¡Cómo pasa el tiempo! El cuarto mes terrestre de trabajo en el otro lado de la luna del módulo de aterrizaje Chang'e-4 y el rover Yutu-2 ya ha llegado. Los dispositivos sobrevivieron a un período de temperatura extremadamente baja en la tercera noche iluminada por la luna, ahora han salido del modo de suspensión y han comenzado nuevos estudios de la superficie lunar y el espacio exterior.
¿Qué cámaras están instaladas en el módulo Chang'e-4 y el rover Yutu-2, y qué toman las cámaras en los largos días lunares?
Materiales publicados anteriormente sobre la misión Chang'e-4: En este momento, han pasado 88 días (2212 horas) desde el aterrizaje del rover Yutu-2 en la superficie lunar y 115 días (2760 horas) después del lanzamiento del rover Yutu-2 desde el cosmodromo Sichan como parte de la misión Chang'e-4 a la Luna.
Cuarto día lunar en el otro lado de la luna:
La duración prevista del módulo de aterrizaje es de un año, el rover: tres meses.
De hecho, el rover Yutu-2 ya ha alcanzado su vida útil estimada de 2160 horas.
Este no es un récord para las misiones lunares Chang'e, el primer módulo de aterrizaje Chang'e-3, que ha estado en la parte visible de la Luna desde diciembre de 2013, todavía muestra signos de vida (telemetría y datos de varios instrumentos), pero su compañero el aterrizaje - el primer rover "Yutu", aunque perdió movilidad 40 días después del inicio del trabajo productivo en la superficie lunar, hasta mediados de 2016, transfirió datos al MCC en modo estacionario.
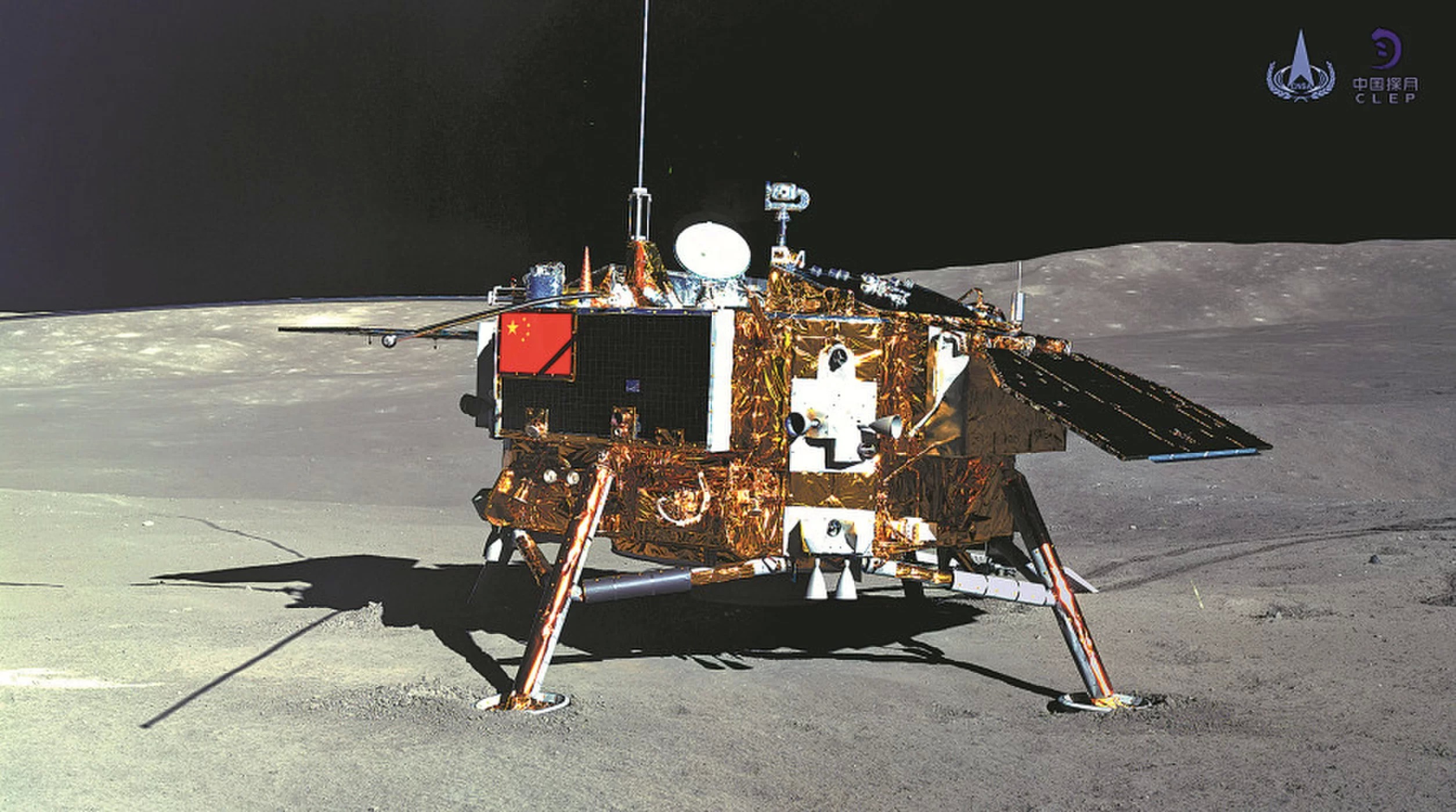
Datos sobre los módulos de la misión lunar "Chang'e-4":- Módulo de descenso "Chang'e-4" (4,4 metros entre soportes de aterrizaje opuestos, peso 1200 kg.);
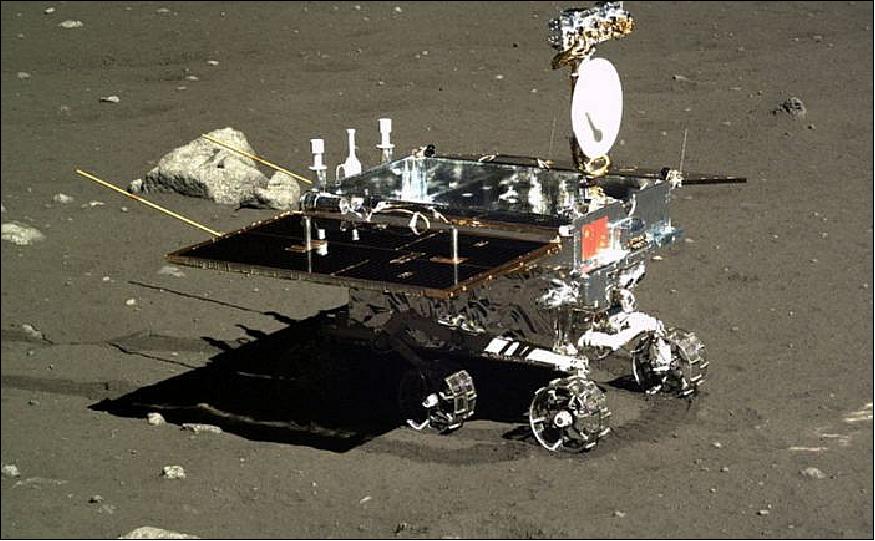
- Yutu-2 rover (altura 1 metro, ancho 1 metro (sin paneles solares), 1,5 metros de longitud, dos paneles solares plegables, seis ruedas, peso 140 kg.).
