Comenzó el quinto mes terrestre de trabajo en el lado lejano de la luna del módulo de aterrizaje Chang'e-4 y el rover Yutu-2.
Ambos dispositivos sobrevivieron con éxito la fría cuarta noche iluminada por la luna, ahora han salido del modo de suspensión y continúan su investigación sobre la superficie compleja de la parte posterior de la luna y el espacio exterior circundante.
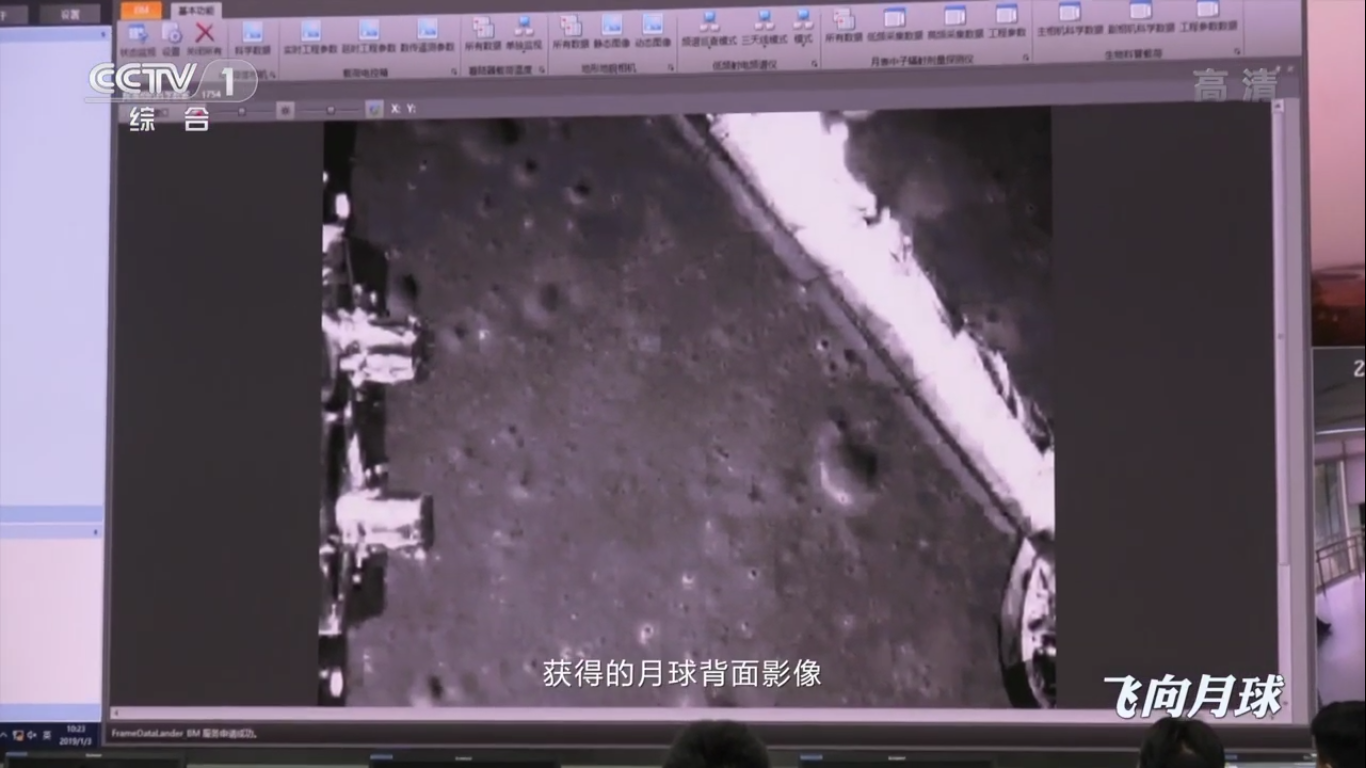
Nuevas fotos de la parte posterior de la luna, los momentos de la misión de lanzamiento y aterrizaje.
Atención, hay muchas fotos dentro de la publicación.Materiales publicados anteriormente sobre la misión Chang'e-4: El rover Yutu-2 salió del modo de suspensión en la mañana del 28 de abril de 2019, en la noche del 28 de abril, el módulo de aterrizaje Chang'e-4 también se despertó, y ambos vehículos comenzaron su quinto turno de día en la Luna.
Por la noche, al otro lado de la luna, según los sensores de los módulos Chang'e-4, la temperatura en la superficie lunar cae (mínimo) a menos 190 grados centígrados.
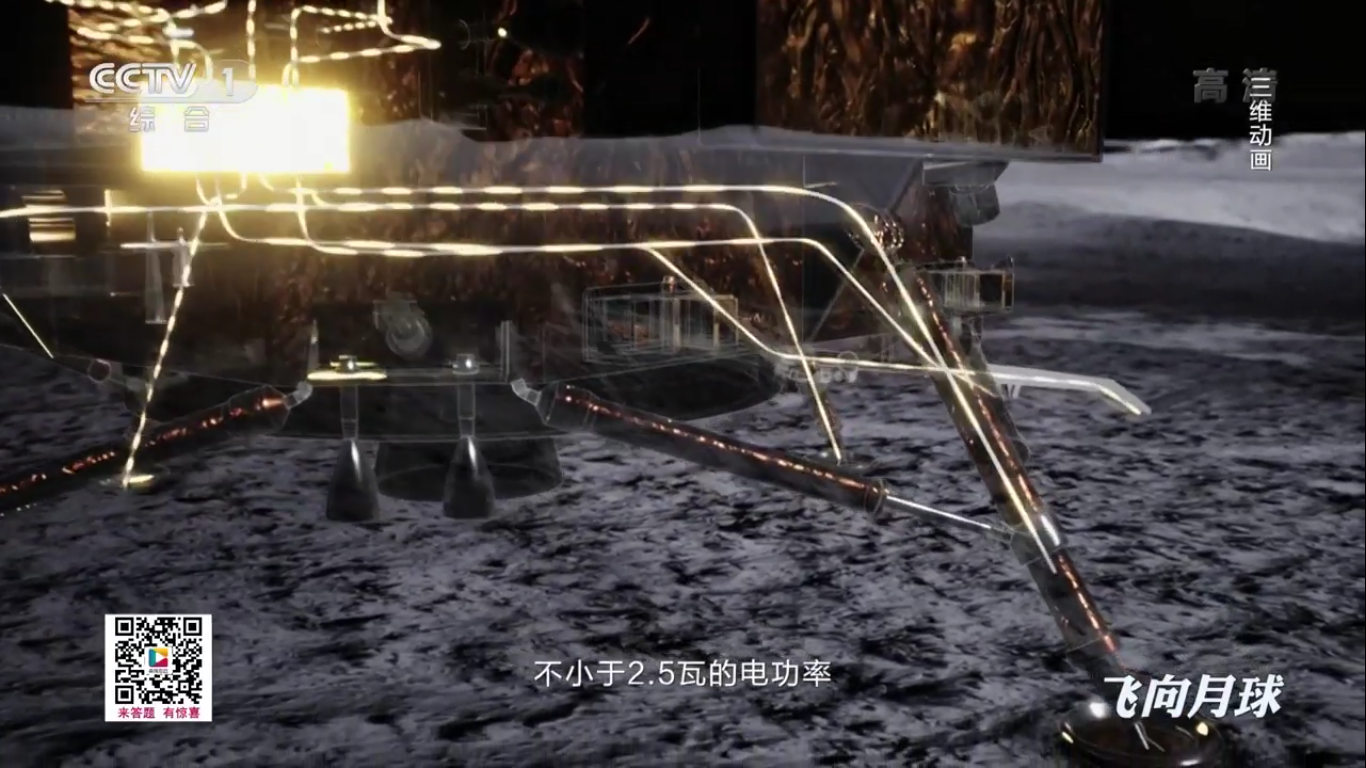
Las unidades térmicas desarrolladas en el Centro Nuclear Federal de Rusia (VNII Física Experimental (VNIIEF) son responsables de calentar los módulos Chang'e-4 durante una noche iluminada por la luna, estas son fuentes de calor de radiación (RIT) y fuentes de electricidad de radioisótopos (RTG) diseñados para alimentar sistemas chinos misión lunar
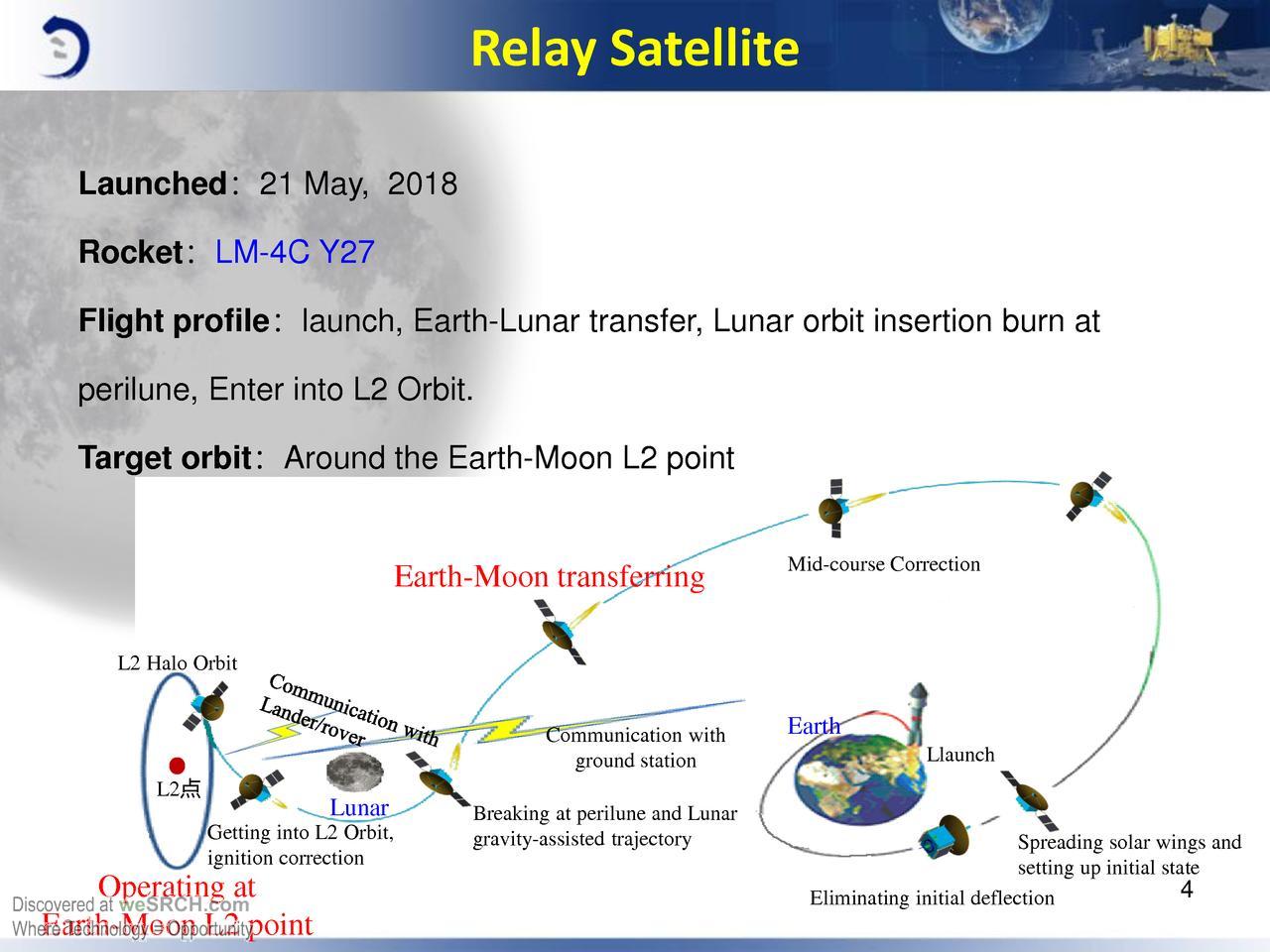
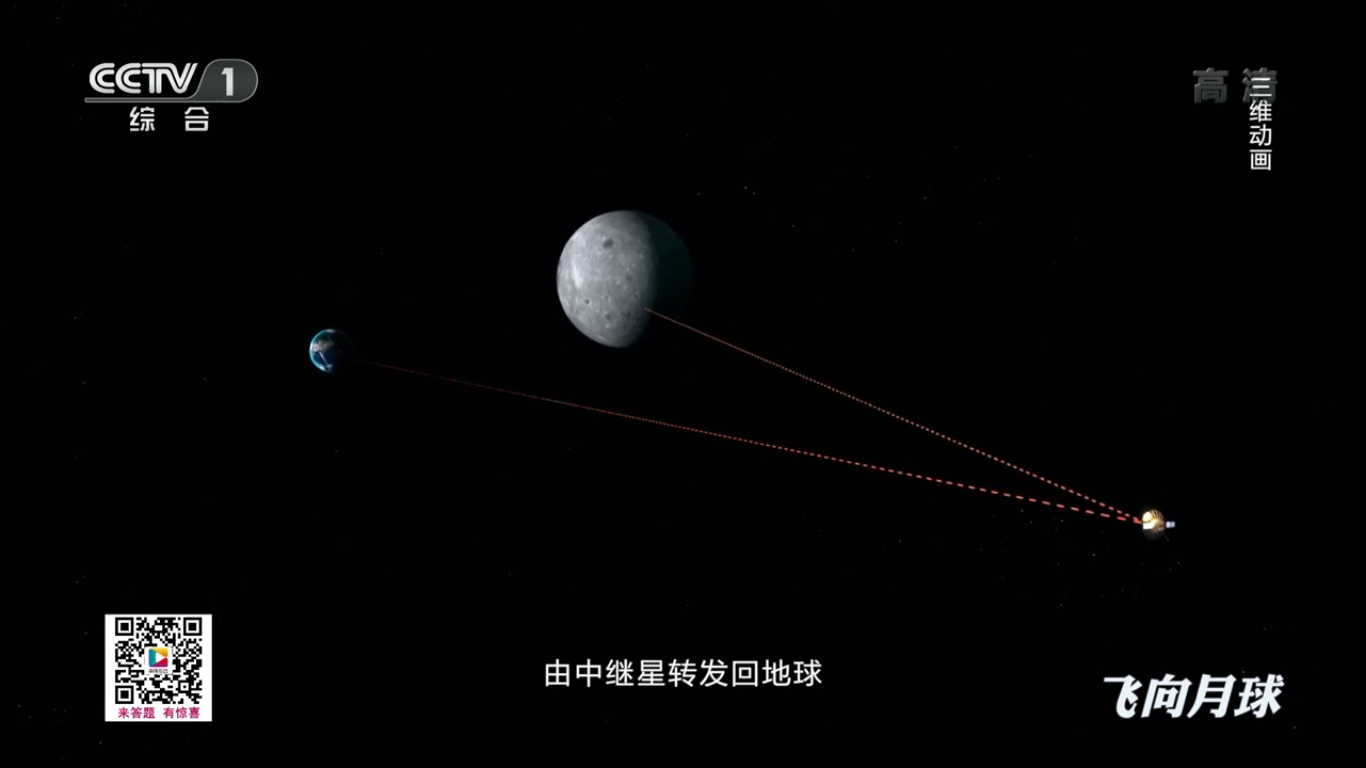
Datos sobre el proyecto y los módulos de la misión lunar Chang'e-4:21 de mayo de 2018: se lanzó el satélite de retransmisión Tseyuqiao (cuadragésimo puente) desde el cosmódromo chino de Xichang, es necesario para organizar la comunicación entre la Tierra y el otro lado de la luna.
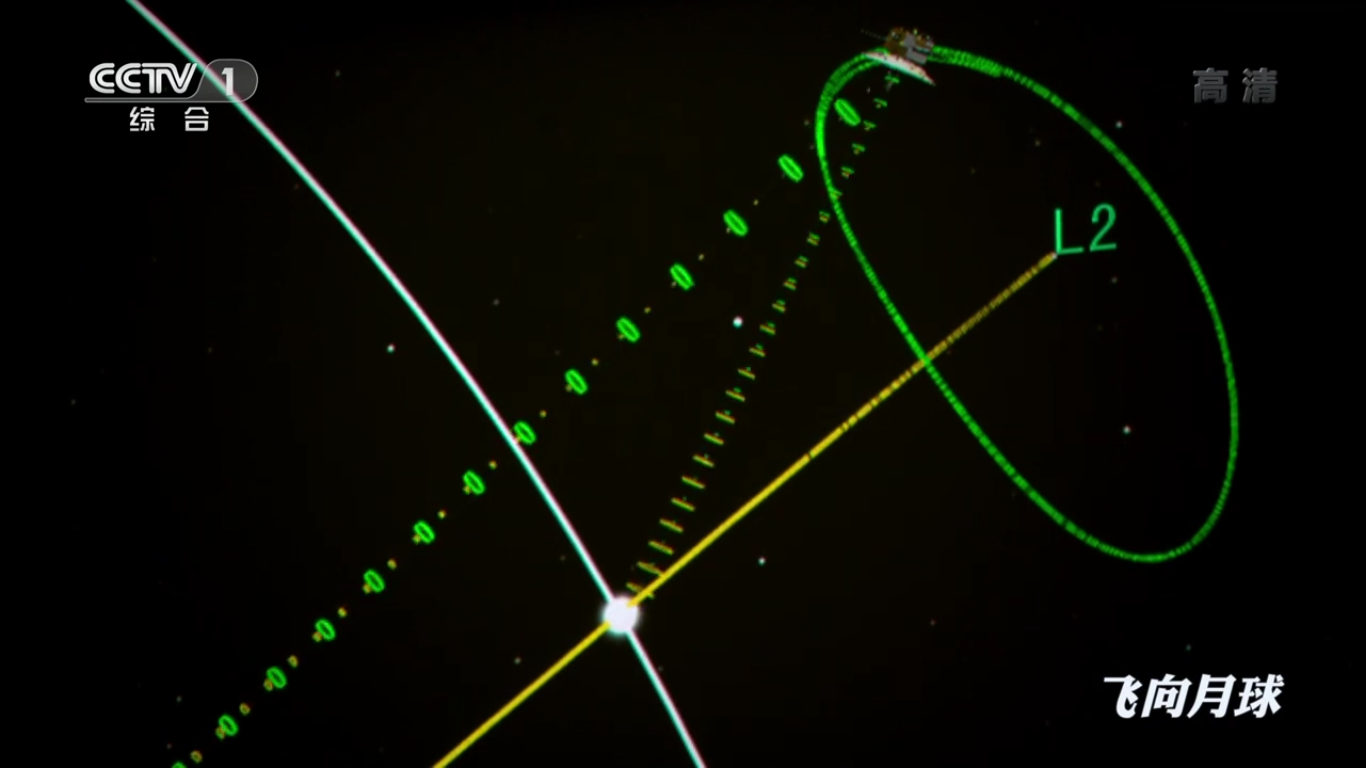
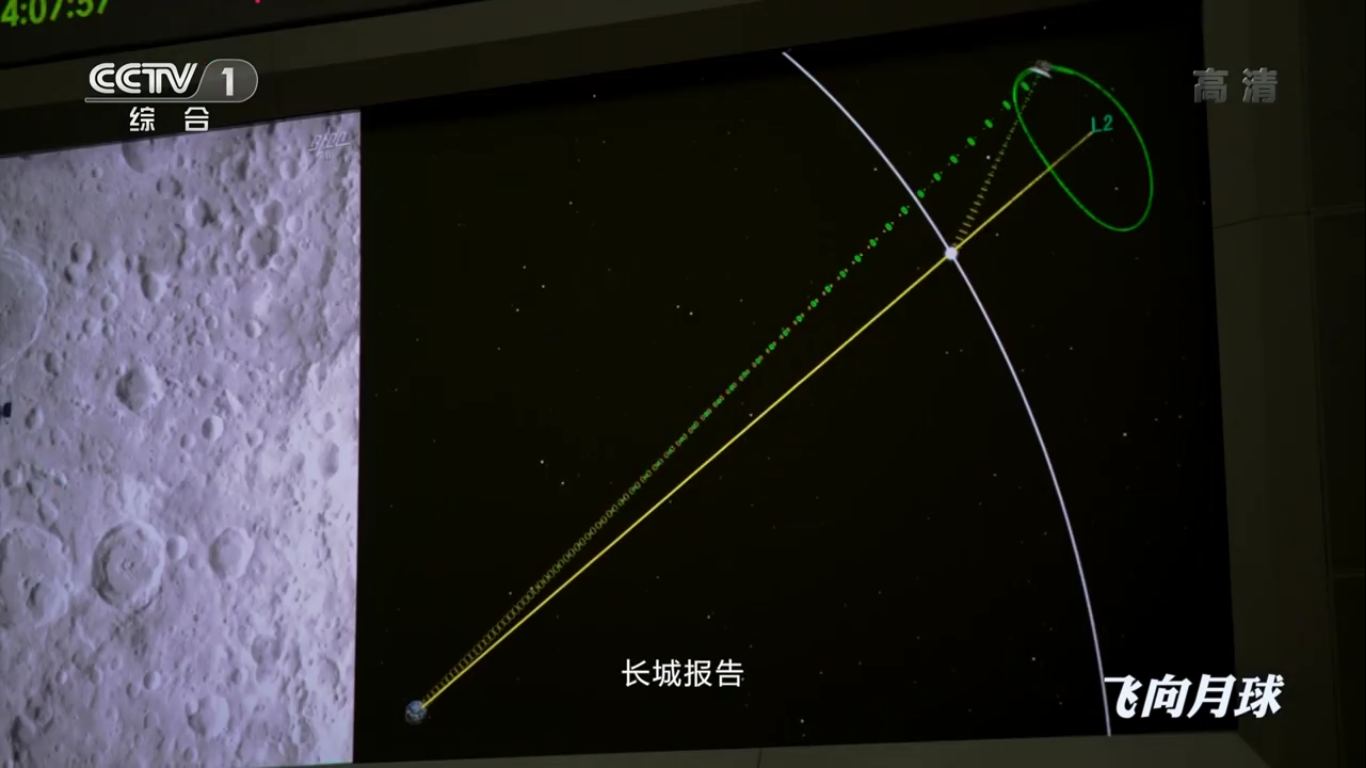
14 de junio de 2018: el relé satelital Tseyuqiao entró en órbita alrededor del punto L2 de Lagrange del sistema Tierra-Luna, a unos 65,000 km de la Luna, convirtiéndose en el primer satélite de comunicación en esta órbita del mundo.
8 de diciembre de 2018: El cohete de refuerzo Changzheng-3B con la estación Chang'e-4 fue lanzado con éxito desde el centro espacial Sichan en China.
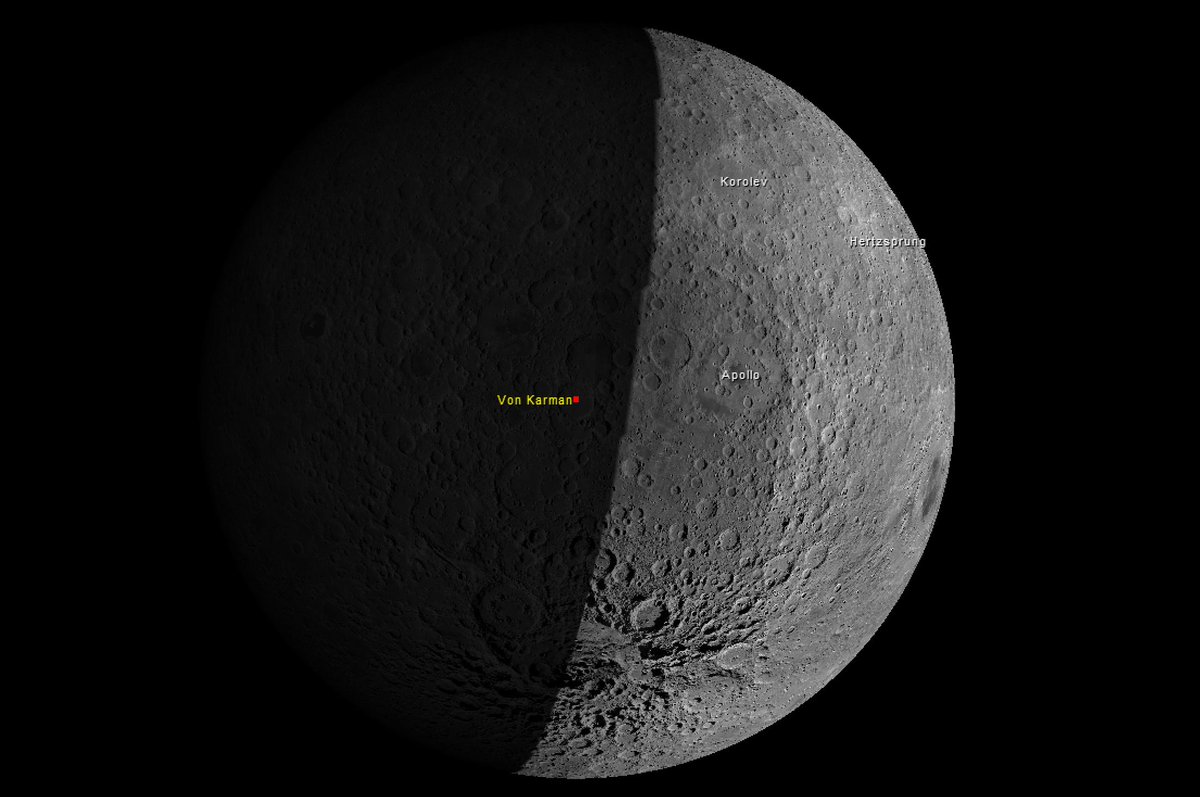
3 de enero de 2019: el módulo de aterrizaje Chang'e-4 aterriza en el cráter Karman al otro lado de la luna. El módulo de aterrizaje Chang'e-4 contiene el segundo rover lunar chino Yutu-2, un análogo modernizado del rover Yutu. El personal de la misión Chang'e-4 ahora continúa operando normalmente.
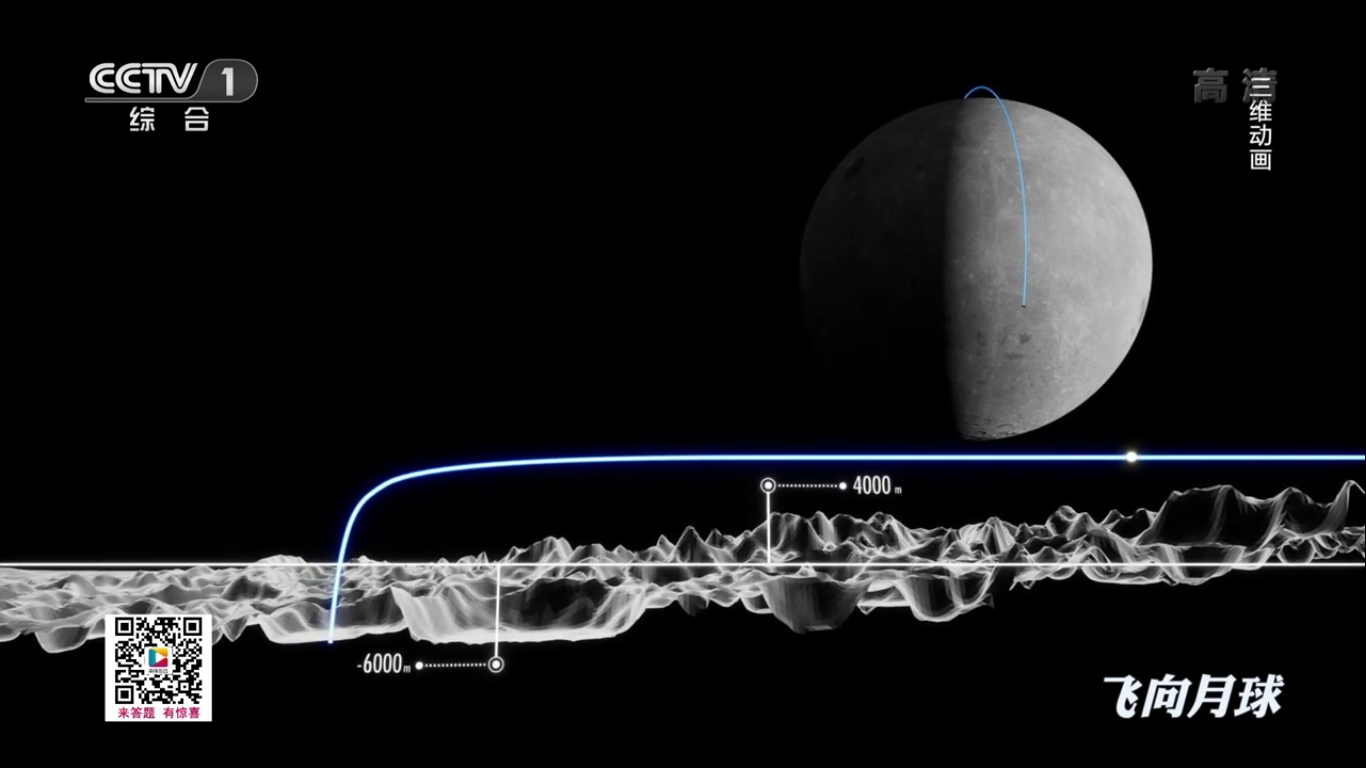
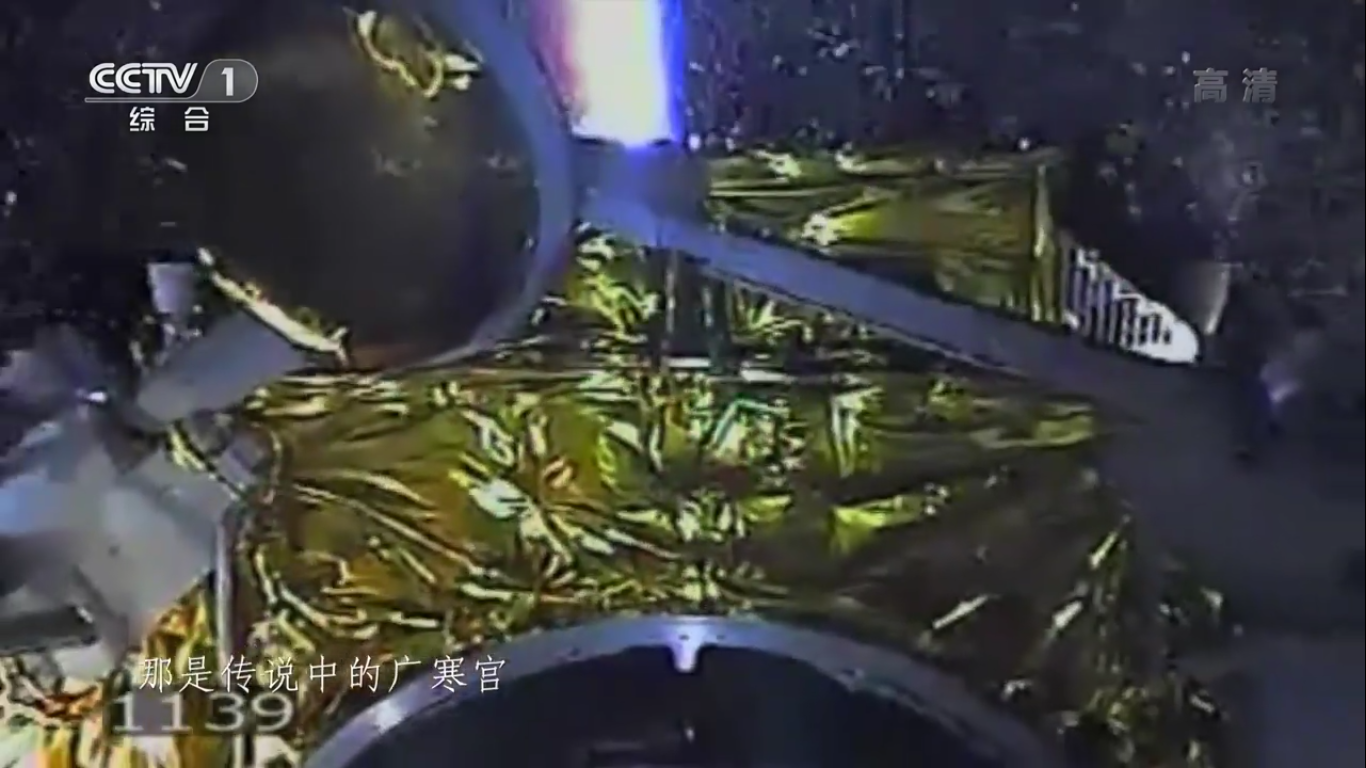
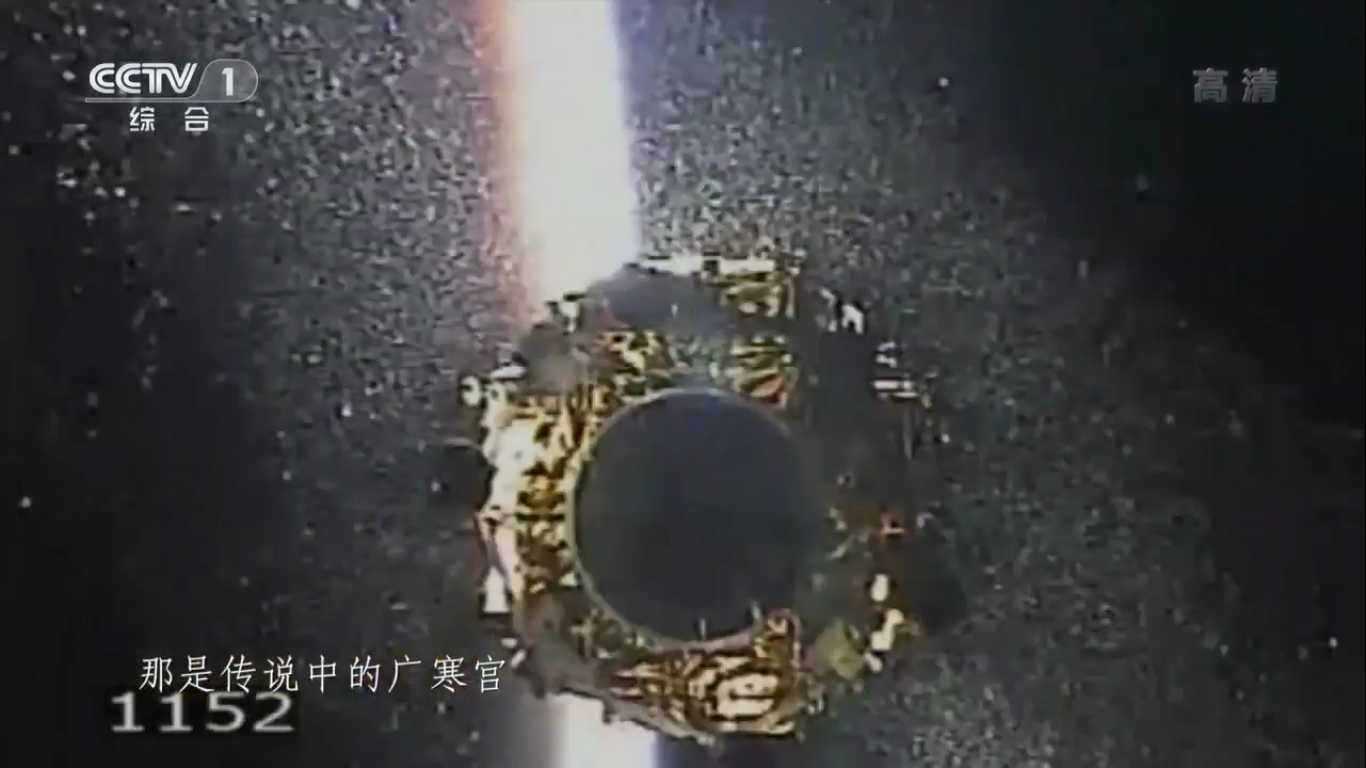
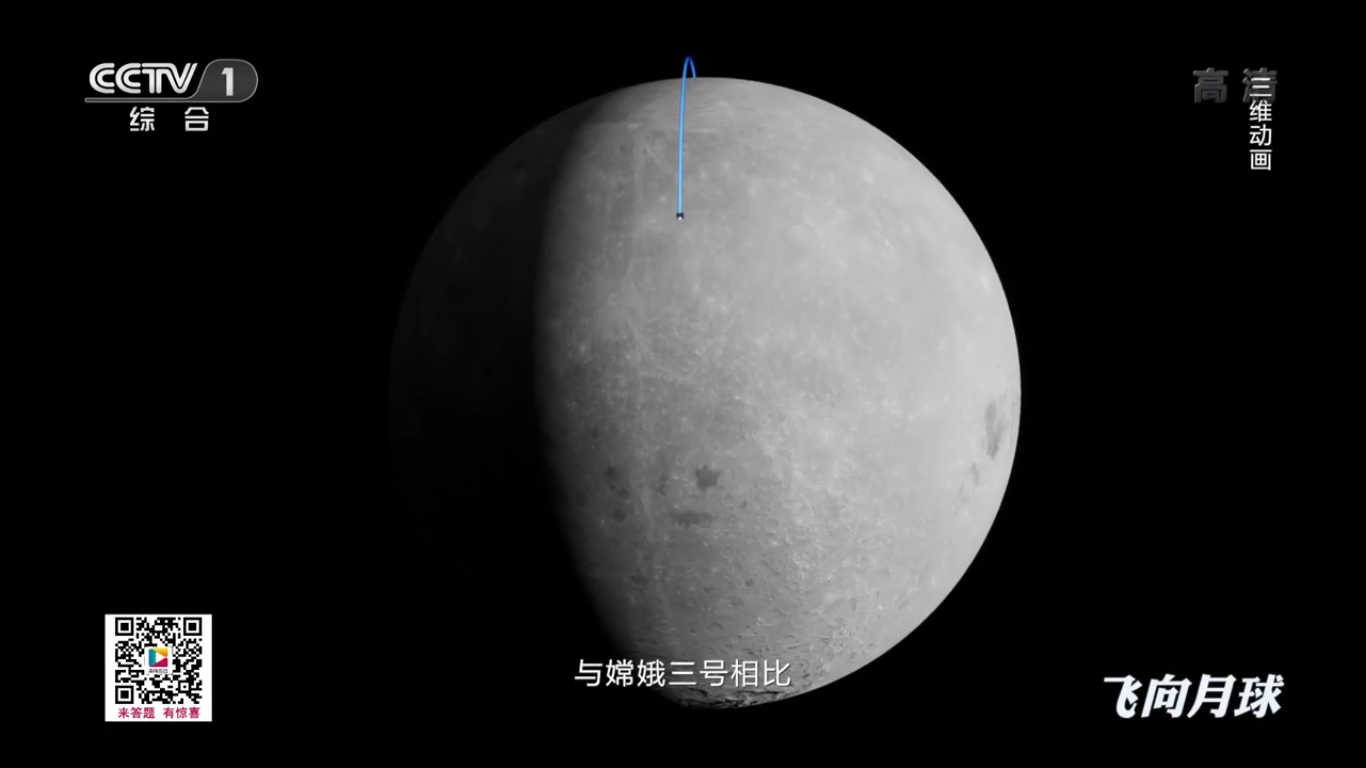
Video del procedimiento de aterrizaje en el otro lado de la luna:
Después de completar todas las etapas del exitoso procedimiento de aterrizaje e instalar canales de comunicación independientes con dispositivos Chang'e-4 (el módulo de aterrizaje y el rover), comenzó la era de exploración del otro lado de la luna.
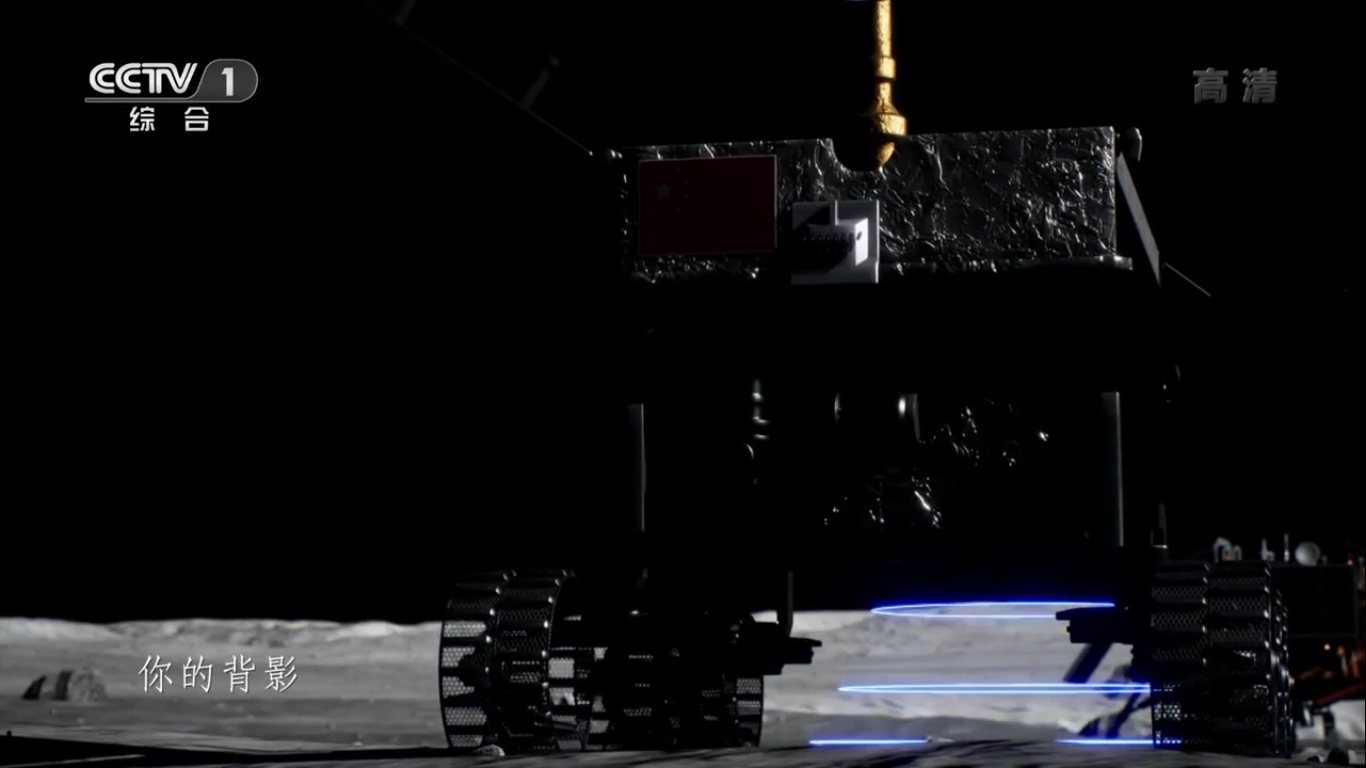
Video del descenso del rover "Yutu-2":
Video del viaje rover "Yutu-2":
El módulo de descenso Chang'e-4:- 4,4 metros entre soportes de aterrizaje opuestos, peso 1200 kg .;
- Duración del trabajo: un año terrestre.
Dispositivos instalados:
- LFS - Espectrómetro de baja frecuencia;
- LND - Neutrones y dosimetría del módulo lunar (dosímetro de neutrones);
- TCAM - Cámara de terreno (cámara de paisaje);
- LCAM - Cámara de aterrizaje (cámara de aterrizaje).
 Rover "Yutu-2":
Rover "Yutu-2":- altura 1 metro, ancho 1 metro (sin paneles solares), 1,5 metros de largo, dos paneles solares plegables, seis ruedas;
- el peso total del vehículo es de aproximadamente 140 kg (310 libras);
- capacidad de carga de aproximadamente 20 kg (44 lbs);
- puede moverse en pendientes y tiene sensores automáticos para evitar colisiones con otros objetos;
- El rover recibe electricidad por medio de dos paneles solares, lo que le permite trabajar durante un día lunar;
- velocidad máxima de 200 metros por hora (todavía no se puede alcanzar esta velocidad en la Luna, ya que los elementos en la superficie no permitirán acelerar y dañar el vehículo antes);
- El área máxima de investigación es de 3 metros cuadrados. km;
- el tiempo de funcionamiento estimado es de 3 meses (2160 horas), el rover ya ha excedido su vida útil;
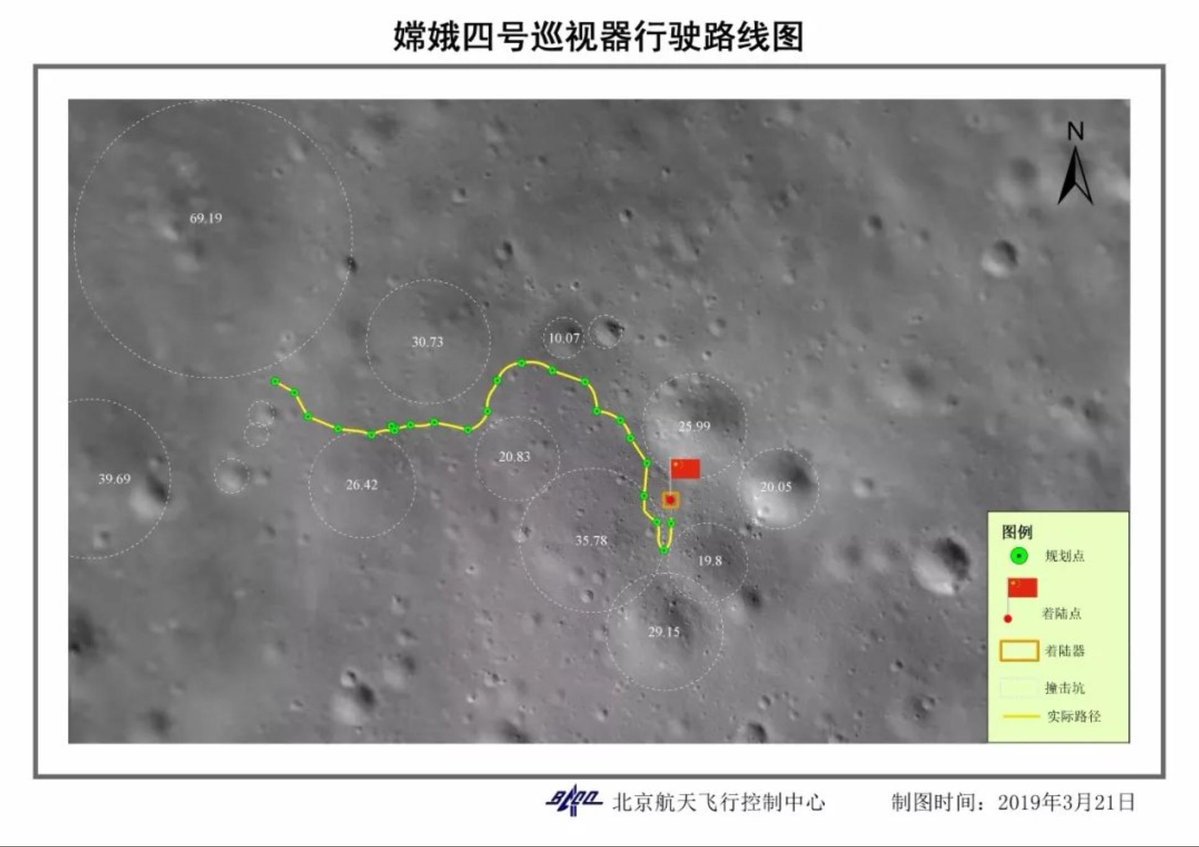
- la distancia máxima estimada es de 10 km, ahora se han pasado 178.9 metros a lo largo de la superficie lunar en cinco meses (1 lugar entre los rovers en el lado más alejado de la luna, sexto lugar entre todos los rovers lunares), aquí se da una tabla de la distancia de los rovers ;
- modo de control: automático (desvío de pequeños obstáculos), manual (principal): el operador controla desde la Tierra.
Dispositivos instalados:
- LPR - Radar penetrante lunar;
- ASAN - Analizador pequeño avanzado para neutros (pequeño analizador de partículas neutras);
- VNIS - Espectrómetro de imágenes visibles e infrarrojo cercano (espectrómetro infrarrojo);
- PCAM - Cámara panorámica (cámara panorámica doble).
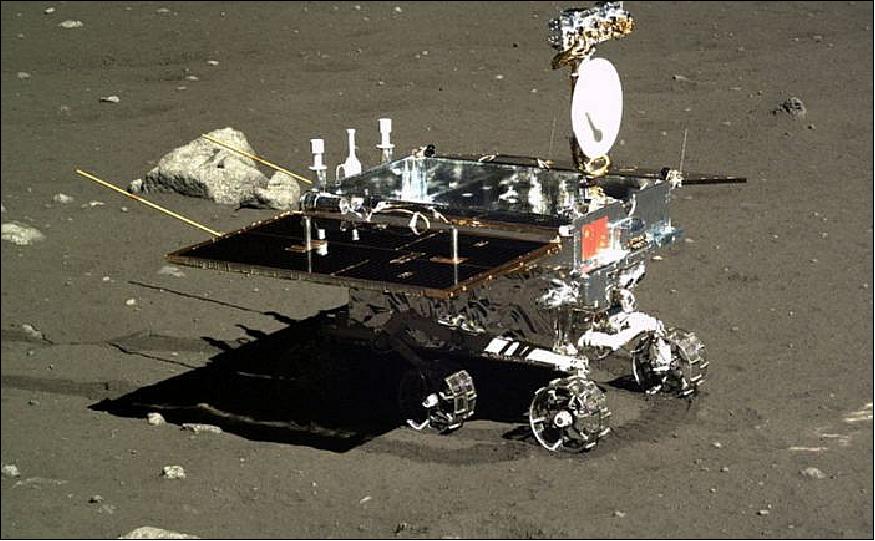
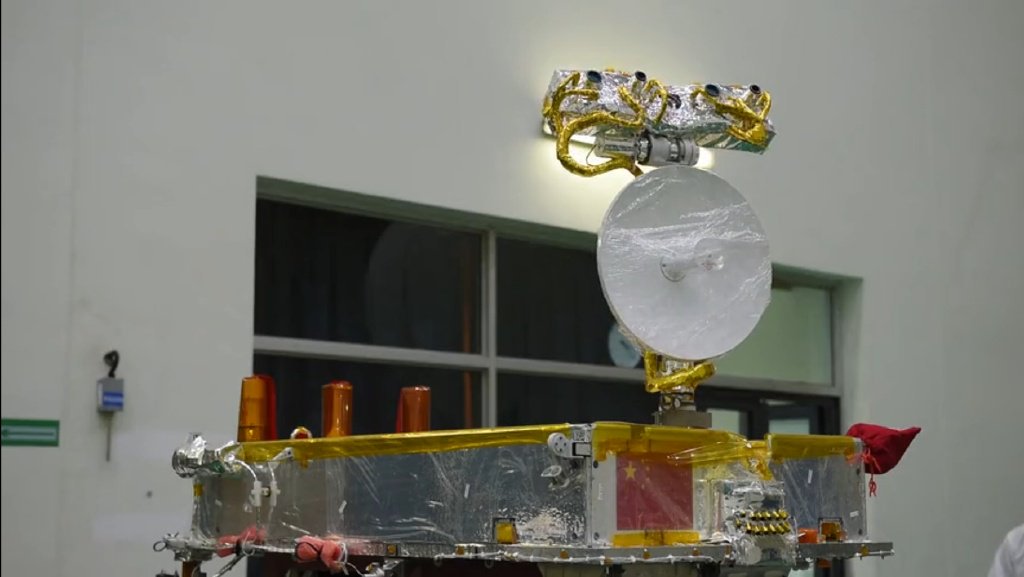
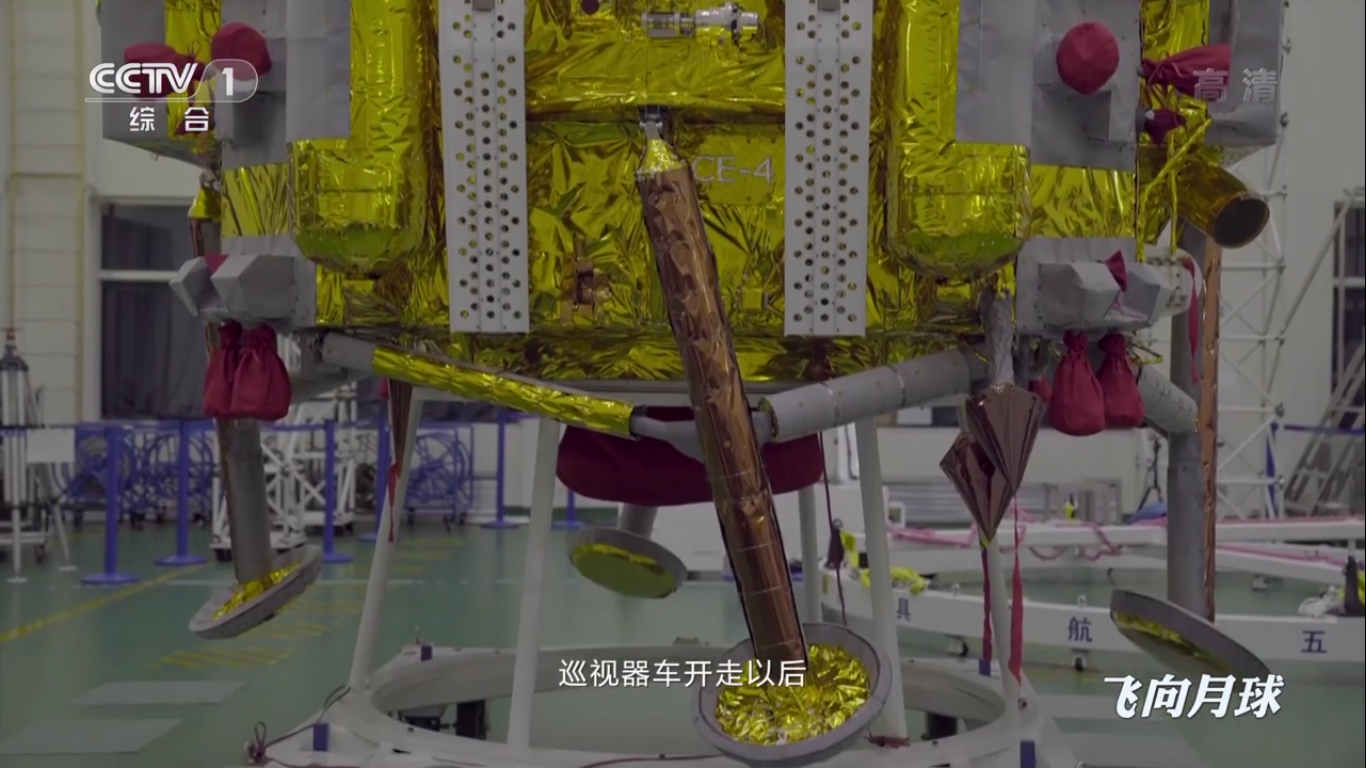
Foto rover en la Tierra:



El relé satelital Tseyuqiao (Forty Bridge), lanzado el 21 de mayo de 2018, opera en una órbita de halo alrededor del punto de Lagrange gravitacionalmente estable Tierra-Luna L2, desde el cual puede mantener una visibilidad directa con la Tierra y la parte posterior lunar en cualquier momento para el intercambio de datos entre el MCC y los módulos del proyecto Chang'e-4.
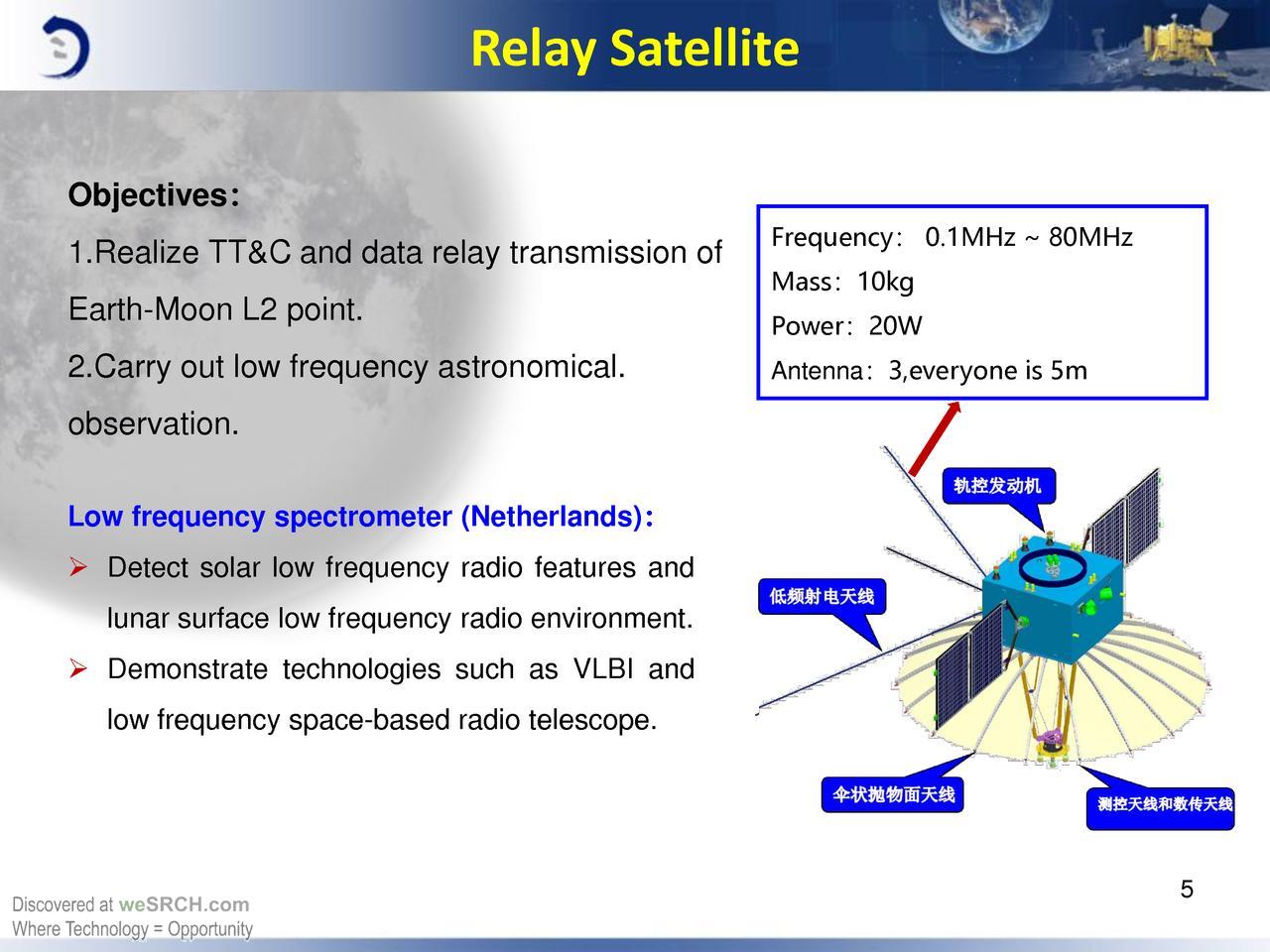
Además, se instala un espectrómetro de baja frecuencia (relé LFS) con tres antenas de cinco metros en el satélite repetidor Tseyuqiao, con el que se graban las emisiones de radio de baja frecuencia del Universo temprano, lo que hace posible estudiar su estructura.
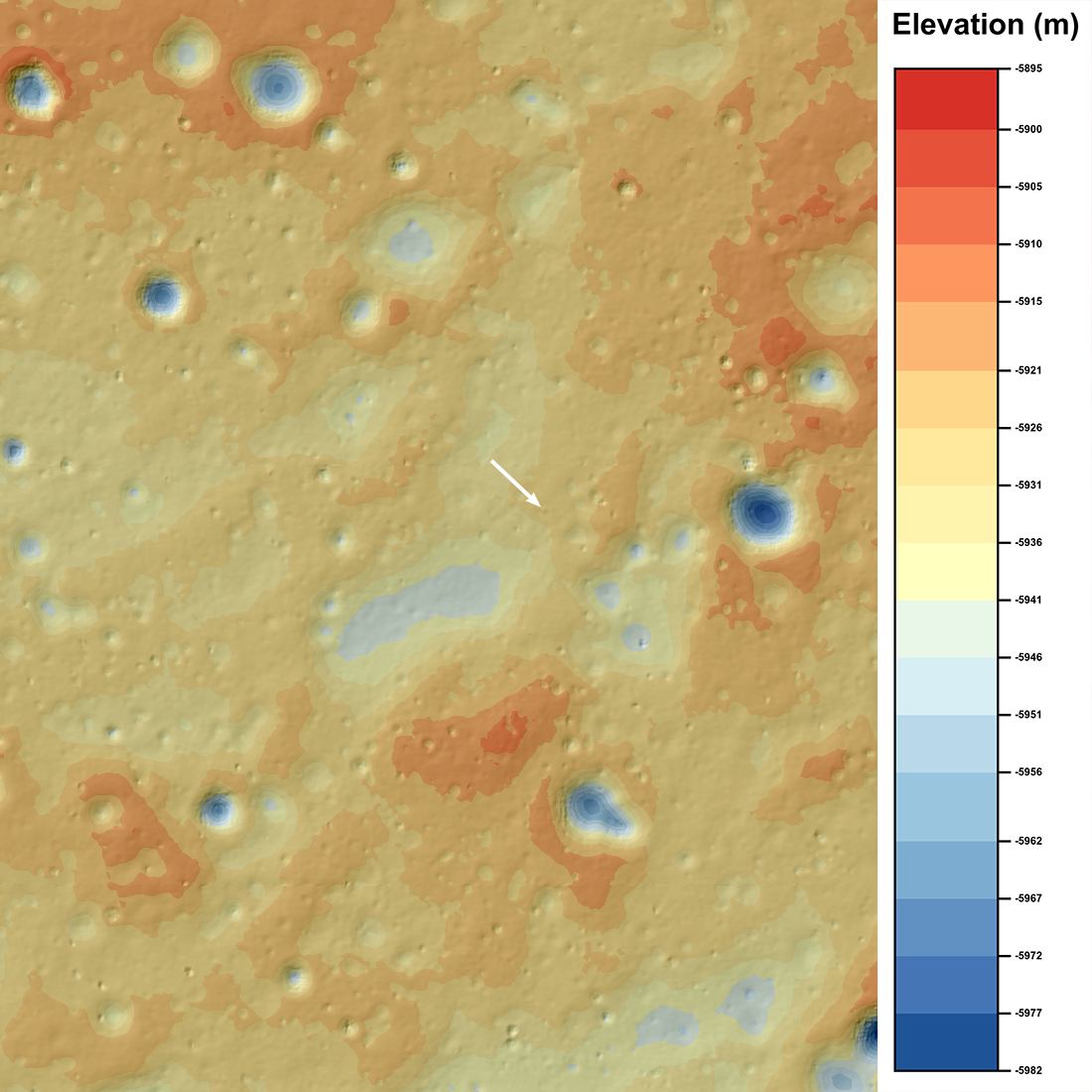
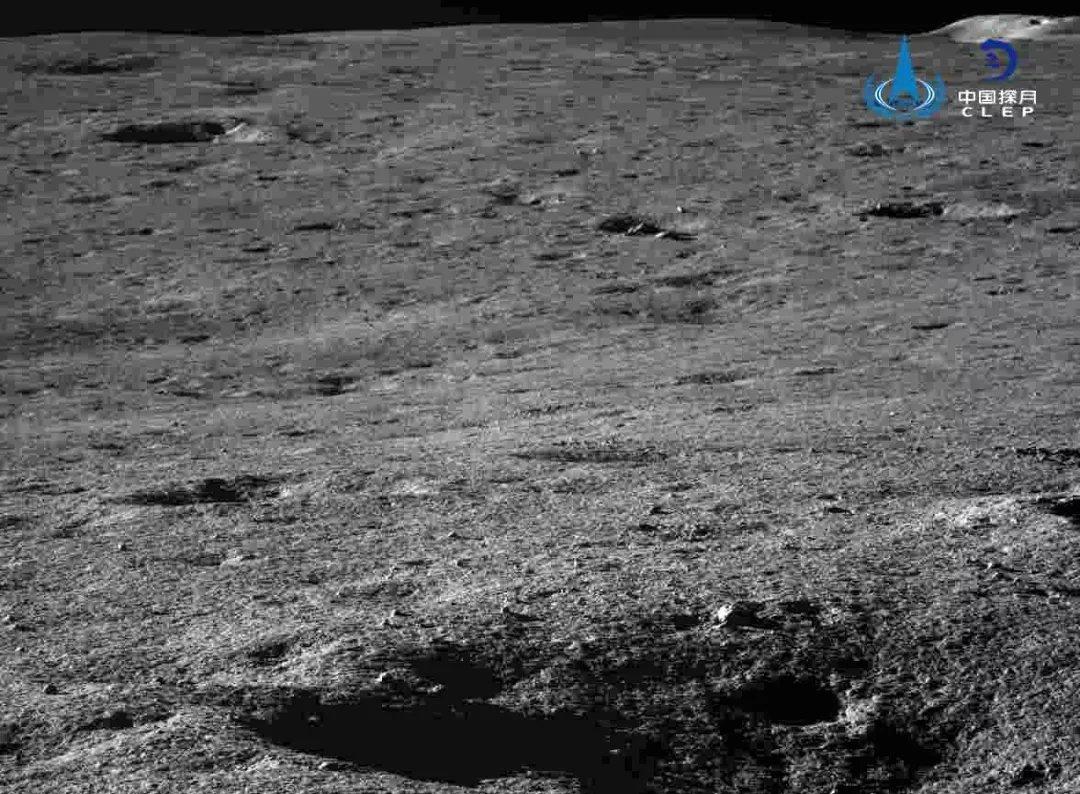
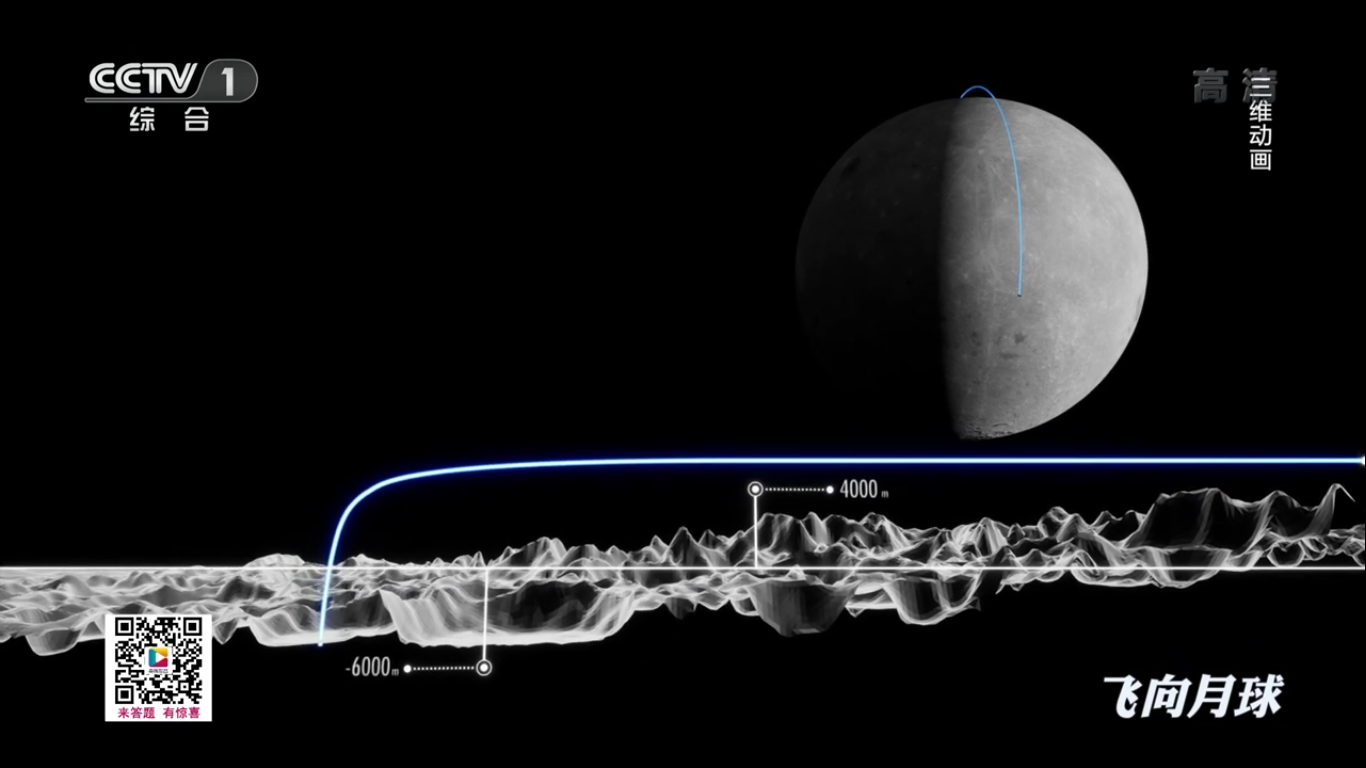
El reverso de la luna tiene un relieve más complejo que el lado visible desde la tierra. La superficie lunar en la zona de aterrizaje del módulo de aterrizaje Chang'e-4 está repleta de pliegues, numerosos guijarros y pequeños cráteres.
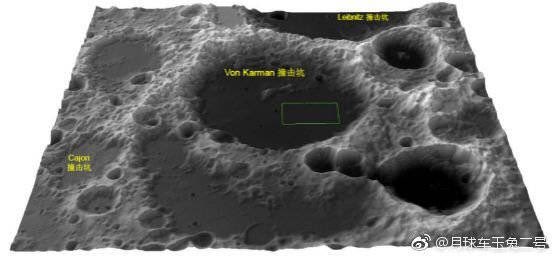
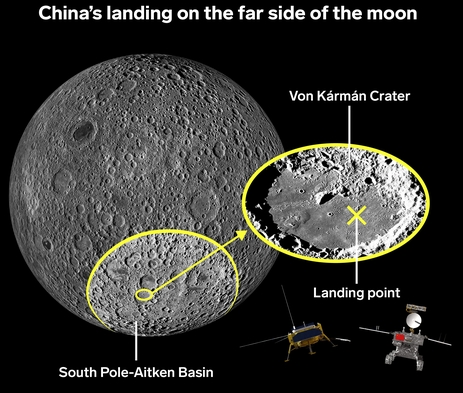
Foto topográfica de la zona de aterrizaje en el bolsillo del cráter del lado más alejado de la luna del módulo de descenso Chang'e-4 (hecho por la sonda LRO, NASA):
 Nuevas fotos de la superficie lunar de las cámaras del módulo de aterrizaje Chang'e-4 y el rover Yutu-2.
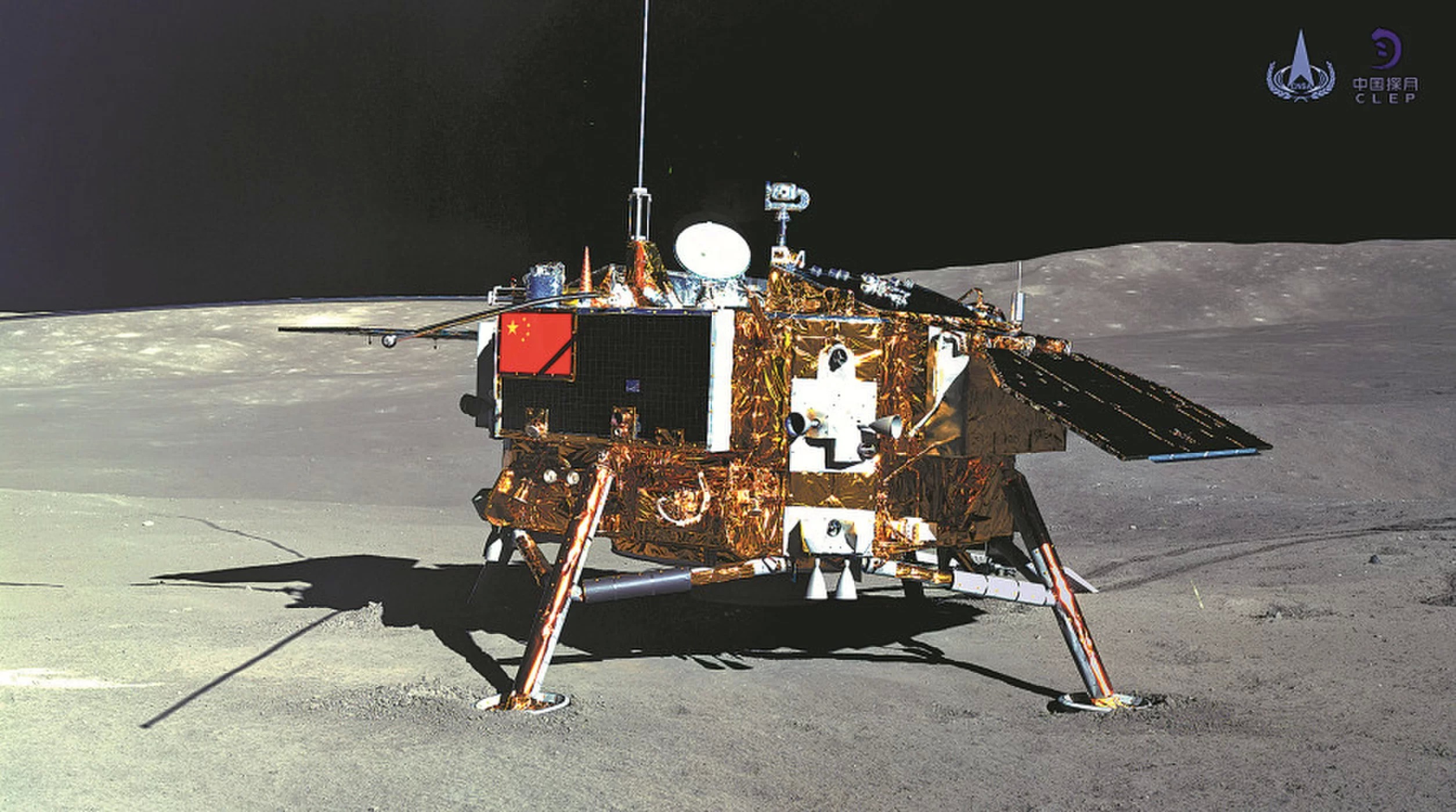
Nuevas fotos de la superficie lunar de las cámaras del módulo de aterrizaje Chang'e-4 y el rover Yutu-2.El muy solitario módulo de aterrizaje Chang'e-4:

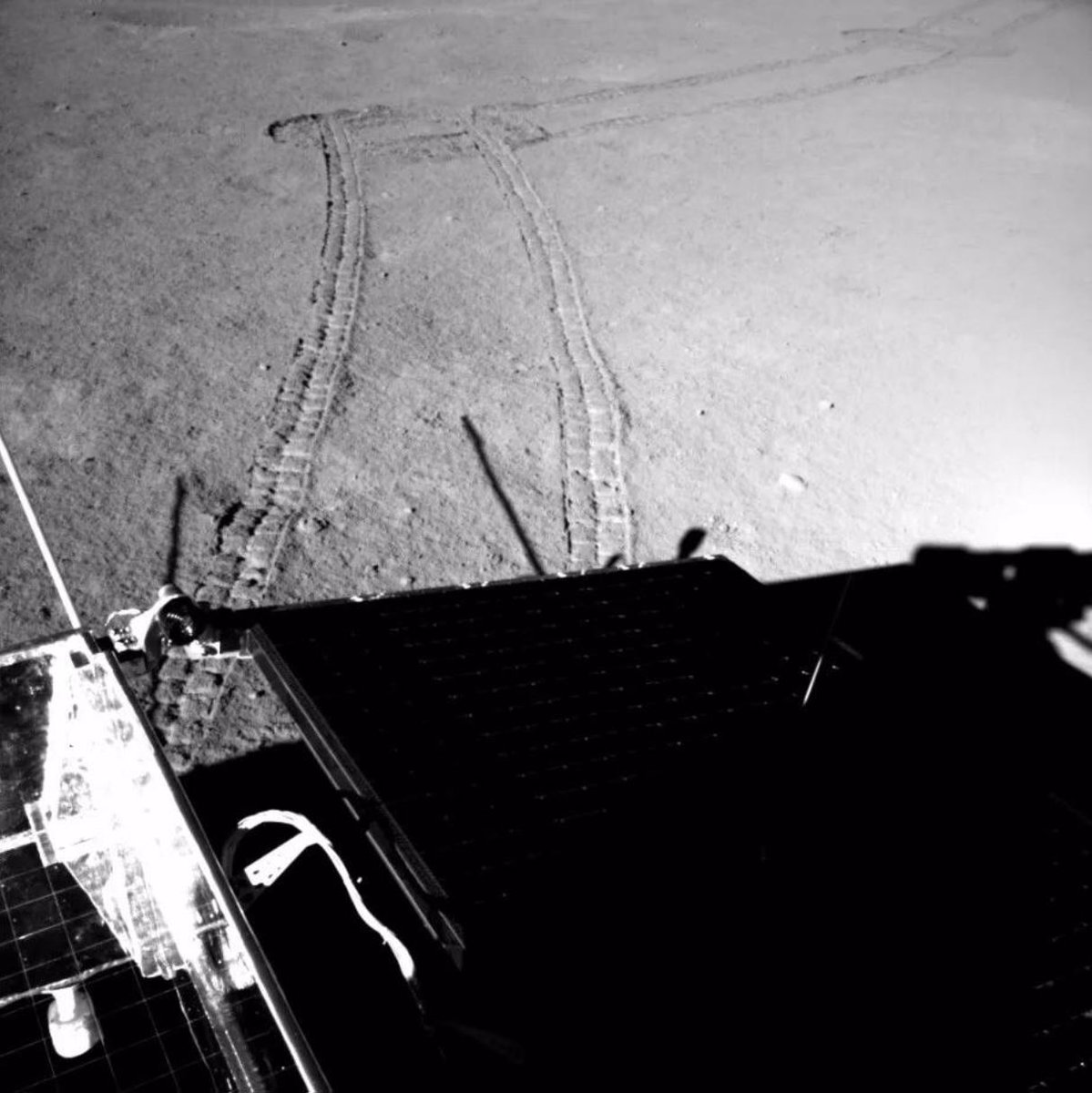
Rastros del rover Yutu-2.

