
En el mundo de la robótica, se ha desarrollado un marco de software durante mucho tiempo y con éxito que le permite prototipar rápidamente los sistemas robóticos: Robot Operating System (ROS). Nosotros en el Laboratorio de Robótica de Sberbank lo estamos utilizando activamente en el desarrollo de nuestros propios proyectos. Habiendo adquirido cierta experiencia y señalando que todavía no ha habido una sola reunión práctica sobre ROS en Rusia, decidimos organizarla y compartir nuestro conocimiento, y al mismo tiempo conocer a la comunidad de robótica. ROS Russian Meetup 2019 se llevará a cabo en Skolkovo como parte del Foro Skolkovo Robotics 2019 el 16 de abril, esta es una oportunidad para que los desarrolladores de ROS y la robótica de todos los niveles dediquen un día a un intercambio en vivo de experiencia y comunicación con la comunidad. Si está familiarizado con ROS, puede ir de forma segura al
formulario de registro , el programa y la información de la organización también se colocan allí. En la reunión, discutiremos la historia de ROS y los principios de la comunidad, dedicaremos mucho tiempo a informes prácticos sobre SLAM y navegación lidar con láser en interiores, y un planificador de rutas de robots. Mostraremos cómo controlar los manipuladores industriales a través de ROS, cómo usar los datos del sensor, cómo trabajar con la máquina de estados SMACH. E incluso le diremos cómo instalar ROS sin problemas y comenzar a desarrollar un robot.
Por cierto, la participación en la reunión es gratuita, pero como el número de asientos es limitado, le pedimos que espere la confirmación. Y para aquellos que no están familiarizados con ROS, ofrecemos una pequeña descripción general.
 Visión bidimensional del mundo a través de los ojos de ROS
Visión bidimensional del mundo a través de los ojos de ROSRobot Operating System es un marco de software para robots que implementa los algoritmos básicos para construir robots complejos. Incluye un conjunto de herramientas, bibliotecas y estándares diseñados para simplificar la tarea de crear un comportamiento de robot complejo y confiable en una amplia variedad de plataformas robóticas.
La ideología principal del proyecto son los principios de código abierto, documentación de paquetes, reutilización de código y la comunidad global de robótica.
¿Por qué fue creado?
Crear un software robótico universal realmente confiable es difícil. Desde el punto de vista del robot, los problemas que parecen triviales para la persona resultan en la alta complejidad del desarrollador que programa el sistema robótico. Es tan difícil trabajar con estas tareas que a veces no es posible resolverlas solo o en un equipo pequeño.
Como resultado, ROS se creó desde cero para estimular el desarrollo de software colaborativo para la robótica. Por ejemplo, un laboratorio puede tener expertos de SLAM en interiores y puede ofrecer un sistema SLAM de clase mundial. Otro grupo podría tener expertos en el uso de SLAM para la navegación, y otro grupo podría desarrollar un enfoque de visión por computadora que funcione bien para reconocer objetos pequeños en un entorno desordenado. ROS fue diseñado específicamente para que dichos grupos colaboren y desarrollen el trabajo del otro.
Fondo corto
ROS es un gran proyecto con una historia y una gran cantidad de participantes. Muchas personas de la comunidad de investigación en robótica necesitaban un sistema de colaboración abierto, y se crearon muchos proyectos para este propósito.
A mediados de la década de 2000, la Universidad de Stanford realizó varios esfuerzos relacionados con el uso de IA en robótica, por ejemplo, el programa STanford AI Robot (STAIR) y el programa Personal Robots (PR) para crear prototipos personalizados de sistemas de software dinámico diseñados para su uso en robótica . En 2007, Willow Garage proporcionó recursos significativos para expandir aún más estos conceptos y crear prototipos. Los esfuerzos fueron apoyados por innumerables investigadores que compartieron su tiempo y experiencia para contribuir a las ideas básicas de ROS y a los principales paquetes de software. Todo el software se desarrolló utilizando la licencia de código abierto BSD y gradualmente se convirtió en una plataforma ampliamente utilizada en la comunidad de investigadores en robótica.
