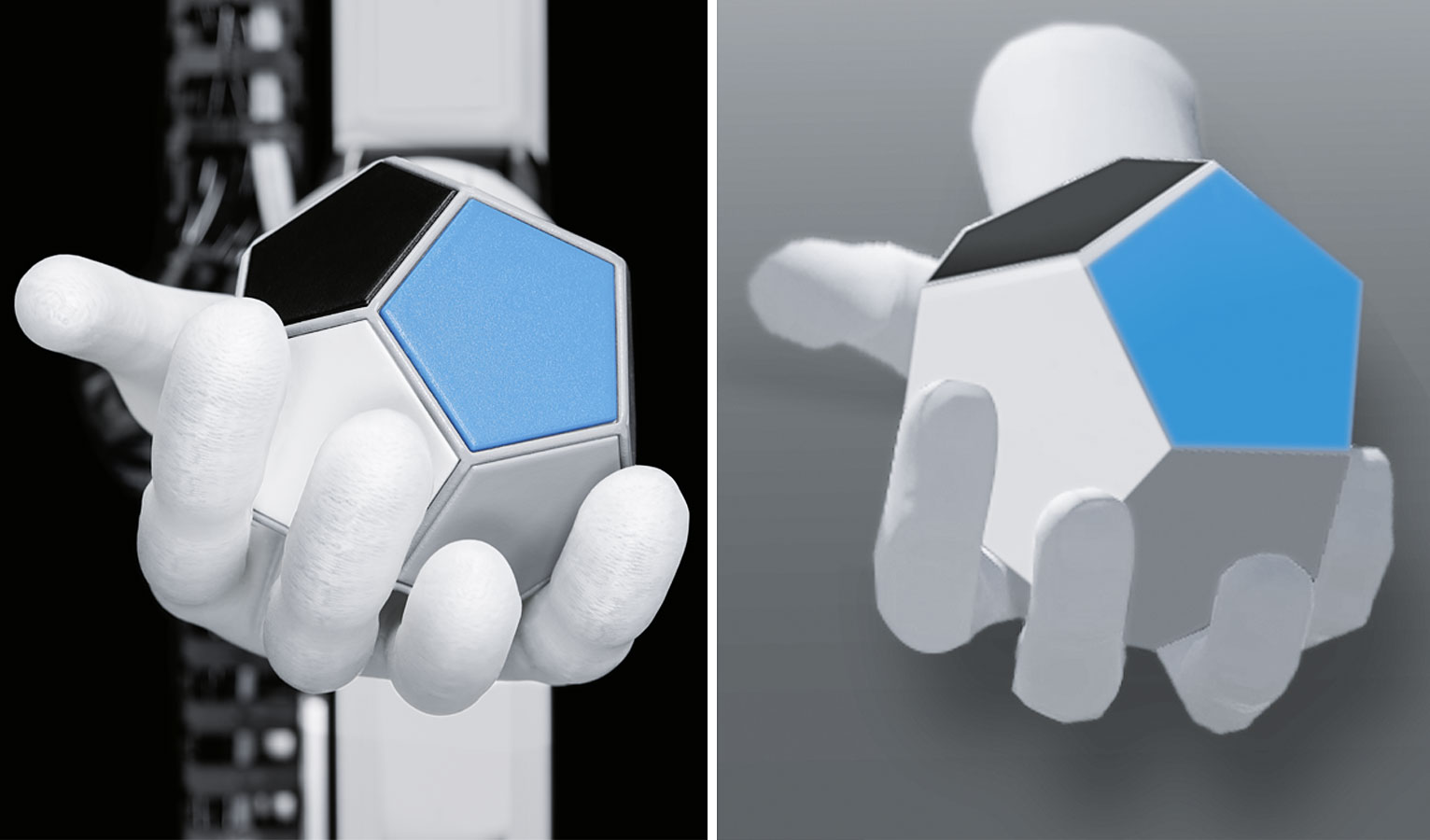

En el video de demostración a continuación, a los AI con el brazo robótico se les dio la tarea de mover el objeto de 12 lados colocado en la mano para que cierta cara mirara hacia arriba, sin explicar los pasos para completar esta tarea.
Primero, usando una cámara 3D con percepción de profundidad, la IA crea una copia digital del objeto, y luego la coloca en una simulación virtual con muchas manos virtuales que manipulan el objeto hasta que se selecciona la combinación correcta.
