Hola Habr En este artículo hablaré sobre un simple robot de rastreo controlado hecho de una vieja unidad de CD. Quiero transmitir solo una idea, no un diseño específico, para que todos puedan hacer algo similar a los detalles disponibles si lo desean. El artículo tiene muchas imágenes claras y tres gifs por un total de 25 MB.
Si a alguien le gusta ver más videos,
aquí hay un video sobre este robot .
Muchos entusiastas de la electrónica piensan en lo que se puede hacer desde unidades de CD obsoletas en nuestro tiempo. La aplicación más común es un grabador láser del cabezal láser de una grabadora de DVD y una tabla de coordenadas de dos movimientos desde este cabezal. Las puertas automáticas generalmente están hechas de una mesa deslizante para un disco (por ejemplo, para gatos o hámsters). Hice dos juguetes con una mesa extraíble: un "auto inútil" y un robot que se arrastraba. No hablaré de un automóvil inútil, porque es muy simple. A quién le importa, puedes ver un
video sobre ella .
Sin embargo, la idea de un robot que se arrastra también es muy simple. Si alguien no está familiarizado con el diseño de una unidad de CD,
puede leerlo en Wikipedia .
Comenzaré con una descripción teórica. La siguiente figura muestra una unidad de CD que se arrastra a un lado. Tiene dos ruedas que giran libremente en la parte posterior, llamadas "ruedas de apoyo". Delante hay un "volante" con su propio motor. Debajo hay dos soportes extensibles para elevar el volante.
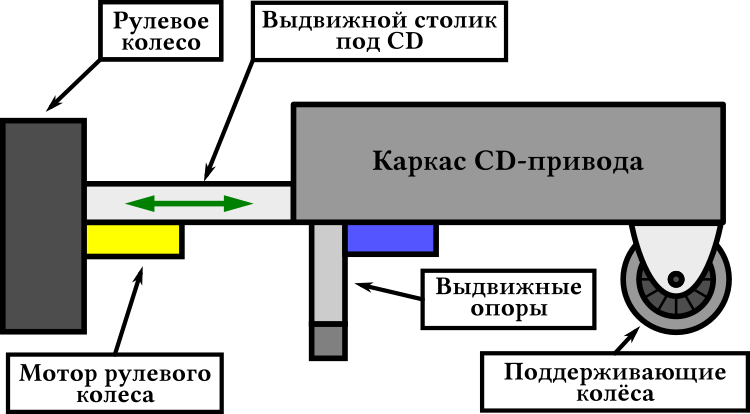
En la siguiente figura, la vista frontal, sin embargo, resultó ser poco entendida.

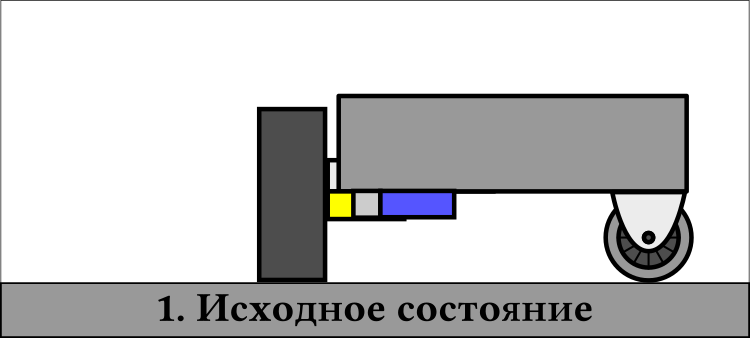
La forma en que este sistema se arrastra también se muestra en las figuras. Entonces, hay un estado inicial cuando la tabla deslizante del CD y los soportes se insertan. Desde esta posición, el robot comienza a moverse hacia adelante, hacia atrás y realiza un giro.
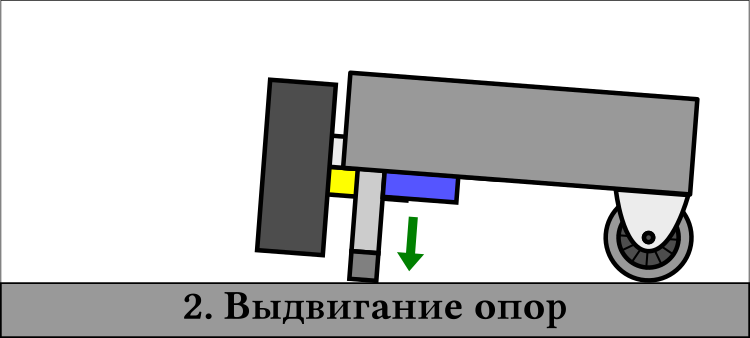
Para avanzar, los soportes se extienden primero, elevando así el volante.