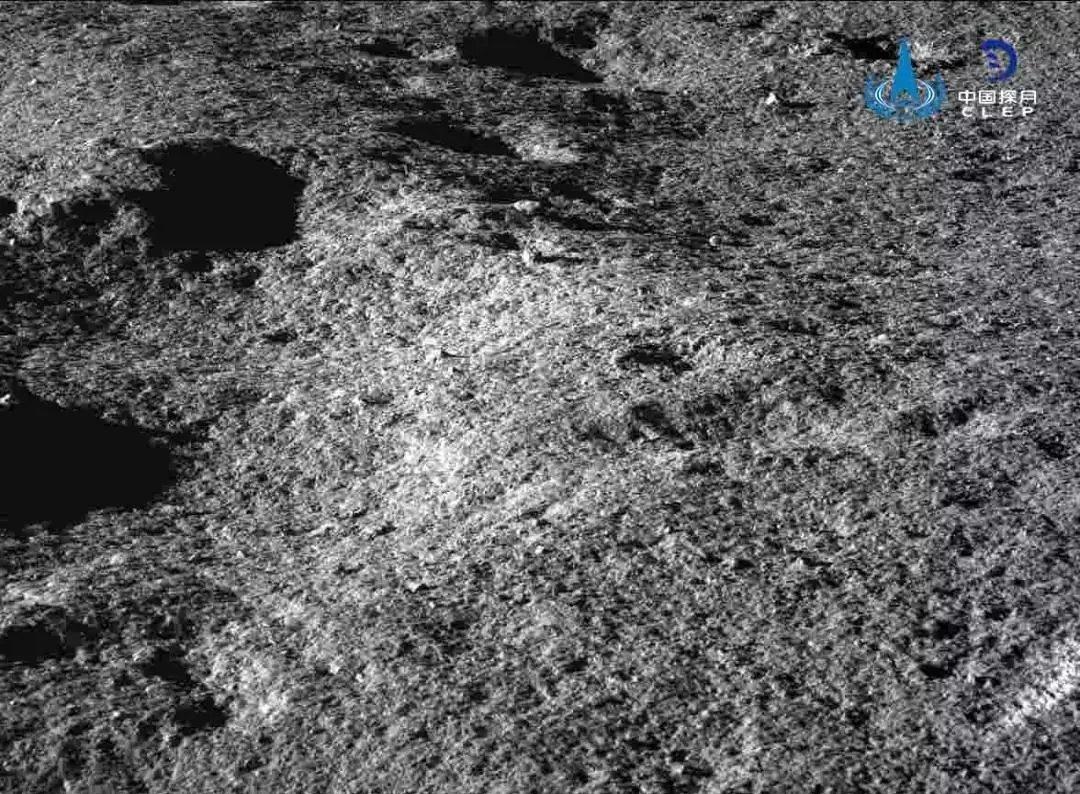
La superficie de la parte posterior de la luna:



 Anteriormente enviado a la Tierra fotografías de la superficie de la parte posterior de la luna:
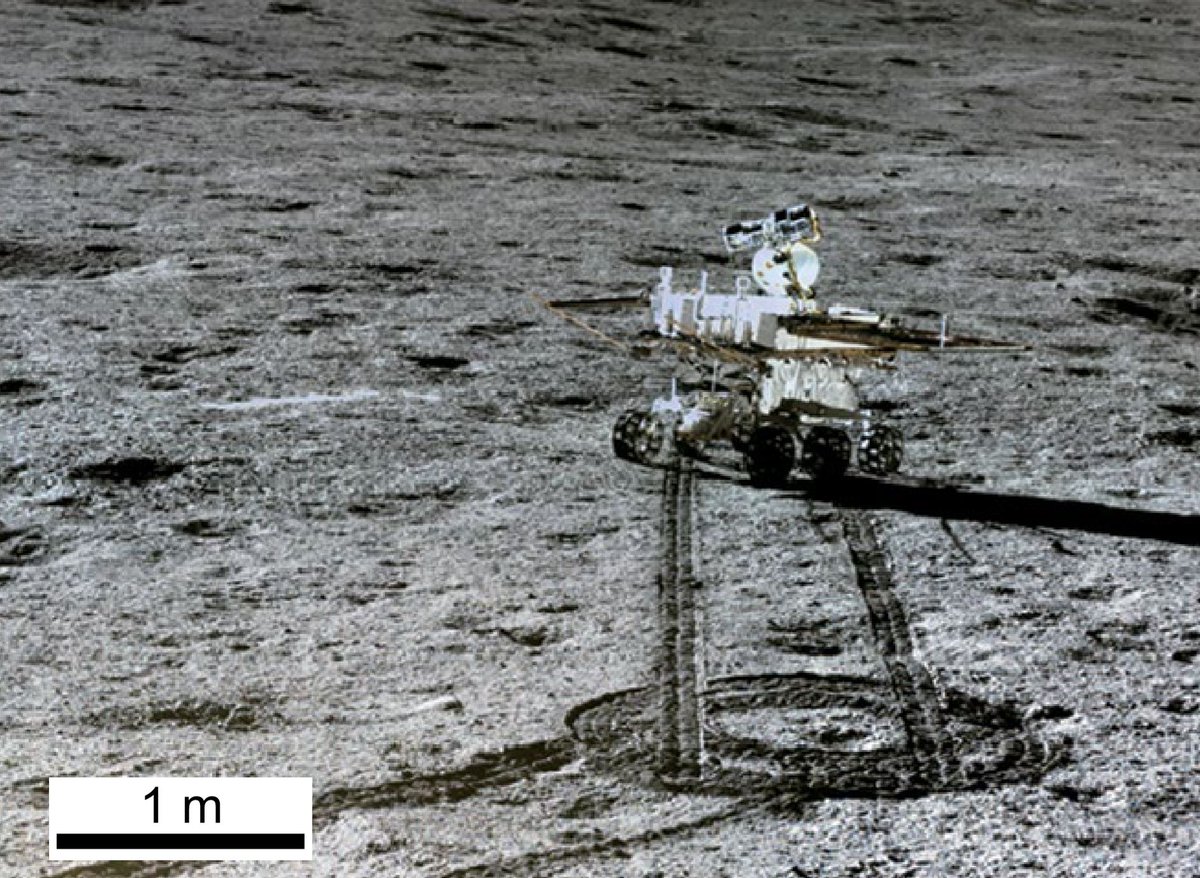
Anteriormente enviado a la Tierra fotografías de la superficie de la parte posterior de la luna:La trayectoria lunar desde las ruedas del rover Yutu-2 y la sombra desde la antena y la plataforma con una cámara panorámica:

Varios cráteres (con hermosas sombras) y montañas en el fondo:

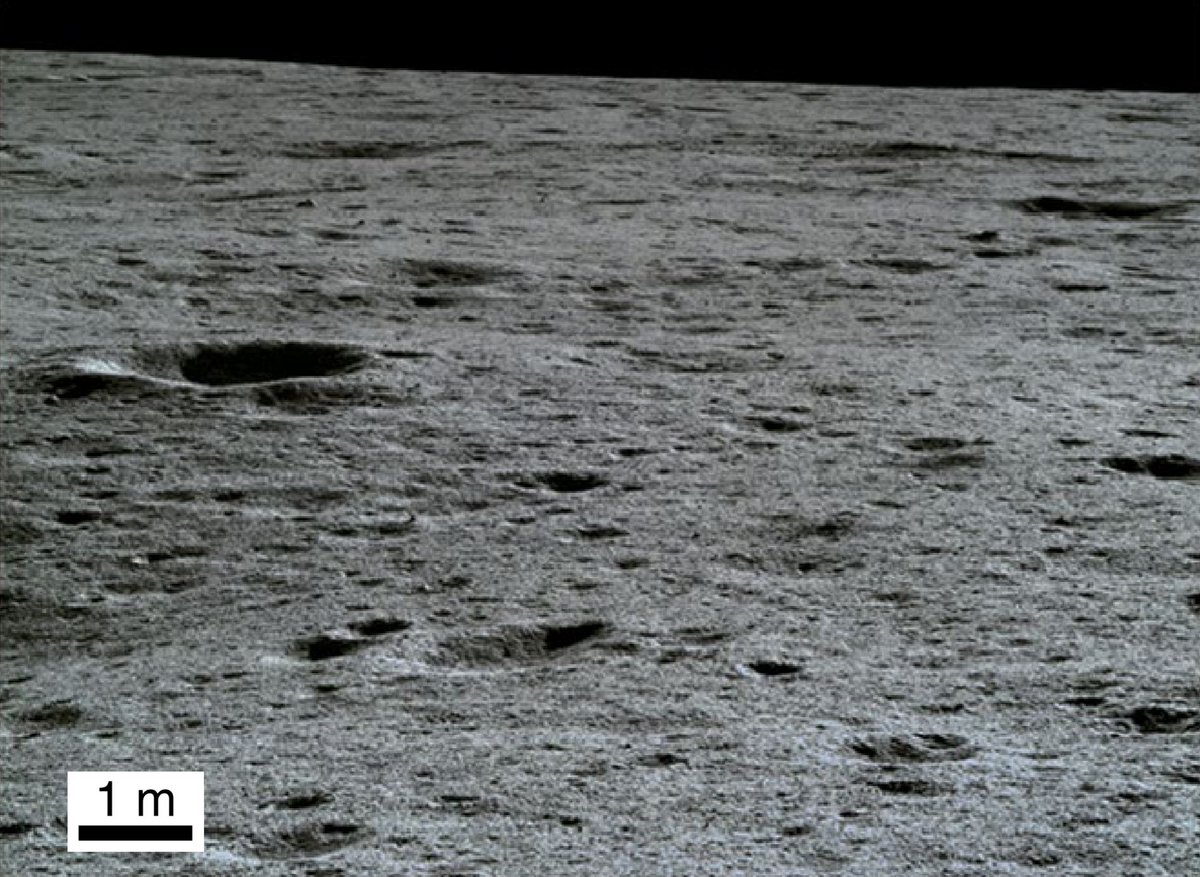
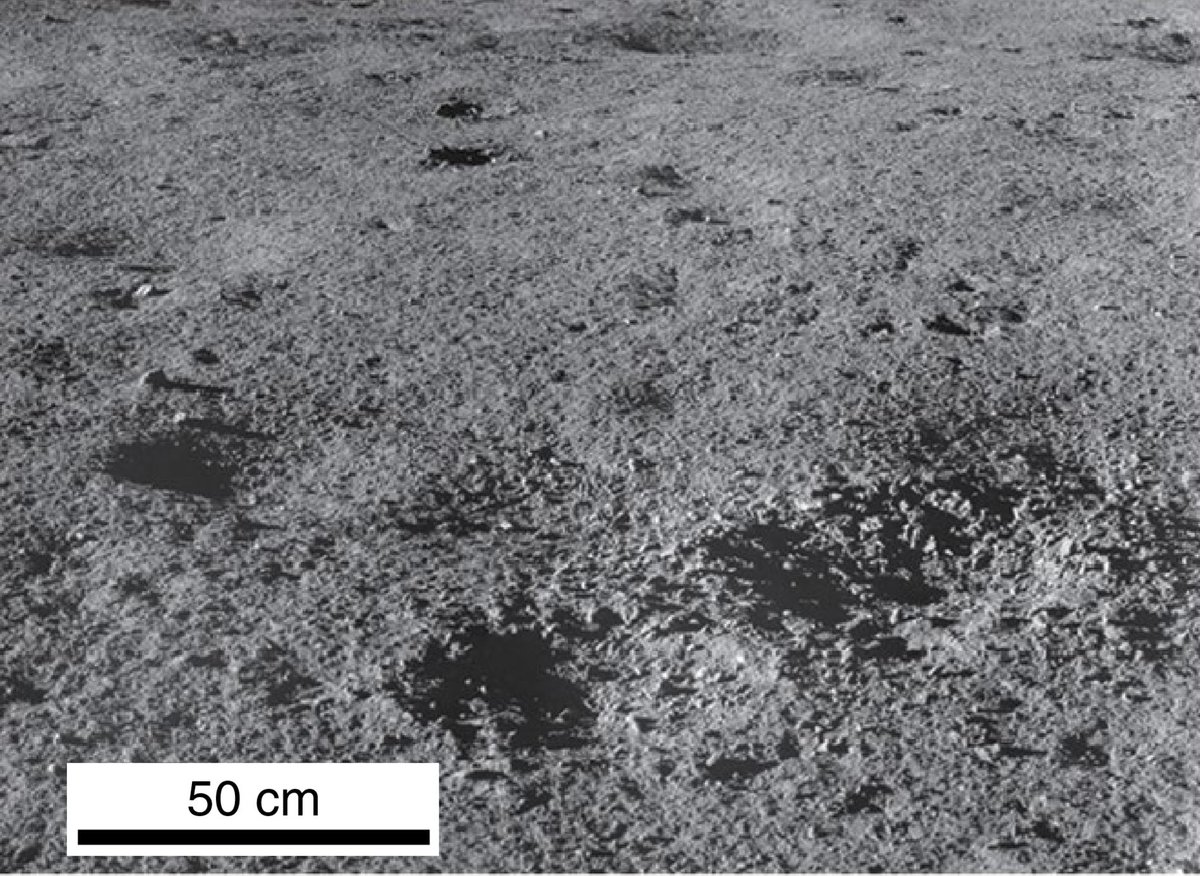
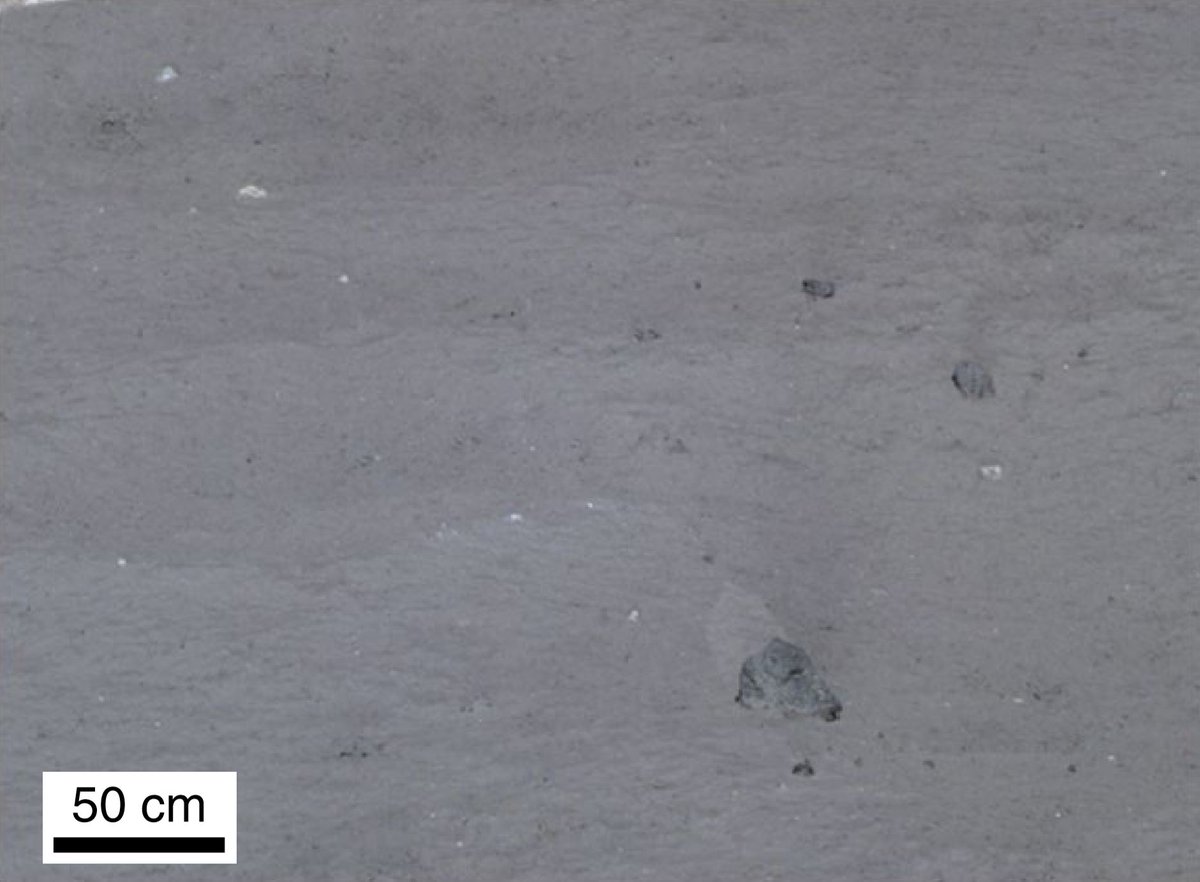
Y estas son fotos del artículo científico "Lunar farside para ser explorado por Chang'e-4" de la edición de abril de Nature Geoscience.

