Para beneficiar a las personas, los robots necesitan aprender a caminar como nosotros.

Durante muchas décadas, los robots han podido caminar sobre dos patas. Hoy en día, los robots humanoides más avanzados pueden caminar sobre superficies planas e inclinadas, subir y bajar escaleras y atravesar terrenos irregulares. Algunos incluso saben saltar. Pero, a pesar de este progreso, los robots con patas todavía no se pueden comparar en términos de destreza, eficiencia y confiabilidad con personas y animales.
Los robots para caminar existentes consumen energía y dedican demasiado tiempo al entrenamiento. Con demasiada frecuencia fallan y se rompen. Para convertirse en los asistentes robóticos con los que hemos estado soñando durante tanto tiempo, estas máquinas tendrán que aprender a caminar como nosotros.
Definitivamente necesitamos crear robots con patas, porque nuestro mundo está diseñado para piernas. Pasamos por cuellos de botella, rodeamos obstáculos, subimos y bajamos las escaleras. Es difícil para los robots con ruedas u orugas moverse en aquellos lugares que adaptamos para nuestros cuerpos.
Y muchos robots humanoides tienen piernas que se parecen a las nuestras: caderas, rodillas, tobillos y pies. Pero ahí es donde terminan las similitudes. Si, por ejemplo, comparamos la fuerza con la que el robot presiona la tierra con la misma en humanos, resulta que a menudo son muy diferentes. La mayoría de los robots humanoides, que se originan en los primeros ejemplos de brazos robóticos industriales, controlan las extremidades para que se muevan con precisión a lo largo de caminos predeterminados. Sin embargo, moverse sobre dos piernas requiere no tanto control de posición como control de fuerza, e implica una amplia gama de flexibilidad y elasticidad, conocida en robótica como cumplimiento, que le permite hacer frente a contactos inesperados.
Muchos grupos de investigación están tratando de crear robots menos rígidos que puedan moverse de una manera más dinámica y humana. El más famoso de estos proyectos probablemente será
Atlas de
Boston Dynamics , un humanoide capaz de correr sobre suelo duro y blando, saltar sobre troncos e incluso hacer volteretas. Pero, de nuevo, al comparar el movimiento de los robots más complejos con los animales, vemos que las máquinas no son suficientes.