 Nuevas fotos desde el fondo de la luna
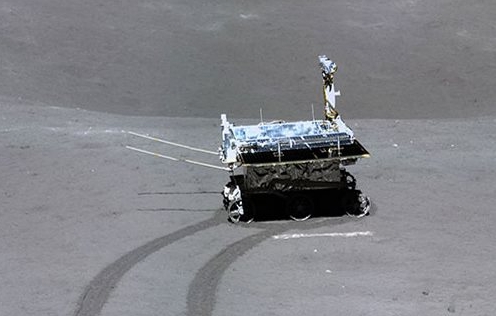
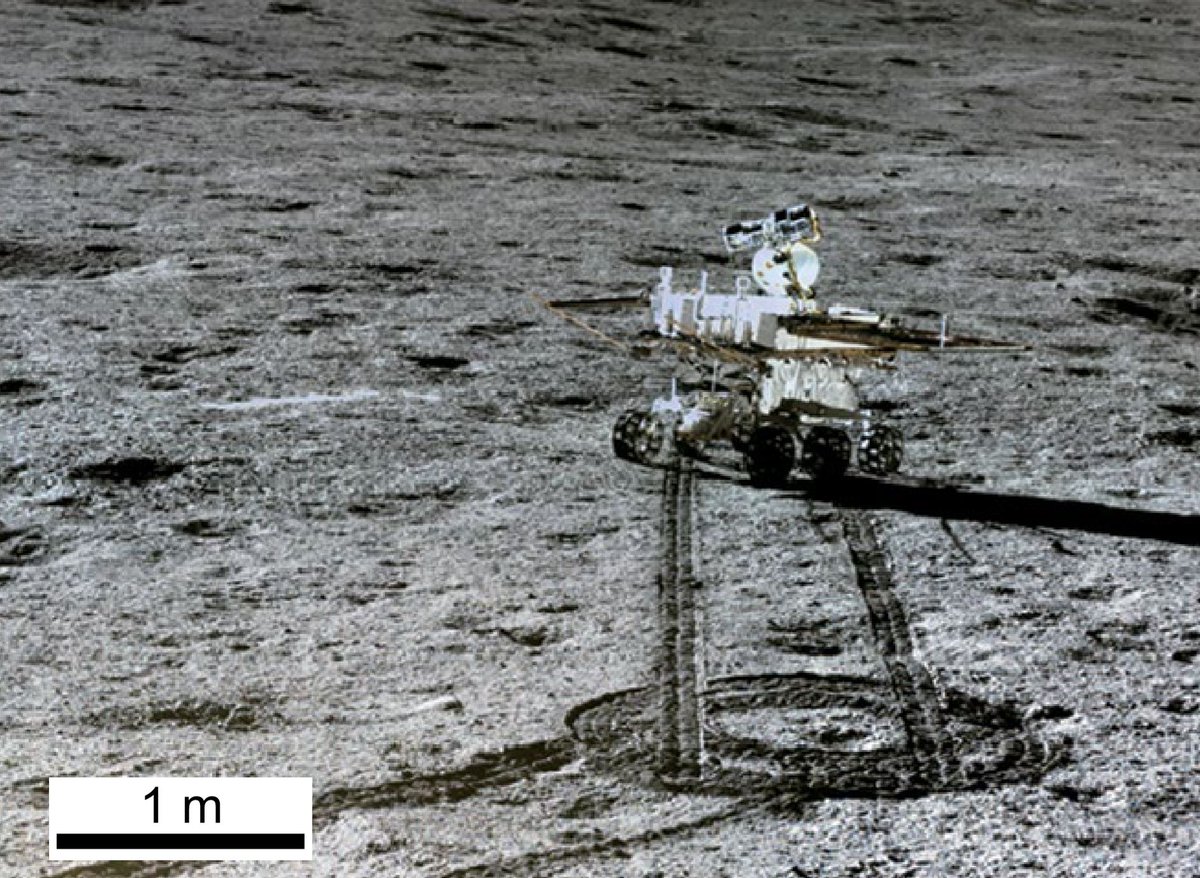
Nuevas fotos desde el fondo de la lunaLa trayectoria lunar desde las ruedas del rover Yutu-2 y la sombra desde la antena y la plataforma con una cámara panorámica:

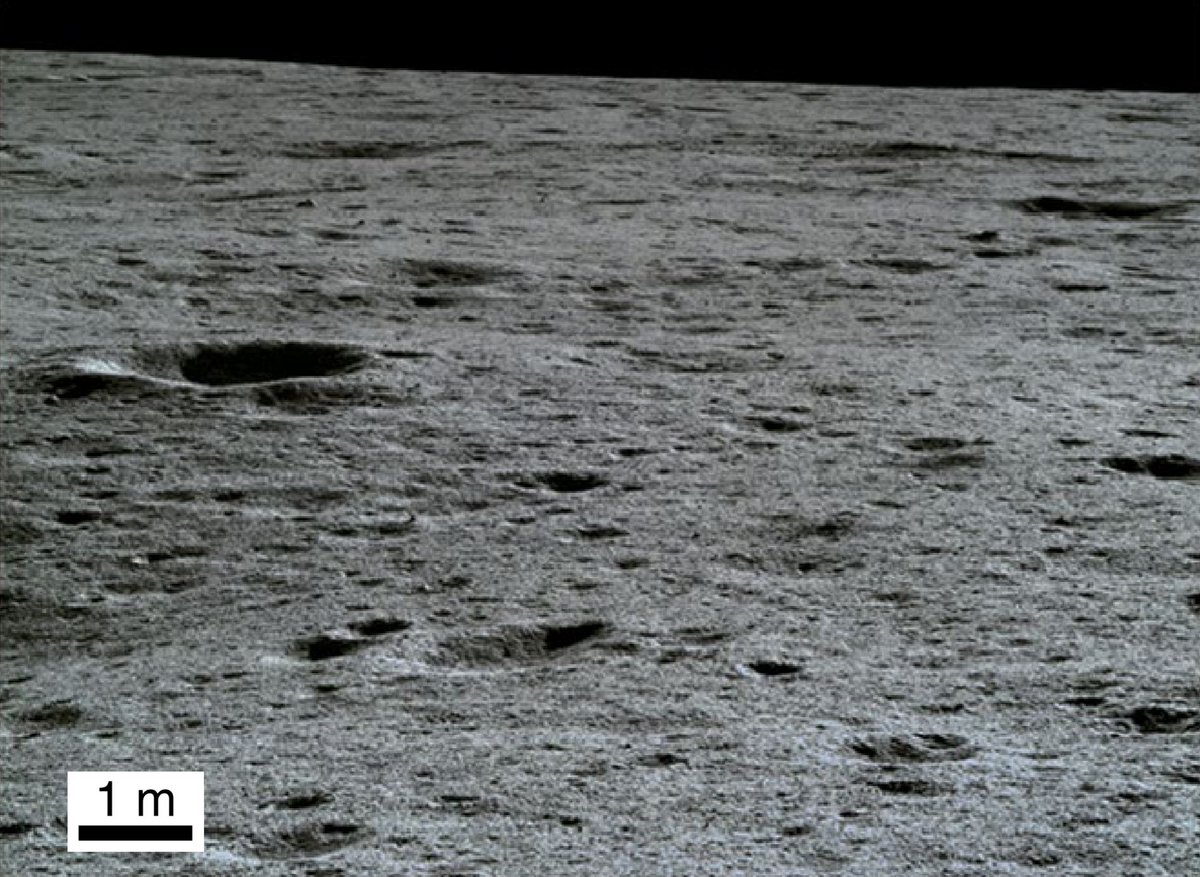
Varios cráteres (con hermosas sombras) y montañas en el fondo:

Y estas son fotos del artículo científico "Lunar farside para ser explorado por Chang'e-4" de la edición de abril de Nature Geoscience.

