Uno de los desastres tecnológicos más graves en la historia de la humanidad ocurrió el 26 de abril de 1986. Y luego casi se repite el 12 de marzo de 2011. Como habrás adivinado, estamos hablando de accidentes en la central nuclear de Chernobyl en la URSS y en la central nuclear de Fukushima-1 en Japón. La serie "Chernobyl", filmada por HBO, una vez más avivó el interés en la historia del accidente de Chernobyl y recordó lo difícil que fue detener la liberación de radionucleidos del reactor destruido a la atmósfera. Por separado, hablaron sobre el uso fallido de los robots y el llamado forzado a la ayuda de las personas. Japón lleva a cabo numerosos experimentos con una variedad de robots que pueden retrasar la necesidad de atraer a la gente a la erradicación.
Los accidentes en la planta de energía nuclear de Chernobyl y Fukushima tienen diferentes causas y una crónica diferente de los eventos, pero tienen una cosa en común: la vasta área alrededor de las estaciones está infectada, lo que les hace imposible vivir de manera segura durante mucho tiempo, y no hay duda de una limpieza completa de las unidades de energía. En ambos casos, la humanidad no estaba preparada para enfrentar las consecuencias: cientos de miles de personas en la URSS trabajaron en la descontaminación de la zona de exclusión y en la construcción de un sarcófago protector sobre el reactor. En Japón, fueron por el otro lado.
Referencia: estándares de exposición
La frase sobre el fondo de radiación de la serie de Chernobyl logró convertirse en un meme en Internet extranjera: "3.6 los rayos X no son nada bueno, pero no son terribles". De hecho, ¿vale la pena tener miedo de estos mismos 3,6 rayos X por hora o realmente no es un fondo terrible? Para comprender mejor las medidas de Fukushima que se dan en la publicación a continuación, primero debe comprender la escala de dosis y su efecto en el cuerpo.
La radiografía (P), que los rusos conocen bien, es una unidad obsoleta de medición del fondo de radiación que no está incluida en el sistema SI. Ahora se usa Sievert (Sv) en su lugar. En pocas palabras, 1 Sv es igual a 100 R. Es decir, 3.6 R / h es 0.036 Sv / ho 36 mSv / h. En Rusia, en algunos institutos de investigación se puede ver un panel con el fondo actual, medido en rayos X. En promedio, el entorno urbano en nuestro país fluctúa a un nivel de 12-20 μR / ho 0.12-0.2 μSv / h. Una persona recibe una dosis de aproximadamente 2.4 mSv por año del fondo de radiación natural en nuestro planeta (dependiendo del país y la altitud). Esta radiación proviene del espacio, proviene del suelo, el agua, está presente en el aire, gracias al gas radón.
Y ahora una pequeña tabla con las dosis que recibimos a lo largo de nuestras vidas (la exposición única que se indica a continuación es la recepción de la dosis adecuada por hasta 4 días):


Volvamos a los 3.6 R / h mencionados en la serie. 0.036 Sv / h (36 mSv / h) realmente no es un fondo terrible en caso de accidente, para el desarrollo de enfermedad por radiación leve es necesario permanecer en la zona de peligro durante más de un día, y el trabajo de reparación durante varias horas es bastante seguro y aceptable. Y ahora recordamos cómo un poco más tarde dijeron en la serie que el fondo en el reactor no es 3.6, sino 15,000 rayos X (150 Sv / h). Cuatro minutos con tal trasfondo implican la muerte inevitable. Después de dos minutos, solo la atención médica calificada más rápida puede dar una oportunidad de salvación, y 25 segundos son suficientes para contraer la enfermedad por radiación.
Toshiba en Fukushima
La asociación entre Toshiba y la Compañía de Energía de Tokio (TEPCO) comenzó ya en la fase de construcción de la central nuclear de Fukushima-1. Toshiba fue responsable de la construcción de reactores de tipo BWR para la tercera y quinta unidades de potencia, encargadas en 1976 y 1978, respectivamente. Entre las ventajas de los reactores BWR se encuentra una presión de vapor más baja en el circuito primario que, por ejemplo, el VVER soviético, y temperaturas de funcionamiento más bajas. Las desventajas incluyen la complejidad de la fabricación, la necesidad de un caso de gran tamaño, la complejidad del control y la radiólisis en los elementos combustibles, lo que implica la generación de hidrógeno explosivo.
