
Un robot autónomo volador de pequeño tamaño "Bumble" del proyecto Astrobee comenzó a someterse a pruebas de vuelo a bordo de la ISS.
2019 es el año de los robots en la EEI. FEDOR aún no ha llegado, pero ya comenzaron las pruebas de combate de los robots del proyecto Astrobee.

Ya hay dos robots en la estación: estos son Bumble y Honey, y en julio se espera que el tercer robot, Queen, llegue a la EEI.

Sus nombres no se asocian tan fácilmente con la miniatura y tienen una disposición de "abeja".
Estos son pequeños robots autónomos de servicio especialmente diseñados para trabajar en gravedad cero dentro de los módulos de la ISS, diseñados y creados por la
NASA en el centro de investigación Ames , que deberían ser como abejas para realizar parte de las tareas espaciales de rutina y liberar al equipo de la ISS de acciones simples pero frecuentes.
Por lo tanto, el proyecto Astrobee es un sistema de vuelo libre de un complejo de robots, cuyo objetivo principal es probar plataformas automatizadas de pequeño tamaño en condiciones de gravedad cero con la recepción y análisis de datos en condiciones reales y la posibilidad de actualizar y mejorar aún más el software y las funciones de los robots para realizar tareas actuales y nuevas en la ISS.

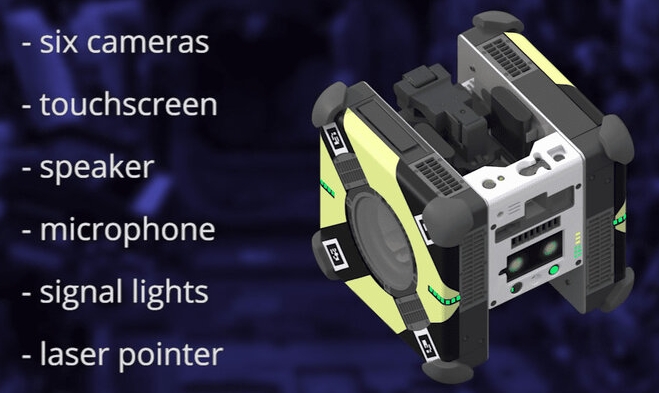
 Características de los robots del proyecto Astrobee:
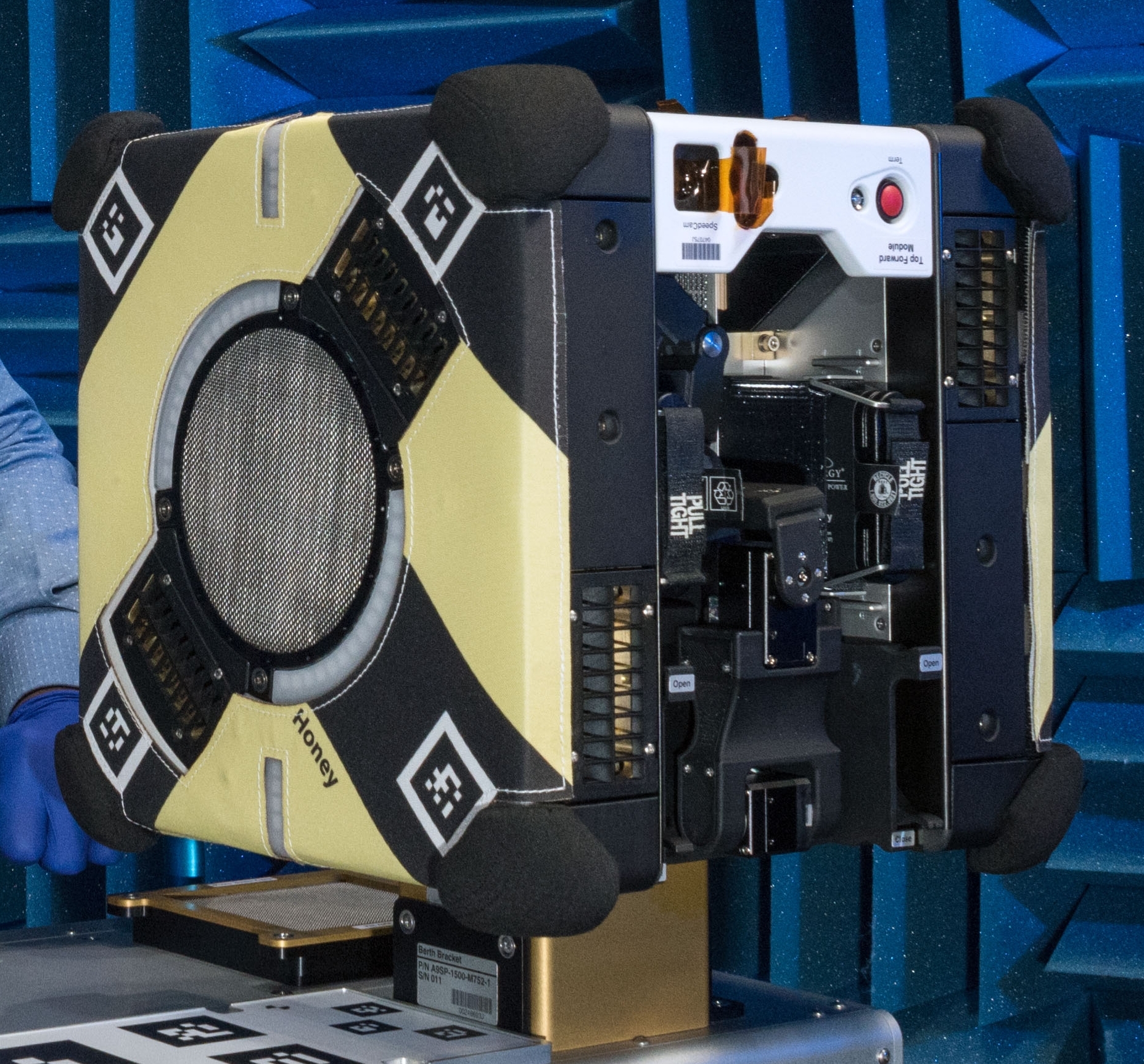
Características de los robots del proyecto Astrobee:- el tamaño de un robot es de 30x30x30 centímetros (1x1x1 pie);
- el cuerpo del robot está cubierto con material blando para minimizar el posible daño cuando golpea un objeto o elemento en la EEI;
- parte de las caras del robot está diseñado para trabajar con cargas pequeñas, incluso hay un sistema para capturar y arreglar objetos con un manipulador plegable para que el robot pueda sujetar y mover de forma segura un objeto de un extremo de la estación al otro, con la ayuda de esta captura, el robot puede fijar su posición cuando necesario, engancharse en pasamanos u otros elementos de la EEI;

- los robots tienen una estación de carga externa separada, que sirve para cargar las baterías de los robots y tomar datos de telemetría;

- los robots solo pueden moverse dentro de la EEI en condiciones de gravedad cero solo si hay una atmósfera en el módulo de trabajo con el robot, su sistema reactivo usa el aire de la estación para moverse;
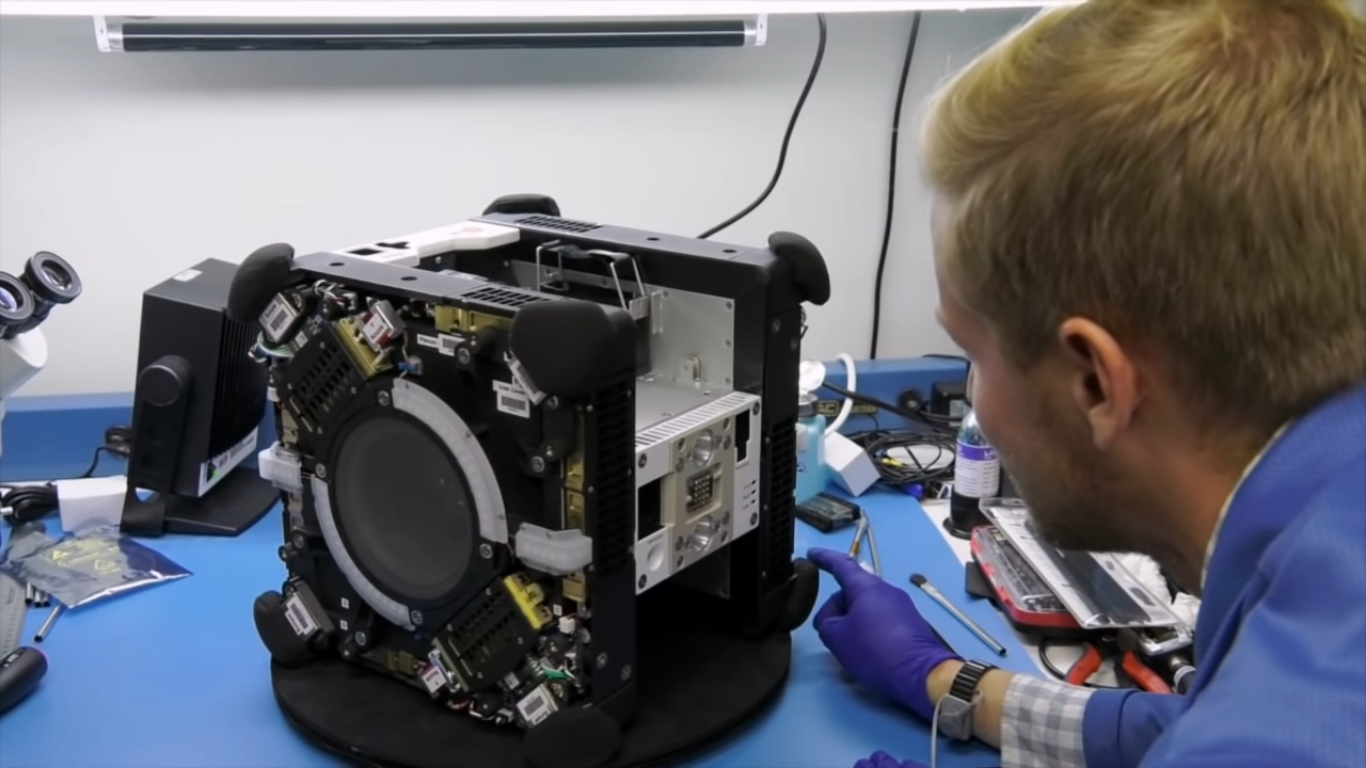
- cada robot tiene su propio sistema de control de computadora para el sistema de ventilador a bordo, que le permite capturar y descargar aire a través de 12 boquillas en la dirección opuesta al vector de movimiento deseado, lo que hace posible que el robot se mueva en cualquier dirección y vuele libremente alrededor de la EEI con gravedad cero;
- los ventiladores del robot se encuentran detrás de una pared protectora especial en las caras de su cubo;
- el sistema informático del robot se ejecuta en Linux, y el módulo que se encarga de trabajar con objetos y moverlos funciona sobre la base de Android, lo que le permite expandir rápidamente la funcionalidad del sistema si es necesario;
