
Queda poco más de dos meses antes del lanzamiento del robot FEDOR en la ISS, y el proceso de su transformación en un ciber-cosmonauta está casi completo.
En
continuación de esta publicación .
El robot Fedor o FEDOR (Final Experimental Demonstration Object Research) es un robot antropomórfico desarrollado por la ONG Android Technique y la Advanced Research Foundation (FPI), y debe reemplazar a una persona en lugares de alto riesgo.
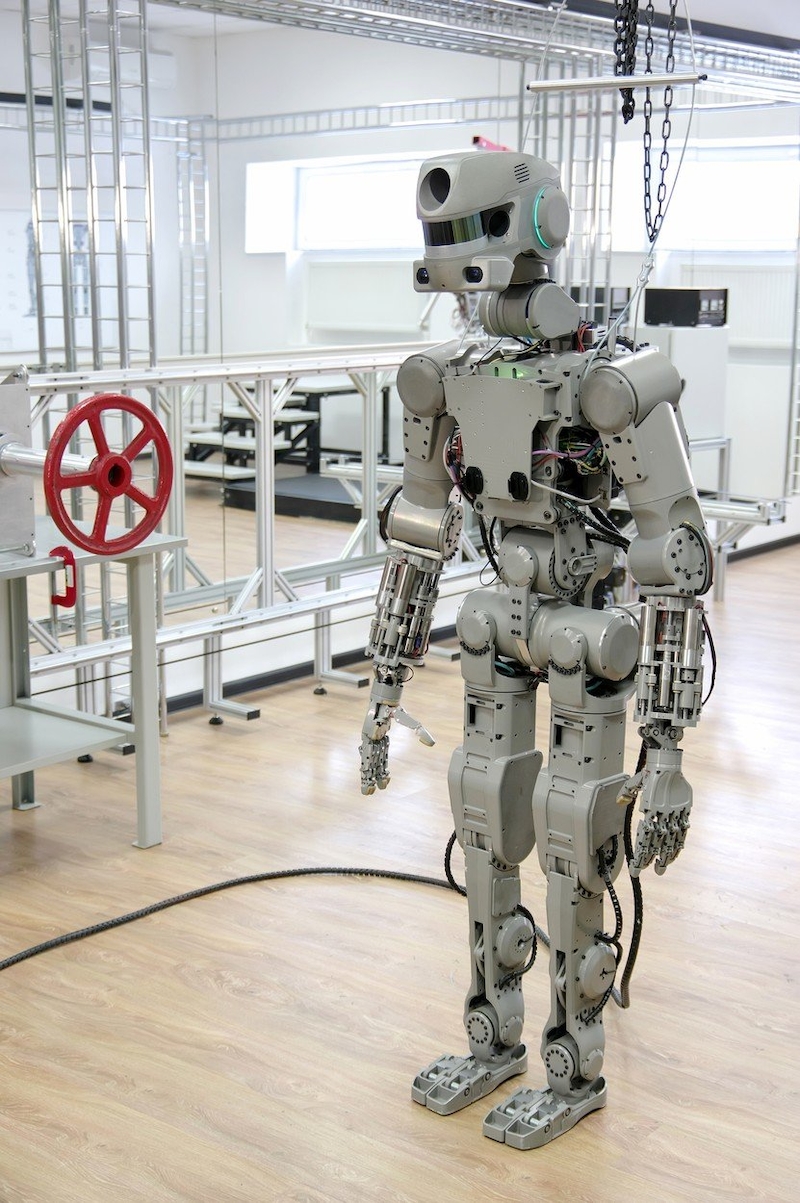 Características del robot FEDOR:
Características del robot FEDOR:- casi 190 cm de alto;
- peso hasta 160 kg (dependiendo de los módulos utilizados);
- potencia de hasta 13.5 kW (20 caballos de fuerza), batería - tipo externo de cartera o cable de alimentación;
- consta de 15 mil partes;
- software: sistema operativo en tiempo real desarrollado en San Petersburgo sobre la base de Linux, software de control en C ++, C # y Python;
- trabajo fuera de línea hasta 1 hora;
- equipado con dos cámaras, cámara termográfica, micrófono, GPS, GLONASS, 15 láseres tipo telémetro y un sistema especial para determinar la posición de su cuerpo;
- los canales de video del sistema de visión estereoscópica del robot pueden funcionar tanto de forma conjunta como por separado (el trabajo conjunto de los canales le permite determinar la distancia a los objetos y separarlos, resolver al menos dos tareas funcionales al mismo tiempo, por ejemplo, realizar acciones de trabajo con dos herramientas diferentes al mismo tiempo);
- modos de funcionamiento: independiente, copia (repite exactamente las acciones del operador);
- la mecánica del robot puede reproducir casi cualquier movimiento del cuerpo humano, y el software, incluidas las bibliotecas reabastecidas, le permite ampliar las habilidades profesionales del robot.