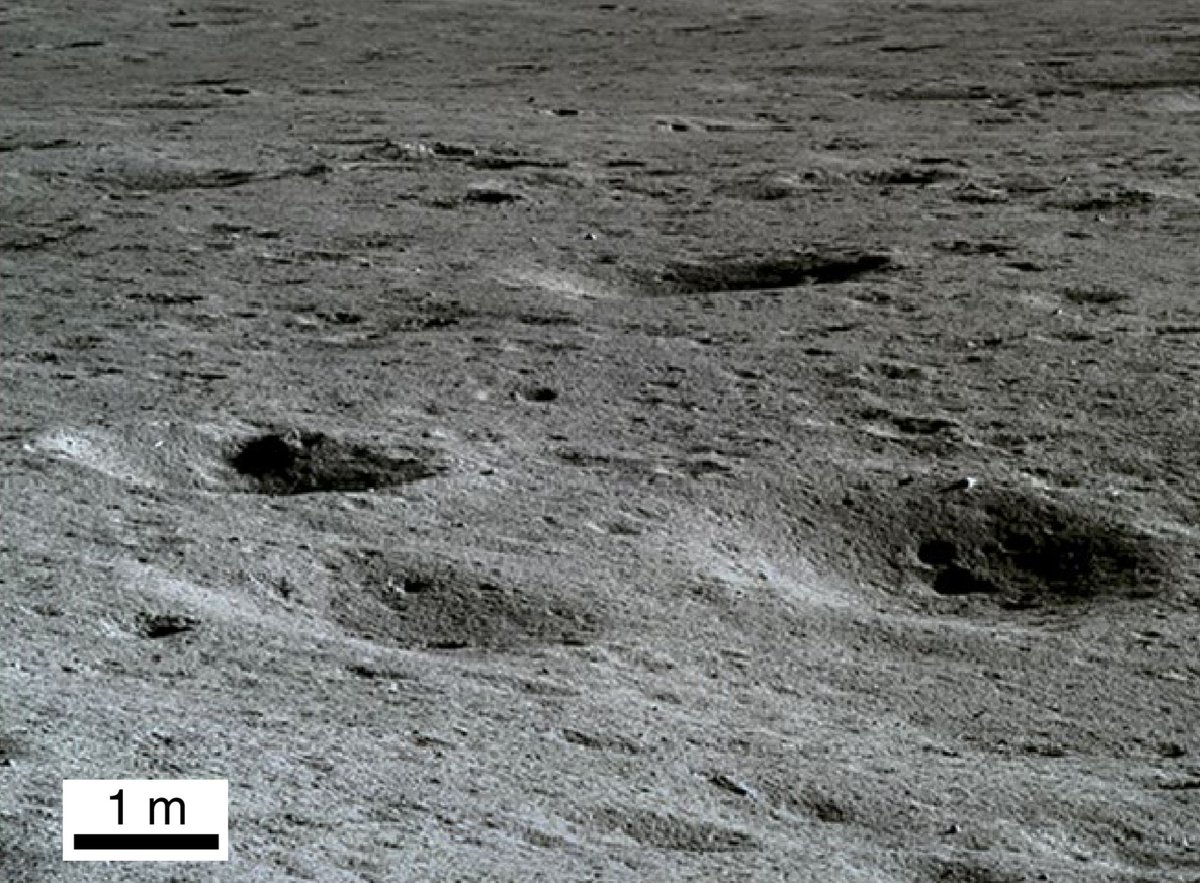
Pequeños cráteres cerca del lugar de aterrizaje:
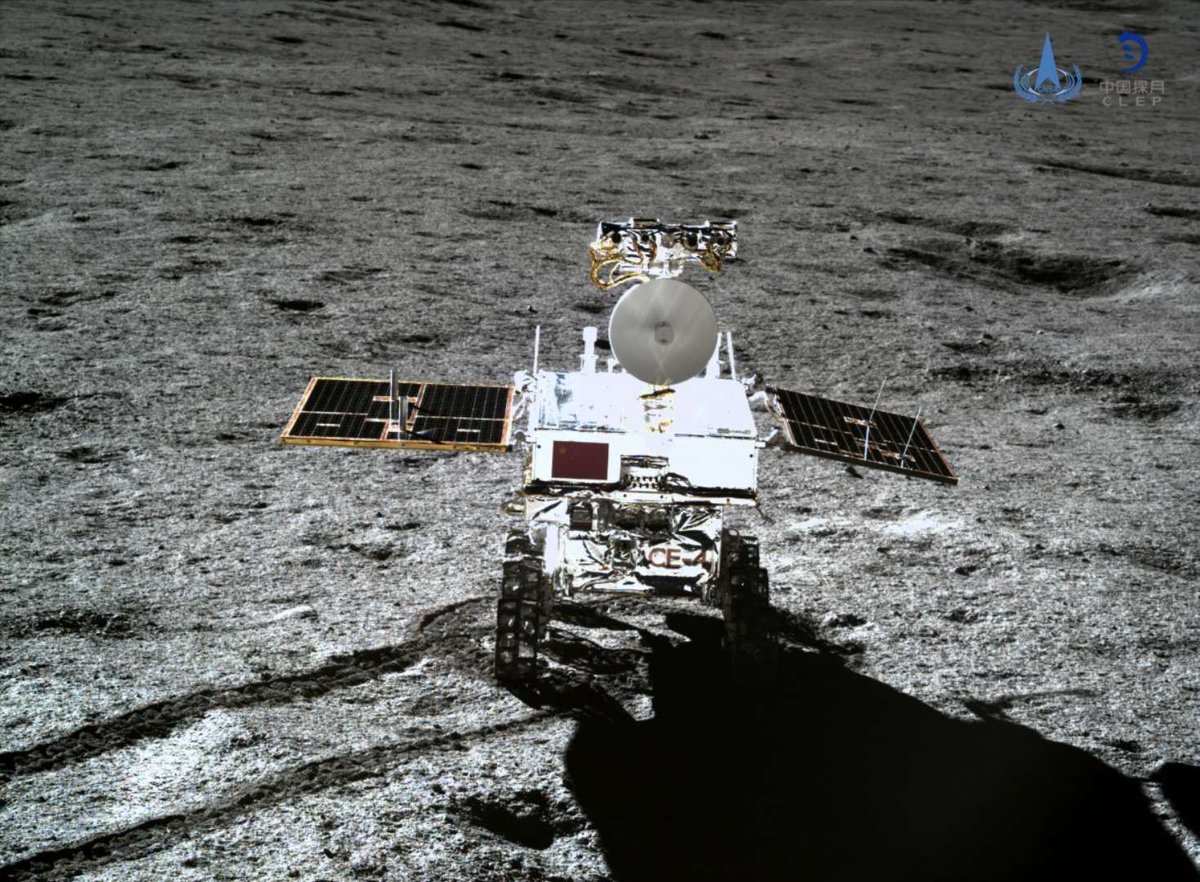
Rover "Yutu-2" explora la superficie de la luna:
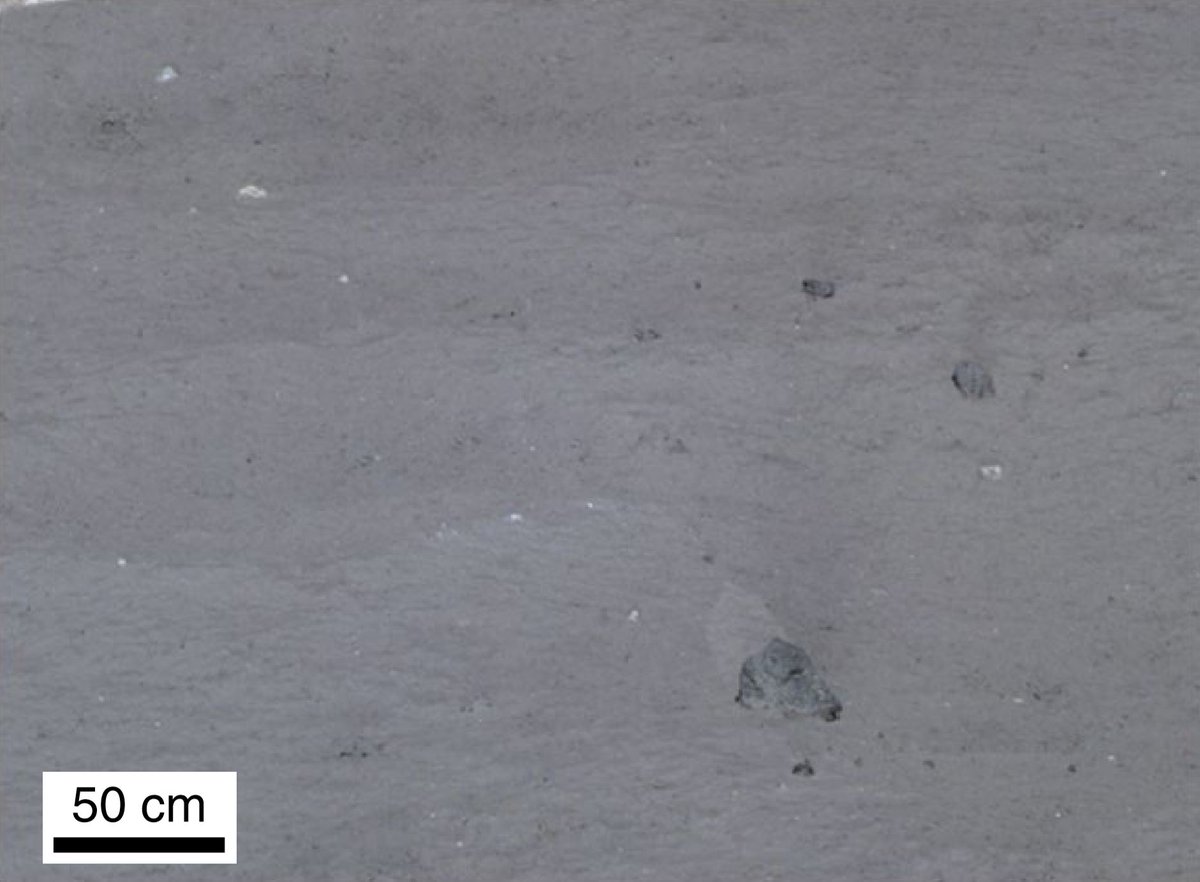
Fragmentos de piedras en pequeños cráteres (foto del rover Yutu-2):
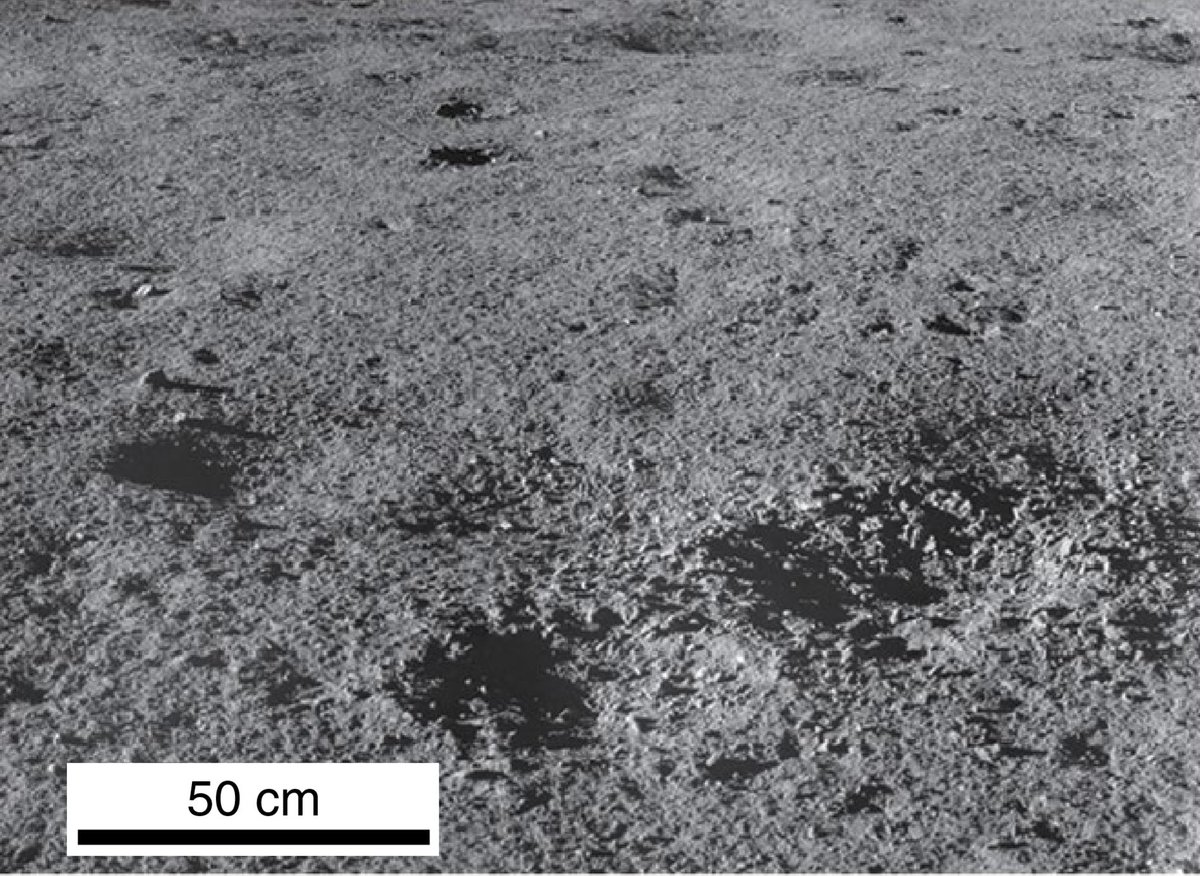
Pequeñas piedras a lo largo del rover Yutu-2:

Piedras oscuras muy inusuales cerca del lugar de aterrizaje:
 ¿Qué cámaras están instaladas en el módulo Chang'e-4 y el rover Yutu-2?Se instalan dos cámaras en el módulo de aterrizaje Chang'e-4:
¿Qué cámaras están instaladas en el módulo Chang'e-4 y el rover Yutu-2?Se instalan dos cámaras en el módulo de aterrizaje Chang'e-4:
- cámara de aterrizaje (cámara de aterrizaje - LCAM);
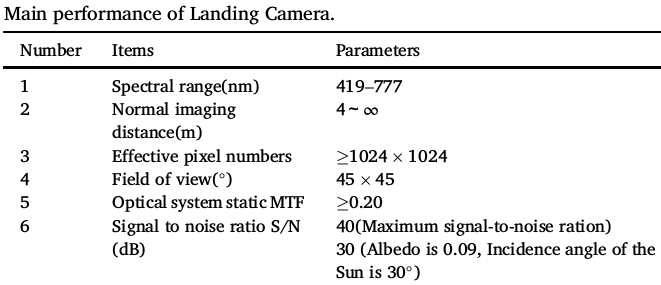
- cámara de paisaje (cámara de terreno - TCAM).La cámara de aterrizaje LCAM (0.5 kg, tamaño 116x100x70.4 mm) se instaló en la parte inferior del módulo Chang'e-4, se encendió automáticamente a una altitud de 12 km sobre la superficie lunar para registrar el procedimiento de aterrizaje con una resolución de 1024x1024 píxeles, 10 cuadros por segundo.
