
La tripulación que se dirigía a la EEI el 20 de julio de 2019, pasó sesiones de entrenamiento con el robot FEDOR en el centro de entrenamiento de cosmonautas (CPC).
En continuación de estas publicaciones:
La escotilla de la nave espacial Soyuz MS-14 resultó ser estrecha para el robot FEDORCómo modificar el robot FEDOR y la silla de vuelo ISSLas tripulaciones se están mudando a la ISS, esta semana la ISS regresó a la Tierra desde la ISS: el cosmonauta ruso Oleg Kononenko, la canadiense David Saint-Jacques y la estadounidense Anne McClain.
Ahora en la estación hay: Alexey Ovchinin (Rusia), Tyler Nicholas Haig y Christina Koch (ambos de los Estados Unidos).

El 20 de julio de 2019 está previsto enviar la ISS a bordo de la tripulación de la nave espacial Soyuz MS-13 compuesta por: Alexander Skvortsov, Andrew Morgan y Luca Parmitano.
Por lo tanto, dos cosmonautas rusos Alexander Skvortsov y Alexei Ovchinin trabajarán con el robot FEDOR en la EEI, y sus colegas extranjeros los ayudarán.

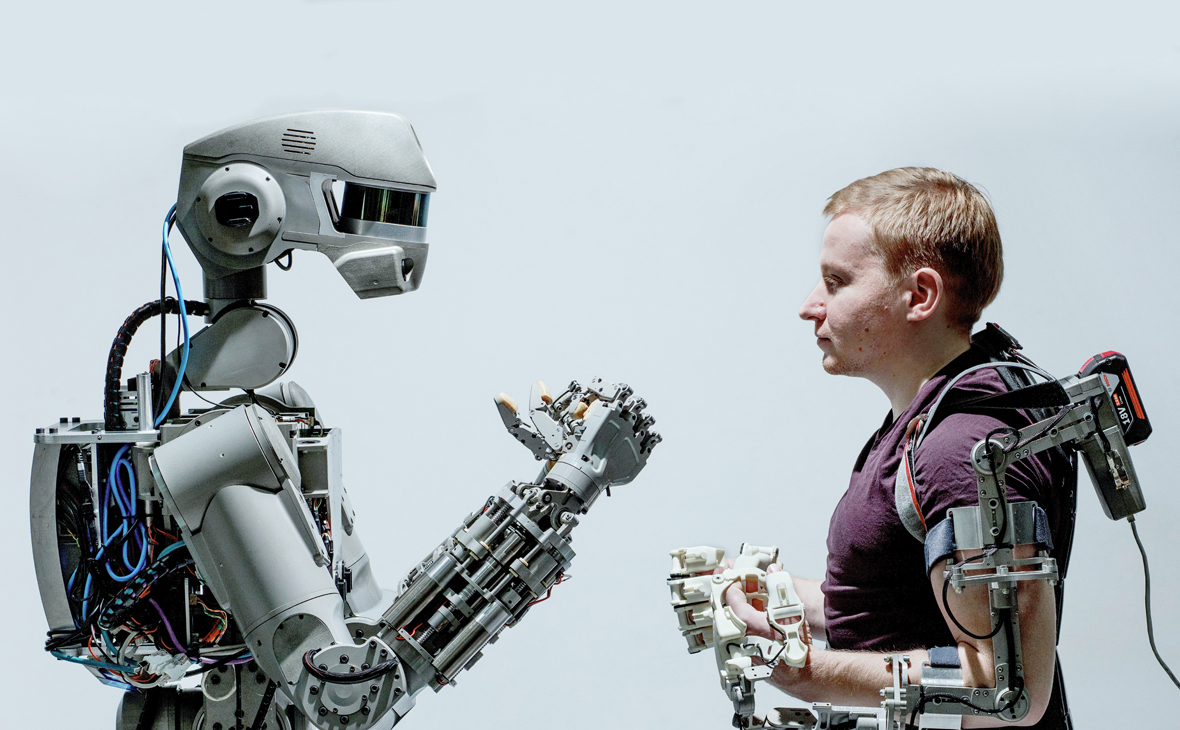
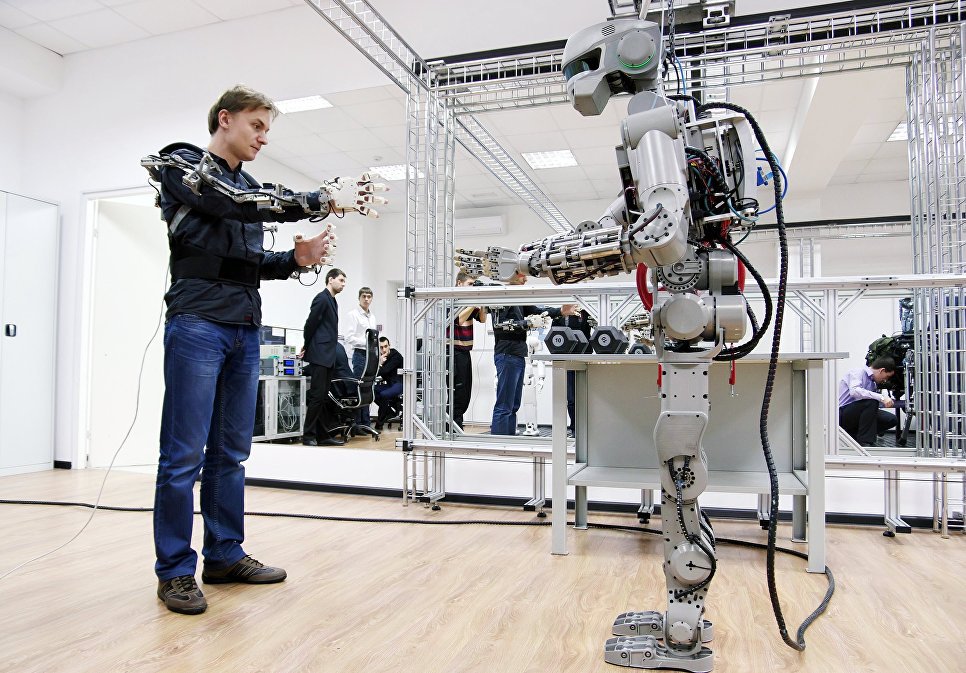
Las primeras sesiones de familiarización de entrenamiento con el sistema de control de robot FEDOR ya se llevaron a cabo en Star City, incluido el estudio de cómo operarlo en gravedad cero.
Con base en los resultados de estos eventos de entrenamiento, la nueva tripulación de la ISS hizo comentarios sobre algunos elementos del robot FEDOR, que serían eliminados por los desarrolladores e ingenieros de Roscosmos y RSC Energia antes del vuelo.
