Hola querido habratchitel!No han pasado ni cuatro años desde que el primer modelo de trabajo de nuestro
GPS subacuático vio la luz, desde entonces
comimos una libra de sal e hicimos un montón de varios sistemas y dispositivos, pero por la voluntad del destino, una prueba importante hasta ahora ha pasado por alto a nuestro primogénito. En este artículo te diré cómo te fue.
Todos los que estén preocupados por el tema de los robots submarinos, su control y navegación, ¡bienvenidos al gato en nuestro kayak congelado en las aguas de abril del embalse de Volgogrado!

(¡Akhtung! ¡Hay muchas fotos debajo del corte!)
"... el verdadero lugar de la nave, aunque se sabe, pero no es accidental,
lo es, pero no se sabe en qué punto ".
Aleksishin V.G. y otra navegación práctica, 2006. p. 71.
¿De qué se trata todo esto?
Para aquellos que no tienen absolutamente ningún tiempo para leer, describiré brevemente el problema:
El GPS no se detecta bajo el agua y la comunicación por radio no funciona, casi toda la navegación se realiza mediante acústica, y la comunicación se realiza mediante acústica, cable y, muy a menudo, en agua clara, utilizando
luz .
Para los recién llegados, tradicionalmente proporcionaré enlaces a nuestras publicaciones anteriores en el centro, donde contamos todo sobre comunicaciones y navegación subacuáticas: desde la historia de la creación de nuestro GPS subacuático y la transmisión de sonido de "video" a través del agua hasta instrucciones sobre cómo hacer una antena hidroacústica simple a partir de basura:
-
GPS subacuático desde cero por año-
Hicimos el módem sonar más pequeño del mundo-
Sobre el efecto de las cianobacterias en las funciones del habla del presidente-
Hacer una simple antena de sonda fuera de la basura-
Sesión de transmisión de sonido de video a través del agua con exposición-
"GPS" subacuático en dos transceptores-
Navegación bajo el agua: Teniendo no teniendo - estás condenado al éxito-
GPS subacuático: continuaciónLos drones que vuelan y ruedan, se arrastran por el suelo y flotan en la superficie transmiten video de sus cámaras en tiempo real, y a veces coordenadas GPS, y el operador siempre sabe dónde está ubicado su dispositivo, además, a menudo el operador puede verlo.
Con los vehículos submarinos (TNPA o ROV), todo es algo diferente. Al dejar que el dispositivo entre en aguas oscuras, puede estar seguro de una sola cosa: definitivamente está bajo el agua.
Un poco más profundo en el problema.
Los dispositivos vienen en diferentes clases, dividiéndose por tamaño y tarea. Las más simples y pequeñas (como la nuestra), las de inspección, son solo una cámara de video en un cable con motores. Los más complejos y más grandes pueden equiparse con manipuladores y otros dispositivos interesantes,
algunos especímenes del tamaño de una gacela se completan con un barco especializado,
piratas y una tripulación de embarque y tienen una capacidad total de más de 200 hp. Las longitudes de cable pueden ser de decenas a cientos de metros en dispositivos pequeños y alcanzar miles de metros en dispositivos grandes de gran tamaño.
TNLA se controla nominalmente mediante retroalimentación visual: al observar la imagen transmitida desde las cámaras de la cámara por cable, a veces están equipadas con sonares, ya que a veces el agua
siempre está turbia.
Este enfoque tiene exactamente un inconveniente: al ver en el monitor una imagen de un elemento de paisaje de interés, es absolutamente imposible decir exactamente dónde se encuentra.
Navegación submarina
Están luchando con este inconveniente utilizando sistemas de posicionamiento acústico. Como regla general, colocan un pinger (que emite periódicamente una señal especial) o una baliza de transpondedor en el dispositivo. Se detecta la señal pinger, se determina la distancia y luego, por el ángulo (o dos ángulos: horizontal y vertical) de la llegada de la señal y la distancia, se determina la ubicación del dispositivo. Dichos sistemas se denominan UKB (abreviatura de Ultrashort-Base). Se relacionan con el telémetro goniométrico y tienen una lista completa de desventajas, especialmente con respecto a esta tarea. Los extranjeros más simples
cuestan desde
17,000 euros , los nuestros
también están
allí , no son peores y más asequibles, pero aún no son gratuitos.
Para determinar los ángulos de llegada horizontal (y en sistemas antiguos y verticales, en el nuevo pinger transmite su profundidad) de la señal del encuestado o pinger, se necesita una antena de búsqueda de dirección. El dispositivo en sí no es simple y requiere instalación en una barra, que debe montarse en un barco. Por el alcance, la profundidad y el ángulo horizontal (o por alcance y dos ángulos), solo se determina la posición relativa del aparato. En este caso, la precisión disminuye al aumentar la distancia.
La precisión de determinar el ángulo depende de:
- características de la antena en sí y generalmente asciende a aproximadamente 0.5-3 °, y en los sistemas más avanzados alcanza 0.03 °, pero vale la pena el placer de solo dinero demoníaco. Permítame recordarle que 1 ° a una distancia de 1000 metros da una extensión de 17 metros (es decir, ± 17 metros).
- sobre qué tan bien se determina la posición de la antena (rodar y recortar);
- de condiciones hidrológicas específicas. Por ejemplo, es posible detectar no una señal directa, sino algo de reflexión o su suma, determinando así el ángulo de llegada de la señal reflejada. Y podía reflexionar desde cualquier cosa, incluso desde una dirección completamente diferente.