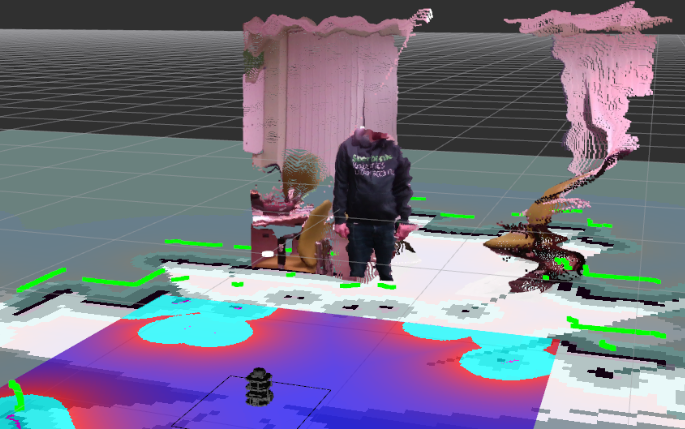 Visión del mundo tridimensional a través de los ojos de ROS
Visión del mundo tridimensional a través de los ojos de ROS
Comunidad mundial de ROS
Desde el principio, ROS se desarrolló en varias instituciones y para varios robots, incluidas muchas instituciones que recibieron robots PR2 de Willow Garage. Aunque sería mucho más fácil para todos los participantes alojar su código en los mismos servidores, con el tiempo el modelo "federado" se ha convertido en uno de los puntos fuertes del ecosistema ROS. Cualquier grupo puede ejecutar su propio repositorio de código ROS en sus propios servidores, y lo poseen y lo controlan por completo. No necesitan el permiso de nadie. Si deciden hacer que su repositorio esté disponible públicamente, pueden obtener el reconocimiento de la comunidad que se merecen por sus logros y beneficiarse de los evaluadores y sugerencias de mejora, como todos los proyectos de código abierto.
En los últimos años, ROS ha crecido y ahora incluye una gran comunidad de usuarios en todo el mundo. Históricamente, la mayoría de los usuarios han estado en laboratorios de investigación, pero aparecen cada vez más en el sector comercial, especialmente en robótica industrial y de servicios.
La comunidad ROS es muy activa y cuenta con más de 3,000 miembros en la lista de discute.ros.org, más de 8,000 usuarios en la wiki de documentación conjunta y alrededor de 22,500 usuarios en el sitio para respuestas a las preguntas de ROS. Wikipedia contiene más de 22,000 páginas, y el ritmo de las ediciones es de aproximadamente 30 por día.
Por el momento, la cantidad de usuarios de ROS de habla rusa está en el puesto 15 entre otros países según el Informe de métricas de ROS 2018. Reunámonos, discutamos y arreglemos. También puede aprender sobre las capacidades de ROS para sus proyectos, sobre la práctica real de desarrollar robots.
Para participar como oyente, complete el
formulario .
Y si tiene un mensaje interesante para la comunidad, aún
puede convertirse en un orador .
Programa: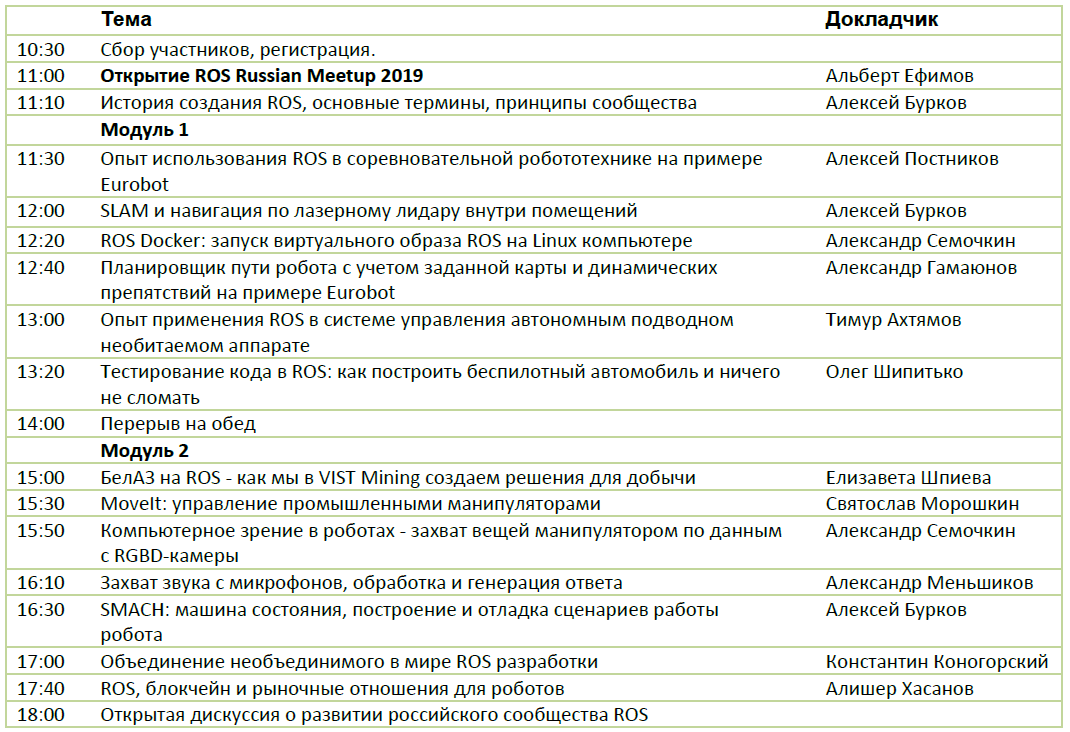
El evento está organizado por el Laboratorio de Robótica Sberbank.