Si alguna vez ha escrito software para controlar un brazo de robot o cualquier mecanismo similar a un robot en general con más de tres grados de libertad, sabe que la mayoría de las veces se tarda en programar los movimientos. Ahora imagine que construyó un brazo robótico conectando los enlaces y las unidades a su gusto, y el software determinó la longitud de los enlaces, su ubicación, ángulos de rotación, etc.
Eso es exactamente lo que hicieron los investigadores de Columbia Research cuando escribieron un software que
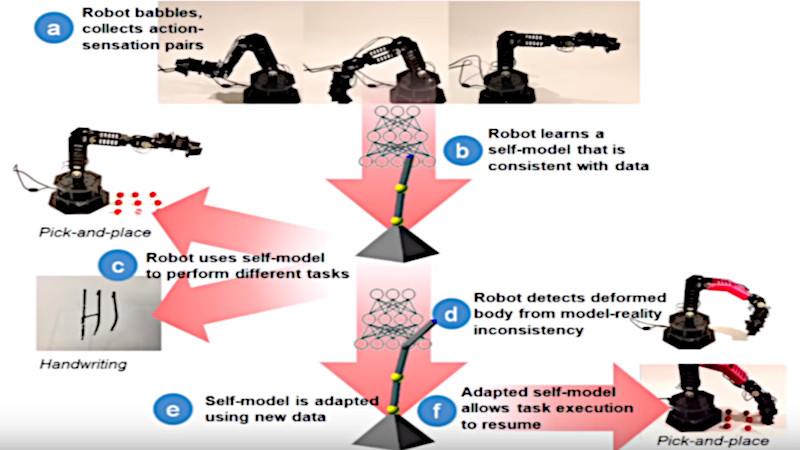
aprende cómo configurar un brazo robótico controlado por él , sin tener una idea inicial de la física, la geometría o las características dinámicas de los motores. Inmediatamente después del primer lanzamiento, no sabe qué forma del robot, cómo funcionan sus motores, cómo y qué afecta cada uno de ellos. Durante aproximadamente un día y medio, haciendo al principio movimientos cautelosos que parecen aleatorios y recibiendo retroalimentación sobre lo que está sucediendo, el software que usa el entrenamiento en profundidad configurará el simulador integrado para que el robot virtual sea lo más físico posible.
El gerente de proyecto Lipson y su estudiante graduado Robert Kwiatkowski están experimentando con un brazo robot articulado con cuatro grados de libertad. Al comienzo de la capacitación en software, el modelo era inexacto y no se determinó el orden de conexión de los enlaces. Después de 35 horas de entrenamiento, el modelo correspondía a la realidad con una precisión no inferior a cuatro centímetros. Luego, el software obligó al roboruk a tomar y mover objetos, mientras que hubo una recalibración adicional después de cada movimiento según el modelo formado solo por un entrenamiento independiente.
Para determinar si dicho software puede detectar daños en el brazo del eje, se imprimió uno similar pero especialmente deformado en lugar de una de las partes. El software determinó que había cambiado e hizo los cambios apropiados al modelo. Pronto, realizó las tareas de levantar y mover objetos solo un poco peor.
Dado que la idea interna del software sobre el dispositivo del robot no es estática, esto le permite no solo actuar mejor y mejor, sino también adaptarse al daño y los cambios estructurales. Además, todo continuará funcionando con el desgaste gradual de las piezas y su reemplazo con formas ligeramente diferentes.
Por supuesto, un roboruk administrado por dicho software no pronto será tan preciso como
Dexter, un roboruk con software tradicional que le otorgó a sus desarrolladores un premio en la competencia Hackaday 2018 , pero es interesante ver cómo funciona: