La tarde del 11 de abril de 2019 fue el punto de partida para el lanzamiento de un nuevo proyecto: "Bereshit 2.0", ya que el accidente del primer dispositivo privado al intentar aterrizar en la luna solo enfureció a los ingenieros y a la organización SpaceIL.
El espacio es cruel, y la luna no se deja sentar inmediatamente. Pero con experiencia y tecnología moderna, cada nuevo intento se vuelve más exitoso.
Materiales publicados anteriormente sobre la misión Bereshit: ¿Qué éxitos logró la misión Bereshit?Brevemente sobre la misión Bereshit: 8 años de desarrollo, el proyecto costó $ 100 millones, 200 científicos e ingenieros voluntarios, 47 días de vuelo y más de 6.5 millones de kilómetros fueron superados, al comienzo de 380 kilogramos de combustible, un motor LEROS 2b acelerado, 6 cámaras laterales , un magnetómetro, una serie de reflectores de esquina láser y 1 intento de aterrizaje, en el que un aparato de 150 kilogramos con 76 kilogramos de combustible (hidrazina) en tanques de alta velocidad, volando lejos de la zona del aterrizaje planeado, cayó a la superficie de la luna.
El aparato Bereshit estaba en órbita de la Luna y usó un magnetómetro durante el aterrizaje y transmitió al CCM algunos de los datos científicos sobre el campo magnético de la luna.
Ahora Israel es el séptimo país que lanzó su nave espacial a la órbita de la Luna (y la mantuvo allí durante 7 días).La lista de países (se cuentan sus primeros dispositivos) con dispositivos en órbita de la luna:1. Luna-10, URSS, 1966;
2. Lunar Orbiter 1, Estados Unidos, 1966;
3. Hagoromo, Japón, 1990;
4. SMART-1, ESA, 2005;
5. Chang'e-1, China, 2007;
6. Chandrayan-1, India, 2008;
7. Bereshit, Israel, 2019.
Y, sin embargo, ahora Israel es el séptimo país que dejó caer su nave espacial sobre la superficie lunar (aunque durante el proceso de aterrizaje, que se convirtió en un accidente fatal incontrolable).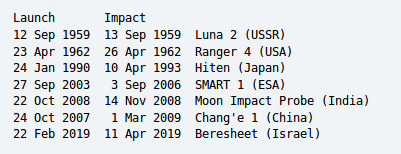
Se supone que el diámetro del cráter formado después de caer de 3 a 5 metros. El aparato Bereshit se estrelló contra la superficie lunar en un ángulo pequeño (~ 8 °), el cráter puede alargarse.
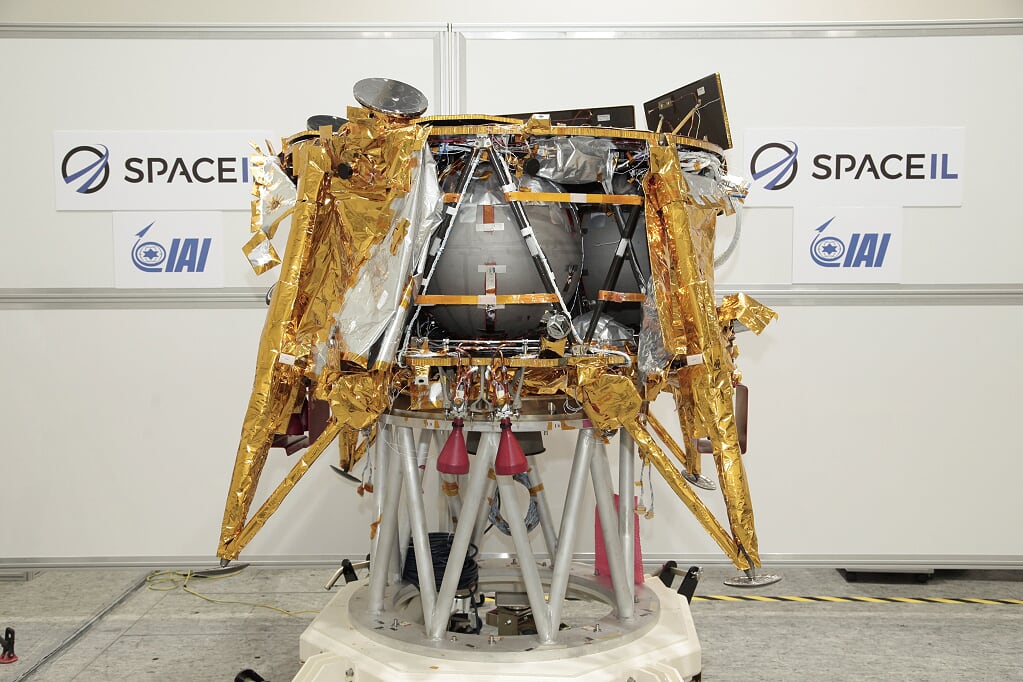
El costo de los componentes del dispositivo Bereshit (
foto tomada desde aquí ):

Las principales características de la misión y la nave espacial lunar Bereshit:- inicio de la misión: 22 de febrero de 2019;
- fin de la misión: se estrelló en la superficie de la luna en la etapa final del aterrizaje el 11 de abril de 2019;
- la trayectoria del movimiento hacia la Luna (de hecho, el máximo posible): complejo, cambiante al realizar una serie de maniobras (encender los motores durante varios segundos o incluso minutos) para aumentar el apogeo de su tapizado elíptico después de cada órbita alrededor de la Tierra;
- la altura del aparato Bereshit es de aproximadamente 1,5 metros, un diámetro de 2 metros (2,3 metros entre los soportes de aterrizaje);
- peso 530 kilogramos con combustible (peso del combustible - 380 kg), 150 kg sin combustible;
- motor principal: modificación de LEROS 2b;
- El elemento principal de la computadora de a bordo: procesador de doble núcleo Gaisler HiRel GR712RC;
- Seis cámaras de 8 megapíxeles Imperx Bobcat B3320C con óptica Ruda;
- instrumentos científicos: magnetómetro, conjunto de reflectores de esquina láser.
El dispositivo Bereshit fue desarrollado por organizaciones SpaceIL, que cuenta con el apoyo principalmente de inversores privados, incluido el magnate estadounidense Sheldon Adelson y el multimillonario Morris Kahn, que también son cofundadores de Amdocs (DOX), una de las compañías más grandes de Israel.
Es imposible enviar el aparato lunar al espacio por las fuerzas y los medios de una sola pequeña empresa privada, pero con la ayuda de la comunidad espacial internacional, puede convertir la idea en un proyecto completo que se está implementando actualmente.
Participantes del proyecto involucrados en la misión Bereshit:- Un equipo de jóvenes científicos e ingenieros israelíes de SpaceIL,
- NASA (EE. UU.),
- ISA (Agencia Espacial Israelí),
- IAI (preocupación de la industria de la aviación de Israel),
- Spaceflight Industries (EE. UU., Organizador del lanzamiento del aparato Bereshit en órbita),
- Compañía SpaceX (EE. UU., Cohete de refuerzo Falcon 9),
- Corporación Espacial Sueca (Corporación Espacial Sueca),
- empresa Cobham (Suecia),
- empresa Ramon Chips (Israel).

Después de todo, SpaceIL es una pequeña organización según los estándares mundiales, emplea a unas 200 personas, y la mayoría de ellos son científicos e ingenieros voluntarios que "buscan promover el desarrollo del progreso tecnológico y científico en Israel".
¿Qué sucedió durante el aterrizaje del dispositivo Bereshit el 11 de abril de 2019?De hecho, los problemas con el dispositivo Bereshit comenzaron casi inmediatamente después del lanzamiento.
Febrero 2019:
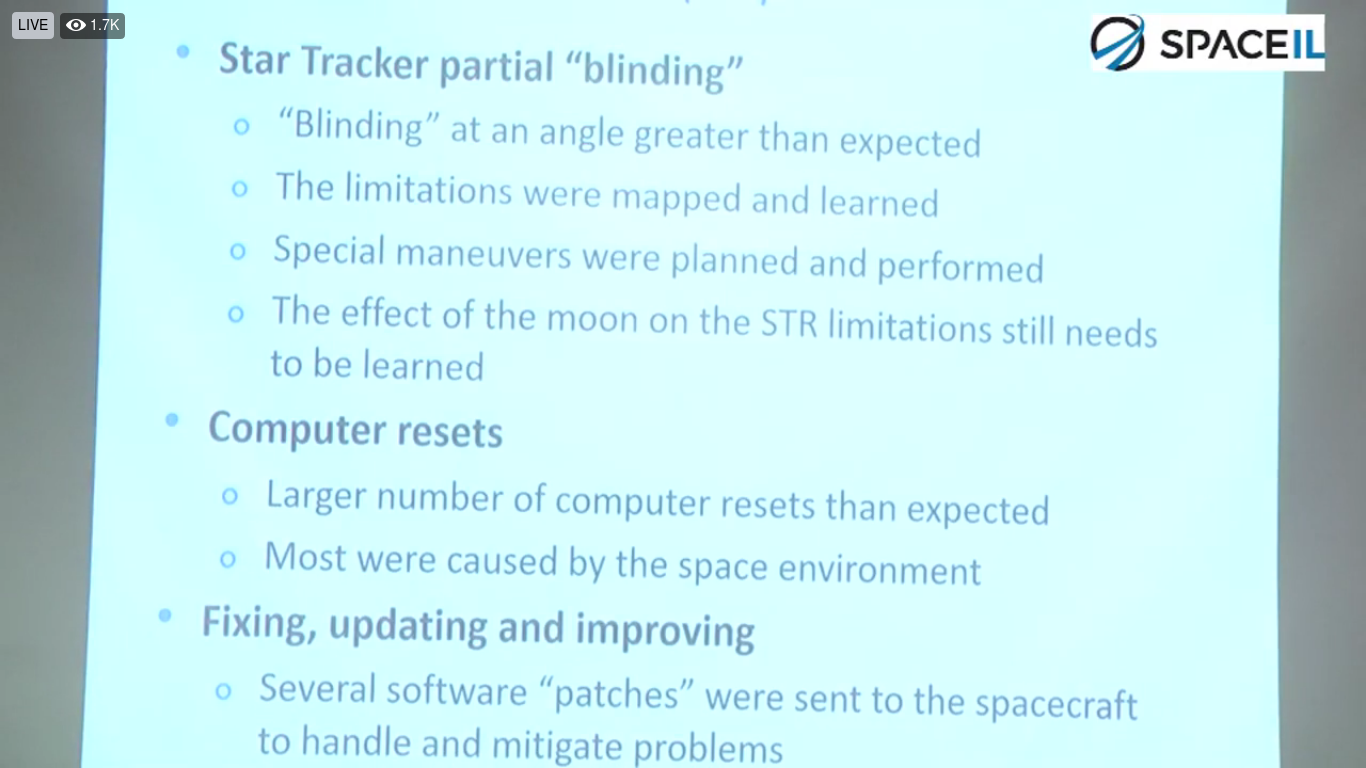
La iluminación solar de los sensores de la posición del dispositivo (los sensores eran muy sensibles a tal "deslumbramiento"), lo que puede afectar la orientación del dispositivo en el espacio.