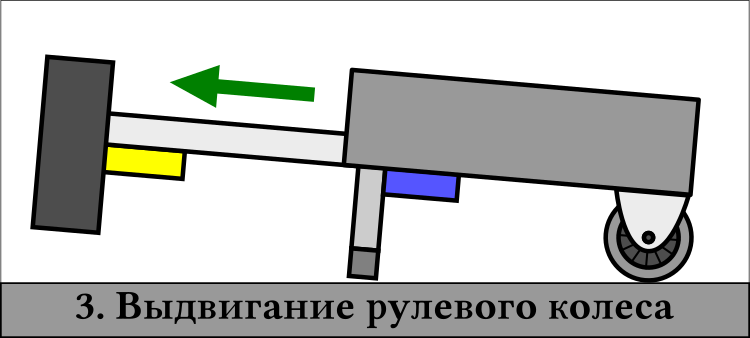
Luego, la mesa de CD se extiende junto con el volante.
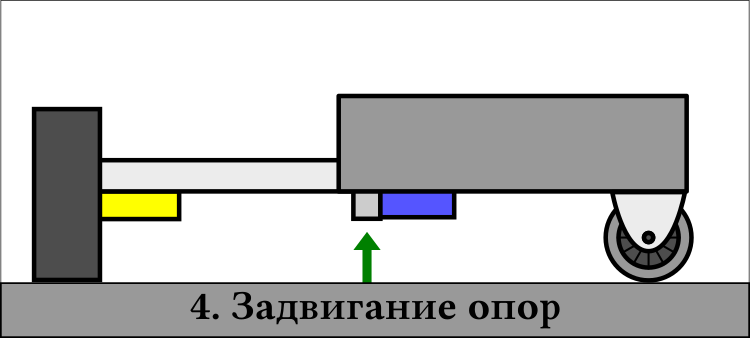
Además, los soportes se retraen y el volante baja.
Ahora queda volver a su estado original deslizando la tabla para el CD.
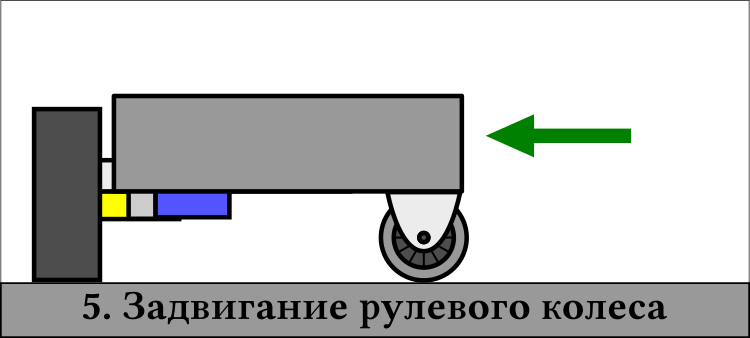
En este caso, el volante se aferra a la superficie del piso, por lo que todo el marco de la unidad de CD se empuja hacia el volante. Luego, el ciclo se repite.
Para encender el robot en el estado inicial, el motor del volante se enciende, mientras que todo el sistema comienza a girar 360 grados alrededor de un eje ubicado en algún lugar entre las ruedas de soporte.
Si comprende cómo funciona esto, no le será difícil imaginar cómo se realiza el movimiento hacia atrás.
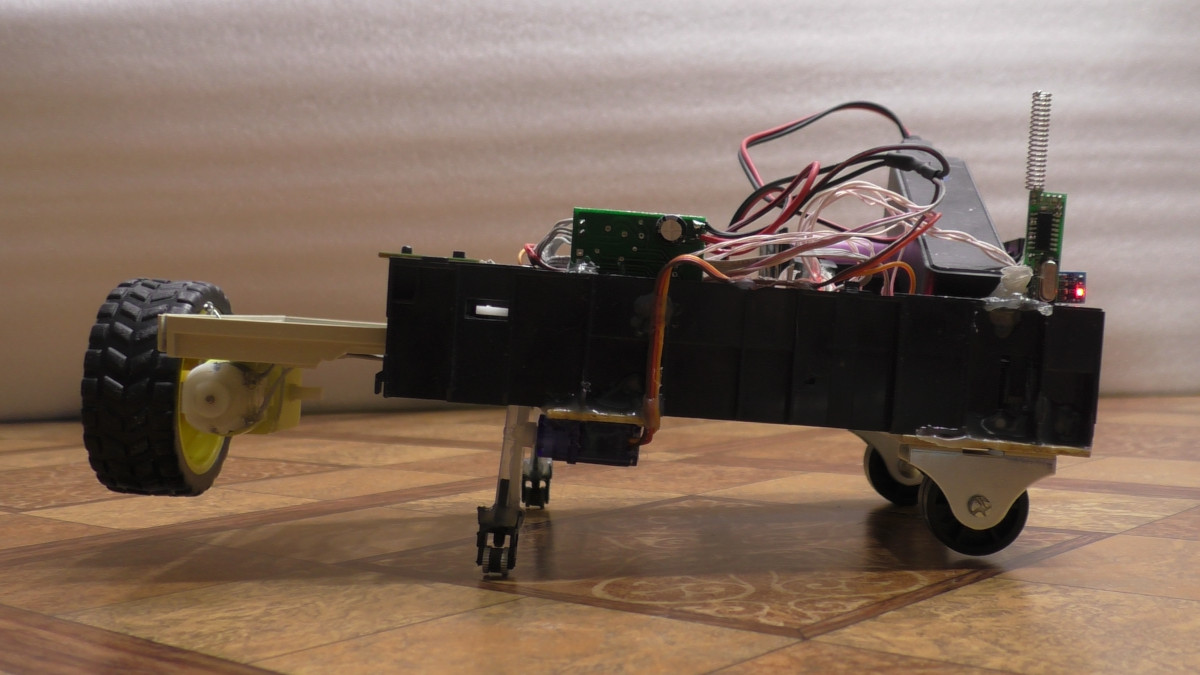
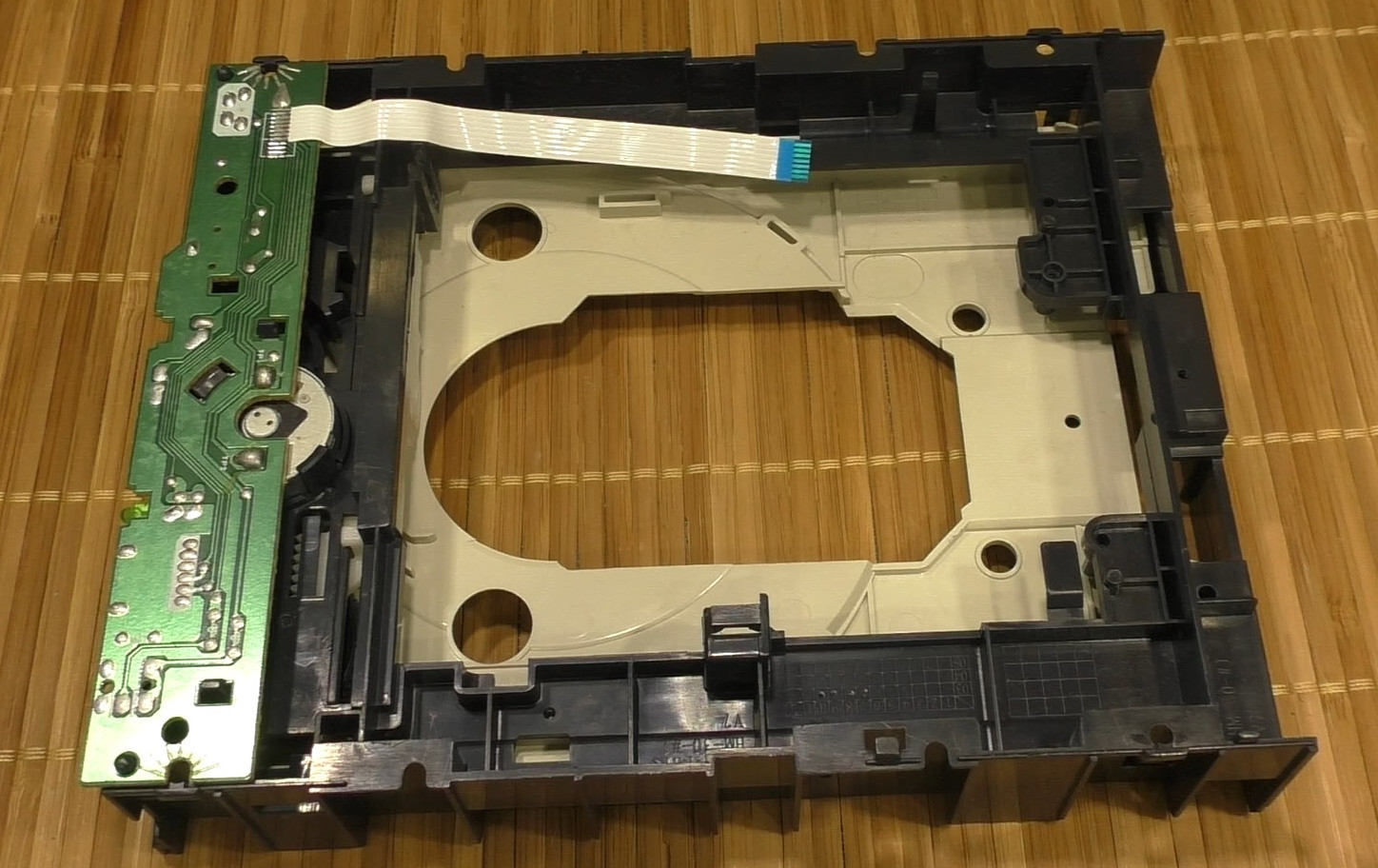
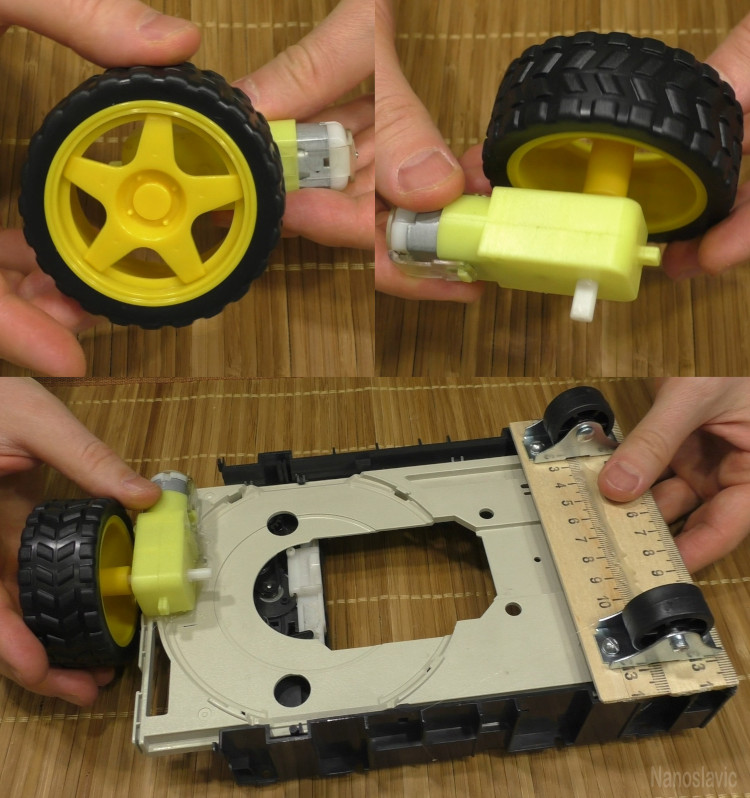
Ahora un poco sobre mi implementación. No lo diré en detalle, ya que todo se hizo de manera fortuita, solo para verificar la capacidad de trabajo de la idea. Utilicé una unidad de CD simple como base, saqué todas las ópticas con una diapositiva, solo había un marco de plástico con una mesa deslizante, un motor y botones para la mesa.
Ruedas de muebles adjuntas como ruedas de soporte.