¿Qué nos estamos perdiendo? La tecnología no es el mayor problema: los motores son lo suficientemente potentes, los materiales son lo suficientemente fuertes, las computadoras son lo suficientemente rápidas. La limitación, aparentemente, es nuestra comprensión de cómo funciona caminar.
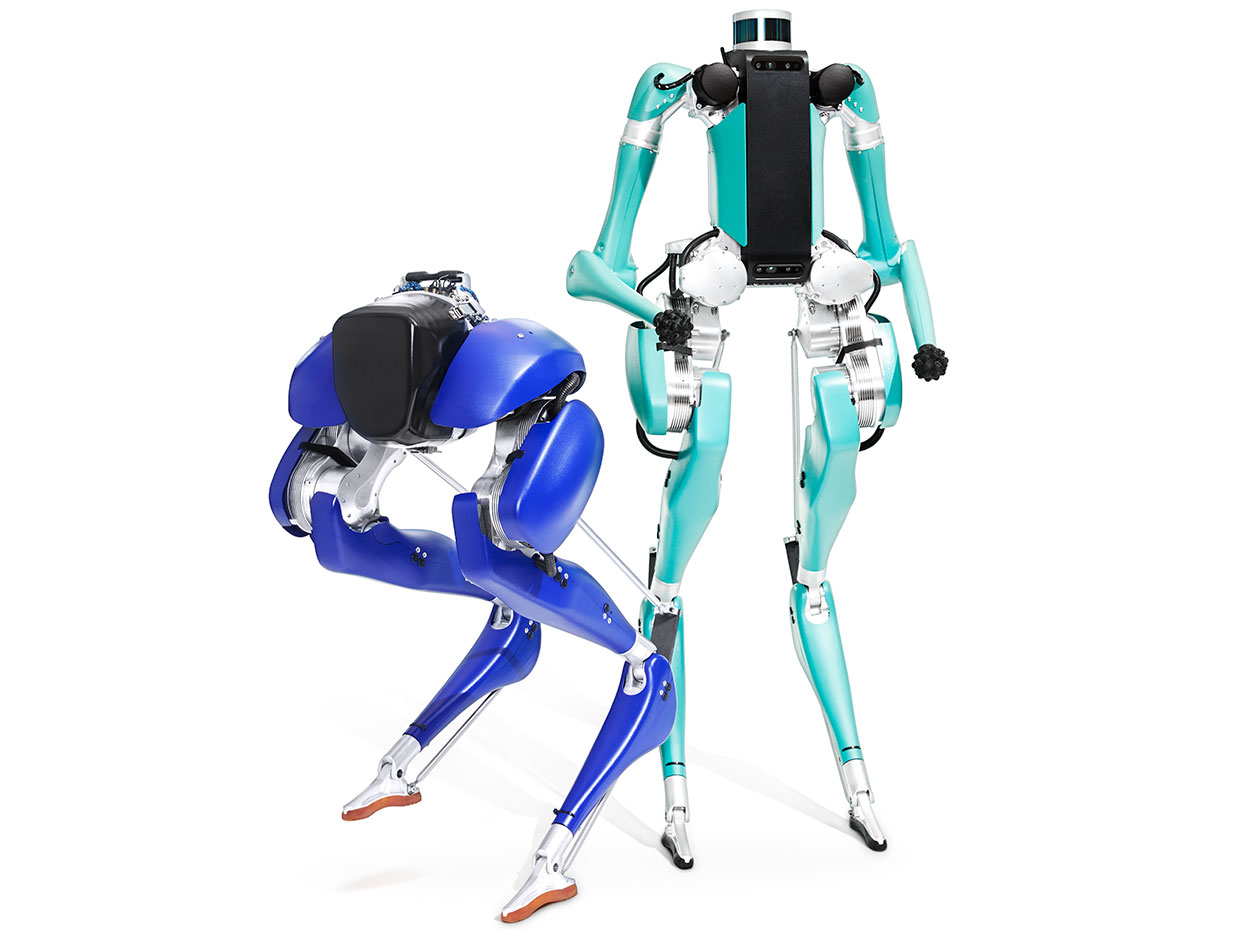 Cassie Robots (izquierda) y Digit de Agility Robotics
Cassie Robots (izquierda) y Digit de Agility RoboticsEn el Laboratorio de Robótica Dinámica de la Universidad de Oregón, dirigí un equipo de investigadores que intentaban descubrir los principios básicos de la marcha y aplicar estos descubrimientos a los robots. También soy el cofundador y director de tecnología de
Agility Robotics , una startup en Albany, Oregon, que estudia el uso comercial de los robots para caminar. En 2017, abrimos el mundo a Cassie, una plataforma de dos patas que vendimos a varios equipos de investigación. Pronto nuestro nuevo robot podrá ingresar al mundo: las piernas de Digit son similares a las piernas de Cassie, pero él tiene sensores y un par de manos, que usa para estabilizar y, en el futuro, manipular.
Tanto en el laboratorio como en la empresa, estamos trabajando para crear un futuro en el que los robots puedan ir donde la gente pueda. Creo que los robots con patas dinámicas algún día podrán ayudar a cuidar a los ancianos en su hogar, participar en operaciones de rescate en caso de incendios y terremotos, y entregar paquetes a sus hogares. Los robots de pierna también permitirán la creación de exoesqueletos y prótesis que ayudarán a aumentar la movilidad de las personas con discapacidad. Finalmente traen robots de ciencia ficción a la realidad.
Algunas aves corren mejor de lo que vuelan, o incluso no vuelan en absoluto. Las avestruces, pavos, gallinas de Guinea y codornices no pueden volar como un halcón, sino que se mueven rápidamente a pie. Mis colegas del laboratorio y Monica Daily del Royal Veterinary College de la Universidad de Londres pasaron innumerables horas observando a las aves caminando y corriendo por el laboratorio. Queremos entender cómo estos animales pueden moverse de manera tan ágil y eficiente, ¡y sin embargo la mayoría de estas máquinas emplumadas trabajan en semillas!