Después de determinar la distancia y el ángulo de llegada de la señal, debe vincular todo esto a la geografía. Es decir, debe conocer la posición geográfica de la antena de búsqueda de dirección y la dirección de su cero en relación con la dirección hacia el norte. Luego puede resolver el
problema geodésico directo y determinar la posición del vehículo submarino en coordenadas geográficas. Es decir, aún debe tener una brújula y un GPS en la antena.
En general, estoy convencido de que UHF debe aplicarse solo donde es completamente imposible usar sistemas de base larga.
Lo enfatizo, absolutamente. Por ejemplo, cuando se coloca un objeto remolcado, y necesita recorrer una distancia muy larga. En este caso, será necesario mover los elementos de una base larga muy a menudo y esto conllevará el costo de demasiado tiempo y esfuerzo, o, por otro ejemplo, será imposible instalar boyas de una base larga en la superficie debido a la gran profundidad: cuerdas muy largas y, en general, se requerirá el esquema de anclaje muy complicado En todos los demás casos, te conjuro: usa una base larga: es más fácil, más confiable y más preciso.
UKB es bueno e indispensable donde necesita encontrar algo, acercándose gradualmente y aumentando la precisión. Puede parecer que estoy en contra de UHF y de DB, pero solo estoy pidiendo el uso de equipos de acuerdo con su propósito. Al final, también hicimos el KGB, y a la luz de esto, es difícil acusarme de parcialidad.
Sistemas de largo alcance (DB): esto es cuando hay varios receptores o transmisores separados (por ejemplo, el GPS es un sistema de largo alcance). Mantienen su precisión dentro de la base, son mucho menos susceptibles al lanzamiento y generalmente proporcionan resultados mucho mejores, ya que se relacionan con los sistemas telémetro o de telémetro diferencial.
Durante mucho tiempo no pude responder la pregunta: ¿por qué todos intentan martillar las uñas con una pala? Pero con el tiempo, mis colegas y yo llegamos a una conclusión decepcionante: en primer lugar, la gente piensa de manera muy simple: una antena y un pinger son más fáciles que varios elementos de una base larga que están muy separados entre sí. En segundo lugar, hasta hace poco, los sistemas de bases de datos estaban representados solo por los llamados base inferior, cuya instalación requiere tiempo y dinero muy serios.
Durante mucho tiempo hemos estado en una cruzada contra el
analfabetismo de los usuarios del orden establecido de las cosas. Que comenzó cuando hicimos el primer ejemplo de nuestro GPS submarino, que es un sistema de base larga con una superficie en lugar de una base inferior.
GPS bajo el agua
Volvamos al héroe de la prueba de hoy. El sistema de navegación está representado por la propia base de navegación, formada por cuatro
boyas-repetidores flotantes
de la señal GNSS:

Las boyas antes de comenzar el trabajo se instalan en un estanque con la ayuda de anclas de
piedras y cuerdas. Todo lo que hay que hacer es soltar la boya anclada, antes de hacer clic en el interruptor. Eso es realmente todo lo que hay que hacer.
Otro elemento del sistema es un receptor de navegación ubicado en un objeto submarino:

El receptor de navegación
RedNODE (cilindro amarillo pequeño) está montado en la parte posterior de la unidad. Está alimentado por la red a bordo del robot y transmite datos a través del cable del dispositivo.
Dado que las boyas solo emiten, y los receptores solo aceptan (operan de acuerdo con el esquema de rango diferencial) y nadie molesta a nadie, entonces, en un conjunto de boyas en un área de agua, cualquier número de receptores puede funcionar. Es decir, en teoría, toda una flota de vehículos submarinos y buzos en cualquier cantidad y proporción pueden navegar teóricamente.

Debido al apuro, más bien inmovilizamos el receptor de navegación y agregamos algo de flotabilidad hecha de material denso de aislamiento térmico.
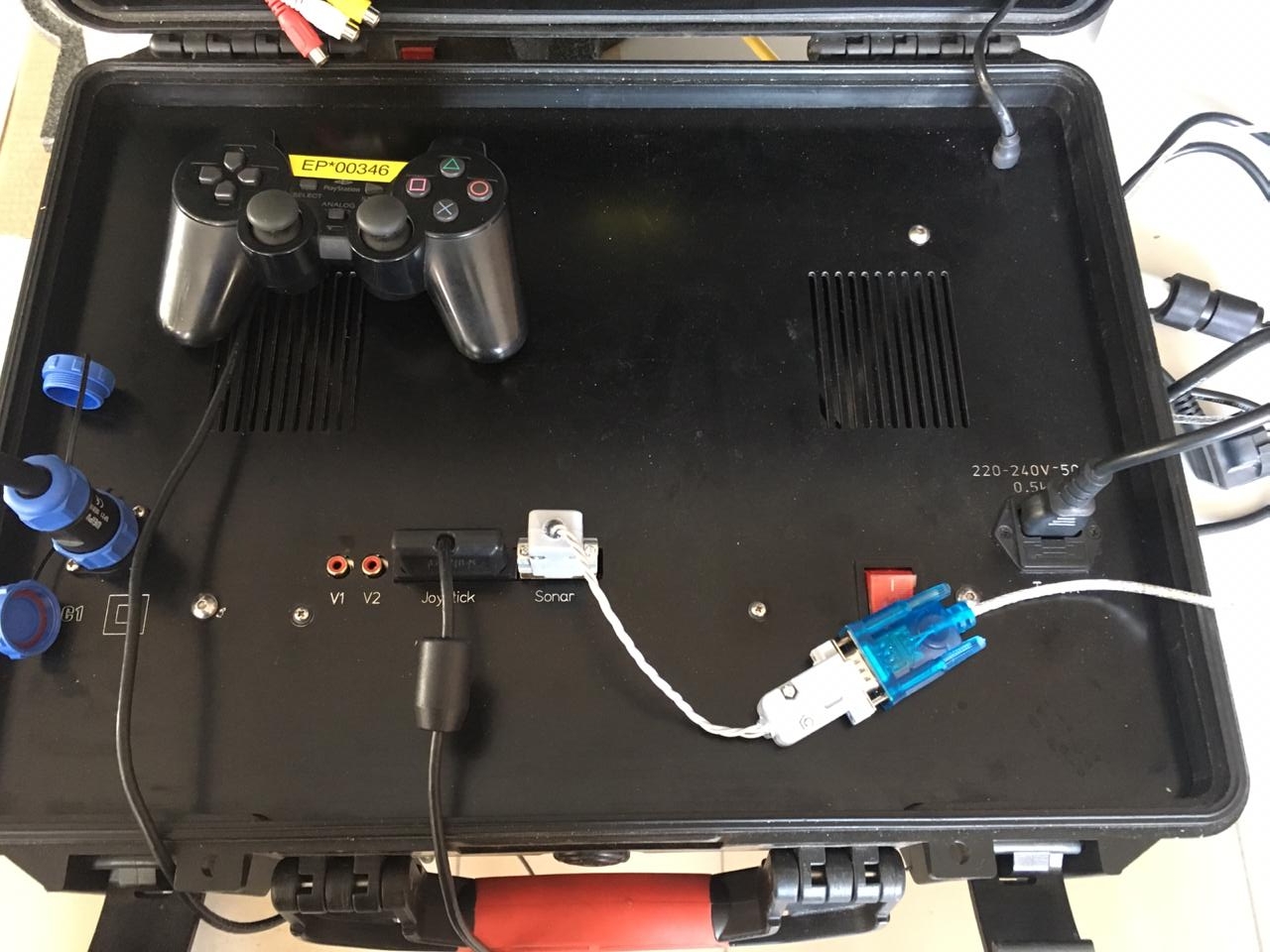
Los datos del receptor ingresan a la caja de control y se ingresan en cualquier computadora portátil a través del convertidor RS232 <-> USB (conector "Sonar" en la foto).
Las coordenadas en este sistema se generan en el receptor (es decir, estrictamente terminológicamente, el sistema es un sistema de navegación y no un sistema de posicionamiento). Pero dado que los TNLA funcionan con un cable, en principio, no debería haber problemas para transferir la ubicación calculada en el dispositivo al cable hacia arriba. Por cierto, el receptor de navegación emula un receptor GNSS normal y se puede conectar directamente como el receptor GPS de superficie más común, por ejemplo, a la aplicación
SAS.Planet , que hacemos.
El posicionamiento de los robots submarinos fue la idea principal que nos capturó en 2015, cuando comenzamos a desarrollar nuestro GPS submarino. La ironía del destino es que fue esta aplicación la que permaneció sin reclamar hasta 2018: el sistema se utilizó principalmente en el rendimiento de buceo.
Esto se debe en parte al hecho de que los fabricantes de TNLA son muy reacios a modificar sus dispositivos, en parte debido al hecho de que los usuarios tienen un fuerte prejuicio de que organizar las boyas es difícil y requiere mucho tiempo.
Ahora el aparato de la clase de examen lo están haciendo todos y cada uno, literalmente, ya hemos perdido la cuenta. Aquí hay una lista de fabricantes lejos de ser completa para mayor claridad:
- Todo el
TOP-10 2019- Y otro
TOP-12 2019-
E incluso otro TOP , esta vez dispositivos de presupuesto
- Nuestro
ROVBUILDER- El
aclamado OpenROV-
aparato canadiense
-
GNOM nacional
- Sospechosamente algo que recuerda a
Blueye- Otro
dispositivoHay una docena o dos equipos universitarios diferentes, además, si nos fijamos, todavía hay un montón de proyectos similares, dado que ni siquiera hemos tocado los dispositivos más grandes de la clase trabajadora y los dispositivos autónomos (los llamados AUV o AUV).
Difieren poco entre sí y tienen una funcionalidad muy similar. Creemos que los fabricantes de robots que equiparán sus dispositivos con un sistema de navegación simple y confiable recibirán una ventaja decisiva.
Cuando comenzamos los tres, uno de nosotros (
Creathor ) estaba en Moscú, ocupándose de todos los problemas organizativos, financieros y de marketing, y yo y
StDmitriev estábamos en Volgogrado, y nos
sumergimos hasta las rodillas en agua fría juntando 4 boyas de un bote inflable comprado en el decatlón Con el tiempo, nos llevó de 15 a 30 minutos. Esta es en parte la razón por la cual, cuando me dicen que poner boyas es difícil y largo,
mi mano alcanza al Mauser y mi rostro generalmente expresa desconcierto.
Aún más profundo
Esta vez, realizando las cuatro pruebas, ajustamos todo en dos autos de pasajeros:

Dicho equipaje fue requerido para la prueba:
- Vehículo submarino ROVBUILDER RB-150 con cable de 100 metros y caja de control
- Estuche con cuatro boyas RedBASE
- generador de gasolina de 800 vatios
- Doble kayak inflable "Shuya"
- Mesa plegable con cuatro sillas plegables.
- Cuatro losas con cuerdas de 20 metros como anclas
- laptop
- Stock de alimentos durante 5-6 horas para cuatro personas.
Con toda la aparente simplicidad, no podríamos trabajar con el sistema UHF con un conjunto de botes de este tipo: para montar la antena UHF, se necesita un bote con un fondo duro y una varilla. Al mismo tiempo, se requeriría estar en el agua todo el tiempo. Que, por ejemplo, a 0 ° el aire no es muy cómodo, y a veces es simplemente imposible (ver "viento, olas, cabeceo").
El "puesto de control" se implementó en unos 10 minutos, y en nuestro caso se veía así:

Tradicionalmente, todas las pruebas que requieren un embalse algo espacioso se llevan a cabo en la
desembocadura del río Pichuga , en el lugar donde desemboca en el embalse de Volgogrado.
Sumérgete más
Mencioné que las boyas generalmente se instalan en 15-30 minutos y esta vez no fue la excepción. Además, comencé especialmente el cronómetro, y dos personas en un kayak lograron hacerlo en 24 minutos, en remos, luchando con el viento y la emoción, como los verdaderos Papanins.

La foto muestra cómo se encuentran las boyas en un pequeño kayak inflable. Las cuatro piezas.
Puede pensar que el dispositivo también está sumergido desde un bote, pero no del todo: el dispositivo se lleva al agua desde la orilla con la ayuda de una persona equipada con un par de botas de goma:

Y aquí están las primeras imágenes del mundo submarino:
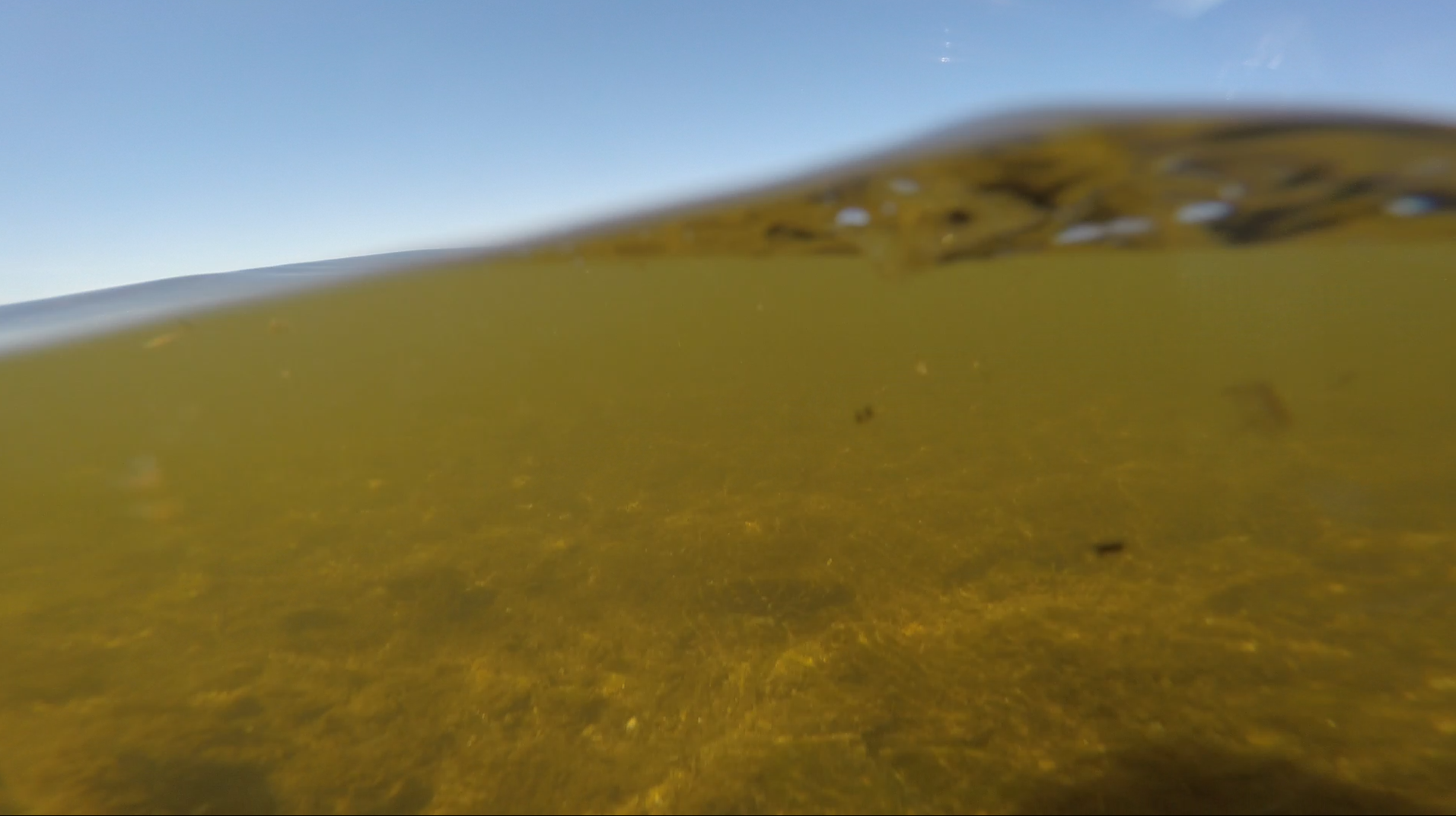

Sí, este no es el Mar Rojo para usted :-) El agua parece transparente, pero de hecho la visibilidad cerca de la costa no supera los 1-2 metros.