Si el accidente en la planta de energía nuclear de Chernobyl fue causado por la falta de diseño del reactor RBMK, que se hizo sentir durante las violaciones durante las pruebas, entonces dos desastres naturales condujeron al incidente de Fukushima. Un terremoto con una magnitud récord de 9.0–9.1 condujo al apagado de los reactores, y el tsunami resultante inundó el territorio de Fukushima-1 y los generadores de emergencia que suministran las bombas de enfriamiento del reactor. Los reactores de la estación, que incluso en el caso de una parada de emergencia, no se enfrían inmediatamente, se dejaron sin una entrada de agua fría, lo que hizo que se evaporara, aumentara la presión y la temperatura del vapor en el interior, generara hidrógeno debido al contacto del vapor de circonio en los elementos combustibles (reacción de vapor de circonio) y su posterior explosión. . En la primera, segunda y tercera unidades de potencia, el núcleo del reactor se derritió y el combustible nuclear se filtró. En Fukushima, los radionucleidos fluyen hacia el océano junto con el agua de enfriamiento; en la central nuclear de Chernobyl durante un incendio, ingresaron a la atmósfera y se extendieron por toda Europa.
 Crónica de lo que sucedió en tres unidades de poder. La cuarta unidad de potencia también se vio afectada, pero no había combustible nuclear en su reactor, por lo que solo hubo un incendio. Fuente: Roulex_45 / Wikimedia
Crónica de lo que sucedió en tres unidades de poder. La cuarta unidad de potencia también se vio afectada, pero no había combustible nuclear en su reactor, por lo que solo hubo un incendio. Fuente: Roulex_45 / Wikimedia
Para eliminar el accidente de Fukushima, es necesario compilar un mapa de daños, encontrar combustible fundido y sus puntos de fuga, eliminar el combustible nuclear gastado de los reactores y las piscinas, desmontar los escombros, es decir, realizar un trabajo tremendo bajo un fondo de radiación igualmente colosal. Ahora, este trabajo en FAES lo realizan robots y automóviles a control remoto: enviar personas a la zona del accidente es demasiado peligroso, en algunos lugares de la estación el fondo puede matar a una persona en solo unos minutos.
Toshiba, junto con el Instituto Internacional de Investigación para el Desmantelamiento de Reactores Nucleares (IRID), se dedica al desarrollo de robots para tareas específicas: inspección de las unidades de energía de Fukushima y descontaminación (limpieza) de las habitaciones contra la contaminación radiactiva. Hablaremos sobre algunos de los robots Toshiba más notables que han hecho su pequeña pero importante contribución a la causa del accidente.
Por cierto, existe una opinión errónea de que la liquidación de Fukushima no tuvo en cuenta la valiosa experiencia de Chernobyl. Esto es fundamentalmente incorrecto. Inmediatamente después del accidente, se creó un grupo de expertos japonés-rusos en el campo de la energía nuclear para hacer frente a las consecuencias del accidente de Fukushima-1, entre los cuales se encontraba Larion Aleksandrovich Lebedev, un participante directo en la planta de energía nuclear de Chernobyl desde el verano de 1986, que fue miembro del Instituto de Física de Ingeniería de Moscú, que hizo una gran contribución. en el estudio de las condiciones de radiación y la construcción del sarcófago. Después del accidente en Japón, Larion Lebedev mejoró la tecnología para la separación del tritio del agua radiactiva, lo que nos permitió comenzar a limpiar los enormes volúmenes de agua pesada que quedan después de enfriar los reactores destruidos. En nombre del gobierno japonés, Larion Alexandrovich recibió la Orden del Sol Naciente, otorgada por méritos militares y civiles.
Scout de cuatro patas
El primer robot Toshiba en ingresar al FAES fue el dron sin nombre de cuatro patas, cuyo desarrollo comenzó inmediatamente después del accidente. Su misión, como todos los robots lanzados en la planta de energía en los primeros años, era el reconocimiento de radiación y la evaluación de daños dentro de las unidades de energía.
Se instalaron un dosímetro y seis cámaras en el chasis para inspeccionar las instalaciones de la estación. La electrónica protegida fue diseñada para operar con una radiación de 100 mSv / h durante un año (con una jornada laboral de 10 horas) y con un fondo mucho mayor durante períodos cortos. Es cierto que una carga de batería solo fue suficiente para 2 horas de existencia autónoma. El robot se movió a una velocidad de aproximadamente 1 km / h, que es suficiente cuando se examina una unidad de potencia destruida. La gestión se realizó por el aire con redundancia en caso de interferencia.
En la parte inferior del dispositivo, se conectó un pequeño avión no tripulado de reconocimiento, que podría desprenderse de su portador y arrastrarse a lugares estrechos donde un robot alto no podía pasar. Se suponía que debía usarse para buscar fugas de agua de enfriamiento debajo de las tuberías del reactor.
Esto no quiere decir que se hayan depositado grandes esperanzas en el robot: incluso en la etapa de la manifestación, los periodistas señalaron la lentitud de la máquina: tomó hasta un minuto subir cada escalón de la escalera y, al colocar el pie en una superficie inestable, el robot podría darse la vuelta.
Sin embargo, el primer mecanismo experimental de Toshiba para el FAES aún logró penetrar en el edificio de la segunda unidad de potencia y realizar un pequeño reconocimiento. TEPCO publicó un informe el 11 de diciembre de 2012. El robot tomó fotos de una de las tuberías, confirmando la ausencia de fugas. En marzo de 2013, entró cinco veces más. Pero pronto, mientras intentaba inspeccionar aún más las instalaciones, el robot perdió el equilibrio en las escaleras y cayó a un lado. Debido a la falta de un mecanismo de giro, el explorador de cuatro patas permaneció acostado en el segundo bloque.
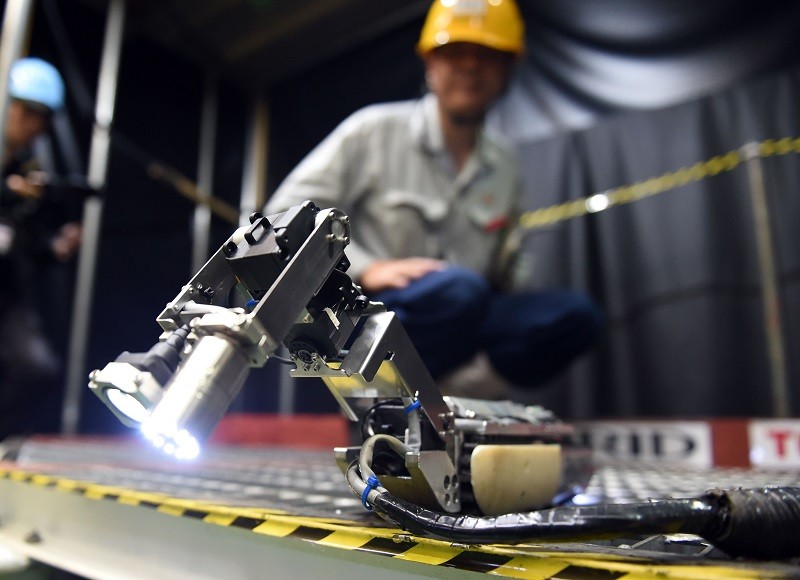
Escorpión explorador plegable
El siguiente robot de la compañía, que tuvo en cuenta todas las deficiencias del modelo anterior, fue el Toshiba Scorpion, llamado así por su forma (foto del título). Fue desarrollado para una tarea muy difícil: estudiar el fondo del reactor y buscar barras de combustible, y esta misión implica trabajar con un gran fondo de radiación. Scorpion se salvó de las patas, que fueron reemplazadas por rieles, y para ser compacto, el diseño fue plegable: se suponía que el automóvil debía ser arrojado al reactor a través de los pasajes para cargar las barras de combustible. En el modo operativo, el robot levanta su manipulador de cola, moviéndose a lo largo de tres ejes a la manera de un escorpión, al final del cual se adaptan una cámara y LED de luz de fondo en lugar de la picadura. Otra cámara está montada en la parte delantera y siempre mira hacia adelante.