En un experimento, una gallina de Guinea corre a lo largo de un camino, y luego pisa un agujero disfrazado como una servilleta. El animal no sabía que entraría en un hoyo aproximadamente la mitad de la longitud de sus patas, sin embargo, no tropezó, y su pata se extendió y se adaptó al surco en la carrera. En este proceso, sucede algo notable: el cerebro del pájaro no necesita sentir ni reaccionar a la indignación, ya que sus patas se las arreglan ellos mismos.
Esto da una idea importante para los desarrolladores de robots: si primero crea un robot y luego decide programarlo para movimientos ágiles, no tendrá éxito. Como es el caso de las gallinas de Guinea, la destreza de un robot vendrá principalmente de las propiedades mecánicas de su cuerpo, de lo que la robótica llama dinámica pasiva. Y se descuida en la mayoría de los proyectos para el desarrollo de robots con patas. Al desarrollar cuidadosamente la dinámica pasiva del robot en paralelo con el llenado del software, incorporándolos a un sistema integrado, aumenta las posibilidades de que un robot se acerque a las características de un animal.
Vale la pena señalar que, aunque nos inspiramos en los animales, no reproducimos la forma del pie del pájaro o la construcción de músculos y huesos en el pie humano. Queremos comprender la física del movimiento de los animales y derivar de él un modelo matemático abstracto que se pueda entender, verificar en simulaciones por computadora y encarnar en robots reales. Dado que al crear robots usamos metal y electrónica en lugar de huesos y cerebros, pueden ser muy diferentes de los animales, utilizando la misma física.
Uno de los modelos matemáticos más simples describe una masa puntual (tronco) conectada a un par de resortes (patas) ideales. Este modelo de masa primaveral es, por supuesto, simplificado; se parece a un hombrecillo de guiones y no tiene en cuenta la presencia de articulaciones en los pies o el hecho de que los pies no tocan el suelo en puntos aislados. Aún así, el modelo de masa de primavera puede producir resultados inesperados. En simulaciones, puede reproducir casi todos los paseos que las personas y los animales usan para caminar y correr.
 Primeros pasos: las patas del robot ATRIAS no son humanas, pero fue la primera máquina en mostrar una forma de andar humana
Primeros pasos: las patas del robot ATRIAS no son humanas, pero fue la primera máquina en mostrar una forma de andar humanaPara probar el modelo de masa de resorte, desarrollamos el robot bípedo
ATRIAS , cuyo nombre es el acrónimo de nuestra suposición básica:
Supongamos que el robot es una esfera [imagine que el robot es una esfera]. La idea era que la dinámica pasiva del robot pudiera recrear el modelo de masa puntual con patas de resorte con la mayor precisión posible.
Cada pata está hecha de varillas ligeras de fibra de carbono ensambladas en un paralelogramo, conocido como el articulado de cuatro enlaces.
Dicha estructura minimiza la masa de las piernas y su inercia, acercando el sistema al modelo de masa de resorte. Equipamos la parte superior de las patas con resortes de fibra de vidrio, realizando físicamente el "resorte" del modelo, procesando colisiones con el suelo y almacenando energía mecánica.
Al principio, ATRIAS apenas podía sostenerse, y lo apoyamos con una correa superior. Pero mejoramos el controlador que rastrea la velocidad y la inclinación del cuerpo, y el robot primero comenzó a dar los primeros pasos y luego caminar libremente por el laboratorio. Entonces ATRIAS aprendió a recuperarse de los disturbios: en un experimento, mis alumnos le arrojaron bolas. También llevamos ATRIAS al campo de fútbol de la universidad, lo aceleramos a una velocidad máxima de 7.6 km / h, y luego nos detuvimos rápidamente.
Para comprender mejor lo que estaba haciendo el robot, imagina que te vendaron los ojos, caminas sobre zancos, y tu cuerpo está envuelto en una alfombra, y no puedes usar tus manos para mantener el equilibrio. Solo puedes ir más allá: esto es lo que hizo ATRIAS. Incluso podría hacer frente a obstáculos, por ejemplo, con un montón de leña en el camino.