Solución: se realizó una compensación de software para procesar los datos de los sensores y reducir su sensibilidad, se realizaron múltiples comprobaciones adicionales de los nuevos datos de los sensores del dispositivo.En la etapa de preparación, antes de realizar la segunda maniobra del motor, la computadora a bordo Bereshit se reinició inesperadamente, y la etapa de ejecución de la maniobra se canceló automáticamente. Los ingenieros de SpaceIL e IAI comenzaron a analizar la situación.
Hubo un problema a bordo que limitó la maniobrabilidad del dispositivo.
Solución: los ingenieros de SpaceIL e IAI repararon la falla en el sistema informático del dispositivo Bereshit, ahora el dispositivo Bereshit continúa su vuelo a la Luna en el modo normal.Además, SpaceIL no anunció nuevos funcionamientos defectuosos o problemas con el aparato Bereshit , sin embargo, antes de las maniobras lunares, el informe tenía tal deslizamiento en el que hubo más de un reinicio / falla en el trabajo del BC, varios e incluso más de lo que los ingenieros habían esperado. , y debido al duro entorno espacial.
Problemas y soluciones que estaban en el espacio (resulta que hubo muchos reinicios del BC):
Por lo tanto, podría esperarse que después de 1128 horas de vuelo (47 días), los problemas con los componentes internos del dispositivo Bereshit pudieran llegar a ser fatales, y su corrección es imposible si los elementos fallan o funcionan anormalmente bajo una carga severa y la influencia del entorno espacial.
El aterrizaje del dispositivo en la Luna es un proceso complejo en el que la computadora de a bordo realiza una gran cantidad de tareas: controlar los modos de funcionamiento de los motores, analizar la telemetría y los datos de los sensores (posición, altitud, velocidad, aterrizaje, etc.), ajustar la posición actual del dispositivo de acuerdo con la ruta de aterrizaje y coordenadas reales, consumo de combustible adaptativo, transmisión de datos mediante un sistema de comunicación.
Y si se produce una situación de emergencia con uno o más sensores durante el aterrizaje, este momento se puede compensar automáticamente si hay un circuito de respaldo, o reiniciando (reiniciando) el sistema informático a bordo si hay tiempo para este proceso.
En modo manual y en tiempo real, los ingenieros del MCC no controlaron el aparato Bereshit, la computadora de a bordo aterrizó, después de que el aparato salió del "punto de no retorno", cuando solo era necesario llevar a cabo el procedimiento de aterrizaje, cuyos comandos fueron recibidos previamente por la computadora de a bordo.
Pero para tener en cuenta la situación y compensar los problemas cuando varios elementos fallan en una cascada, y luego debido a sus fallas, los componentes principales del dispositivo (motores, sistema de telemetría, computadora de a bordo) se apagarán; esto también es difícil para un aparato de este nivel (sin sistemas de control redundantes ), como ha demostrado la práctica, es imposible.
¿Qué más se sabe sobre los componentes de hardware y software del dispositivo Bereshit?- un (1) motor de empuje 430N y ocho (8) motores de empuje 25N. Se utilizaron motores de derivación al aterrizar para ayudar a la tubería principal;
- La temperatura de la electrónica se mantiene en el rango de -10 ° C a + 40 ° C. La mayor parte de la electricidad se gasta en calentar la electrónica (sin sistema de enfriamiento);
- la computadora de a bordo es una (1), no duplicada;
- el sensor de estrella para orientar el dispositivo Bereshit está equipado con un cono negro para absorber los rayos de terceros, sin embargo, cuando el dispositivo Bereshit se separó de los satélites después del inicio, resultó que el cono estaba sucio, los ingenieros hicieron frente a este problema, descubriendo qué ángulos de reflexión no ocurrieron e introdujeron ajustes al algoritmo de software para procesar datos del sensor (usando parches de software);
- hubo varios reinicios de computadora durante el vuelo a la luna;
- controle el código del programa, los comandos y trabaje con la computadora de a bordo - en lenguaje C;
- debido al hecho de que solo hay una computadora, al reiniciar todas las actualizaciones (parches) se borran y deben descargarse nuevamente al sistema;
- baja velocidad de transferencia de datos: una foto de alta resolución (de una cámara de 8 Mpx) carga 40 minutos;
- DLR (Centro Aeroespacial Alemán) probó el mecanismo de aterrizaje de la nave espacial Bereshit.
Equipo SpaceIL: La mayoría de ellos son ingenieros aeronáuticos y físicos. Pero hay algunos miembros más jóvenes que fueron entrenados por la unidad de operaciones satelitales de las FDI.
Sistemas de hardware Bereshit, cuya falla podría conducir a una ejecución anormal de las etapas del procedimiento de aterrizaje y una caída:
El motor del dispositivo Bereshit.El motor del aparato Bereshit es una unidad de misiles químicos especialmente adaptada (para la misión Bereshit que se modificó acortando la boquilla y aumentando el empuje) de la familia LEROS (para uso en plataformas satelitales) - Modificación LEROS 2b en hidrazina (monometilhidrazina) con un empuje de 45 kgf (441H), que es un poco más que sus características regulares a 41.5 kgf (407H).

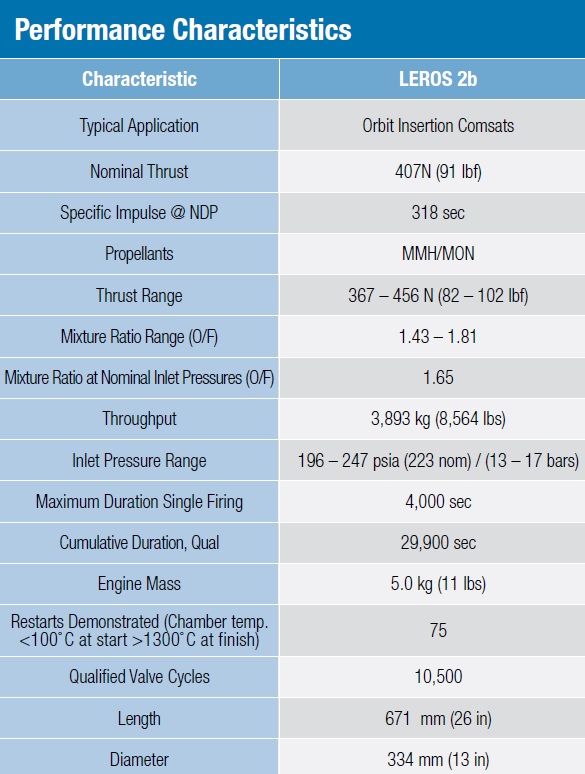
Se supone que este motor no fue diseñado para arranques múltiples y no se estrangula, aunque durante la misión Bereshit hubo arranques múltiples del motor principal durante varios minutos, y durante el aterrizaje, decenas de minutos.
El empuje total de los motores de derivación es 8 * 25H = 200H (la mitad del principal). Es decir, cuando se apaga el motor principal, el empuje disminuirá tres veces, lo que se observó durante el aterrizaje.
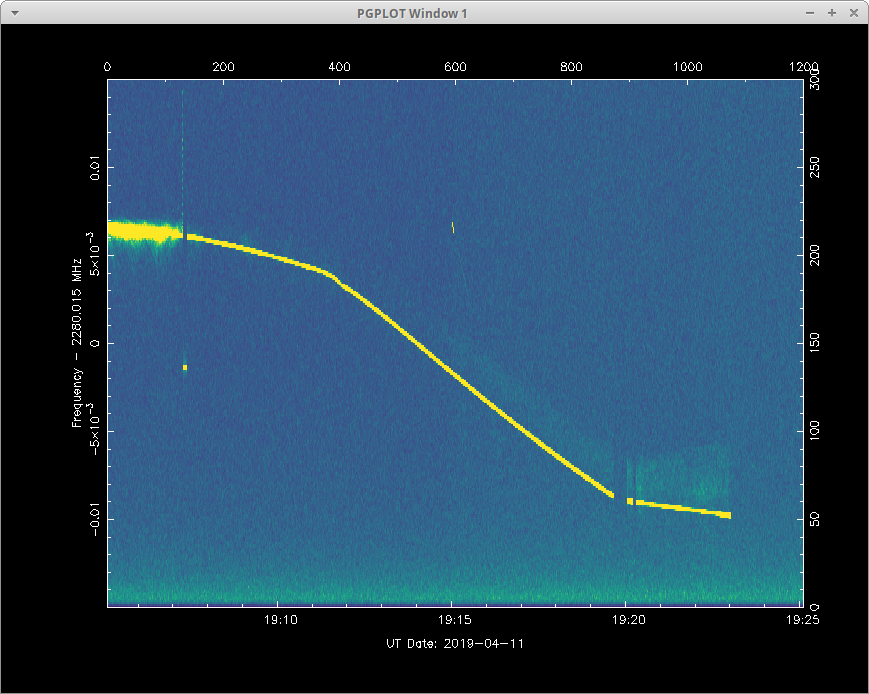
Las paradas del motor durante el aterrizaje también se registraron:
La curva Doppler del aterrizaje-caída del aparato Bereshit, alrededor de las 19:19, el frenado casi se detuvo:
 Ordenador de a bordo.
Ordenador de a bordo. Procesador HiRel GR712RC de Cobham Gaisler
Procesador HiRel GR712RC de Cobham GaislerComo elemento principal de la computadora de a bordo, el dispositivo Bereshit utiliza el
procesador Cobham de
doble núcleo Gaisler HiRel GR712RC .
Tecnológicamente, el chip se basa en LEON SPARC y se fabrica utilizando una tecnología única de silicio resistente a la radiación.
SpaceIL se convirtió en el
primer cliente de este procesador y los ingenieros de SpaceIL escribieron un software especial para él antes de la entrega real y el intercambio en el dispositivo Bereshit.
GR712RC es un procesador de doble núcleo LEON3FT SPARC V8 . Puede operar a frecuencias de hasta 125 MHz en todo el rango de frecuencias militares. Esto proporciona hasta 300 DMIPS y 250 MFLOPS de máximo rendimiento. Integra protocolos de interfaz avanzados, incluidos SpaceWire, CAN, SatCAN, UART, 1553B, Ethernet, SPI, I2C, GPIO y otros. Tiene buses de interfaz de alta velocidad para memoria externa SDRAM / SRAM / PROM / EEROM / NOR-FLASH. Resistencia a la radiación comprobada: hasta 300 grados. Bajo consumo de energía.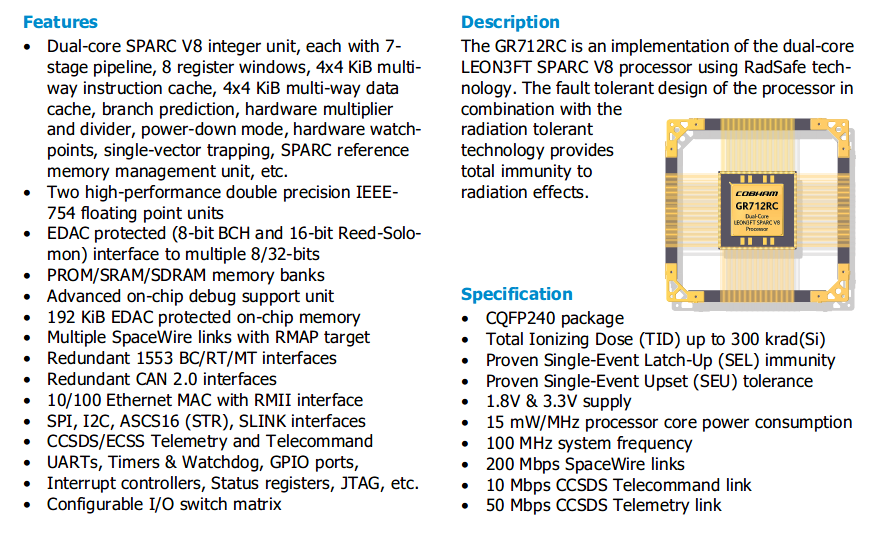