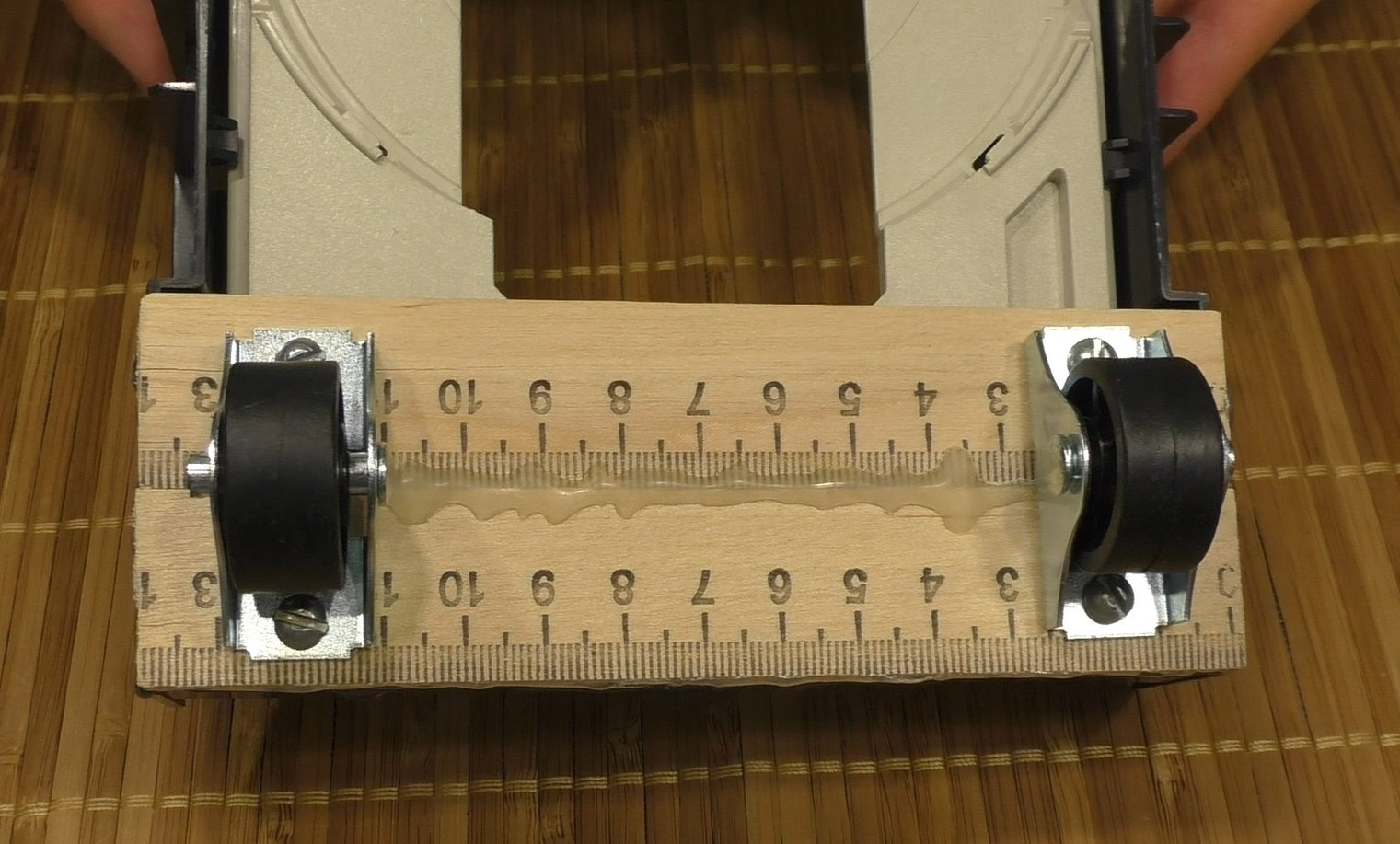
Compré el volante por separado en algún lugar de Internet. Él tiene un motor y una caja de engranajes de plástico.
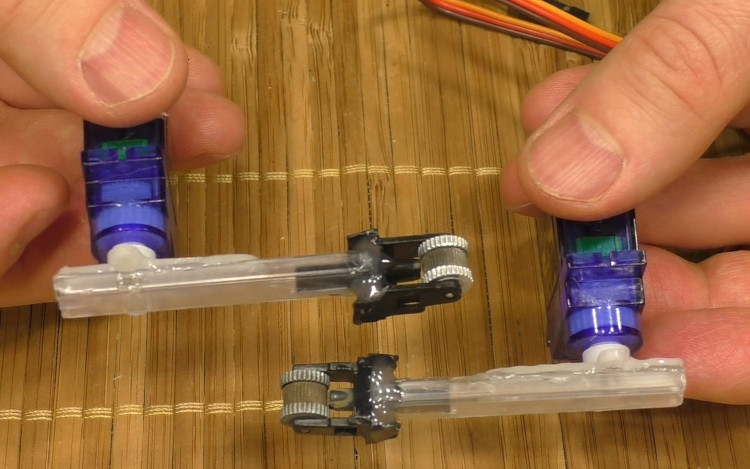
Soportes retráctiles hechos de tubos de plástico, que se venden en chips a granel en la carcasa SO8. Les coloqué una silla de los encendedores, ya que les había quitado el pedernal y el resorte, para que la silla pudiera girar libremente. Para extender los soportes se utilizaron dos servos baratos. Todo se ensambla principalmente sobre adhesivo termofusible.