Y, aunque la destreza era un componente importante, también era muy importante economizar energía. Confirmamos la rentabilidad del robot midiendo un parámetro conocido como costo de transporte [COT]. Se define como la relación entre el consumo de energía (potencia) y el producto de peso y velocidad, y se utiliza para comparar la eficiencia energética de animales y máquinas en movimiento. Cuanto más bajo sea el COT, mejor. En una persona que camina, el SOT es 0.2, y en un robot humanoide ordinario, esta cifra es mucho más alta, de 2 a 3, según
algunas estimaciones . Nuestros experimentos
demostraron que en ATRIAS en modo caminar, el COT es 1.13, lo que demuestra la
efectividad de los robots dinámicos. Y, de hecho, alimentado por varias baterías de polímero de litio, como las que se usan en los automóviles controlados por radio, ATRIAS podría funcionar durante aproximadamente una hora.
También
medimos la fuerza con la que el robot presiona el suelo. Ponemos ATRIAS con un peso de 72,5 kg (aproximadamente el tamaño de una persona promedio) en una plataforma eléctrica: esta herramienta se usa a menudo en la medicina deportiva para medir la marcha de una persona a través de la medición de las fuerzas de reacción. Al caminar con el robot, registramos datos sobre las fuerzas. Entonces uno de mis alumnos tomó el lugar de ATRIAS, y registramos sus pasos. Habiendo construido un gráfico de la dependencia de la reacción de soporte en el tiempo, vimos que coincide exactamente con el gráfico del robot. Hasta donde sabemos, esta es la implementación más realista de la dinámica de la marcha humana de los robots en la actualidad.
Los resultados confirmaron que se puede implementar un simple sistema dinámico de masa de resorte en un robot. Tiene muchas propiedades útiles, como eficiencia, confiabilidad y flexibilidad, y llega al final de la caminata. Es hora de crear el próximo robot.
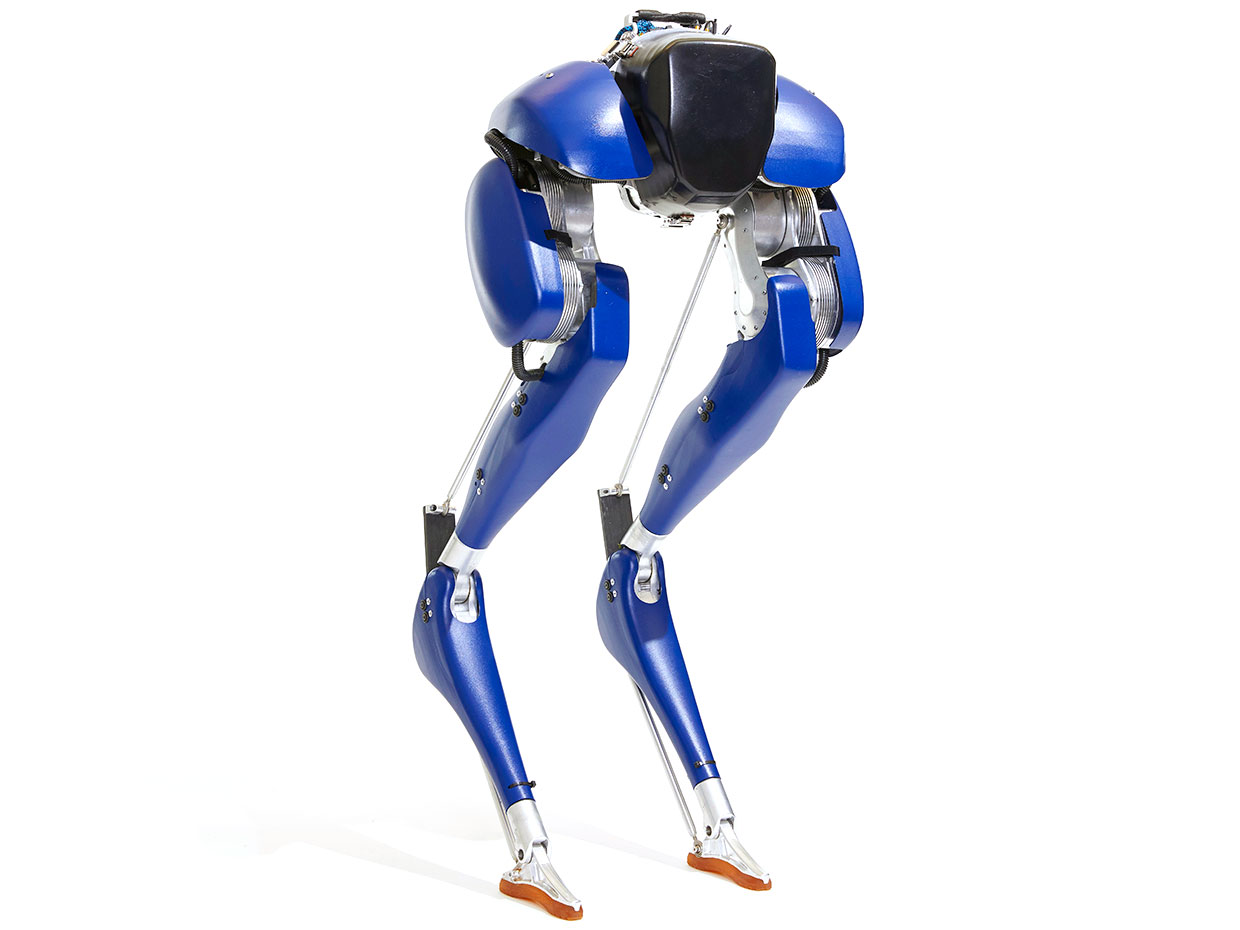 Cassie usa cinco motores y dos resortes en cada pierna para moverse por terrenos difíciles.