Resulta que en Roscosmos planearon enviar dos robots FEDOR a la ISS simultáneamente en el vehículo no tripulado Soyuz MS el 22 de agosto de 2019.
Este proyecto de prueba espacial se llamó Cyber Crew. Sin embargo, la implementación completa de este proyecto aún está en duda.
El problema es que el robot FEDOR en este caso pasa de acuerdo con los cálculos de diseño, no como equipo científico que se puede colocar de manera compacta en el compartimento de carga y desempaquetado y utilizado a bordo de la EEI, sino como una construcción humanoide completa que debe colocarse como astronautas comunes dentro de la nave. "Unión MS-14".
Dado que, en primer lugar, los astronautas de la ISS no están entrenados para ensamblar un dispositivo tan complejo, y de acuerdo con las instrucciones de la Tierra, podrán ensamblarlo, pero se dedicará un tiempo precioso en esto.
En segundo lugar, este primer vuelo de prueba de la "tripulación cibernética" en cualquier caso debería revelar una gran cantidad de problemas y cuestiones que se resolverán tanto a bordo de la EEI en el modo operativo actual y se tendrán en cuenta y se analizarán para ajustar los proyectos científicos de otras misiones.
Entonces, inmediatamente hubo una necesidad de finalizar los elementos estructurales del robot para los estándares espaciales.
Después de que la primera versión del robot FEDOR fue transferida a Roscosmos y al SP Korolev Rocket and Space Corporation Energia (RSC Energia) para estudiar la posibilidad de su uso en programas tripulados, los ingenieros espaciales de Roscosmos tenían nuevas tareas: prepararse Robot FEDOR para una misión espacial en un tiempo bastante corto.
El complejo transferido a Roscosmos incluye elementos: un robot móvil, paneles de control, herramientas de integración y el segmento terrestre.
Requisitos de espacio para astronautas:
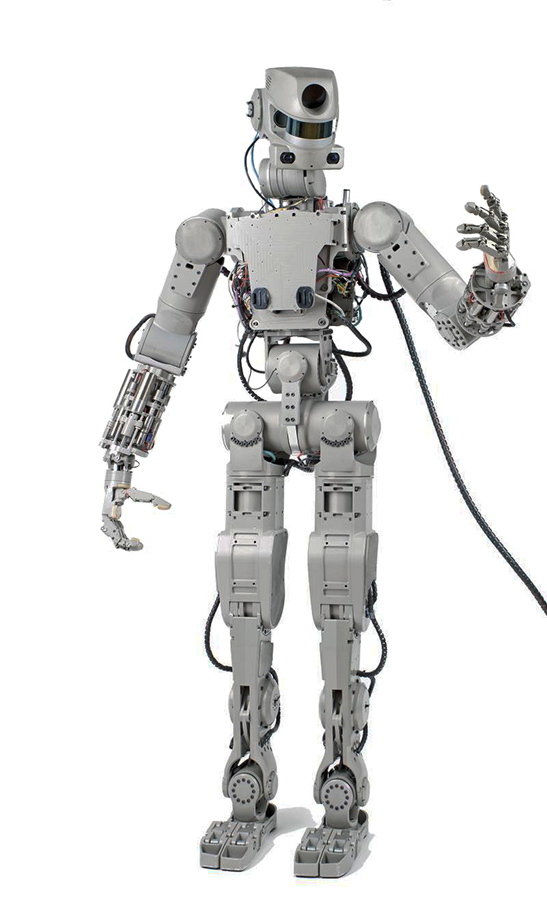
 La versión espacial del robot FEDOR, a diferencia del civil, ha experimentado mejoras:
La versión espacial del robot FEDOR, a diferencia del civil, ha experimentado mejoras:- peso reducido del robot a 105 kg;
- la cintura escapular se redujo unos centímetros (para aumentar el espacio libre a lo largo del diámetro de la escotilla, que era de seis a siete centímetros, y en las pruebas resultó que era inconveniente retirarlo);
- Se reemplazó la batería normal para cumplir con los requisitos de seguridad del vuelo espacial;
- nuevas unidades instaladas;
- El diseño del robot se prueba en un soporte vibratorio.