Pequeños cráteres cerca del lugar de aterrizaje:
Rover "Yutu-2" explora la superficie de la luna:
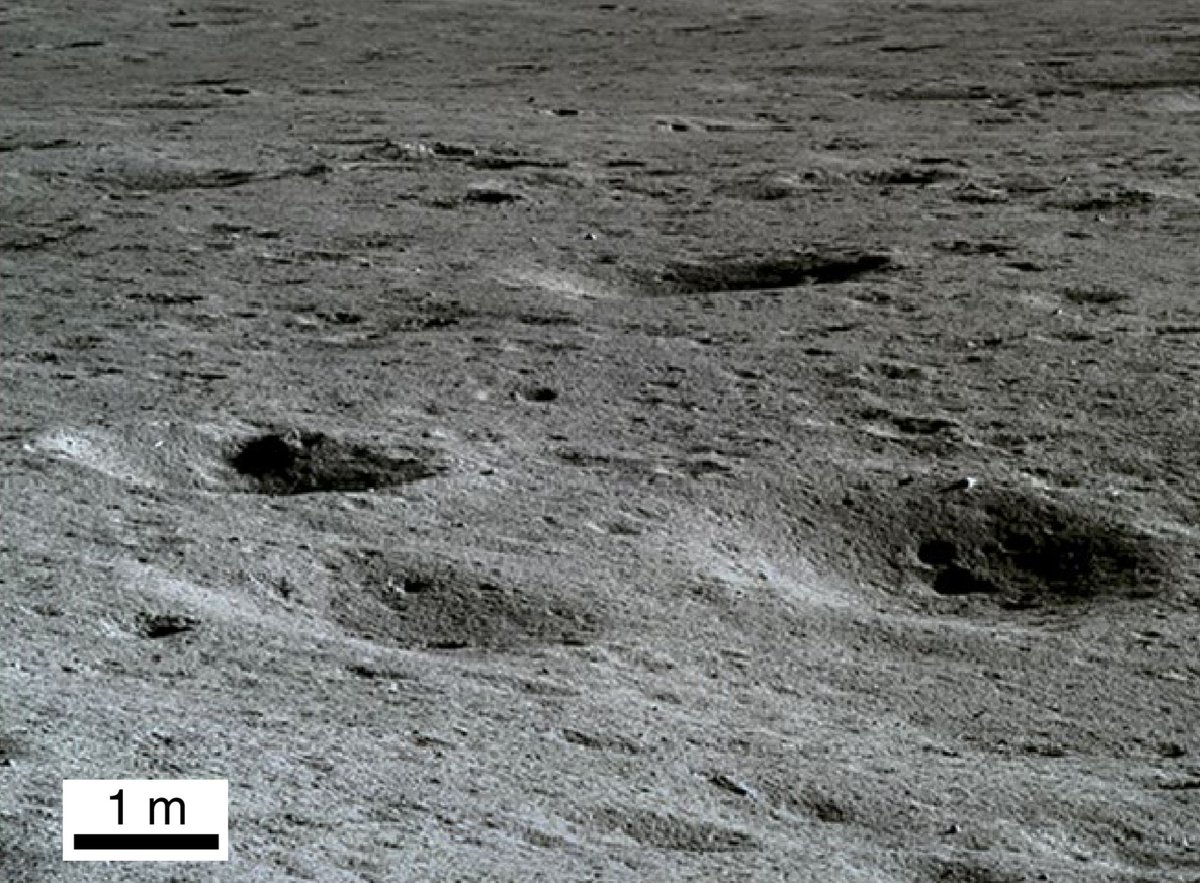
Fragmentos de piedras en pequeños cráteres (foto del rover Yutu-2):
Pequeñas piedras a lo largo del rover Yutu-2:

Piedras oscuras muy inusuales cerca del lugar de aterrizaje:
 Fotos de cámaras:
Fotos de cámaras:Cámara de aterrizaje LCAM: Cámara panorámica PCAM (móvil): Nuevos momentos en la historia del proyecto Chang'e-48 de diciembre de 2018: el vehículo de lanzamiento Changzheng-3B con carga útil (estación Chang'e-4) se lanzó con éxito desde el puerto espacial chino de Sichan.
Lanzamiento del vehículo de lanzamiento Changzheng-3B:



Final de cuenta regresiva:






Departamento de carga útil:


Posicionamiento de la carga útil ya en el espacio ultraterrestre:

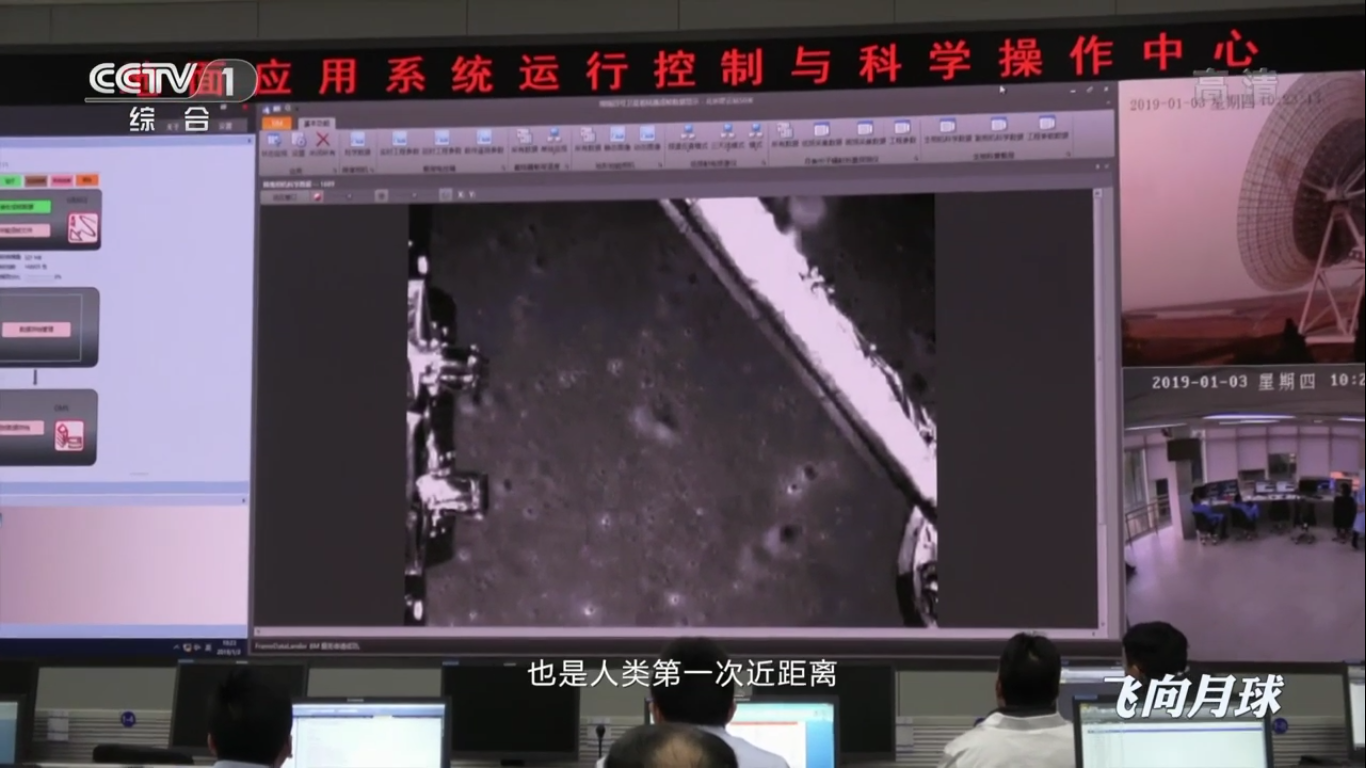
3 de enero de 2019: el módulo de aterrizaje Chang'e-4 aterriza en el cráter Karman al otro lado de la luna.

En el centro de control de vuelo de la Academia China de Tecnología Espacial:



Zhang He - Director Ejecutivo del proyecto Chang'e-4 en su publicación:

Íconos interesantes:




En el centro de comunicaciones espaciales:

Preparación para el aterrizaje:
El sitio de aterrizaje "necesita atrapar" con mucho cuidado:




Algunos operadores no tienen teclado:


Proceso de aterrizaje:

Relé de comunicación por satélite:


Hay un aterrizaje:



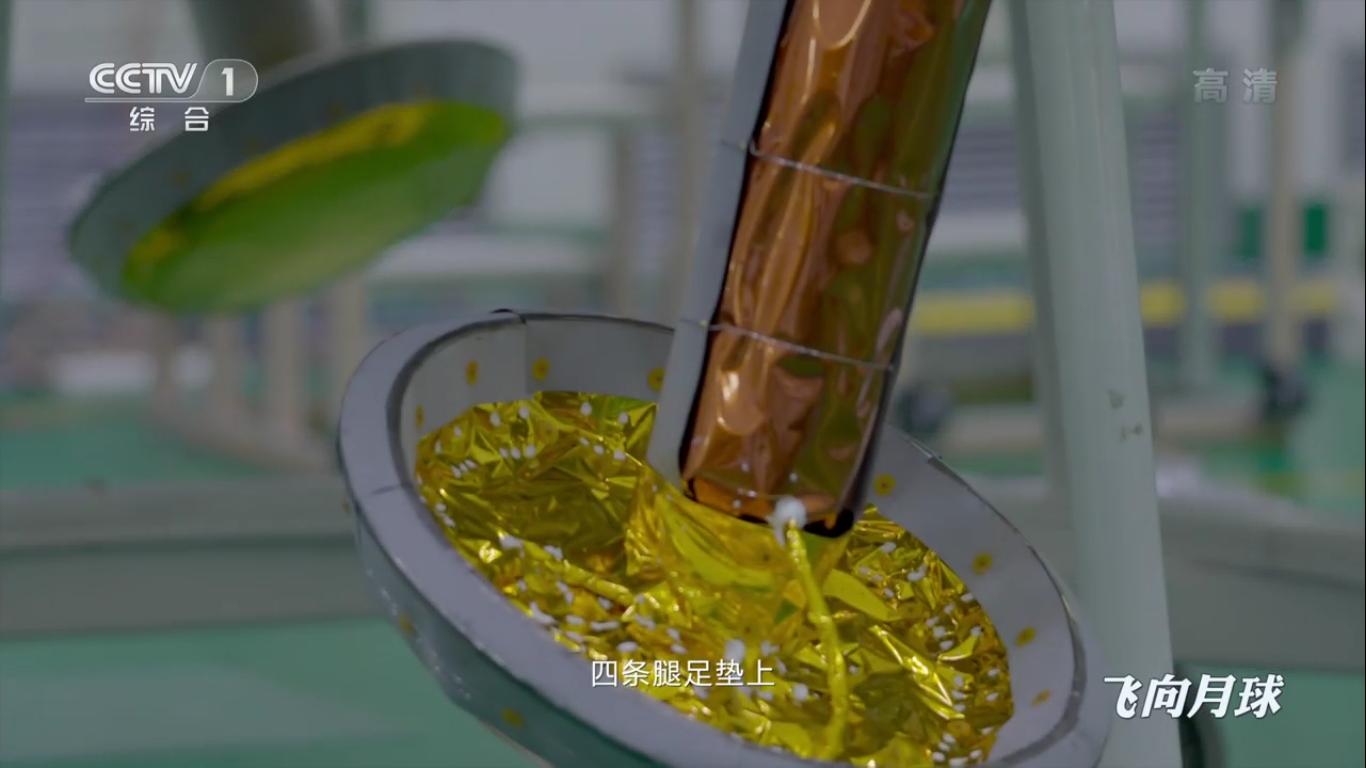
Preparándose para lanzar el rover:


Cada soporte de aterrizaje del módulo de descenso Chang'e-4 tiene un sensor táctil de superficie, y los sensores de temperatura que funcionan en una noche iluminada por la luna, registrando datos en la superficie de la luna, también están integrados en los soportes y la rampa de lanzamiento para el rover.
Según los sensores de los módulos Chang'e-4, la temperatura en la superficie lunar durante la noche cayó (mínimo) a menos 190 grados Celsius.




Recepción y procesamiento de datos en un centro de comunicaciones espaciales:

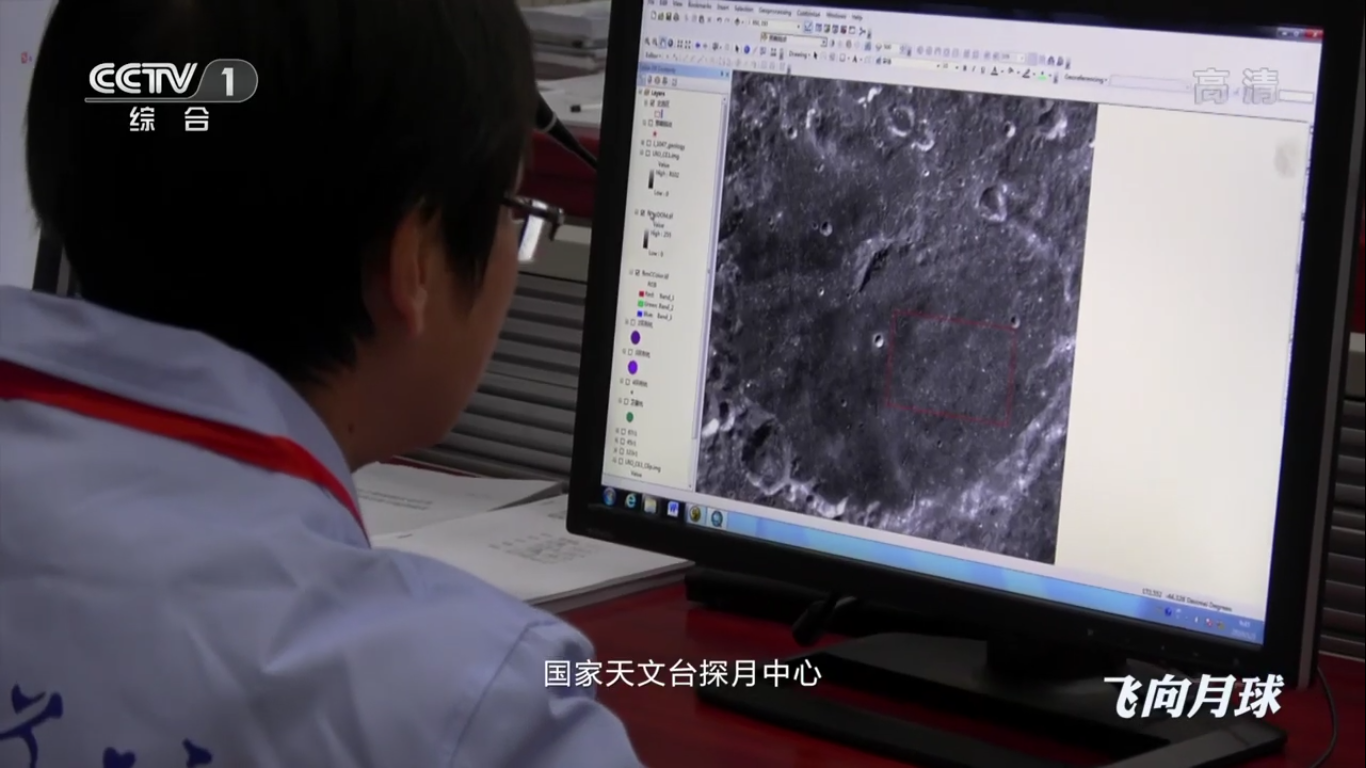
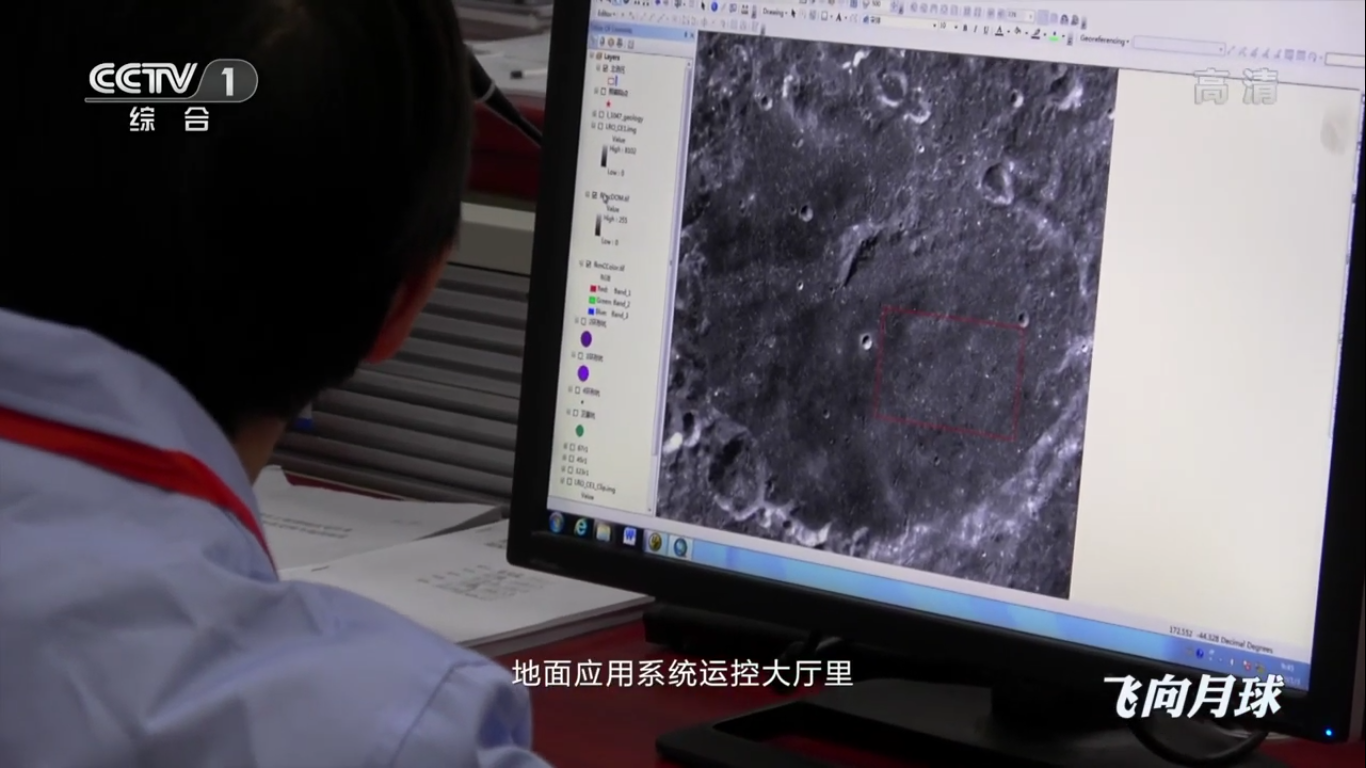
Los operadores móviles Yutu-2 confían en sus mapas de superficie virtuales:

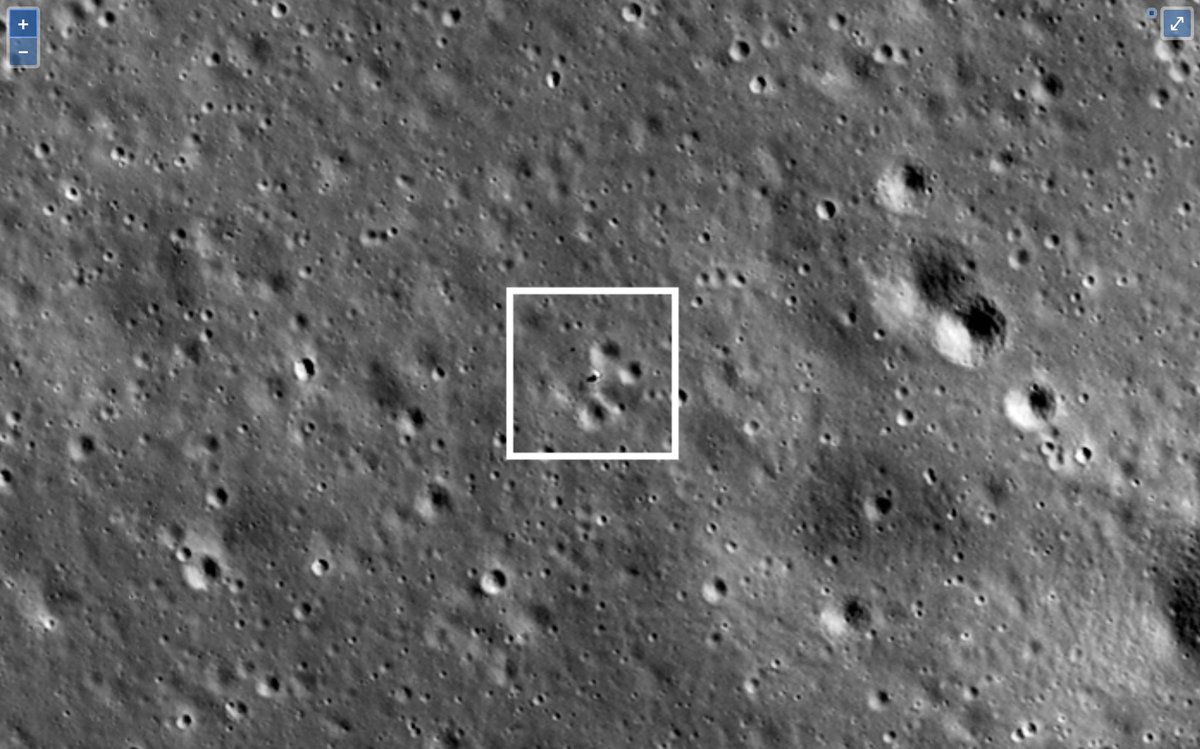
Fotos del lugar de aterrizaje de los módulos Chang'e-4 realizados
por la sonda de órbita lunar LRO (NASA) :
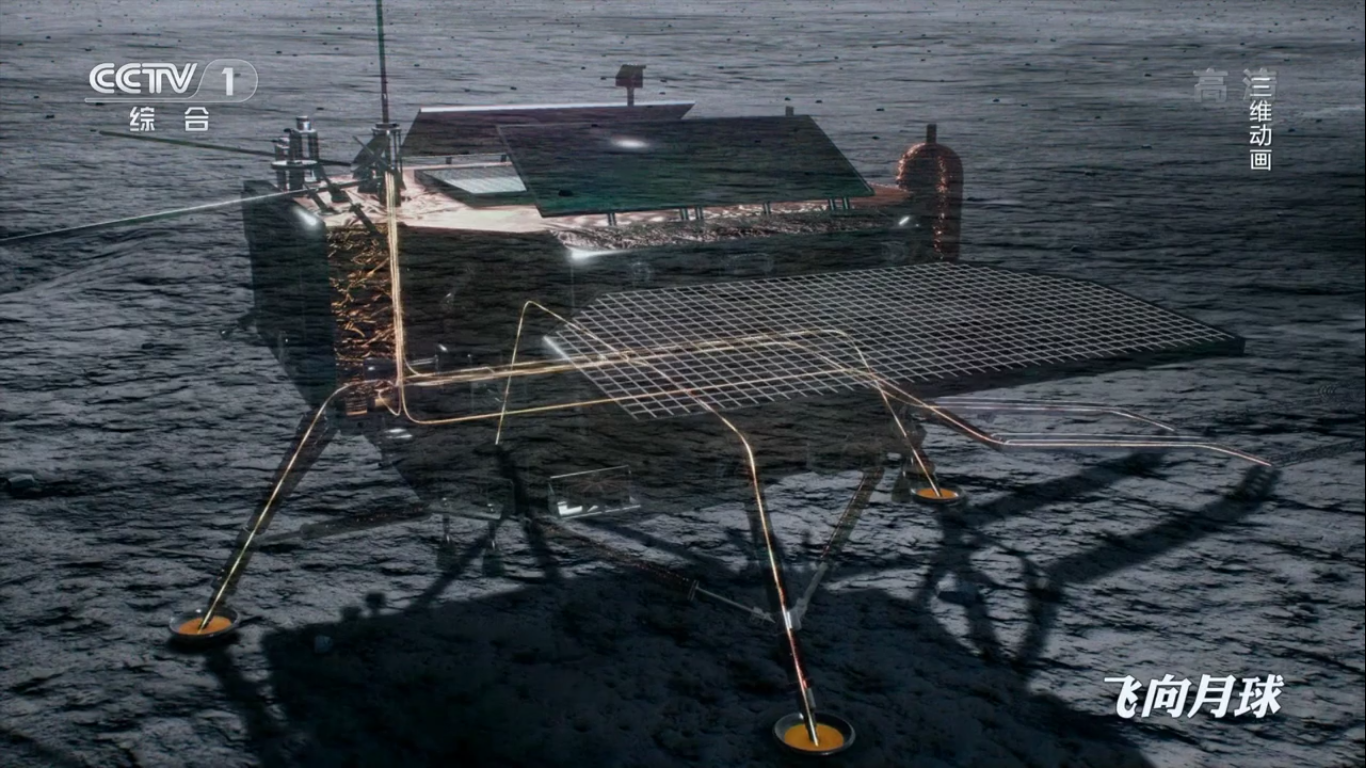
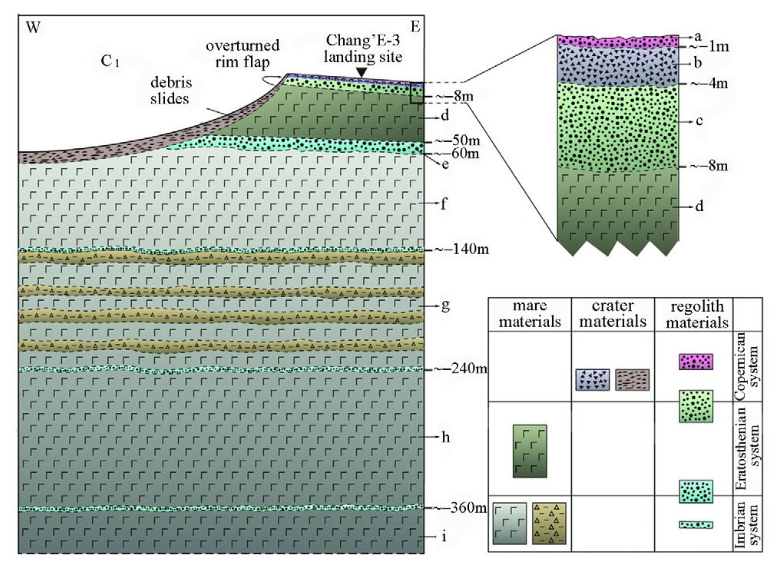
Con la ayuda de un radar especial (cuya parte externa es dos antenas-antenas y una antena plana debajo), cuyos rayos penetran en la superficie de la luna (LPR - Radar de penetración lunar), el rover "Yutu-2" crea un mapa tridimensional de la parte subterránea de la superficie lunar:
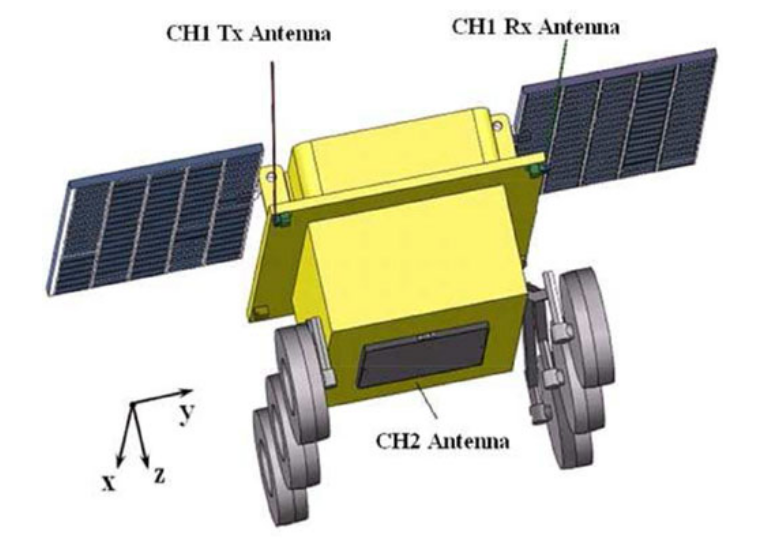
 Características del radar de penetración lunar (LPR):
Características del radar de penetración lunar (LPR):Canal 1:
- Voltaje del transmisor - 1000 V (error <5%)
- Frecuencia de pulso del transmisor - 0.5, 1, 2 kHz
- Tiempo de llegada del pulso del transmisor - <= 5 ns
- Frecuencia del receptor - 10-175 MHz
- Rango dinámico de entrada del receptor -> 90 dB
- Frecuencia central de antena - 60 MHz
- Ancho de banda de antena -> = 40 MHz
- Función de onda estacionaria - <= 3
- Profundidad máxima de detección -> = 100 m
- Resolución de profundidad - 1 m
Canal 2:
- Voltaje del transmisor -> = 400 V (error <5%)
- Frecuencia de pulso del transmisor - 5, 10, 20 kHz
- Tiempo de llegada del pulso del transmisor - <= 1 ns
- Frecuencia del receptor - 10-1000 MHz
- Rango dinámico de entrada del receptor -> 90 dB
- Frecuencia central de antena - 500 MHz
- Ancho de banda de antena -> = 450 MHz
- Función de onda estacionaria - <= 2.5
- Profundidad máxima de detección -> = 30 m
- Resolución de profundidad - <= 30 cm
El radar de penetración lunar (LPR) instalado en el rover Yutu-2 es similar en su dispositivo al radar instalado en el primer rover Yutu de la misión Chang'e-3.
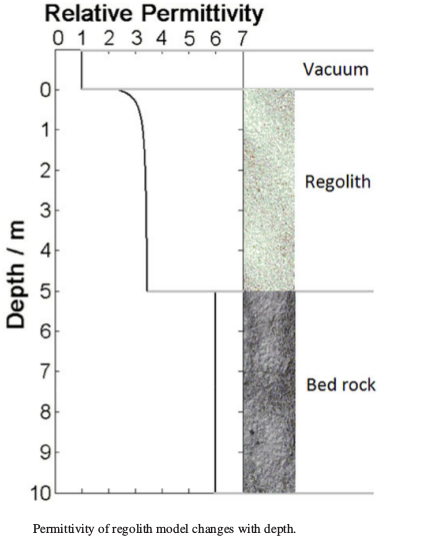
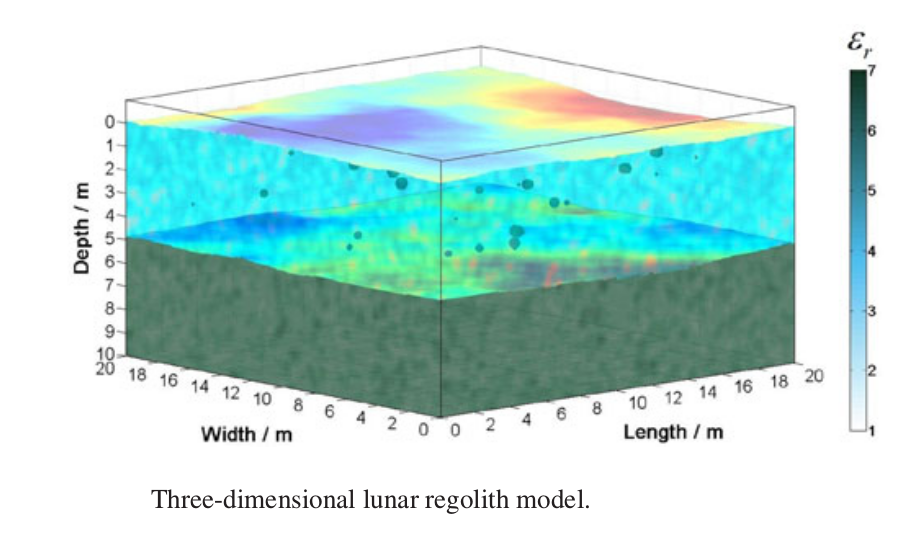
Los datos recibidos del radar LPR se analizan y resumen en gráficos en los que puede rastrear la composición geológica y las características de la superficie lunar en el área de aterrizaje:
Los científicos e ingenieros del centro de control de vuelo de la Academia China de Tecnología Espacial están tratando de maximizar el tiempo del quinto día lunar (dos semanas terrestres) para realizar investigaciones y obtener datos de los dispositivos del módulo de aterrizaje Chang'e-4 y el rover Yutu-2.
Puede leer más sobre el equipo científico del módulo de aterrizaje Chang'e-4 y el rover Yutu-2 aquí:
La misión Chang'e 4 es el tercer día lunar. Rover "Yutu-2" en busca de ... piedrasMisión Chang'e-4: equipo científico en el módulo de aterrizaje y el satélite repetidorPor cierto, el 24 de abril de 2019 (el día de la cosmonáutica china), se llevó a cabo un concurso de arte para niños organizado por la Sociedad Aeroespacial China dedicado a la conquista del espacio y la luna.
El trabajo de los niños es genial.
Guo Zhicheng - Explorando el universo en el futuro
Han Jiaxin - Fuimos al espacio
Dan Xianue - Un jardín más allá del universo
Tien Xian - Estación espacial del futuro

Zheng Yufeng - Coloreando el espacio juntos

Fang Yongxin - Estación de conversión de energía

Li Mengyin - El Sistema Solar Global

Xu Zhiyun - Investigadores

Yang Haowan - Base espacial

Yang Jinru - Ciudad del Vacío

Zhuo Xiyuan - Una nave espacial flotante

Zhou Inyo- Mora No.1451

Me gustaron especialmente estos trabajos:
Wei Wei - Mi corazón está lleno de estrellas

Dai Chiayi - Soñando con el espacio

Liu Ruiyang - Mi música en el espacio