Un problema grave se hizo evidente de inmediato: en la pantalla del operador en un día soleado, nada es claramente visible (excepto su reflejo):

Al mismo tiempo, el GoPRO HERO3 + se instala como una cámara en el robot. Estábamos molestos y desanimados por este hecho, pero era completamente imposible controlar la imagen, en vista de la pantalla intermitente infernal. Tal vez alguna pantalla eliminará este inconveniente. Algunos fabricantes de robots, por cierto, equipan sus productos con gafas VR.
Después del hecho, al subir videos desde la cámara de la cámara, nuestra frustración se hizo aún más profunda: la imagen es, en principio, muy buena, y es muy posible trabajar con ella. ¡Qué pena que no hayamos visto todo esto en el proceso!
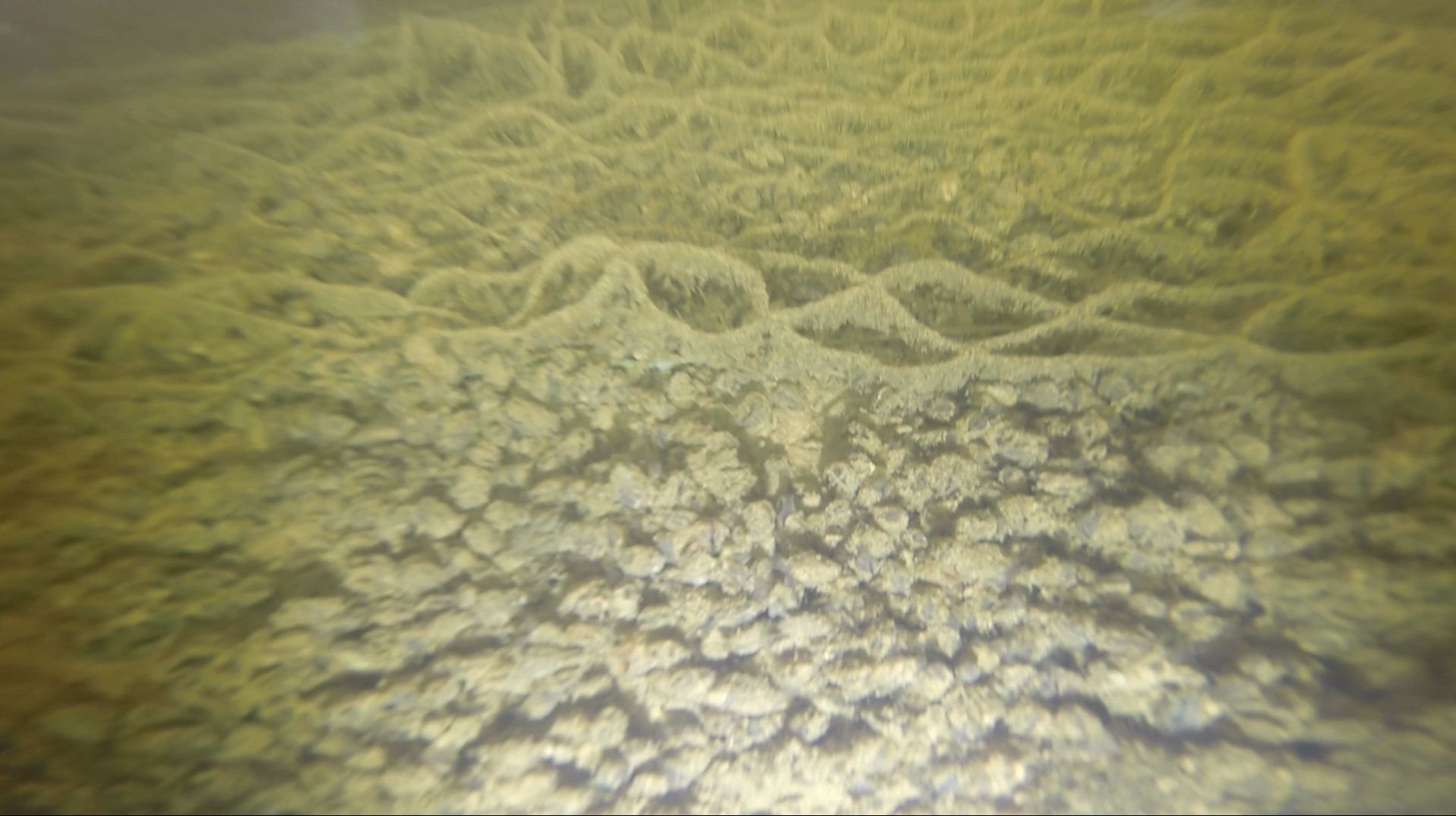
Y aquí está el primer toque del fondo y los elementos del paisaje "lunar" a una profundidad de 13 metros:

Literalmente, un par de segundos después, después de navegar un poco más adelante, el dispositivo se topó con un tronco inundado, cubierto de pequeñas conchas:

En realidad, la calidad de la imagen es ligeramente mejor, pero tengo que tomar capturas de pantalla del video capturado con el GoPRO integrado.