Por el momento, todos los sistemas del robot adaptado de la versión FEDOR-cosmonauta están operativos y listos para el vuelo.
Pero con la finalización de la silla regular para el robot FEDOR, los ingenieros de RSC Energia tuvieron que jugar.

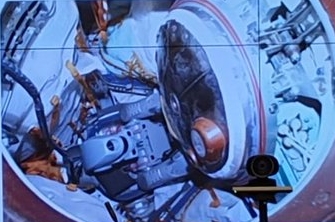
Actualmente, este problema se ha resuelto, el astronauta FEDOR volará a la ISS en la nave espacial Soyuz MS-14 no en el alojamiento habitual del astronauta (resultó que no es suficiente para el robot incluso en el estado más adaptado), sino en un "marco de silla" especialmente hecho de aleaciones de aluminio, que protegerán los componentes y mecanismos del robot de las influencias externas durante el vuelo.
La primera versión del "marco de la silla" para el robot se veía así:
Después de atracar con la ISS, en gravedad cero, los astronautas tendrán que transferir el robot de la nave espacial a la ISS sin ninguna adaptación y continuar trabajando con ella, por lo tanto, en Roscosmos y RSC Energia intentan facilitar esta tarea tanto como sea posible y minimizar el tiempo de transporte del robot como en la etapa de descarga, y en el futuro cuando se pruebe en condiciones espaciales.
En general, el robot antropomórfico Fedor aún no ha abordado la EEI, pero ya ha establecido muchas tareas tanto para los ingenieros en la Tierra como para los astronautas a bordo del complejo orbital.
El lanzamiento del vehículo de lanzamiento Soyuz-2.1a con el vehículo no tripulado Soyuz MS-14 está programado para el 22 de agosto de 2019. La nave espacial permanecerá en la EEI durante aproximadamente una semana y media, y luego regresará automáticamente a la Tierra.
Por cierto, en el marco de este vuelo de prueba, está previsto probar la interacción del sistema de control de misiles digitales y el "relleno" analógico del sistema de rescate de emergencia. Si algo sale mal, entonces el robot debería seguir funcionando.
Y la ISS ahora está rotando la tripulación.
El cosmonauta ruso Oleg Kononenko, el canadiense David Saint-Jacques y la estadounidense Anne McClain regresarán a la Tierra desde la EEI. Llegaron a la estación en diciembre de 2018.
Las trampillas de transición entre la ISS y Soyuz se cerrarán el 24 de junio a las 23.10 hora de Moscú. El desacoplamiento de la estación está programado para el 25 de junio de 2019 a las 2.25, la inclusión de los motores del barco para descender de la órbita es a las 4.54.
El 20 de julio de 2019 está previsto enviar la ISS a bordo de la tripulación de la nave espacial Soyuz MS-13 compuesta por: Alexander Skvortsov, Andrew Morgan y Luca Parmitano.
Por lo tanto, Alexei Ovchinin (Rusia), Tyler Nicholas Haig y Kristina Koch (ambos de EE. UU.) Y los tres nuevos astronautas del lanzamiento de julio se encontrarán con robots FEDOR en la ISS.
El astronauta FEDOR se controla de tres maneras: por radio, fibra óptica o cable eléctrico ordinario.
No solo los astronautas a bordo de la EEI podrán controlar el robot, sino también especialistas técnicos en la Tierra, que se conectarán al robot a través de un canal de comunicación externo y usarán un traje especial de "control" con gafas 3D para ver la situación a través de los ojos del robot.
Es muy interesante qué tareas y experimentos científicos están planificados y se realizarán en la EEI con el robot FEDOR.
Aunque en 2016, se afirmó que el robot FEDOR podrá ir al espacio exterior, realizar tareas de mantenimiento y otros trabajos programados.
Y después de completar pruebas adicionales sobre la compatibilidad electromagnética del robot en la EEI, se probará el canal de comunicación y el cosmonauta FEDOR ejecutará un conjunto de comandos provenientes de la Tierra.