-
enlace al repositorio de github con el software del proyecto Astrobee.
- cada robot tiene a bordo: una cámara de navegación principal con un campo de visión de 116 °, varias cámaras HD con enfoque automático que son capaces de transmitir información desde la EEI a la Tierra en tiempo real, y su cámara CamBoard Pico Flexx a bordo permite que el robot reconozca objetos y obstáculos desde una distancia de cuatro metros;
-
cada robot tiene un detector óptico para determinar la velocidad y el procedimiento de parada de emergencia;
- modos de funcionamiento de los robots: autónomos, también pueden controlarse de forma remota, recogerse de forma segura, cargarse si es necesario, apagarlos.
 Funciones de los robots del proyecto Astrobee:
Funciones de los robots del proyecto Astrobee:- la tarea principal de los robots es ayudar a la tripulación en la EEI, realizar una serie de tareas rutinarias para que el personal pueda centrarse en tareas más importantes (realizar experimentos y diversos estudios);
- realice un inventario, documente experimentos, verifique los sistemas ISS y mueva cargas, objetos y herramientas a través de los estrechos pasillos de la estación y entre los módulos;

- realizar el mantenimiento de los módulos ISS cuando no hay personal en ellos o en lugares donde la tripulación no puede alcanzar rápidamente;
- supervisar el funcionamiento de los sistemas y sensores de la EEI;
- Monitorear la calidad del aire, analizar el nivel de concentración de dióxido de carbono en diferentes lugares de la EEI tan a menudo como sea necesario.