Scorpion es controlado por el operador a través del cable, por lo que no hay problemas con la transmisión de potencia y señal. Además, el robot se hace retornable, no debe permanecer en el reactor después de que se transmite el testimonio. Inclinarlo no tiene miedo, la "cola" con la cámara devuelve al robot a su posición normal.
Durante varios años, Scorpion fue finalizado para finalmente ingresar al FAES; con el tiempo, recibió un pequeño cañón de agua para despejar el camino, un balde y un cortador para trabajar con corium. En febrero de 2017, el robot fue al reactor, donde midió el fondo y grabó un video. El dosímetro mostró una impresionante 210 Sv / h (21,000 R). En la sala contigua, donde había trabajadores cargando el robot en la tubería, el fondo era de 6 mSv / h.
ROV: pequeño submarino
 Un pequeño submarino con cámaras de video, que tienen grandes expectativas. Fuente: Toshiba
Un pequeño submarino con cámaras de video, que tienen grandes expectativas. Fuente: Toshiba
Una herramienta subacuática controlada remotamente, o ROV para abreviar, es el primer robot flotante de Toshiba construido para estudiar el reactor de la tercera unidad de potencia, cuya parte inferior está oculta debajo de una columna de agua de seis metros. Este pequeño submarino con unas dimensiones de 30 x 13 cm y un peso de 2 kg lleva dos cámaras y una luz de fondo, está controlado por cable y puede moverse bajo el agua en cualquier dirección con gran precisión. El dispositivo es controlado por el operador, y la señal y la alimentación se suministran a través de un cable largo. Para evitar que el cable se enrede y se adhiera a los escombros, Toshiba desarrolló un recubrimiento especial con una fricción mínima, y se instalaron dos potentes motores en el propio ROV, para que el robot pueda arrastrar fácilmente el cable junto con él.
Por cierto, el diámetro del ROV de 14 cm se debió a una entrada estrecha en el recipiente del reactor de la tercera unidad de potencia, por lo que los ingenieros de Toshiba tuvieron que trabajar duro para adaptar la electrónica, la protección y los motores en una carcasa tan compacta. Al final de un curso intensivo de capacitación de dos meses para operadores, Toshiba ROV fue a la FAES. El robot visitó el reactor el 19, 21 y 22 de julio de 2017 e inspeccionó con éxito las entrañas destruidas.
SC-ROV magnético
Otro lugar inaccesible en el que se acumulaba agua con radionucleidos eran las cámaras de alivio de presión toroidales ubicadas debajo del reactor. Era necesario enviar un robot para buscar fugas debajo de la cámara, pero el asunto se complicó por el hecho de que la contención se inundó: el robot debía inspeccionar las tuberías sumergidas en agua fangosa. Los dispositivos flotantes no eran adecuados para esto, se necesitaba una sonda que se fijara en la tubería y pudiera viajar a lo largo de ella sin deslizarse incluso en un ángulo grande.
¿Cómo fijar el robot en una tubería de acero para que no ruede? Con la ayuda de imanes. El SC-ROV de Toshiba fue diseñado específicamente para la cámara de alivio de presión. Es un chasis con ruedas hechas de potentes imanes de neodimio. Con cuatro cámaras y un marcador, el operador puede moverse a lo largo de la superficie de una tubería sumergida bajo el agua y marcar los agujeros encontrados.
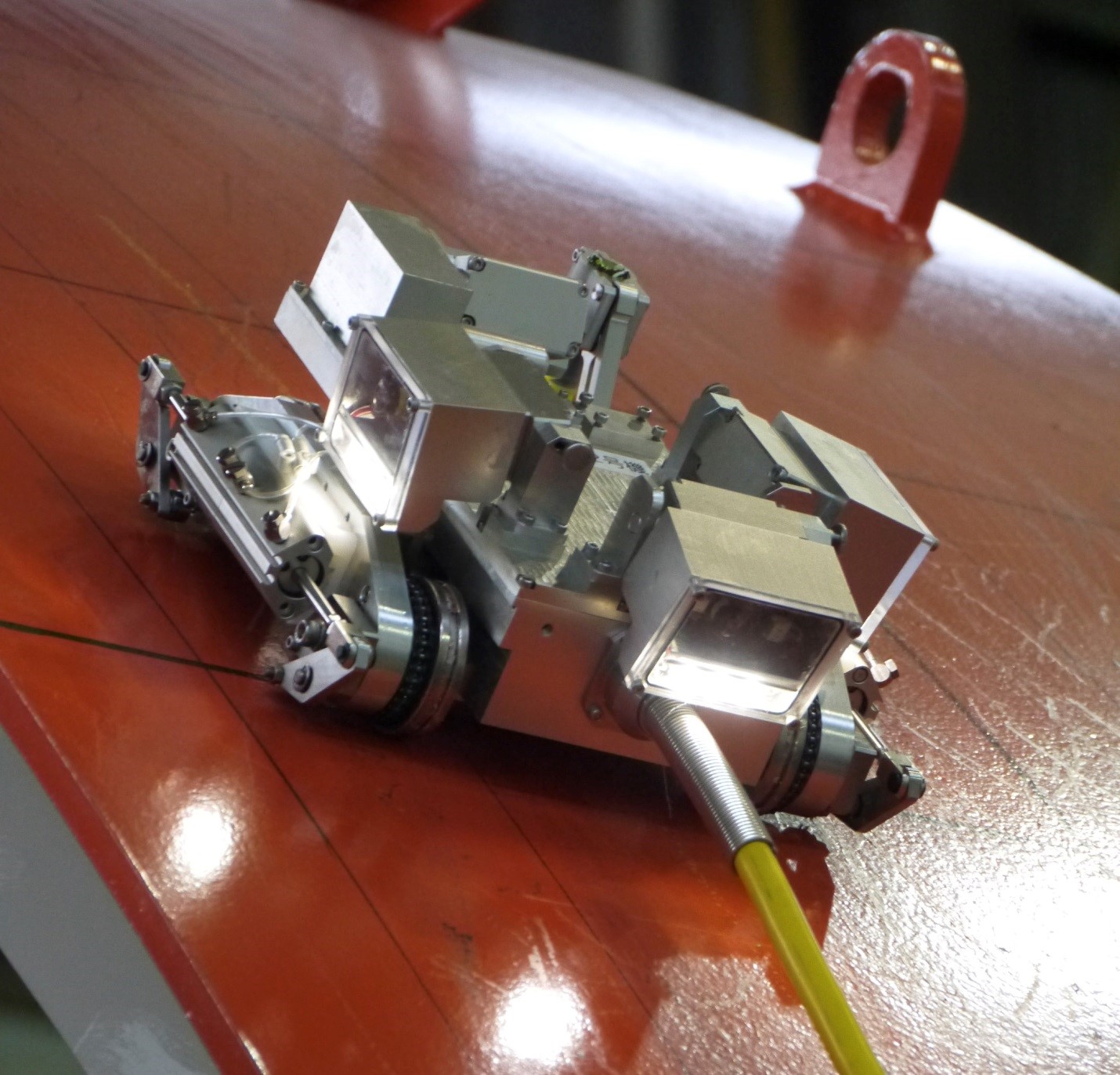 Durante la demostración, SC-ROV mantuvo los imanes perfectamente en la superficie inclinada. Pero las condiciones reales eran mucho más duras. Fuente: IRID
Durante la demostración, SC-ROV mantuvo los imanes perfectamente en la superficie inclinada. Pero las condiciones reales eran mucho más duras. Fuente: IRID
Según los resultados de SC-ROV en 2014, no se encontraron fugas, pero se encontraron problemas en el funcionamiento del dispositivo. En primer lugar, debido a la turbidez del agua, el rango de visibilidad no superó los 30-35 cm, lo que ralentizó significativamente la búsqueda. En segundo lugar, debido a algunos defectos en la superficie de la tubería, el robot se deslizó cuando se inclinó a 120 °.
Corium Search Camera
Misiones de búsqueda anteriores han mostrado una imagen deprimente: el combustible nuclear en el reactor de la segunda unidad de potencia ha ido más allá del recipiente del reactor. Las fotografías de la rejilla derretida en el fondo de la contención dejaron en claro que el combustible ya estaba en algún lugar en el fondo. ¿Pero la contención lo retuvo o el corium se hundió en el suelo? Era necesario enviar un nuevo robot al mismísimo "infierno" del antiguo reactor a un combustible increíblemente desvanecido.