Video del procedimiento de aterrizaje desde la cámara LCAM: se recopilan varios miles de fotogramas en un video
Características de la cámara de aterrizaje LCAM:
El diagrama de circuito de los elementos de la cámara de aterrizaje LCAM:
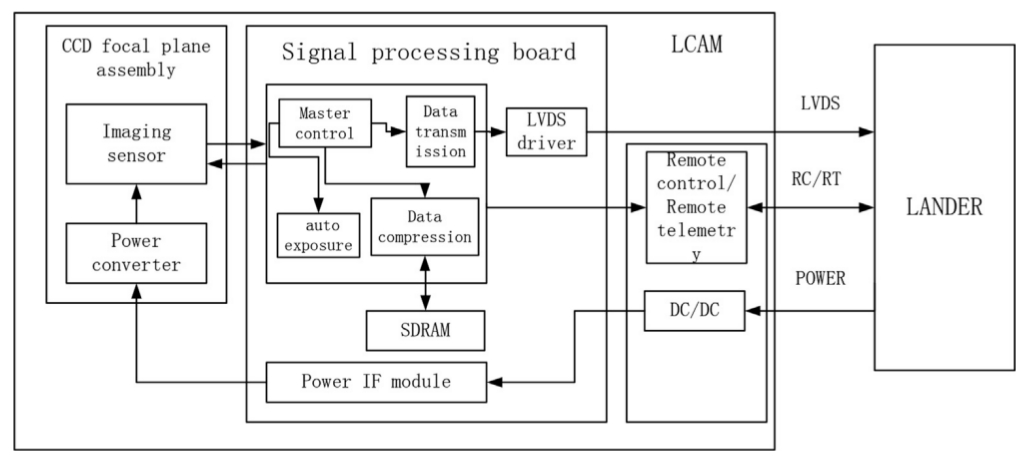
Los datos se transmiten utilizando la interfaz LVDS (Señalización diferencial de bajo voltaje).
Después de aterrizar en la luna, la cámara LCAM captura solo el mismo cuadro con el soporte de aterrizaje:

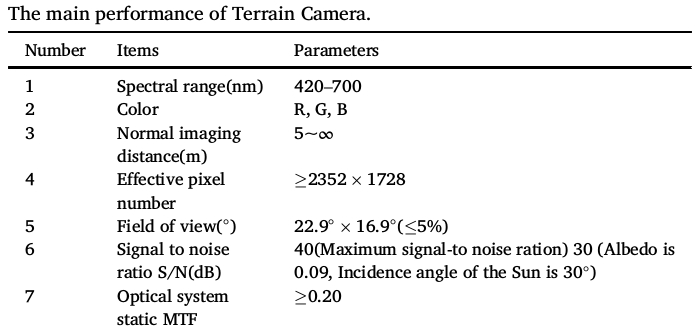
La cámara de paisaje TCAM (0,64 kg, tamaño 92x105x118,9 mm) se instala en el punto más alto del módulo de aterrizaje Chang'e-4 en un soporte especial que permite que la cámara gire 360 grados alrededor de su eje y puede inclinar la cámara hacia arriba o hacia abajo en un ángulo de hasta 120 grados Las fotografías panorámicas de la superficie y los elementos del módulo de aterrizaje, el seguimiento del rover y la exploración del área alrededor de la zona de aterrizaje son funciones TCAM.
Características de la cámara de paisaje TCAM:
El esquema de comunicación de los elementos de la cámara de paisaje TCAM:
Panorama del lugar de aterrizaje:

Cámaras LCAM y TCAM en el módulo de aterrizaje:

El módulo de aterrizaje Chang'e-4 funciona en modo estacionario y sus fotografías de la superficie en la zona de aterrizaje son, en primer lugar, muy importantes para comprender qué tipos de superficies están realmente alrededor del módulo. Después de todo, hay una gran cantidad de pequeños cráteres y piedras, y pueden interferir (en el peor de los casos) con el procedimiento para bajar el rover. Desde después de aterrizar, el módulo Chang'e-4 no puede cambiar su posición y hacer un "salto" a otra zona que sea más conveniente para aterrizar.
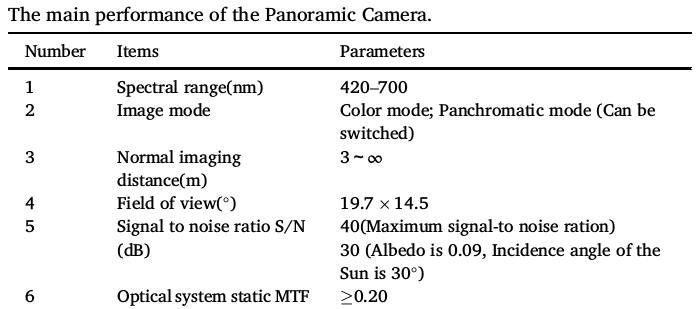
El rover Yutu-2 tiene una cámara panorámica doble (cámara panorámica - PCAM).La cámara PCAM panorámica (0,69 kg, tamaño 90x110x120 mm) se instala en el punto más alto del rover Yutu-2 en un soporte de mástil ancho especial, que permite que la cámara gire 360 grados alrededor de su eje para capturar fotos de vistas panorámicas de la superficie.
Dado que la cámara consta de dos módulos idénticos, se utilizan para componer una imagen 3D utilizando el método de imagen estéreo binocular. Para obtener una imagen en color en una cámara PCAM, se utiliza un filtro Bayer (conjuntos de filtros de color).