En la siguiente imagen, si mira de cerca, en la esquina superior derecha puede ver el primer pez encontrado en el camino del
crucero postal :

En el proceso de prueba, aún no sabíamos que la cámara estaba escribiendo una imagen buena y, a veces excelente, y estábamos muy desconcertados por la necesidad de controlar el dispositivo prácticamente a ciegas.
Sin embargo, decidieron apegarse a un escenario predeterminado. Se suponía que inundaría un objeto fácilmente visible desde un bote, guardaría las coordenadas de este lugar con un teléfono GPS y luego trataría de llegar a este lugar con un robot, guiado por las indicaciones de nuestro sistema de navegación.
Dado que el texto generalmente se lee en diagonal sin la debida atención a los detalles, concluyo que en este sistema en el transmisor acústico de las boyas, el devanado del transformador elevador debe ser de madera, mientras que el EMF de madera se inducirá en él y la corriente de madera fluirá.
En uno de los pasajes sobre la parte inferior, la cámara de la cámara capturó una red de pesca ahogada:
En este punto, las vistas que obtuvimos bajo el agua en el proceso de prueba terminan allí.
Quien quiera evaluar la calidad del video con sus propios ojos, adjuntamos un enlace a
uno de los registros en YouTube . El registro se entrega sin ningún procesamiento y edición. Aquellos que lo deseen pueden llegar independientemente a la conclusión de la conveniencia de administrar y realizar acciones significativas bajo el agua (por ejemplo, buscar algo) solo por la imagen de la cámara, sin navegación.
Llegamos a la conclusión de que es completamente imposible controlar el dispositivo usando solo la imagen; Básicamente, nos guiamos solo por nuestro sistema de navegación, que en línea mostraba la ubicación actual del dispositivo en el mapa.
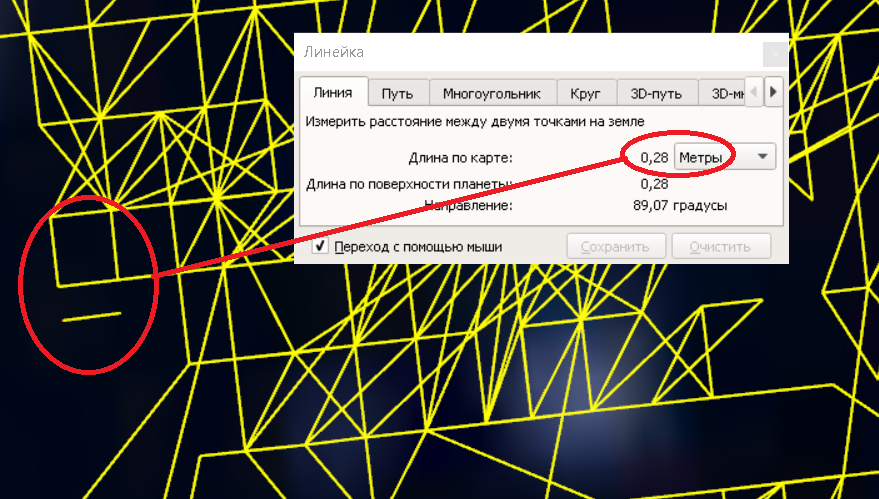
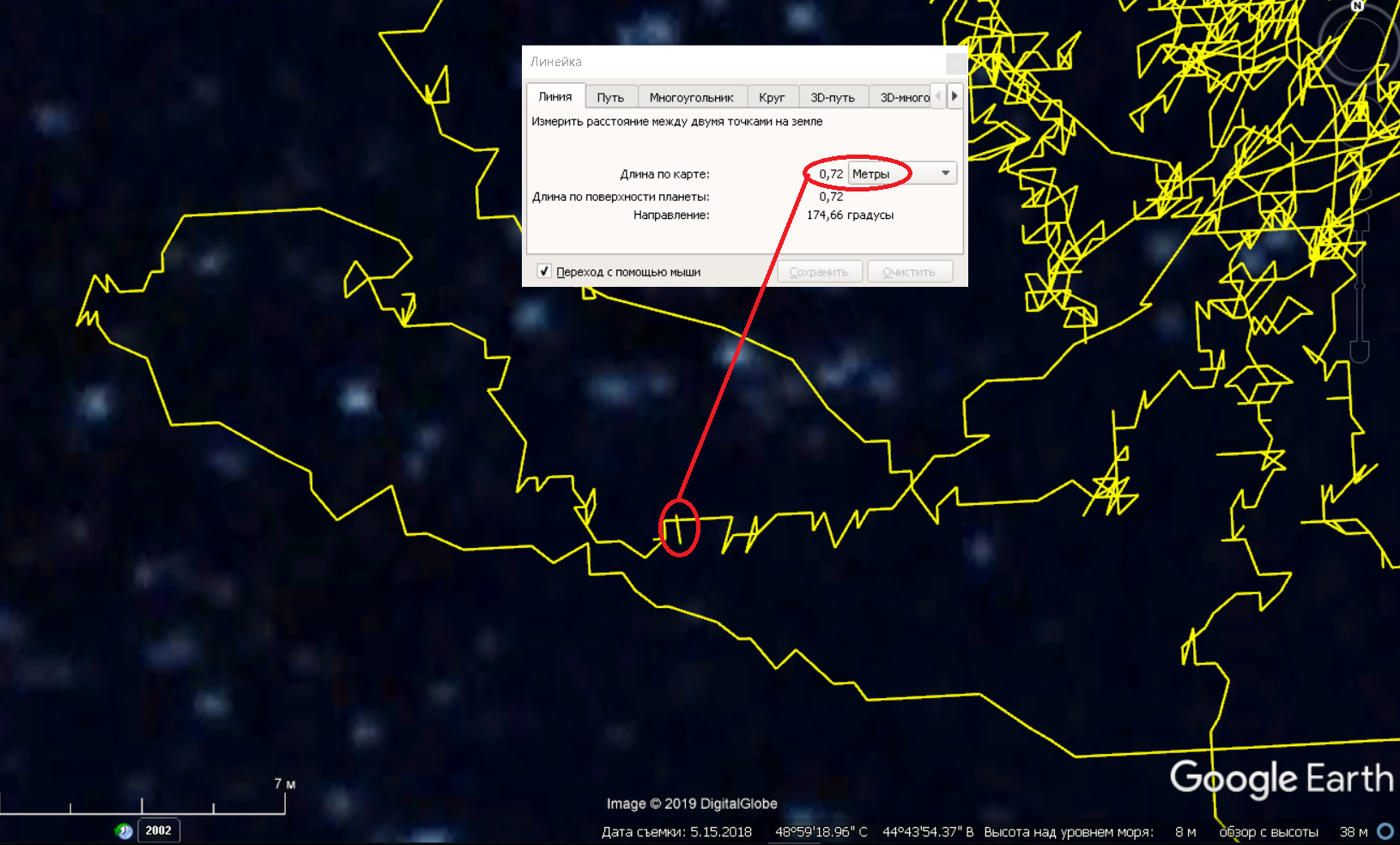
La resolución del sistema en un depósito real, que es de unos 30 centímetros, es agradable, como se puede ver en la cuadrícula dibujada por la pista:
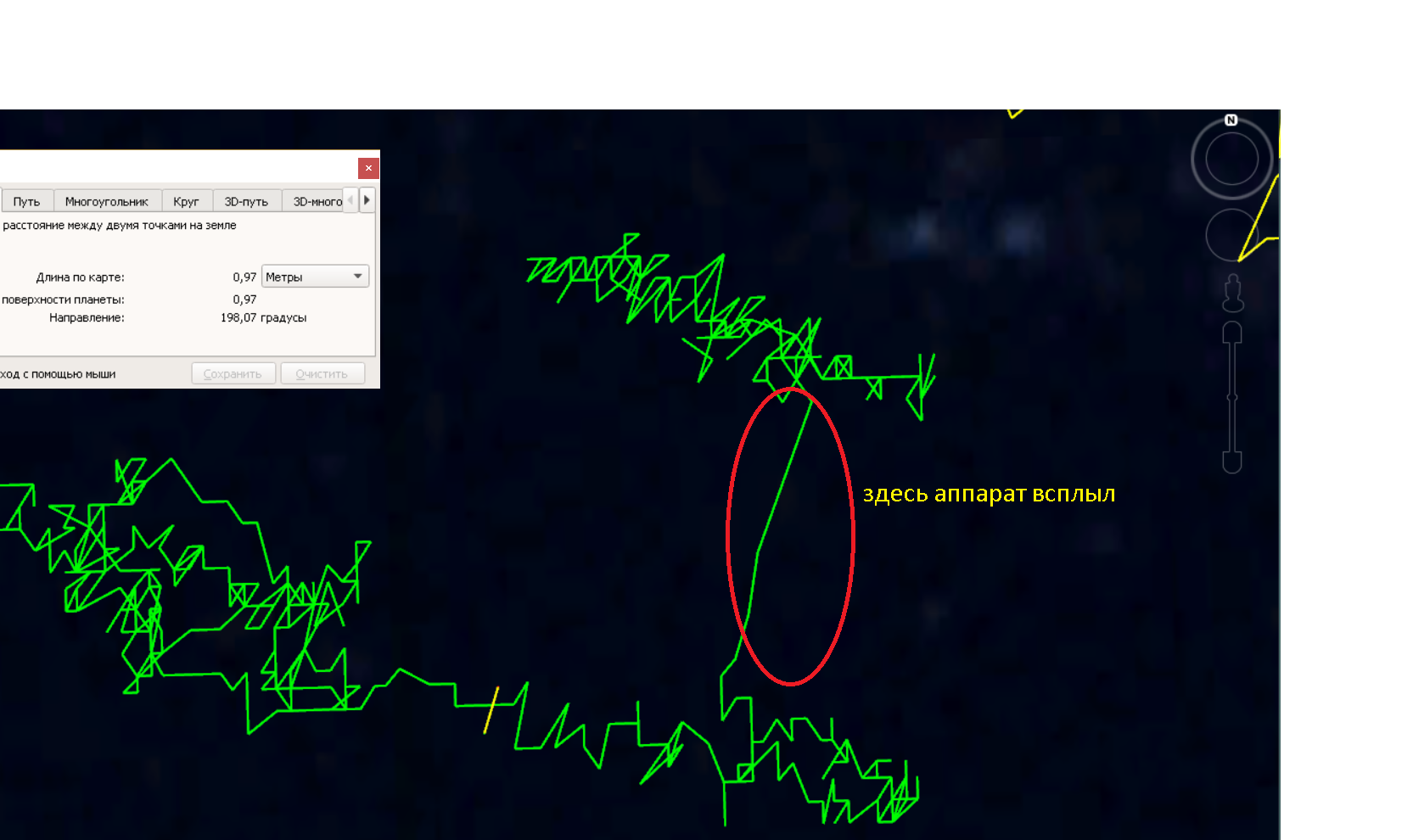
Como en otros casos, la extensión de los puntos durante el movimiento se encuentra en el rango de 1-1.5 metros:
La pista final del movimiento del dispositivo se ve así:
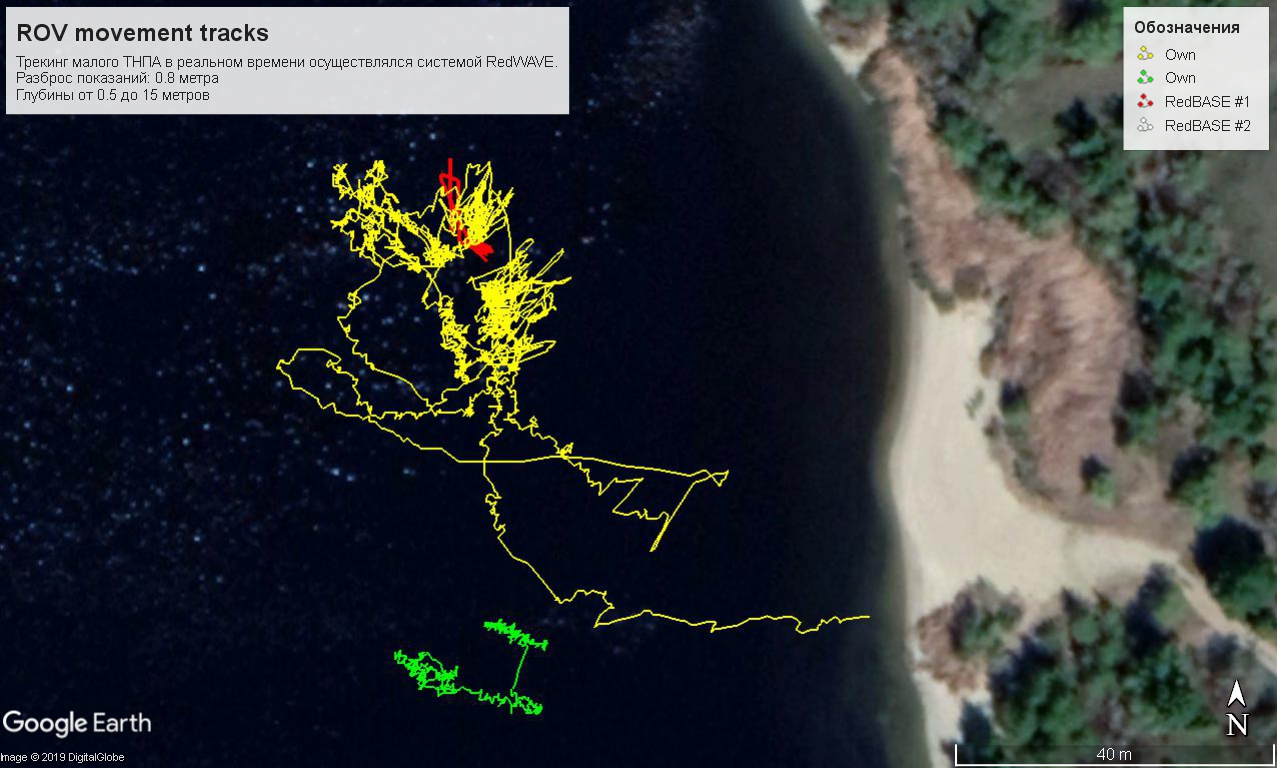
A pesar de que no calculamos el lugar de trabajo un poco y casi la mitad de la pista (la parte izquierda de las líneas rojas) se encuentra fuera de la base, es decir fuera de la figura de la boya, donde el sistema debería funcionar mucho peor. Sin embargo, con la excepción de algunas emisiones, el sistema funcionó normalmente.
Y en uno de los pasillos, el dispositivo se acercó mucho al sitio propuesto de inundación del objeto:

Pero mirando cuidadosamente una hora o más del video grabado por la cámara a bordo del vehículo, nunca vimos nuestro objeto deseado.
Puede haber varias razones para esto: en primer lugar, para nosotros, esta es literalmente la primera experiencia de controlar el dispositivo en un cuerpo de agua real, y en segundo lugar, la pantalla de deslumbramiento nos privó de la oportunidad de "en línea" observar lo que sucede en el agua cerca del dispositivo. En tercer lugar, el dispositivo está reaccionando
feroz y frenéticamente al "giro del volante" y es muy difícil controlarlo desde una posición desacostumbrada, incluso es difícil mantener un movimiento directo.
Por si acaso, adjunto la
pista resultante para que aquellos que estén interesados puedan torcerla.
Parte inferior
En conclusión, quiero decir que a todos nos gusta que una piedra cayó del alma: finalmente probamos el sistema para su propósito previsto.
Obtuvimos un muy buen resultado (¡y experiencia!), Controlamos un vehículo submarino, cocinamos sopa de champiñones con carbón, tomamos una foto y generalmente tuvimos un día positivo.¡Gracias por su atención, como siempre, estaremos infinitamente agradecidos por los comentarios y las críticas constructivas!UPD!
Armamos un video corto con algunas explicaciones . Incluyendo el proceso de visualización de la trayectoria del dispositivo en tiempo real en SAS.