 La rejilla fundida dentro de la contención del segundo reactor está exactamente por encima del accionamiento de las barras del sistema de control y protección. Fuente: TEPCO
La rejilla fundida dentro de la contención del segundo reactor está exactamente por encima del accionamiento de las barras del sistema de control y protección. Fuente: TEPCO
Los robots rastreadores solo funcionan en un piso plano, y un submarino necesita un espesor de agua. A Toshiba se le ocurrió una cámara de telecontrol montada en el extremo de un tubo telescópico de cinco metros. Independientemente del ángulo de entrada de la tubería en la contención, la cámara toma una posición estrictamente vertical: la unidad principal está sujeta por un cable de control, es decir, la cámara parece "colgarse del cable". Su lente gira 360 ° horizontalmente y 120 ° verticalmente. De hecho, hay dos cámaras en el dispositivo a la vez, trabajando directamente y una cámara para orientación. Además de las lentes, hay una luz de fondo, un dosímetro y un termómetro instalados en la unidad. El dispositivo soporta la dosis absorbida de hasta 1000 grises.
La primera versión de la cámara funcionó en Fukushima en enero de 2018, donde encontró con éxito el corium y midió el fondo a 530 Sv / h (53,000 rayos X). Pero el trabajo no terminó allí: se requirió tomar muestras para su análisis. En la versión actualizada del dispositivo, se mejoró la luz de fondo y se agregó un brazo deslizante. En febrero de 2019, la cámara con control remoto de Toshiba recibió por primera vez una muestra de corium de la segunda unidad de potencia.
Máquina de limpieza
Las instalaciones de las unidades de potencia tendrán que desactivarse tarde o temprano, pero primero debe trazar un mapa de contaminación. Los resultados de numerosas misiones de investigación mostraron una imagen muy sombría: al contrario de lo esperado, la mayoría de los radionucleidos se asentaron no en el piso y no en las paredes, sino en los elementos de nivel superior, como tuberías y ventilación, representaron hasta el 70% de toda la radiación. Descontaminar el piso es relativamente simple, las paredes son un poco más complicadas, pero ¿cómo se llega a la suciedad en el techo y en las complejidades de las tuberías, dado que la altura de los techos en el primer piso es de 7-8 metros?
 Toshiba "limpiador" de radionúclidos: se eleva 8 metros de altura y raspa las paredes con diligencia. Fuente: IRID
Toshiba "limpiador" de radionúclidos: se eleva 8 metros de altura y raspa las paredes con diligencia. Fuente: IRID
Toshiba ha desarrollado un robot que opera un cañón con hielo seco: el polvo de hielo cubre la superficie, une las partículas radiactivas y el robot lo raspa y absorbe. El mecanismo eleva la estructura a una altura de 8 metros. Como esta es otra máquina telecontrolada, su operador recibe una imagen de 22 cámaras al mismo tiempo. La máquina comenzó a limpiar las unidades de potencia en enero de 2016. Su productividad es pequeña, pero incluso una pequeña contribución a la descontaminación de la estación es valiosa.
Ayuda pero no solución
Han pasado 33 años desde el accidente en la planta de energía nuclear de Chernobyl, desde entonces la tecnología ha hecho un gran avance. Ahora, decenas de robots y tipos de equipos de construcción telecontrolados participan en la eliminación de las consecuencias en Fukushima. El sitio web de TEPCO ha publicado muchos informes, cuyos datos en su conjunto forman una imagen muy triste: hay robots y hay tecnologías, pero no todos se acercaron a la efectividad de los liquidadores de Chernobyl. El desarrollo y las pruebas de robots lleva meses y años, y el resultado de su trabajo es el avance de una docena de metros, la recopilación de datos dosimétricos, un video turbio y la finalización frecuente de misiones debido a problemas imprevistos.
Todos los robots en Fukushima son personas salvadas, y cada vida humana vale la pena participar en el desarrollo de robots. Pero los planes actuales de TEPCO dejan en claro que, de acuerdo con estimaciones conservadoras, tomará al menos 30-40 años lidiar con las consecuencias del accidente. Y esto solo confirma el heroísmo y la escala de la hazaña de los liquidadores soviéticos de Chernobyl.