Características de la cámara panorámica PCAM:
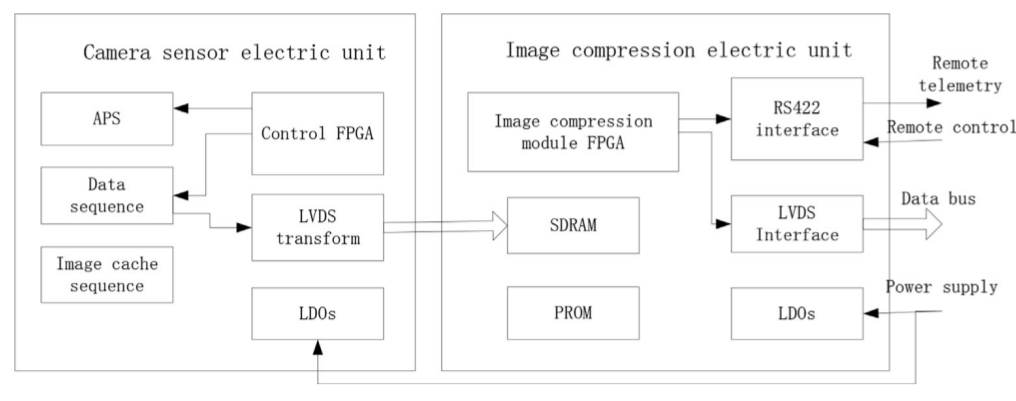
El esquema de comunicación de los elementos de la cámara panorámica PCAM:

Vista general del panorama de la superficie desde el rover Yutu-2:

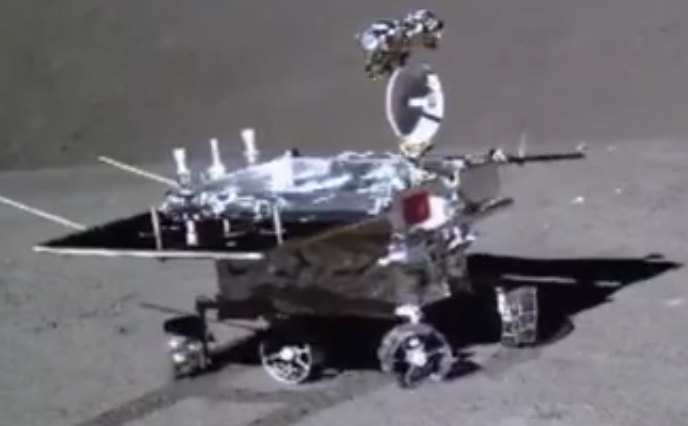
Cámara PCAM en el móvil:

El 3 de enero de 2019, después de que se completaron todas las etapas del exitoso procedimiento de aterrizaje y la instalación de canales de comunicación independientes con dispositivos Chang'e-4 (el módulo de aterrizaje y el rover), comenzó la era de una foto del estudio del otro lado de la luna.
Fotos de cámaras:Cámara de aterrizaje LCAM: Cámara panorámica PCAM (móvil): El rover Yutu-2 es un compañero espacial móvil y altamente productivo del módulo de aterrizaje Chang'e-4.
El rover Yutu-2 condujo más de 160 metros a lo largo de la superficie compleja del otro lado de la luna.
La ruta del rover Yutu-2 en tres días lunares:


Es interesante cómo funcionan las ruedas delanteras en el rover Yutu-2 al girar en su lugar:

Video del lanzamiento del rover "Yutu-2"
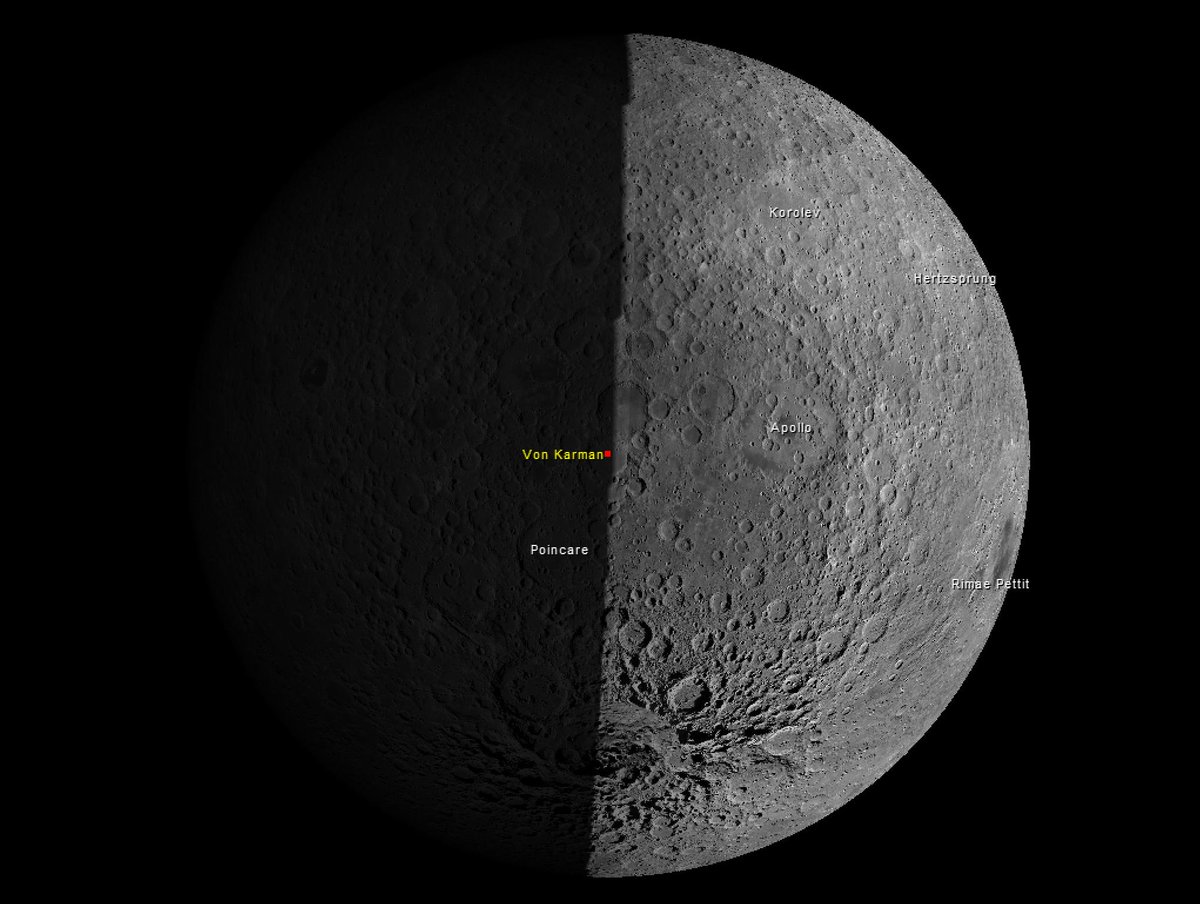
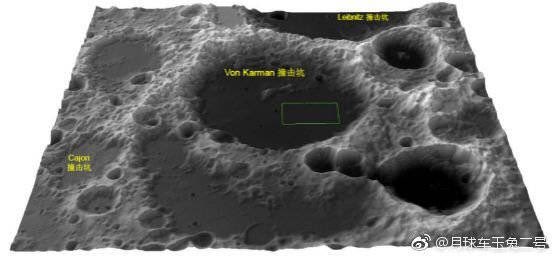
El lugar de aterrizaje de la misión Chang'e-4: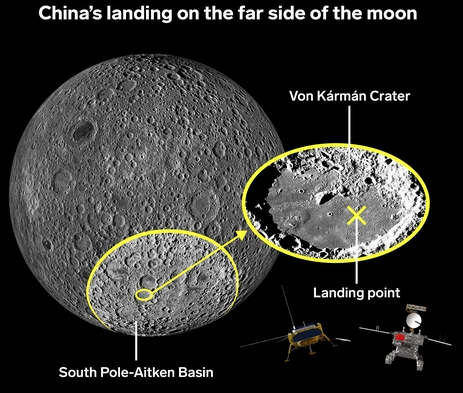
Dado que el reverso de la luna también tiene un relieve más complejo que el lado visible desde la Tierra, en el proceso de moverse a lo largo de la superficie, el rover Yutu-2 encontró problemas motores e interferencias más serios, en comparación con los encontrados previamente por su predecesor, el rover Yutu ", enviado a la superficie lunar en diciembre de 2013.