Cassie usa cinco motores y dos resortes en cada pierna para moverse por terrenos difíciles.Cassie, como ATRIAS, es un robot dinámico que camina. Hemos optimizado todos los aspectos de su diseño para crear un robot confiable y capaz adecuado para la comercialización. Y pusimos el listón alto: queríamos que Cassie pudiera correr por el bosque, caminar sobre terreno accidentado y trabajar durante varias horas con la batería sin una suspensión de soporte.
Cassie se basa en los mismos conceptos que se usaron para ATRIAS, pero decidimos hacer sus nuevas piernas. Anteriormente, utilizamos dos motores para alimentar cada cuatro enlaces en cada pata. Tal esquema minimiza su masa, pero hay un inconveniente: mientras camina, un motor desaceleró al otro, lo que provocó pérdidas de energía. Mientras trabajábamos en Cassie,
estudiamos otras configuraciones de piernas para eliminar este efecto. El nuevo esquema le permite hacer motores más pequeños, y el robot se ha vuelto aún más eficiente que ATRIAS.
Es importante tener en cuenta que la configuración de la pierna de Cassie fue el resultado de este análisis. El hecho de que el pie se parezca al pie de un avestruz u otro
terópodo puede indicar que estamos en el camino correcto, pero no buscamos crear un robot que, después de cubrirse con su plumaje, pudiera perderse en una bandada de emú.
Cada pierna de Cassie tiene cinco ejes de movimiento, o grados de libertad, hablando de manera robótica, y cada uno tiene su propio motor. Las caderas tienen tres grados de libertad, como la nuestra, lo que permite que la pierna gire en cualquier dirección. Otros dos motores tienen ejes en la rodilla y el pie. Cassie tiene grados adicionales de libertad en la parte inferior de la pierna y el tobillo; son pasivos y no están controlados por motores, sino que están unidos a resortes, lo que permite que el robot se mueva a través de terrenos difíciles, no sujetos a humanoides de pie plano.
Las nuevas piernas de Cassie requirieron la creación de un controlador de bajo nivel más sofisticado que el de ATRIAS. ATRIAS extendió su pata, simplemente aplicando la misma fuerza y opuesta en la dirección de torque de ambos motores. Con Cassie, mover las piernas en cierta dirección requiere calcular diferentes pares para diferentes motores. Para hacer esto, el controlador debe tener en cuenta la inercia de las patas y la dinámica de los motores y cajas de cambios.