Según datos actualizados, este procesador se fabrica utilizando la tecnología más común disponible en el mercado (TowerJazz 180 nm, fabricado en Israel), casi lo mismo que hacen los controladores para hervidores eléctricos. Garantizar la alegría sin interferir con la tecnología, debido a los circuitos y la topología de los elementos, lo que cuesta un pedido o dos más barato que si el proceso de fabricación se desarrollara específicamente.
La computadora a bordo del aparato Bereshit ya se había reiniciado varias veces antes de aterrizar debido a la influencia del entorno espacial (radiación, temperatura).
TT&C.El subsistema de seguimiento, telemetría y comando (TT&C - subsistema de seguimiento, telemetría y comando) utilizado en este proyecto "colgó" dos (2) veces en la etapa de aterrizaje final, aunque su estado era "OK"
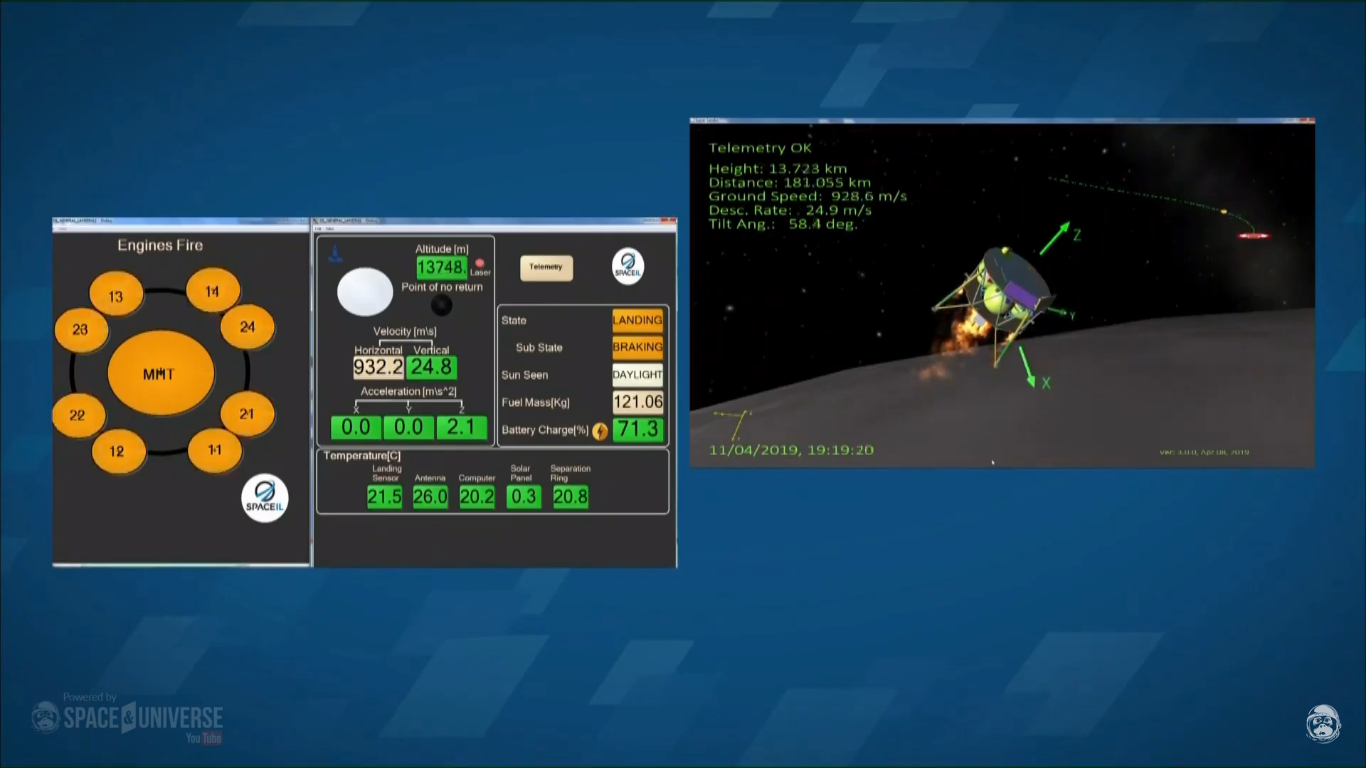
Sensores y elementos del sistema del dispositivo Bereshit en la ventana de datos de telemetría:
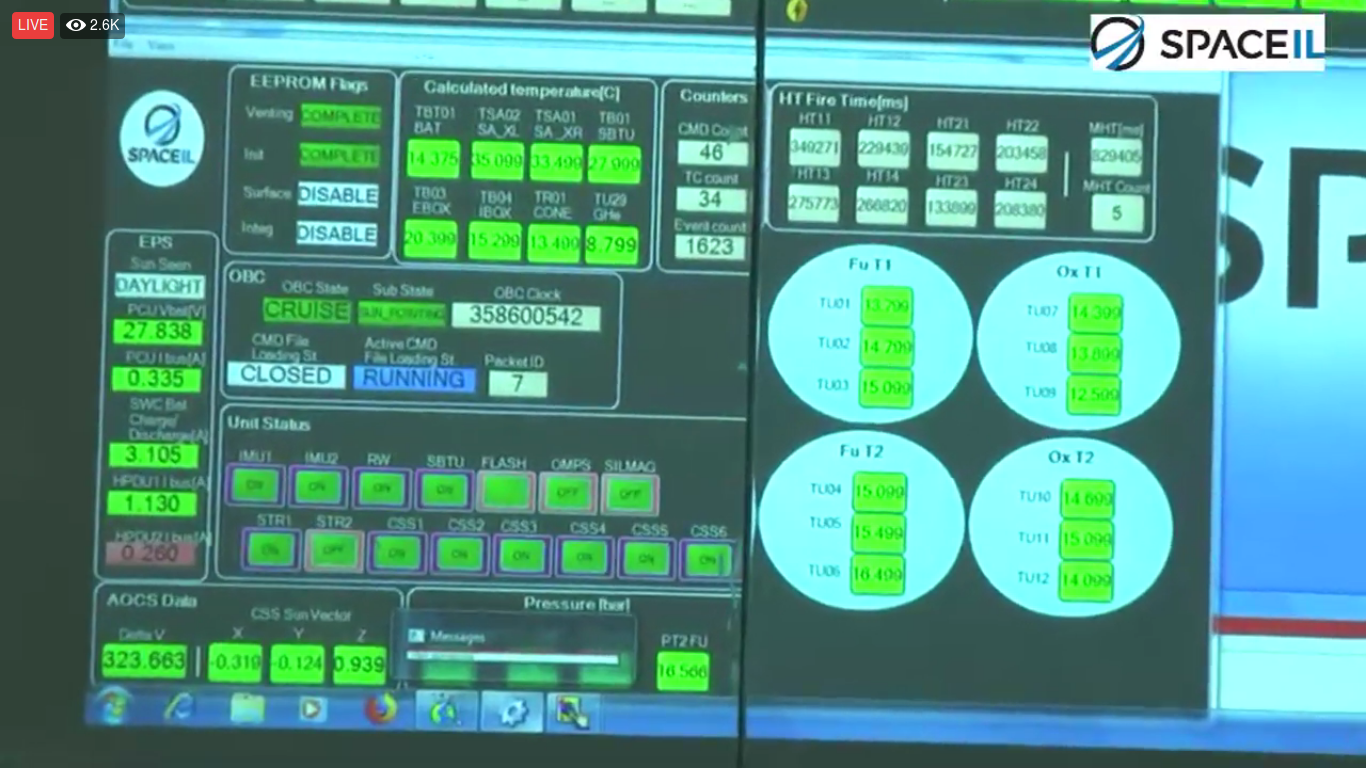
Cómo colgó el sistema de telemetría:


Esto es lo que vieron los ingenieros en el MCC al aterrizar, según los datos de telemetría:
Modo de aterrizaje normal:
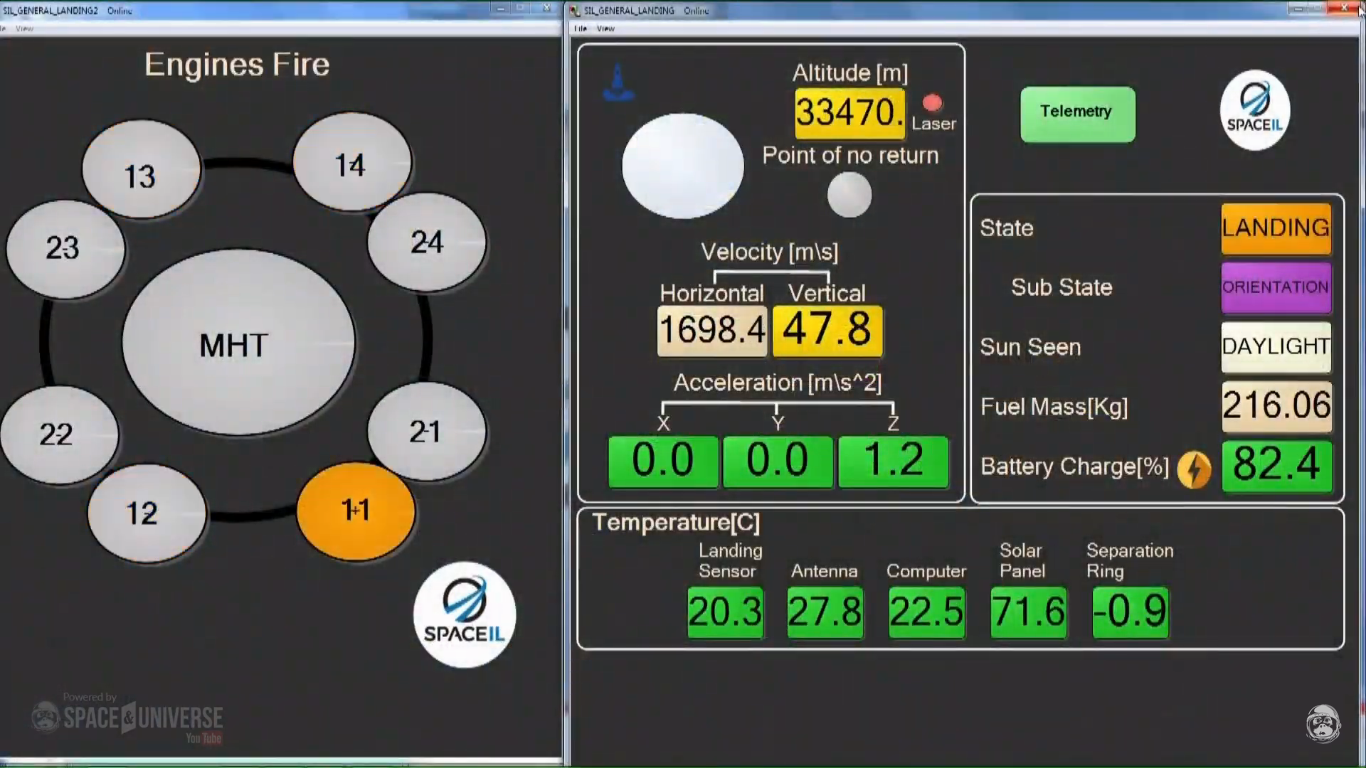

Y aquí, los problemas ya comenzaron con el apagado del motor, la "congelación" de los datos de telemetría y las lecturas de velocidad anormales, que en las alturas de diseño deberían ser completamente diferentes.






23:03 El indicador de telemetría se vuelve verde. Subestado es Orientación.
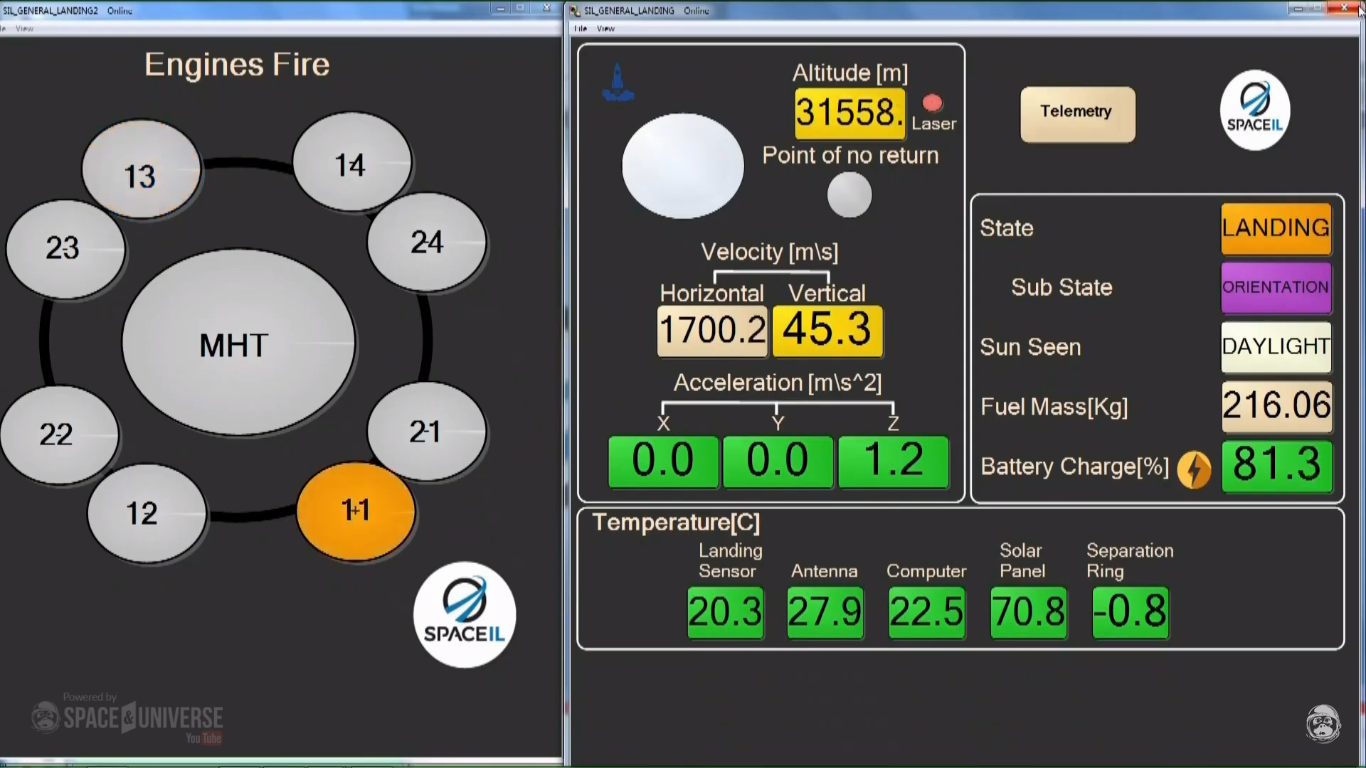
25:04 Sub Estado cambia a Frenado.