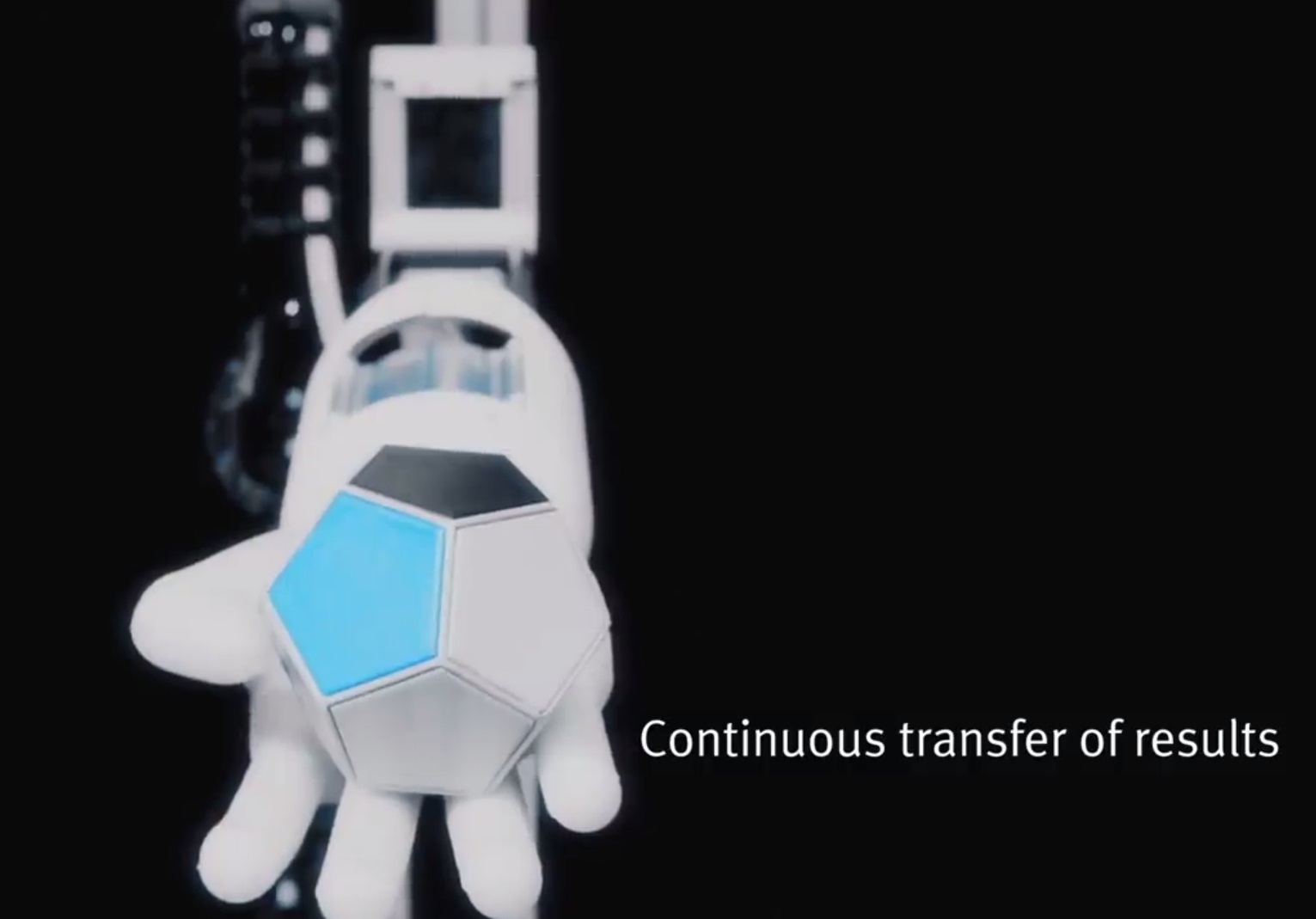
Luego, la IA calcula las opciones para encontrar y realizar rápidamente acciones óptimas con el sujeto, y luego las realiza en realidad, controlando los elementos de BionicSoftHand.
Componentes para crear Electrónica Evgeny Veltistov cada vez más cerca de la realidad.