 El controlador Cassie usa pasos planificados y equilibrio dinámico
El controlador Cassie usa pasos planificados y equilibrio dinámicoSí, la tarea del controlador se ha vuelto más difícil, pero este método le permite caminar de manera más eficiente y usar una gama más amplia de comportamiento. Cassie puede caminar a velocidades de hasta 5 km / h utilizando uno de los primeros controladores. El consumo de energía varía de 100 vatios (de pie) a 300 vatios (en movimiento), y en una batería de iones de litio, puede funcionar durante 5 horas. Además, las nuevas piernas le permiten a Cassia maniobrar de una manera que ATRIAS no podría. Y gracias al motor en la articulación del pie, puede pararse sin la necesidad de moverse constantemente, como lo hizo ATRIAS.
Cassie también pesa solo 31 kg, dos veces menos que ATRIAS. Dos Cassie se pueden cargar en la cajuela de un automóvil en menos de un minuto. También es más confiable: sus partes están hechas de aluminio y fibra de carbono, y la funda protectora está hecha de plástico acrílico-cloruro de polivinilo duradero, lo protege de colisiones y caídas.
Hasta ahora, Cassie no sabe cómo correr por el bosque. Pero la condujimos afuera sin seguro, y ella camina por el suelo, hierba y hojas caídas. Ahora estamos estudiando la cuestión de integrar el comportamiento dinámico de un robot con
la planificación del movimiento , lo que le permite, por ejemplo, subir escaleras. También estamos trabajando en otra función que hará que los robots tipo Cassie sean más útiles: las manos.
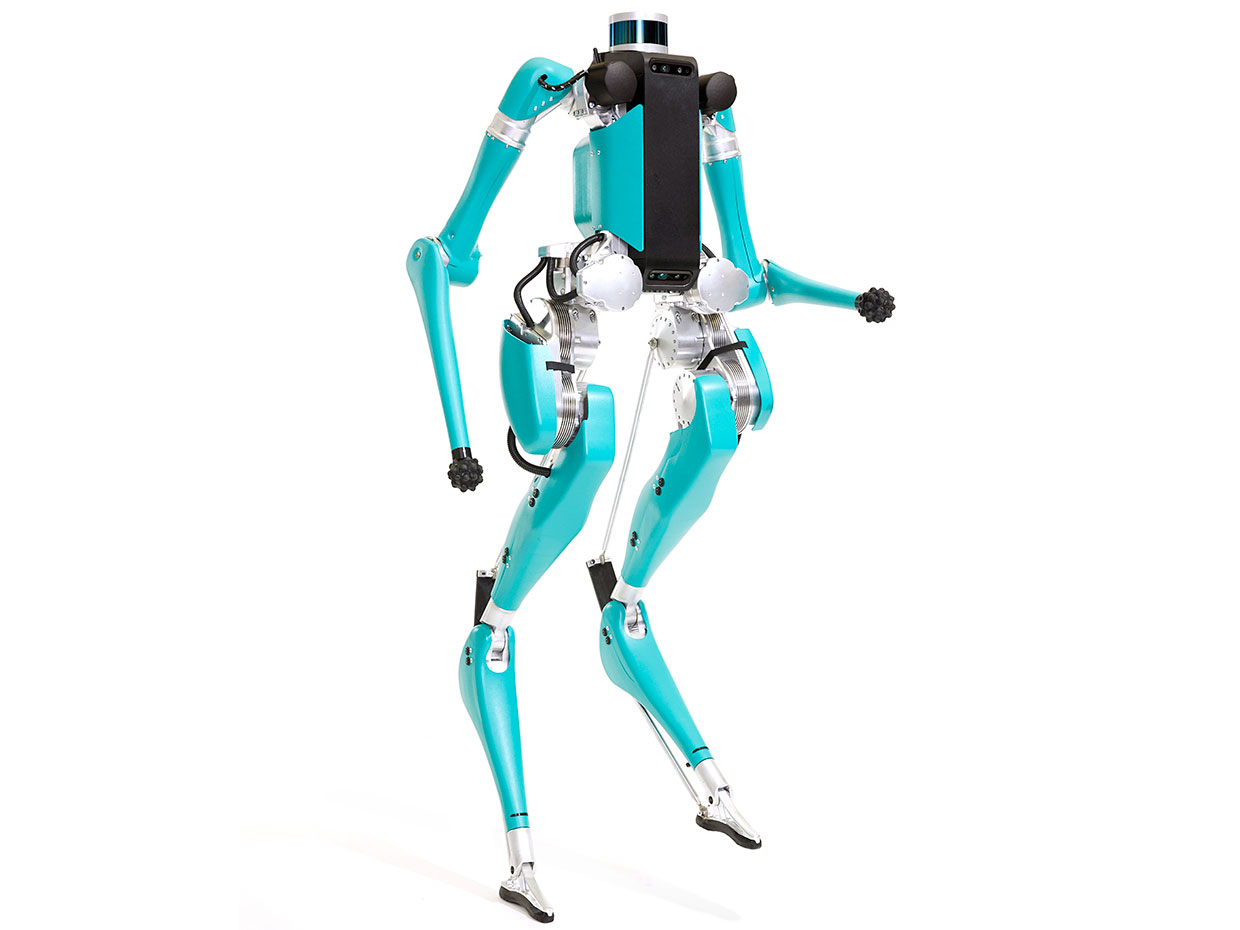 Digit tiene piernas, como Cassie, pero también tiene un cuerpo con sensores dentro y un par de manos que lo ayudan con la movilidad y el equilibrio.
