Hola a todos! El desarrollo del hexapod está a punto de finalizar la primera versión de combate, y ahora es el momento de describir todo su llenado electrónico. También agregué HC-SR04 para detectar los obstáculos que faltaban tanto para la satisfacción visual en la apariencia del hexápodo. Habrá un pequeño video nuevo y tendrás la oportunidad de patearme electrónicamente.
Etapas de desarrollo:Parte 1 - DiseñoParte 2 - montajeParte 3 - CinemáticaParte 4 - trayectorias y secuencias matemáticasParte 5 - ElectrónicaParte 6: transición a la impresión 3DParte 7 - nuevo alojamiento, software de aplicación y protocolos de comunicaciónVer con HC-SR04 instalado Inicialmente, la caja se diseñó para placas de control y alimentación separadas, de modo que una se coloca en el centro de la caja más cerca de la batería, y la segunda se abre para facilitar la depuración. Y entonces comencemos.
Unidad de control
La unidad de control es el "cerebro" del hexápodo basado en el controlador SAM3X8E y consta de dos placas: una placa con un controlador y una placa de distribución. La placa con el controlador ya está en uso (la imagen a continuación), pero la placa de distribución tendrá que ser fabricada. Quizás en el futuro ordene una placa en la fábrica con un lugar para que el controlador retire el emparedado.
El objetivo principal de la placa de distribución es alimentar los dispositivos periféricos "ligeros", el controlador y distribuir las señales entre sus pines. He compilado una lista de mis requisitos para esta placa:
- Posibilidad de instalar en la placa HLK-RM04 (convertidor UART-WIFI);
- Posibilidad de conectar la pantalla I2C;
- Capacidad para conectar HC-SR04;
- Capacidad para medir el voltaje de la batería = voltaje de alimentación de la placa;
- Capacidad para medir la tensión de alimentación periférica y HLK-RM04;
- Conecte el tweeter para indicar la descarga de la batería;
- Indicación LED del estado del sistema: algo importante se cayó (la configuración es incorrecta u otra cosa), algo sin importancia se cayó (pantalla, por ejemplo), todo está bien;
Habiendo decidido un poco sobre la base elemental y apreciando las posibilidades de mi huevo de ahorros con polvo suelto, comencé a cablear el tablero inmediatamente sin crear su diagrama de circuito. Funcionó la primera vez y no encontré jambas en el trabajo. El cableado es el siguiente:
Especialmente amplió las pistas para que no hubiera problemas en el proceso de fabricación. Decidí hacer un tablero con LUT, resultó bien con solo 2 veces. Debajo del spoiler de la foto para comparar las opciones fallidas y exitosas (a la izquierda sin éxito, a la derecha exitosa).
Bueno, entonces todo está de acuerdo con las instrucciones: engañamos el tablero, perforamos agujeros y arrojamos componentes. El resultado no se hizo esperar:
HLK-RM04 se inserta en el centro, se inserta un bucle a la placa de alimentación en el peine a la derecha, se suministra alimentación a la izquierda. El voltaje en el tablero se mide mediante un simple divisor de voltaje. Durante la operación a largo plazo (30–40 minutos), el regulador de voltaje para HLK-RM04 se calienta significativamente y acabo de colocar un radiador.
Tablero de energía
El consumo de corriente total (pico) de las unidades es de aproximadamente 30 A (en promedio ~ 1.3 A por unidad) bajo una carga pesada, al caminar 10-13 A, en reposo: 5-6 A. Las mediciones se llevaron a cabo empíricamente con un multímetro.