25:20 "Hemos pasado el punto de no retorno".
25:26 El indicador de punto de no retorno se vuelve negro.
25:52 La pantalla de velocidad vertical se vuelve verde.
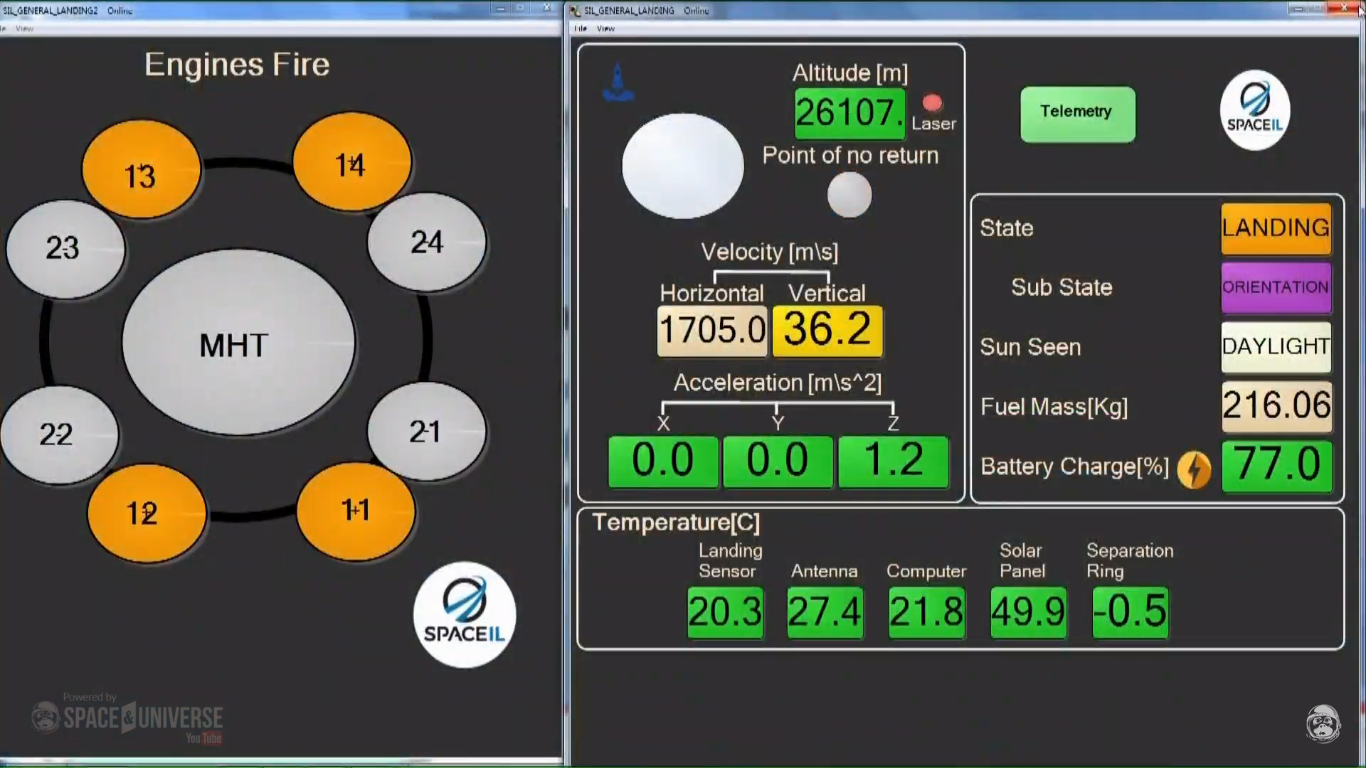
28:16 El indicador de telemetría ya no es verde.
28:20 El indicador de telemetría se vuelve momentáneamente verde, luego ya no es verde.
29.37 La distancia se muestra como 210 km.
29:50 La distancia cambia a 385 km.
30:03 La distancia cambia a 370 km.
30:40 El indicador de telemetría es verde.
30:51 La distancia es de 314 km.
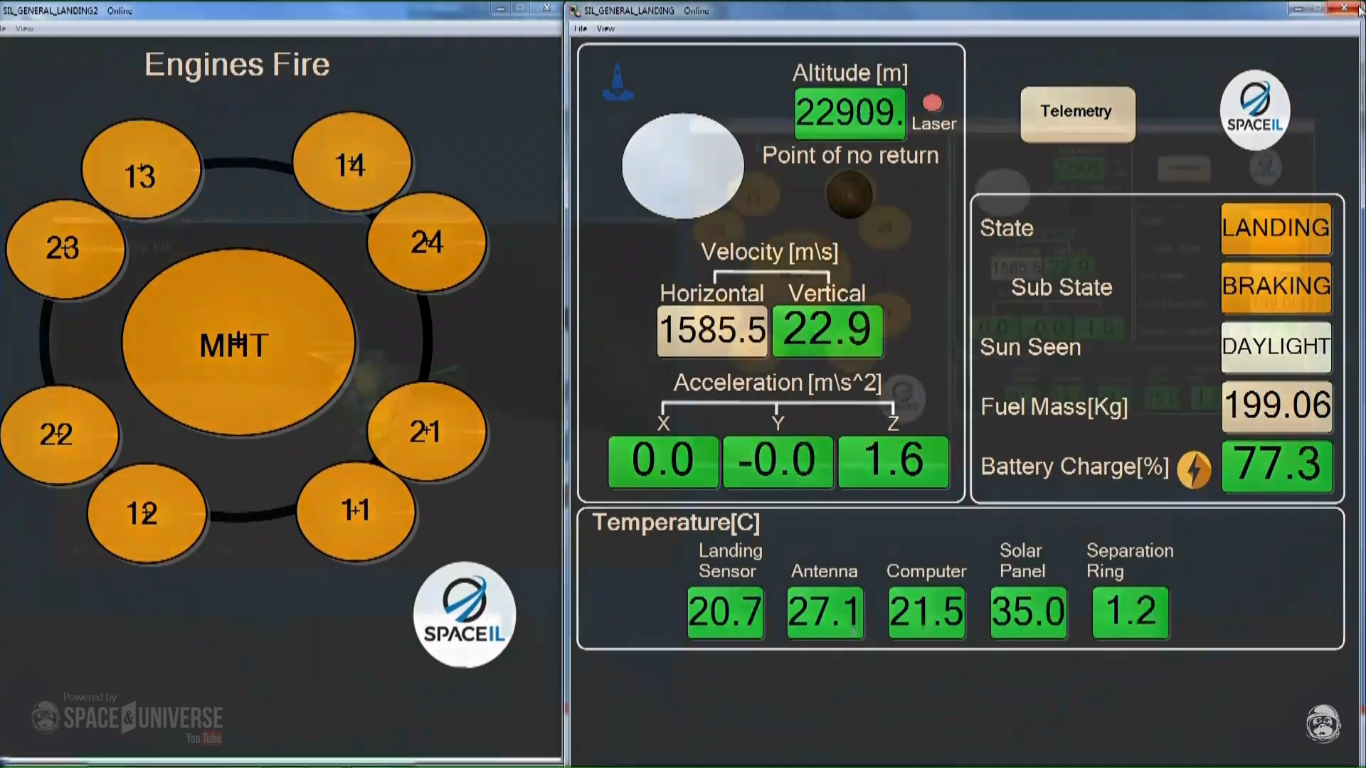
31:33 Se muestra el selfie de Beresheet. Altitud aprox 22 km ??? La telemetría es verde.
31:50 El indicador de telemetría ya no es verde.
31:55 a 32:29 "[inaudible] matarlo". "[Charla de misión más inaudible] ocupado".
32:48 Se muestra la pantalla de telemetría. El indicador de telemetría es de color amarillo claro. La altitud es de 14095 m. La velocidad horizontal es de 955.5 m / s. La velocidad vertical es de 24.8 m / s. El motor principal está encendido. La velocidad horizontal es de color amarillo claro. Otros parámetros son verdes, excepto el indicador de telemetría.
32:49 Todos los motores están encendidos.
32:51 Todos los motores están apagados.
32:55 El motor principal está encendido.
32:57 Todos los motores están encendidos.
32:59 El motor principal está encendido. La distancia es de 183.8 km.
33:01 - 33:03 "IMUstein no está bien".
33:02 Todos los motores están encendidos.
33:05 El motor principal está encendido.
33:07 Todos los motores están encendidos.
33:09 El motor principal está encendido.
33:11 Todos los motores están encendidos.
33:13 El motor principal está encendido.
33:16 Todos los motores están encendidos.
33:20 El indicador de telemetría se vuelve verde. Todos los motores están apagados. Todas las pantallas permanecen estáticas (sin cambios).
33:32 El indicador de telemetría ya no es verde. Todos los motores están apagados. Todas las pantallas permanecen estáticas (sin cambios).
34:24 El indicador de telemetría se vuelve verde. Todos los motores están apagados, pero supuestamente se encienden. La aceleración vertical en el eje Z se fija en 0.6. "Actualmente tenemos un problema en una de nuestras unidades de medición de inercia". La velocidad vertical comienza a aumentar constantemente. La altitud continúa disminuyendo constantemente. La aceleración vertical en el eje Z se vuelve fija en 0.6. El motor principal probablemente no está encendido.