Digit tiene piernas, como Cassie, pero también tiene un cuerpo con sensores dentro y un par de manos que lo ayudan con la movilidad y el equilibrio.Digit es un descendiente directo de Cassie. Tiene piernas similares, pero agregamos un torso con sensores en el interior y un par de manos. Están especialmente diseñados para ayudarlo con la movilidad y el equilibrio, y se balancean de acuerdo con la marcha. También permiten que Digit se sostenga en la caída y reoriente su cuerpo para ponerse de pie.
Digit tiene algo más que Cassie no tiene: percepción incorporada. Le agregamos muchos sensores, incluido lidar en la parte superior del cuerpo. Los sensores lo ayudan a recopilar datos, lo que permite que el robot se mueva en un mundo lleno de obstáculos, por ejemplo, en habitaciones y pasos desordenados, y confíe en una dinámica estable solo en situaciones inesperadas y con errores del sensor.
Digit, y el robot con patas que le sigue, tiene mucho que aprender. Pero estamos convencidos de que cambiarán el mundo. Su influencia se puede comparar con los automóviles en términos de cambiar el estilo de vida de las personas, los patrones de tráfico y los esquemas urbanos, donde estos robots prometen transformar la logística y la entrega de paquetes.
En un futuro cercano, cuando habrá robomóviles, los fabricantes de automóviles y las compañías que brinden viajes conjuntos como Lyft y Uber tendrán sus propias flotas enormes de automóviles que transporten personas, y el tráfico máximo será en la hora pico, como hoy. Pero, ¿qué harán estos autos a altas horas de la noche y en la mitad del día? Puede que no estén inactivos, pero transporte paquetes desde almacenes automáticos hasta su puerta. Sin embargo, estos autos solo podrán llegar a la acera; es bastante difícil entregar un paquete a una puerta sin una persona. Y luego entran en juego robots andantes. Viajarán en tales autos y caminarán los últimos metros. Y aunque las ruedas y las alas pueden desempeñar algunos de estos roles, en un mundo diseñado para dos patas, ninguna otra plataforma para el movimiento será tan flexible como un robot sobre sus pies.