Decidí separar la potencia de cada unidad en función de los reguladores de voltaje lineal, es decir. 18 reguladores de voltaje lineal, uno para cada variador. Como reguladores lineales se utilizan LM317D2T-TR configurados para producir 5V. Hay varias razones para usar 18 reguladores de voltaje lineal y usar reguladores en principio:
- No puede conectar directamente las unidades a la batería, para ellas la tensión de alimentación máxima permitida es de 6V;
- Independencia relativa de la velocidad \ esfuerzos de los variadores de la tensión de entrada;
- Los reguladores lineales están apilados. Una vez les compré un paquete de 70 piezas en Ali (el artículo hizo la mayor contribución a la solución);
- No encontré un regulador de voltaje lineal para tal corriente;
- No encontré un circuito DC-DC compacto y liviano para tal corriente;
- La opción de conectar reguladores en paralelo es bastante dudosa;
- La opción "regulador lineal + transistor amplificador" priva al circuito de alimentación de todas las funciones de protección que proporciona el regulador lineal (al menos eso es lo que escriben las personas y, en este caso, estoy de acuerdo con ellas);
- Soy bastante pobre diseñando fuentes de alimentación conmutadas;
El tablero es muy simple y no comencé a dibujar un diagrama de circuito para él, y el deseo de ver rápidamente el resultado también se hizo sentir. El cableado es el siguiente:
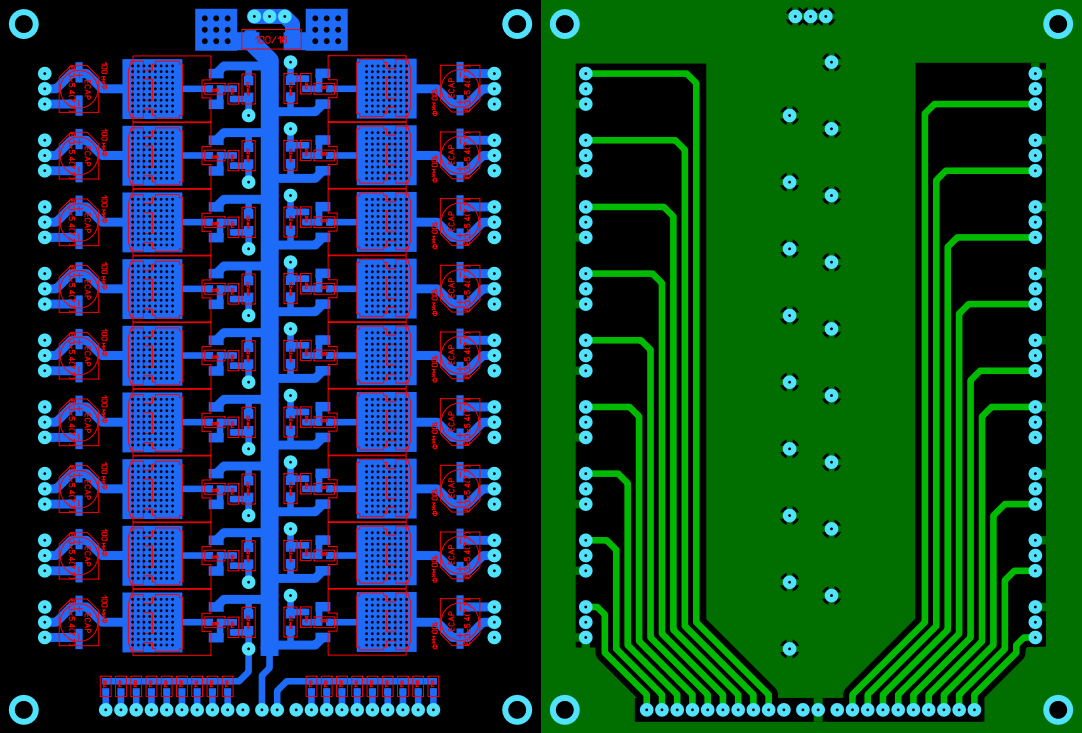
Arriba hay almohadillas de contacto para soldar cables para la batería, desde la parte inferior un peine para un cable y alimentación a la unidad de control, y las unidades están conectadas a los lados. Inicialmente, también quería hacer posible medir la cantidad de corriente consumida por cada servoaccionamiento y medir la temperatura de la placa, pero decidí no complicarlo aún.
El tablero era simple y confiable, no hay nada que romper. Realizó pruebas de carga a un voltaje de entrada de 11.1V (3S LiPo) y 7.4V (2S LiPo). A un voltaje de entrada de 11.1V, como se esperaba, los controladores estaban demasiado calientes y la protección de temperatura se activó al caminar (el radiador no se guardó, y los controladores SMD también), lo que me obligó a bajar el voltaje de entrada. Con un voltaje de 7.4V, los reguladores son cálidos y con una caminata prolongada, la protección ya no funciona, eso es lo que necesita.
El tablero también hizo LUT y resultó bastante bien la primera vez. Desafortunadamente, solo hay una fotografía de la versión experimental de la placa, y realmente no quería sacar una nueva durante aproximadamente 4 horas en algún lugar y no quería desmontarla por el bien de la fotografía (necesito desmontar aproximadamente el 70% del caso). La diferencia entre lo viejo y lo nuevo es solo en ausencia de agujeros en la línea central del tablero (se realizaron experimentos divertidos).
Algun video
Pruebas de rendimiento HC-SR04
La actitud de mi gato hacia el hexápodo
El primer paseo por la calle.