 La historia de la aparición de robots del proyecto Astrobee en la EEI:
La historia de la aparición de robots del proyecto Astrobee en la EEI:- La estación de carga se entregó a bordo de la EEI el 17 de noviembre de 2018 y se instaló el 15 de febrero de 2019;


Se utiliza el disyuntor ABB:

- Los robots Bumble y Honey fueron lanzados desde la Tierra a la EEI el 17 de abril de 2019;

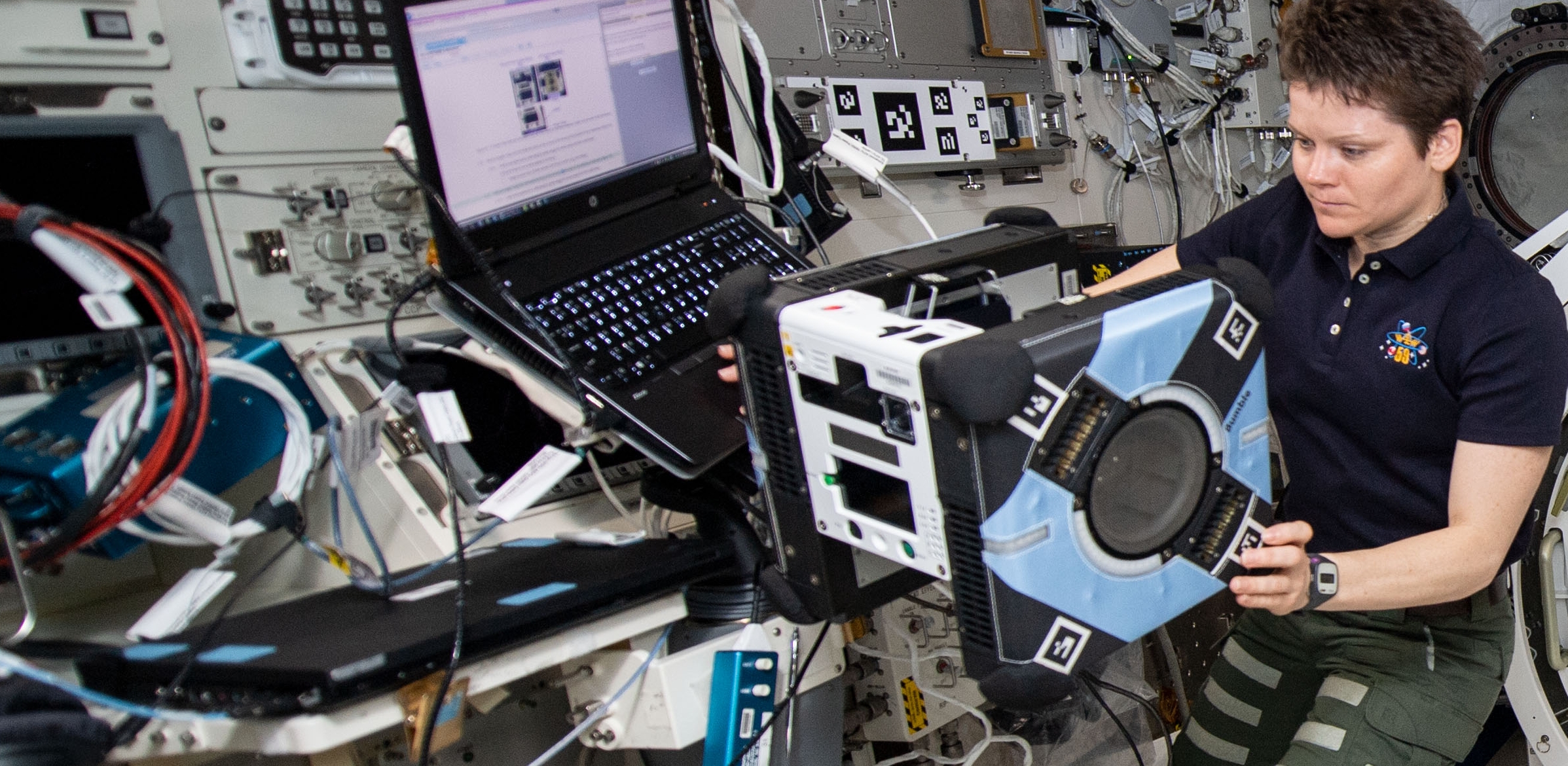
- El 30 de abril de 2019, Ann McClain (astronauta de la EEI) desempacó una caja con el robot Bumble y, con el apoyo del equipo de desarrollo de la NASA del proyecto Astrobee, ubicado en el Centro de Investigación Ames, probó todos los sistemas auxiliares del robot: aviónica, cámaras de video, sistemas propulsores y transferencia de datos y carga de sus baterías;





- El 14 de junio de 2019, comenzaron las pruebas de vuelo con el robot Bumble;
- Julio de 2019: se espera que el tercer robot Queen llegue a la ISS.
Sobre el
primer vuelo del
robot Astrobee
Bumble en la ISS:
El 14 de junio de 2019, el robot Bumble se convirtió en el primer robot del proyecto Astrobee, que realizó el primer vuelo de prueba en gravedad cero.
Antes del primer vuelo del robot Bumble, el equipo del proyecto Astrobee en el Centro de Investigación Ames verificó de forma remota todos sus sistemas a bordo, recibió la confirmación de la Tierra de que el robot puede identificar su ubicación y está listo para navegar dentro de la ISS.
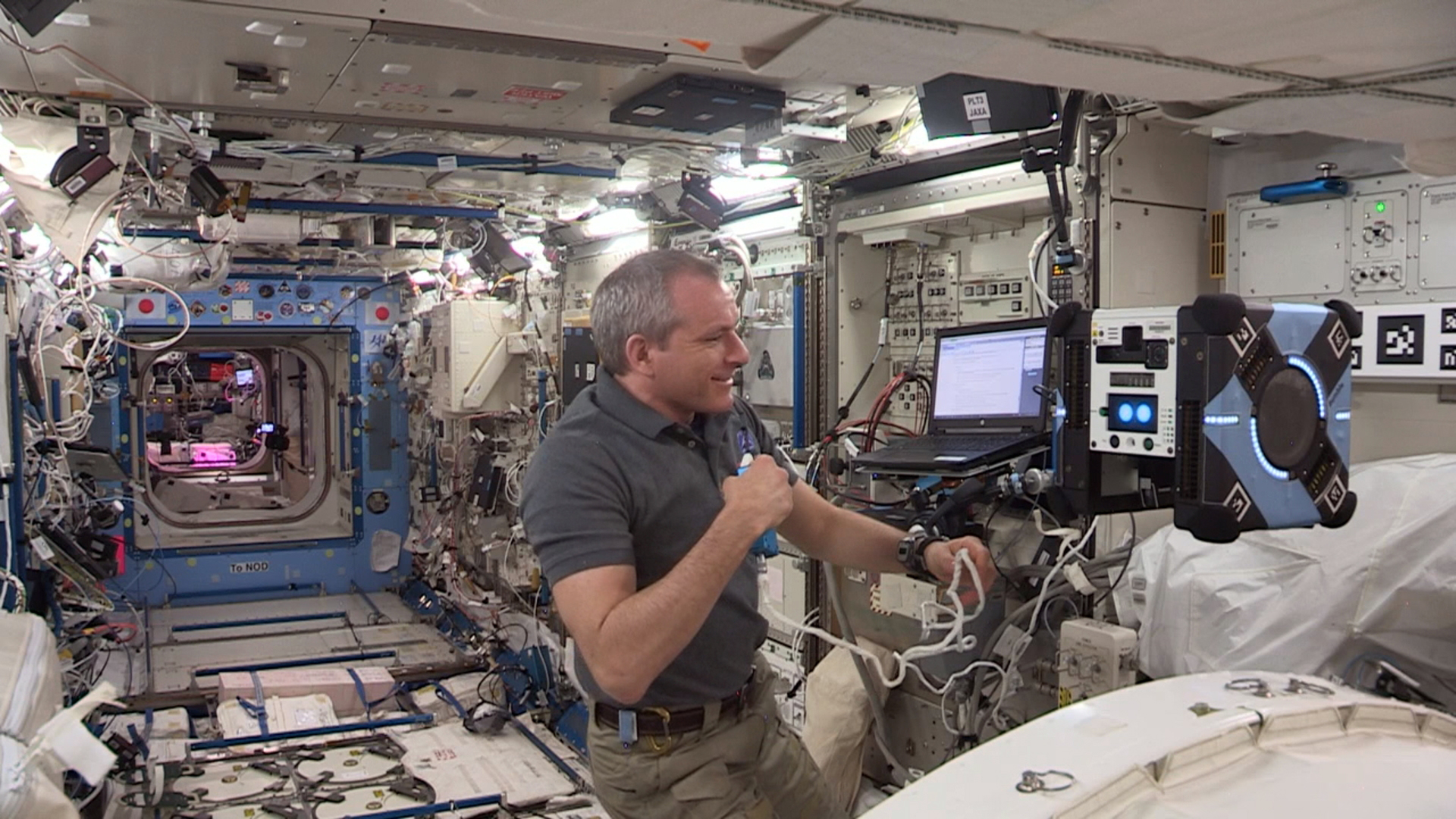
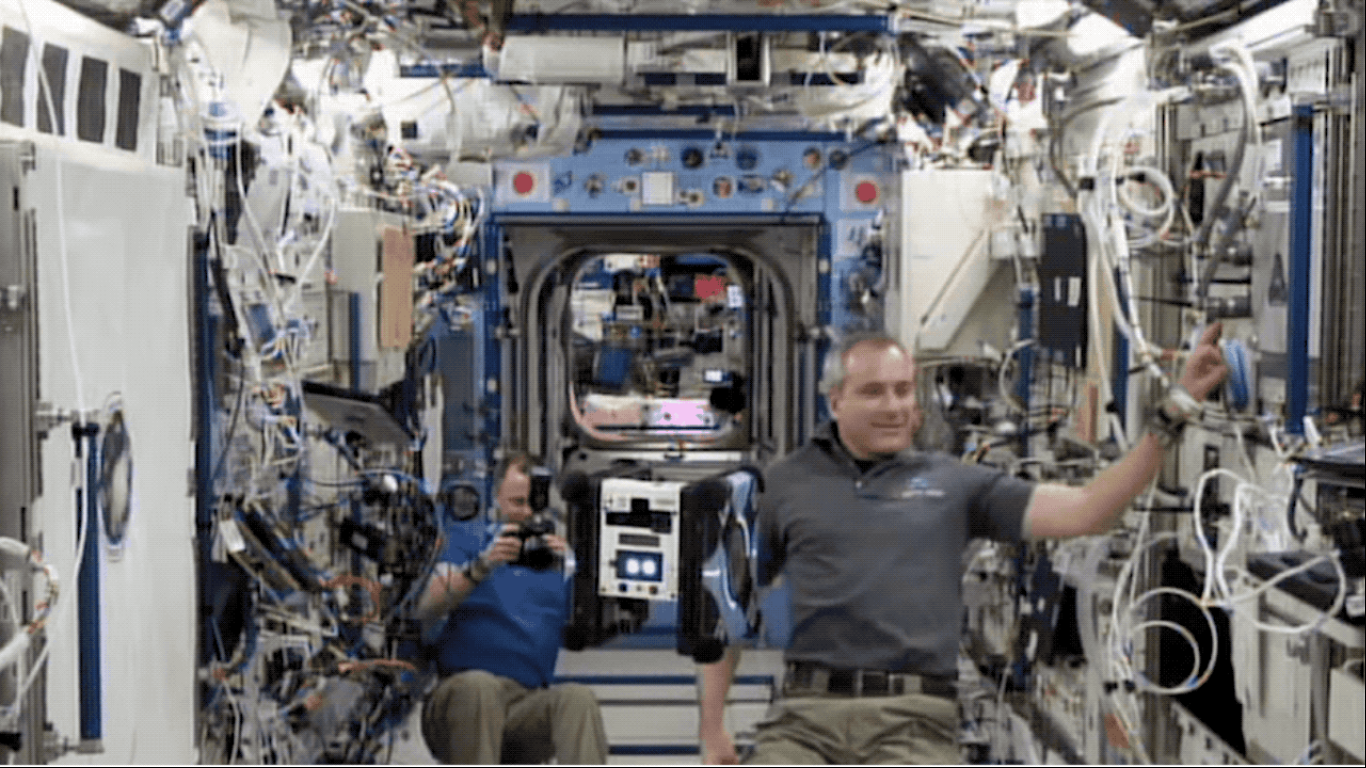
El astronauta de la Agencia Espacial Canadiense David Saint-Jacques brindó asistencia práctica con las pruebas previas al mover manualmente el robot Bumble dentro del laboratorio de ciencias de la EEI en el módulo Kibo para permitir que el sistema de navegación del robot se calibre en el nuevo entorno después del hecho.