La electrónica estaba hecha de lo que era, por lo que es muy poco óptima. Para controlar los motores de la mesa de CD y el volante, se utilizó un circuito puente con transistores. Esto hizo posible cambiar la dirección de rotación. Como lógica, algún tipo de placa arduino. Para controlar el movimiento, tomó un llavero y un circuito de respuesta del receptor a una frecuencia de 434 MHz.

Para alimentar los motores, conecté tres baterías de iones de litio en serie sin ninguna protección, así que lo encendí con precaución, a veces comprobando su carga. Para alimentar la parte digital y la radio, utilicé un pequeño banco de energía barato que emitía 5 V.
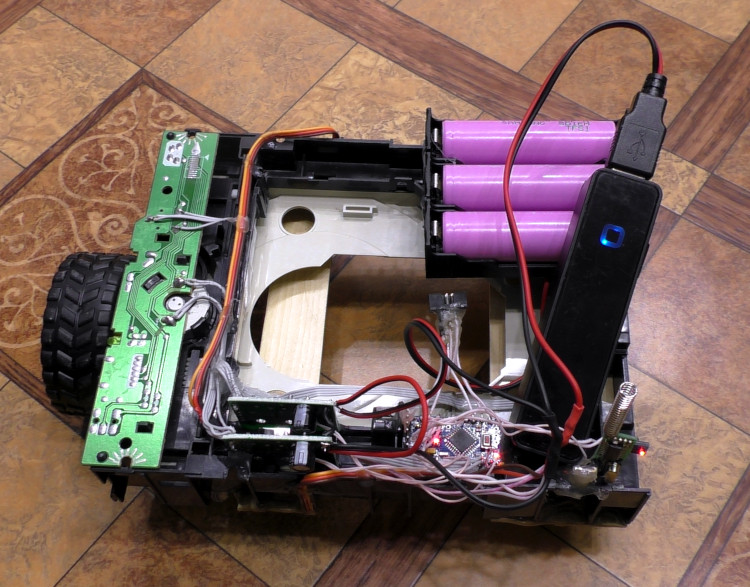
Las baterías en la parte posterior son muy útiles, ya que el volante pesa mucho al empujar hacia adelante.
El programa de control, cuando se enciende, verifica los puntos finales del cajón del CD y restaura el sistema a su estado original. Para el control se utilizan 4 botones. Cuando presiona el botón "Adelante", comienza el movimiento hacia adelante. La detención y el retorno al estado inicial del sistema se produce cuando presiona cualquier botón del control remoto. Cuando se presiona el botón "Atrás", se mueve hacia atrás, también con una parada cuando se presiona cualquier botón. Los botones Izquierda y Derecha funcionan solo en el estado inicial y solo mientras están presionados.
Como resultado, resultó que solo el movimiento hacia adelante funciona normalmente. Cuando se mueve hacia atrás, el centro de gravedad cambia mucho cuando el volante se extiende, por lo que los soportes no pueden levantarlo normalmente. Necesita servos más potentes. Dado que el sistema siempre vuelve a su estado original, el movimiento solo es posible con los "pasos" determinados por la longitud de la tabla para el CD, pero esto es una limitación puramente de software.
Y finalmente, algunos gifs.
Movimiento hacia adelante, vista lateral, 6.8 MB Movimiento hacia adelante, vista superior, 7.8 MB Girar, ver desde arriba, 6.3 MB Creo que todo el sistema se puede simplificar haciendo un panel de control en un bucle y controlando los motores con botones e interruptores. Para controlar los servos, puede hacer un generador simple en los temporizadores 555. La energía se puede hacer con baterías comunes y colocarlas en el control remoto, reduciendo el peso del robot. Tal control remoto le permitirá controlar el robot de forma completamente manual.
Gracias a todos por su atención y buenas artesanías para ustedes.