El indicador de telemetría se vuelve intermitente en verde y luego se vuelve amarillo claro, hasta la siguiente marca de tiempo de video.
34:56 El indicador de telemetría ya no es verde. Aunque todos los motores se muestran como encendidos, la velocidad vertical continúa aumentando. La aceleración vertical en el eje Z permanece fija en 0.6. El motor principal probablemente no está encendido.
36:25 - 36:33 “Parece que tenemos un problema con nuestro motor principal. Estamos reiniciando la nave espacial para intentar habilitar el motor ".
36:40 El indicador de telemetría es verde. Todos los motores parecen estar encendidos, sin embargo, la aceleración del eje Z permanece fija en 0.6 m / s. La altitud es de 678 metros. Las velocidades horizontal y vertical son 948.1 m / sy 130.1 m / s respectivamente.
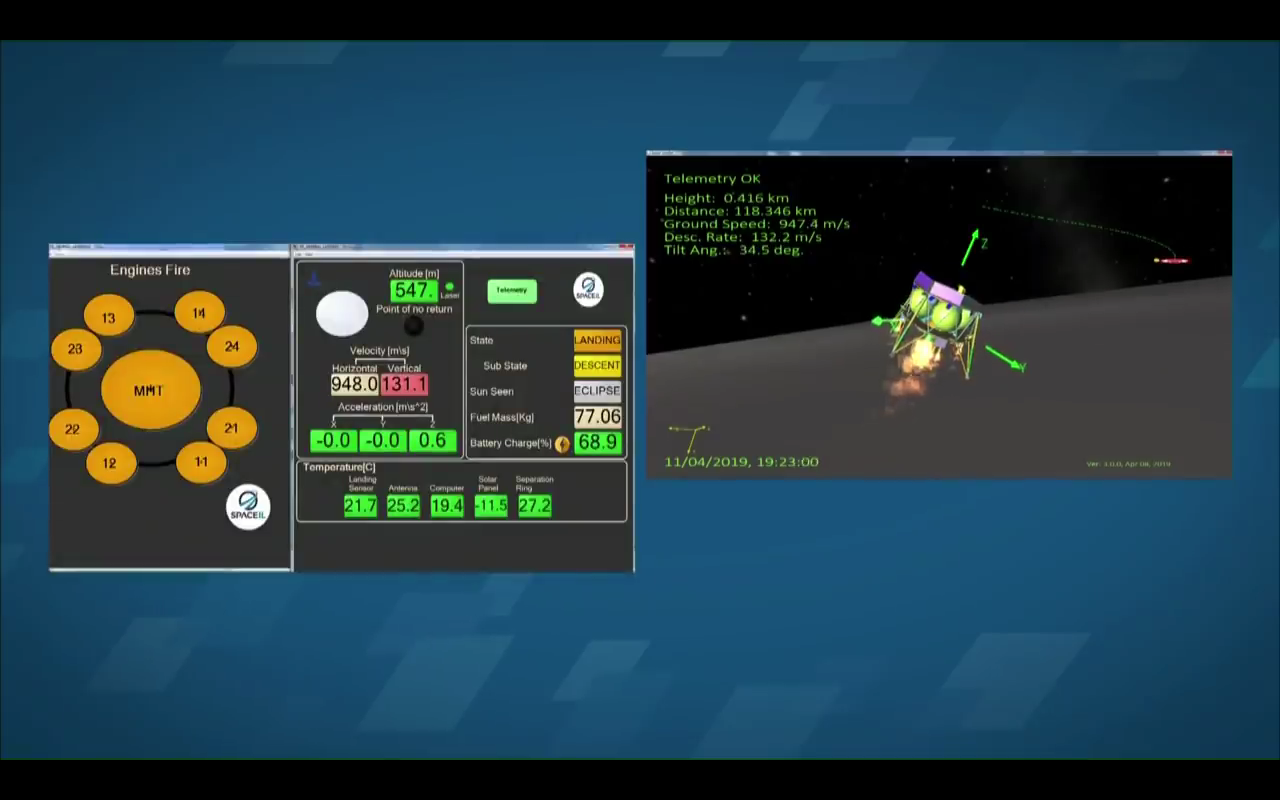
36:44 Últimos datos de telemetría. El indicador de telemetría es verde. Todos los motores parecen estar encendidos. La aceleración del eje Z cambia a 0.7 m / s. La altitud final es de 149 metros. Las velocidades horizontales y verticales finales son 946.7 y 134.3 m / s respectivamente. El motor principal no parece funcionar correctamente.
Los últimos 4 segundos de la vida útil del dispositivo según los datos del MCC (disminución de 678 a 149 metros):
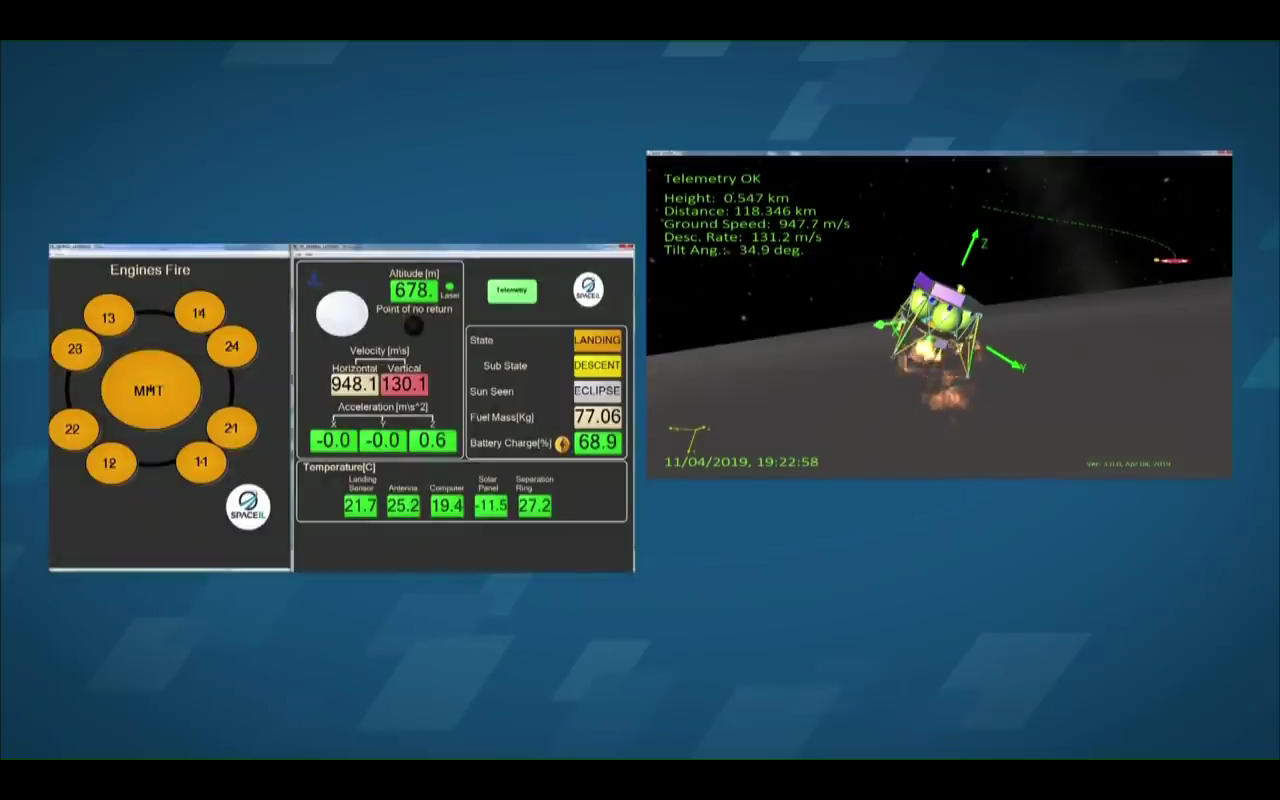
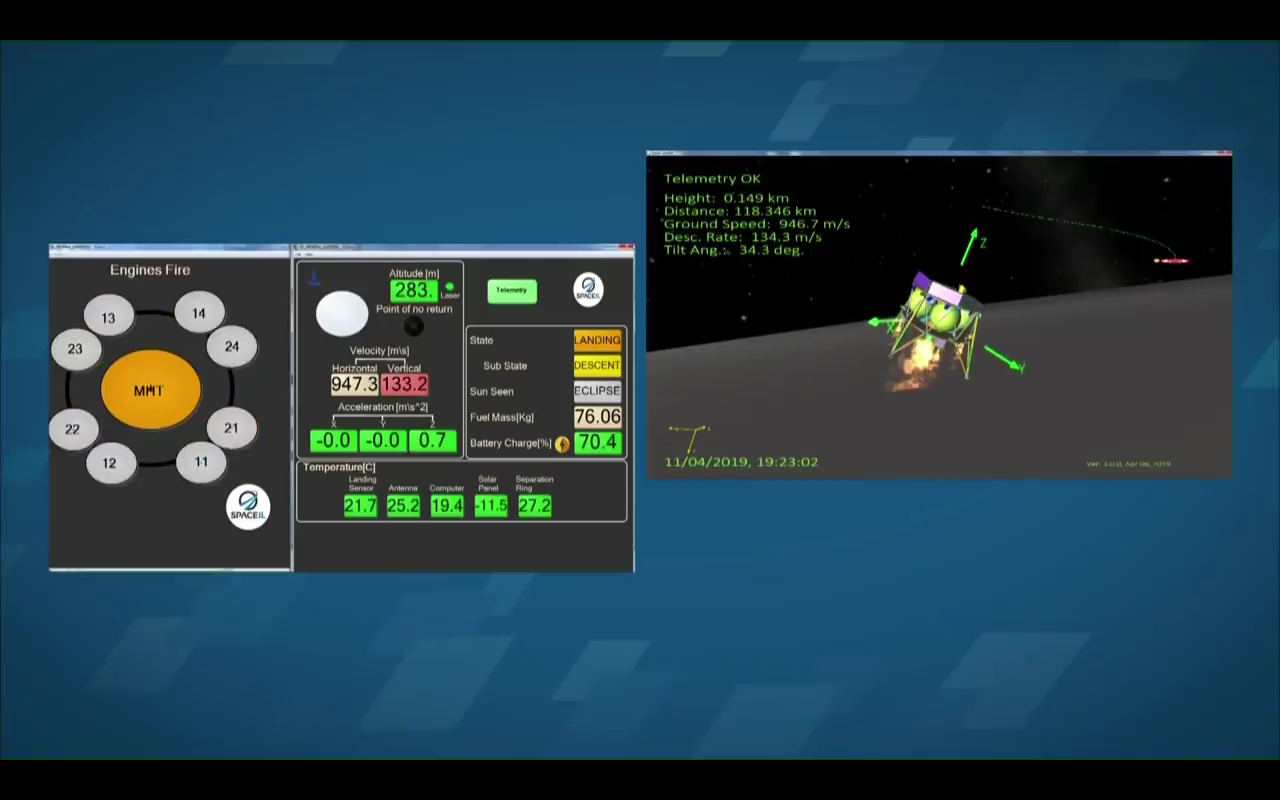

A las 19:23 los datos de telemetría dejaron de llegar por completo.
Anteriormente, los problemas comenzaron a una altitud de 14 km, el motor principal se apagó durante el aterrizaje y, después de que se reinició, era demasiado tarde, el dispositivo no pudo frenar correctamente, este mal funcionamiento provocó una fuerte caída a alta velocidad y desde una altura de 150 metros hasta la luna.
Unidad de orientación inercial (unidad de medida de inercia - IMU1, IMU2) - los nodos están duplicados.Pero esto es interesante, ya que aquí se usaron dos bloques y sus datos fueron muy importantes para la computadora de a bordo.
Ya antes, debido a las fallas de tales módulos, hubo accidentes, como con el aparato Schiaparelli en Marte en 2016.
Resultó que se produjo un error fatal en el funcionamiento del software Skiaparelli debido a problemas en el funcionamiento del "Medidor de Inercia" (IMU), un dispositivo que mide la velocidad de rotación del módulo alrededor de su eje.
Los datos de este dispositivo , como explican los ingenieros, se tuvieron en cuenta al procesar los datos de altitud de los radares Schiaparelli. En un momento, la IMU se bloqueó, como resultado de lo cual "midió" una velocidad de rotación anormalmente alta del render, que fue más allá de los valores permitidos. Tales fallas son la norma en la operación de los sensores inerciales, y generalmente para suprimirlos, los científicos "suavizan" la señal y comparan los datos del momento actual con los resultados obtenidos en épocas pasadas.
Pero en este caso, la IMU transfirió datos a la computadora host Schiaparelli durante un tiempo inesperadamente largo, por un segundo, lo que "engañó" al software del módulo y lo obligó a considerar estas mediciones como datos reales, y no una anomalía. Se tomaron en cuenta valores incorrectos al calcular la altura del módulo, como resultado de lo cual la computadora a bordo Skiaparelli recibió valores de altura negativos.
El módulo consideró que ni siquiera estaba en la superficie de Marte, sino debajo, lo que lo obligó a iniciar la etapa final del procedimiento de aterrizaje a una altitud de 3.7 km, para separar los paracaídas y apagar los motores.El dispositivo Bereshit utilizó el siguiente módulo IMU:
STIM300 .
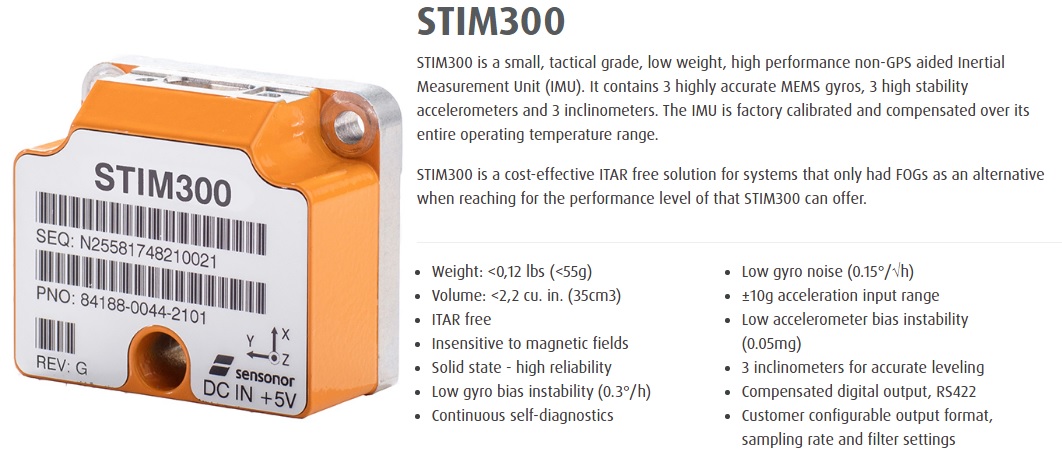
Este módulo tiene características de protección contra la radiación de bajo nivel, por lo que el uso de tales dispositivos en la Luna probablemente será más pensado por los ingenieros de SpaceIL más adelante en nuevas misiones.
Dado que hubo una declaración de SpaceIL después del accidente:
“Problema en una de las unidades de medida de inercia de Beresheet. Los controladores de tierra perdieron la telemetría por unos momentos, pero han vuelto a adquirirla.¿Es cierto que el módulo Bereshit IMU (o ambos módulos) proporcionó datos incorrectos (incluida la medición de aceleraciones angulares y lineales que se hicieron imposibles) para la computadora de a bordo y por qué motivo? Esto todavía está bajo investigación por parte de los ingenieros de SpaceIL
Sin embargo, por ahora está claro que la nave espacial Bereshit experimentó un mal funcionamiento técnico en uno de los componentes, lo que provocó el apagado del motor, lo que impidió que la nave espacial redujera la velocidad de descenso a la superficie lunar.
Cuando se reiniciaron los motores, ya no podían realizar el frenado completo, resultó que la velocidad del vehículo era demasiado alta, y la altitud hasta la superficie de la luna se redujo críticamente, y se produjo una colisión destructiva.

La última foto de la cámara Bereshit también es un poco confusa. Dado que muestra la superficie lunar a 1000 km de la zona de aterrizaje planificada en el Mar de la Claridad.