Desafortunadamente, el primer rover Yutu de la misión Chang'e-3, el 25 de enero de 2014, fue inmovilizado técnicamente (daños a los elementos como resultado de una colisión) después de superar 114.8 metros en una superficie lunar compleja.
La superficie lunar en la zona de aterrizaje del módulo de aterrizaje Chang'e-4 está repleta de pliegues, numerosos guijarros y pequeños cráteres, después de realizar cada uno de sus pequeños movimientos, el rover Yutu-2 debería detenerse, fotografiar la superficie y enviar estos datos a la Tierra por satélite. repetidor
Los científicos, operadores en el CCM e ingenieros en la Tierra luego procesan estos datos y trazan una ruta adicional a lo largo de la cual seguirá el rover Yutu-2.
Las antenas móviles Yutu-2 deben configurarse de modo que apunten a un satélite repetidor para enviar y recibir correctamente señales de control, mientras que los paneles solares del móvil deben estar inclinados de manera óptima para recibir una gran cantidad de luz solar para maximizar la salida electricidad en el momento de la transferencia de datos.
 Rover de seis ruedas "Yutu-2":
Rover de seis ruedas "Yutu-2":- el peso total del vehículo es de aproximadamente 140 kg (310 libras);
- capacidad de carga de aproximadamente 20 kg (44 lbs);
- puede moverse en pendientes y tiene sensores automáticos para evitar colisiones con otros objetos;
- El rover recibe electricidad por medio de dos paneles solares, lo que le permite trabajar durante un día lunar;
- velocidad máxima de 200 metros por hora (todavía no se puede alcanzar esta velocidad en la Luna, ya que los elementos en la superficie no permitirán acelerar y dañar el vehículo antes);
- El área máxima de investigación es de 3 metros cuadrados. km;
- Tiempo estimado de trabajo: 3 meses (2160 horas);
- distancia máxima estimada - 10 km.
Los elementos de la rueda del rover Yutu-2 son de hecho su característica de diseño complejo, que, en la etapa de diseño, tuvo que ser desarrollado por los ingenieros de la Academia China de Tecnología Espacial. Se negaron a usar las pistas porque resultaron ser menos mantenibles y vulnerables en las pruebas.
Por ejemplo, si una piedra pequeña ingresa al mecanismo de seguimiento, el rover puede atascarse y perder el seguimiento. A diferencia de la implementación con ruedas, que es más confiable y tiene un mayor recurso, también puede mover piedras con seguridad hasta 20 centímetros de altura.

Sin embargo, si el rover Yutu-2 se da vuelta, no podrá volver a su posición de trabajo nuevamente. Los paneles solares a los lados del vehículo lunar son muy frágiles, pueden romperse o volverse polvorientos después de caerse, lo que los hará inutilizables.

Por lo tanto, en el proceso de control remoto de los rovers, es necesario concentrarse en mantener la posición del rover Yutu-2 lo más estable posible y no dejar que se caiga al moverse por la superficie.
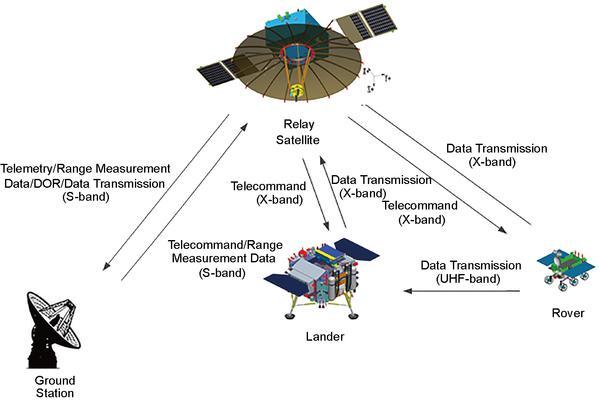
Pero, ¿cómo se pueden controlar todas estas cámaras en el módulo de aterrizaje Chang'e-4 y el rover Yutu-2, transmitir datos y recibir energía?Acerca de los controladores a bordo y el sistema de suministro de energía del módulo de aterrizaje y el móvil.El módulo de aterrizaje Chang'e-4 y el rover Yutu-2 tienen en su tablero controladores especiales de carga útil, que se utilizan para recibir, almacenar y controlar datos científicos provenientes de diferentes módulos y elementos de dispositivos.
Además, los datos de las señales de control, datos científicos y fotográficos que utilizan las interfaces RS-422 (telemetría y control) y LVDS (datos científicos) se transmiten a los controladores centrales del módulo de aterrizaje y el móvil, que los transmiten a través del sistema de comunicación al CCM en la Tierra utilizando un satélite repetidor "Tseyuqiao".
Los controladores de carga útil del módulo de aterrizaje Chang'e-4 y el rover Yutu-2 están equipados con un procesador central y matrices FPGA.
Además, con la ayuda de los elementos del controlador de carga útil, el voltaje incorporado + 28V se convierte en el voltaje para las fuentes de alimentación secundarias + 5V, + -15V, + 3.3V, así como el monitoreo constante de los valores de voltaje y temperatura de los módulos del controlador y dispositivos externos.
Como microprocesador se utiliza lo siguiente: ATMEL AT697F (procesador Rad-Hard de 32 bits SPARC V8).
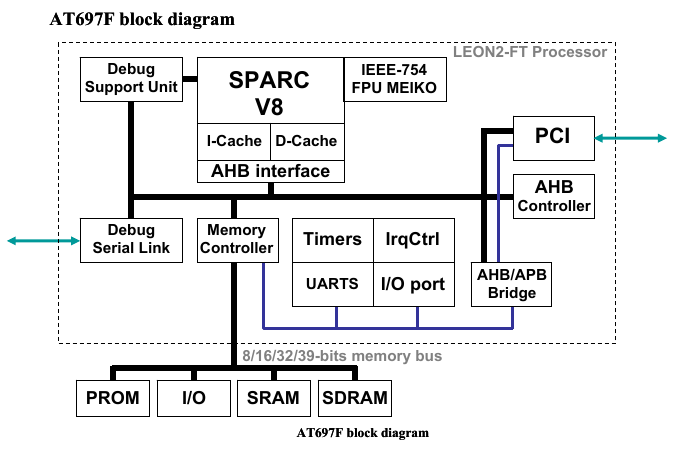
Como circuitos integrados lógicos programables (FPGA / FPGA) se utilizan: un conjunto de seis XILINX XQR2V3000-4CCG717 (FPGA QPro Virtex-II endurecido por radiación).