El sistema de navegación del robot Bumble utiliza cámaras de tiempo completo para monitorear y monitorear el espacio externo y luego compara las imágenes recibidas con el mapa interior de la ISS previamente cargado en el robot.

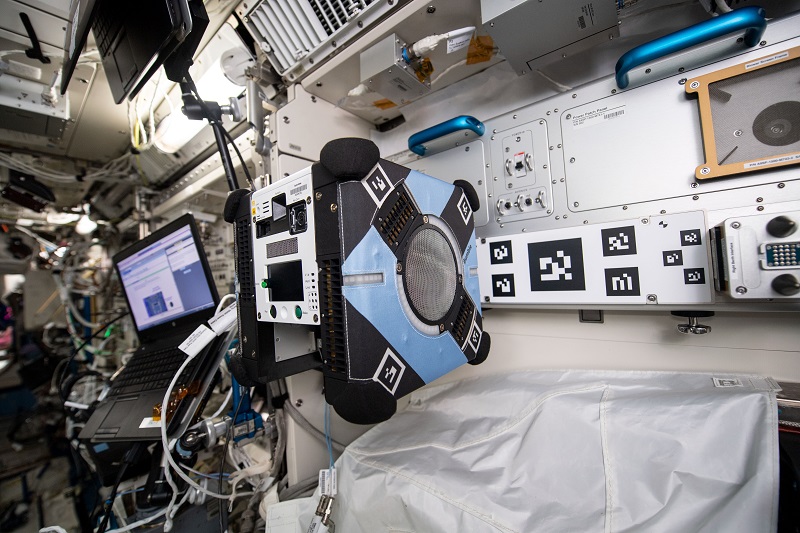
Los robots del proyecto Astrobe están diseñados para moverse en cualquier dirección y rotar alrededor de sus ejes en el espacio a bordo de la ISS.
A continuación, comenzaron las pruebas sobre la operación de los sistemas de vuelo del robot Bumble en modo automático y en modo controlado (remotamente desde la Tierra).
Durante su primer vuelo de prueba del robot Bumble, se verificó el funcionamiento de sus componentes principales en el aire y se realizó un complejo de movimientos básicos, como "volar 11,8 pulgadas (30 centímetros) hacia adelante" o "girar 45 grados hacia la derecha", orientación en el espacio ISS y así sucesivamente.

La NASA planea continuar probando las capacidades de vuelo del robot Bumble con una serie de maniobras cada vez más complejas para determinar qué tan bien pueden funcionar sus elementos en gravedad cero y qué ajustes deben hacerse al software para su uso posterior.
Con base en los resultados del complejo de estas pruebas de vuelo, se crearán configuraciones básicas para el sistema de propulsión de robots del proyecto del proyecto Astrobe, con la ayuda de la cual se planea ayudar a los robots Bumble, Honey y Queen a prepararse para asumir los roles de los nuevos miembros de la tripulación de la ISS.
El primer vuelo del robot "Bumble" 