El último fotograma (publicado oficialmente) del aparato Bereshit (desde una altura de 8 km):
Por lo tanto, será muy difícil encontrar al menos algo del dispositivo Bereshit, ya que el área de búsqueda es muy extensa:
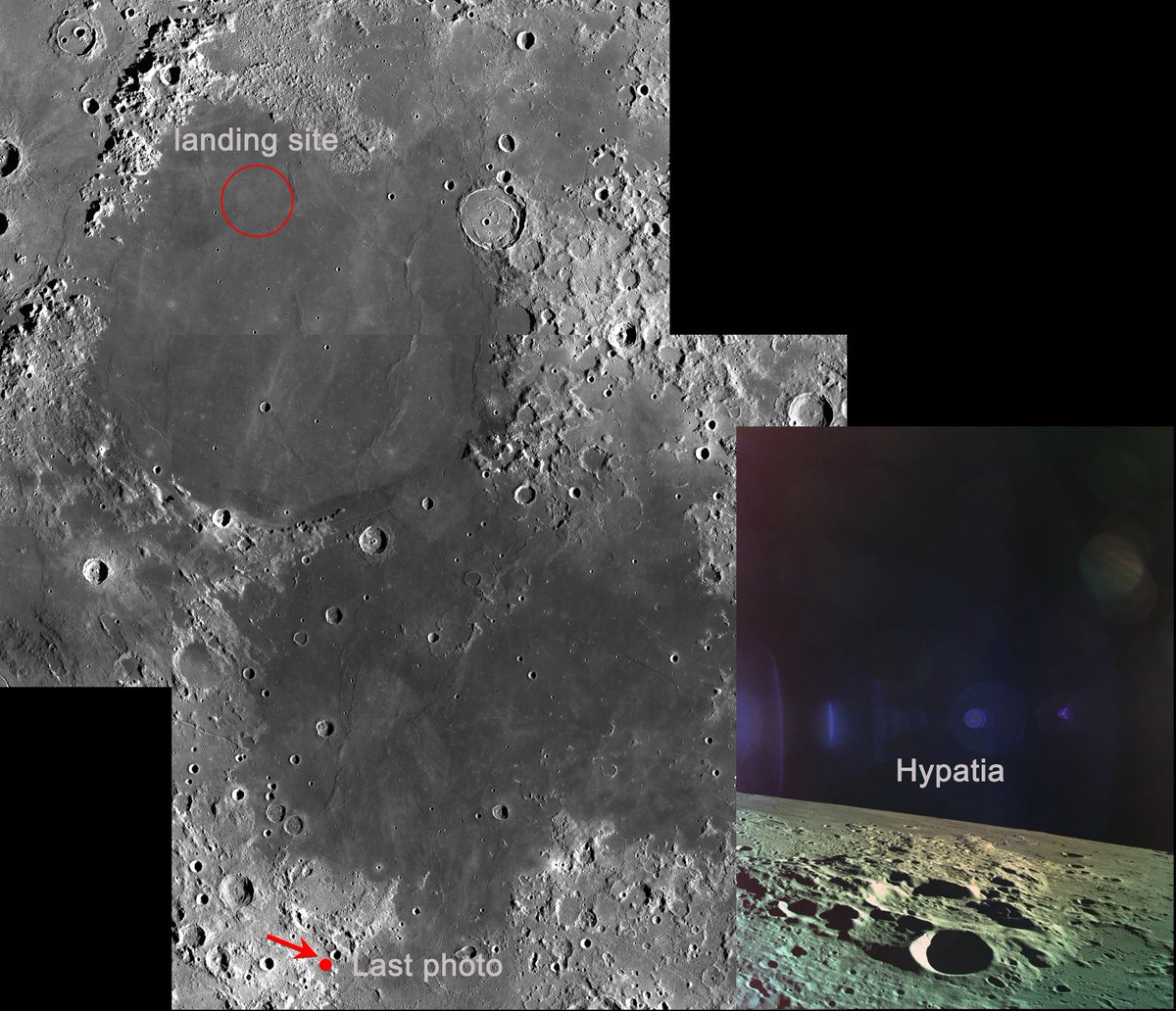
Aunque está un poco claro dónde mirar (200 km hasta la zona de aterrizaje del Apolo 11):

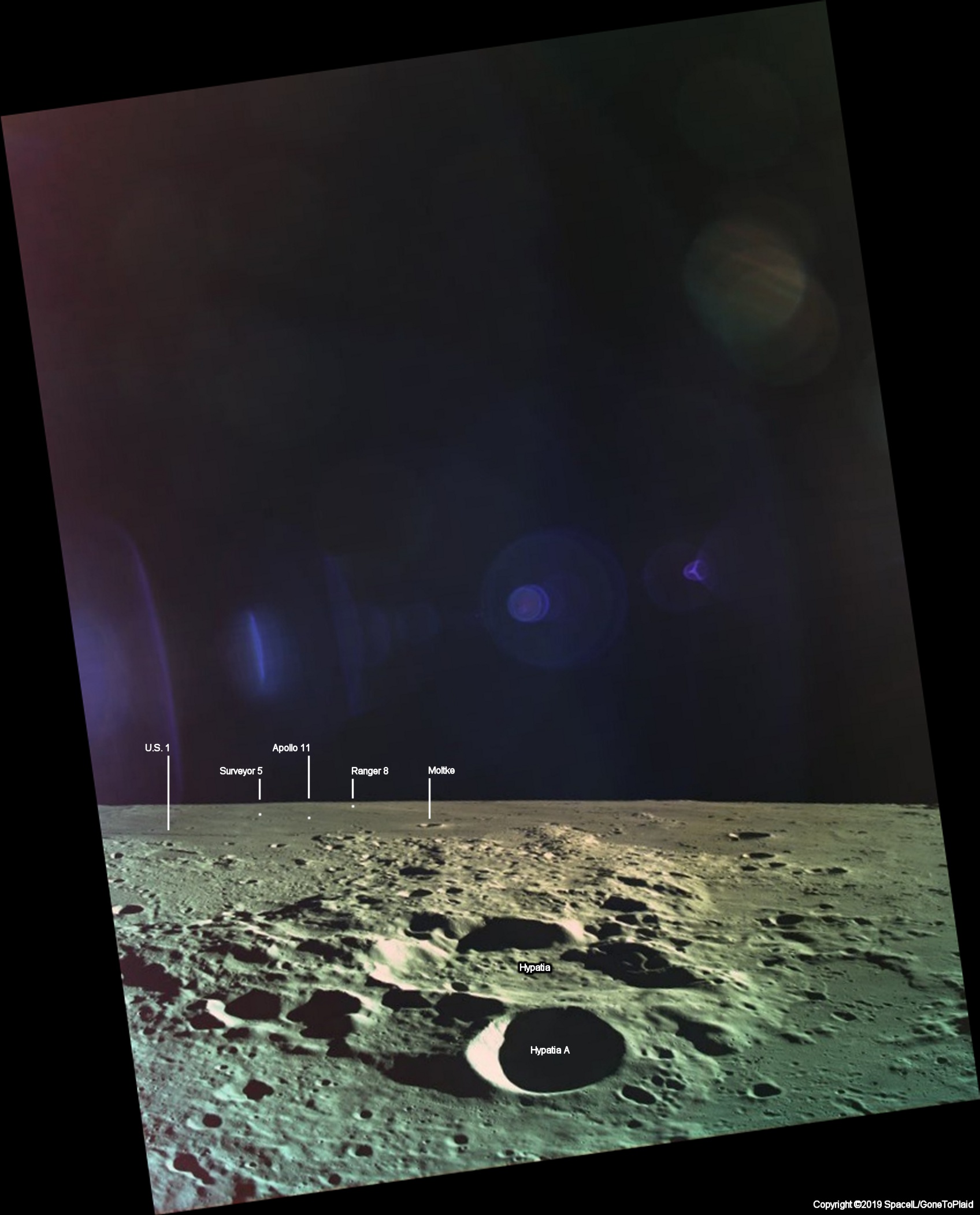
La NASA planea usar la sonda LRO para examinar el área de impacto del aparato Bereshit, con la esperanza de que los elementos del conjunto de reflectores de esquina láser no se hayan colapsado y se encuentren en la superficie de la luna.
Los reflectores se fijaron en la parte superior del dispositivo y, cuando se caía, podía rebotar, dispersarse, rodar y excavar en el suelo lunar.
Pero incluso si solo una parte del reflector está disponible para reflejar el pulso de luz, esto será arreglado por LRO.Un láser altímetro LRO (sonda orbital lunar de la NASA), diseñado para compilar mapas de altitud, enviará pulsos de luz láser al reflector de la esquina en el punto de impacto del aparato Bereshit, y luego medirá cuánto tiempo tarda la luz en regresar.
Usando esta técnica, los ingenieros de la NASA y SpaceIL planean poder localizar los restos del dispositivo Bereshit.
 Aunque también es interesante aquí, todavía hay fotos de la caída en SpaceIL, pero no las publican:- ¿Es esta realmente la última foto recibida de Beresheet? ¿Cuándo se tomó exactamente? Pregunto porque el cráter Hypatia está mucho más al sur que el sitio de aterrizaje planeado.
Aunque también es interesante aquí, todavía hay fotos de la caída en SpaceIL, pero no las publican:- ¿Es esta realmente la última foto recibida de Beresheet? ¿Cuándo se tomó exactamente? Pregunto porque el cráter Hypatia está mucho más al sur que el sitio de aterrizaje planeado.
- No, no es la última foto que se tomó. Tenemos una imagen que se tomó más cerca del aterrizaje, pero aún no se ha confirmado que se publique . Supongo que se publicará pronto.¿Qué pasará después con la misión Bereshit?Se anunció el desarrollo de un nuevo proyecto espacial, Bereshit 2.0. El primer ministro israelí, Benjamin Netanyahu, prometió que el estado tomaría parte en un segundo intento de enviar una estación automática a la luna.“Vamos a lanzar Bereshit-2. El Estado de Israel participó en el lanzamiento de la primera nave espacial y participará en el lanzamiento de la segunda. Espero que esta vez todo tenga éxito. En este caso, realmente nos convertiremos en el cuarto país del mundo en aterrizar en la luna ”, dijo Netanyahu en una reunión del gobierno.Está previsto que el proyecto Bereshit 2.0 sea más serio y costoso (en comparación con el primero), pero seguirá siendo privado.
El primer ministro israelí, Benjamin Netanyahu, prometió que el estado tomaría parte en un segundo intento de enviar una estación automática a la luna.“Vamos a lanzar Bereshit-2. El Estado de Israel participó en el lanzamiento de la primera nave espacial y participará en el lanzamiento de la segunda. Espero que esta vez todo tenga éxito. En este caso, realmente nos convertiremos en el cuarto país del mundo en aterrizar en la luna ”, dijo Netanyahu en una reunión del gobierno.Está previsto que el proyecto Bereshit 2.0 sea más serio y costoso (en comparación con el primero), pero seguirá siendo privado. SpaceIL también se hará cargo de la gestión principal del nuevo proyecto Bereshit 2.0 y seguirá siendo una organización sin fines de lucro.Duración prevista del proyecto "Bereshit 2.0": 2-3 años.Es maravilloso cuando el país, los ingenieros y las personas no dejan de creer en la victoria.
SpaceIL también se hará cargo de la gestión principal del nuevo proyecto Bereshit 2.0 y seguirá siendo una organización sin fines de lucro.Duración prevista del proyecto "Bereshit 2.0": 2-3 años.Es maravilloso cuando el país, los ingenieros y las personas no dejan de creer en la victoria. ¡Ningún sueño está fuera de tu alcance, si realmente lo quieres!Y para el postre :modelo Lego de Beresheet
¡Ningún sueño está fuera de tu alcance, si realmente lo quieres!Y para el postre :modelo Lego de Beresheet