Para una protección adicional del microcircuito contra la radiación, se utilizan pantallas de aluminio con un espesor de al menos 3,8 mm.
Esquemas de comunicación y transmisión de datos de equipos en el módulo de aterrizaje Chang'e-4: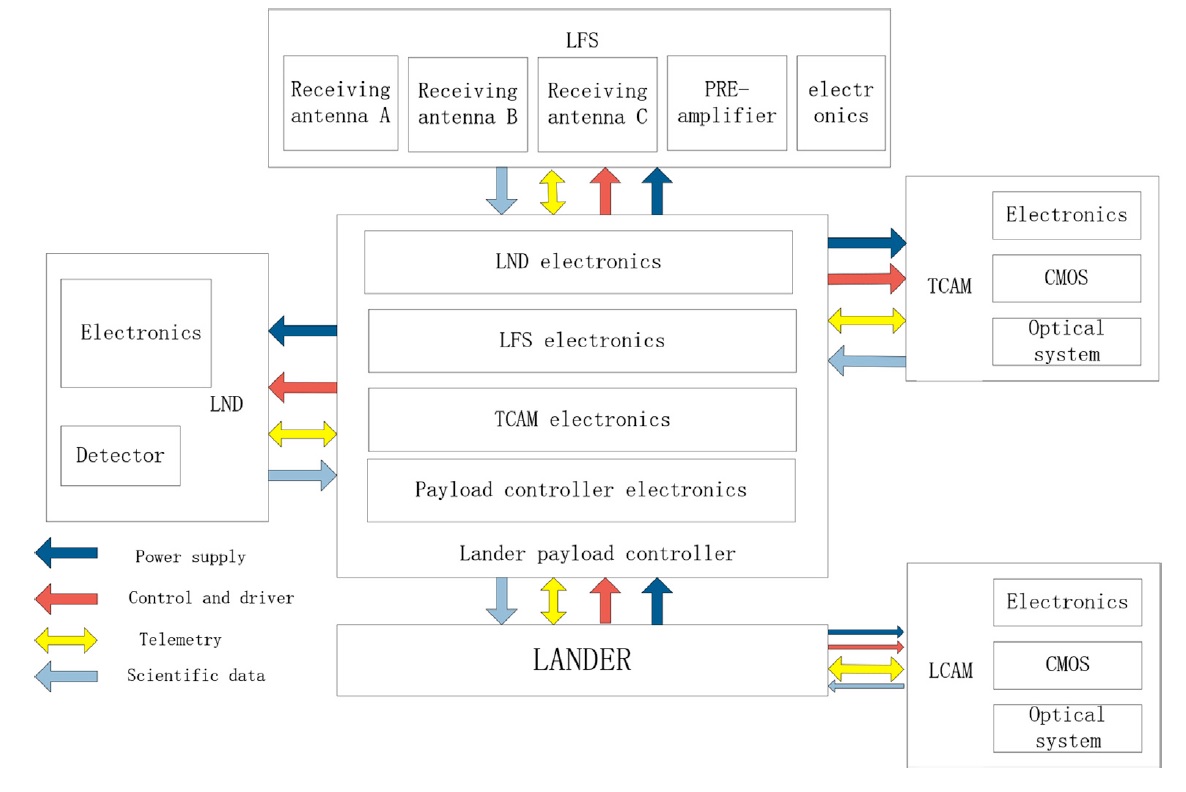
donde:
- LFS - Espectrómetro de baja frecuencia;
- LND - Neutrones y dosimetría del módulo lunar;
- TCAM - Cámara de terreno;
- LCAM - Cámara de aterrizaje.
Esquemas de comunicación y transmisión de datos de equipos en el rover Yutu-2: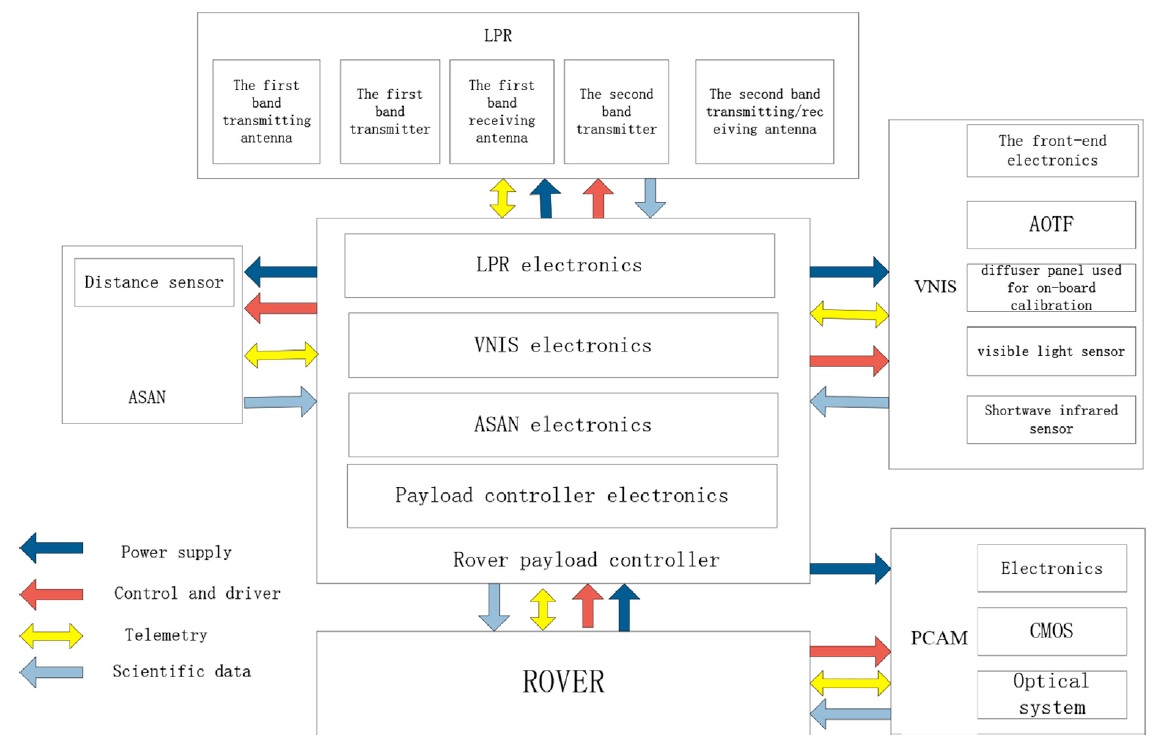
donde:
- LPR - Radar penetrante lunar;
- ASAN - Analizador pequeño avanzado para neutros;
- VNIS - Espectrómetro de imágenes visible e infrarrojo cercano;
- PCAM - Cámara panorámica.
Por cierto, anteriormente en las publicaciones ya hablé sobre casi todo el equipo científico del
módulo de lanzamiento y el
rover , solo un dispositivo científico permaneció de incógnito - LPR (radar de penetración lunar) - que se puede ver externamente, como dos "antenas" detrás del rover.
Intentaré escribir sobre este interesante dispositivo una publicación separada.