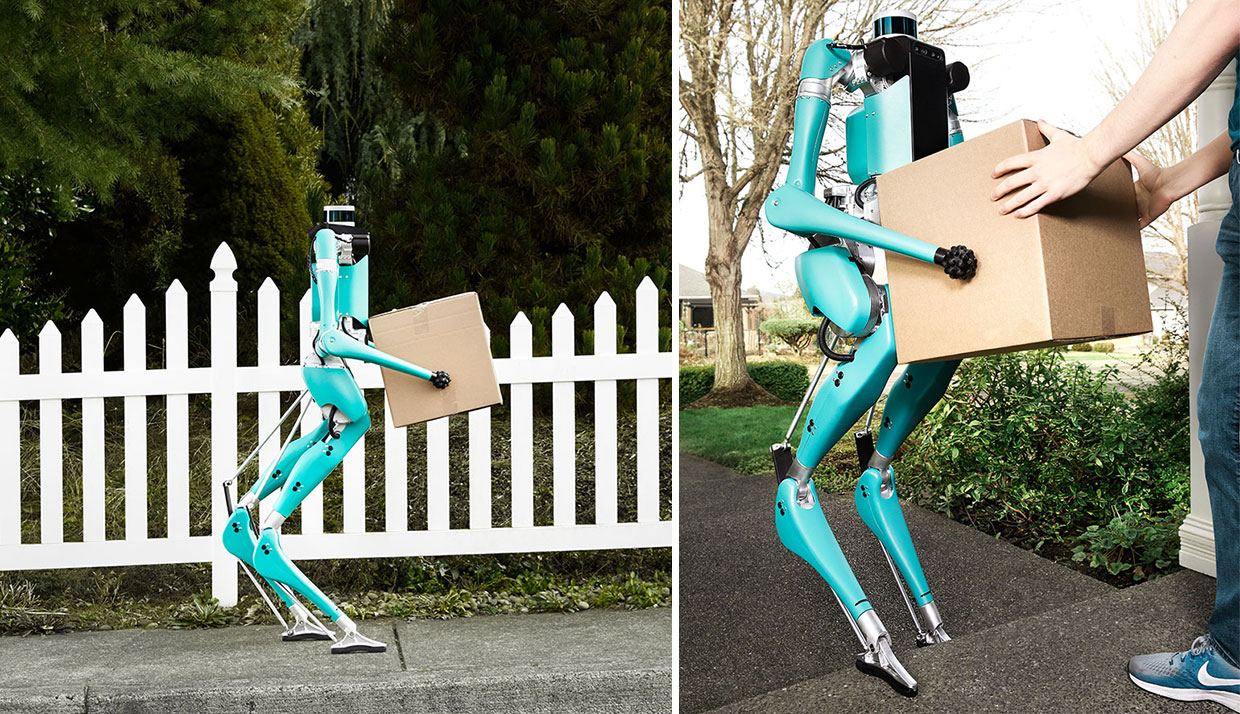 Digit aprende a caminar en diferentes terrenos y subir escaleras, para que un día pueda entregar paquetes directamente a la puerta
Digit aprende a caminar en diferentes terrenos y subir escaleras, para que un día pueda entregar paquetes directamente a la puertaLos robots de entrega formarán parte de un sistema logístico cada vez más automatizado, en el que los paquetes del fabricante se entregan inmediatamente a su puerta. Este sistema reducirá el costo de entrega, de modo que la entrega de paquetes será más barata que comprarlos en grandes almacenes bien iluminados, con calefacción y acceso humano. Las pequeñas tiendas mayoristas serán innecesarias. Las personas, por supuesto, podrán disfrutar comprando algunas cosas. Pero los productos diarios serán entregados por robots, lo que le ahorrará tiempo y dinero.
Los robots bípedos podrán penetrar en nuestros hogares y oficinas. Pueden subir escaleras y en habitaciones llenas de gente, interactuar con personas a un nivel de visión seguro y a escala humana, lo que nos permitirá envejecer adecuadamente en nuestros hogares. Ayudarán a transportar cosas y funcionarán como dispositivos de presencia remota, lo que permitirá a los familiares y amigos usar el robot para comunicarse con las personas de forma remota y hacerles compañía.
Los robots en pie podrán llegar a lugares donde las personas son peligrosas. Se lanzarán en paracaídas en incendios forestales para recopilar datos en tiempo real, se encontrarán con edificios en llamas en busca de residentes y entrarán en áreas de desastre como la planta de energía nuclear de Fukushima, explorando áreas de difícil acceso. Inspeccionarán regularmente el interior de las centrales hidroeléctricas y las minas abandonadas para que no tengamos que hacerlo.
Para entrar en este futuro, necesitamos resolver muchos problemas. Pero estoy convencido de que la comunidad de robótica puede hacer que esta tecnología sea práctica. Este será un pequeño paso para el robot y un gran salto para toda la humanidad.