 “Teníamos clases con él, esta tarea apareció de forma inesperada, tuve que resolverla de inmediato. Hay algunos comentarios sobre la preparación, pero estos son comentarios que entienden los astronautas que saben qué es la ingravidez. Estos son algunos matices, estoy seguro de que serán eliminados y espero que el resultado de trabajar con FEDOR sea positivo e interesante, y que el primer panqueque no sea grumoso. Verá esto en nuestra filmación
“Teníamos clases con él, esta tarea apareció de forma inesperada, tuve que resolverla de inmediato. Hay algunos comentarios sobre la preparación, pero estos son comentarios que entienden los astronautas que saben qué es la ingravidez. Estos son algunos matices, estoy seguro de que serán eliminados y espero que el resultado de trabajar con FEDOR sea positivo e interesante, y que el primer panqueque no sea grumoso. Verá esto en nuestra filmación ”, dijo el astronauta Alexander Skvortsov, sin especificar la naturaleza de los comentarios.
El robot FEDOR en la ISS se controlará en modo avatar. Ahora el cosmonauta Alexander Skvortsov solo está entrenando y entrenando para estudiar el uso del robot, aprendiendo a controlar sus movimientos con la ayuda de un traje especial que captura los movimientos humanos y los transfiere a los sensores del robot.
"Resulta que está en modo de avatar", dijo Alexander Skvortsov, respondiendo a la pregunta de si FEDOR será el primer mecanismo de Android en la estación.
“Él (FEDOR) es eficiente, pero mantengamos un poco de intriga. Las tareas que tenía delante disminuyeron, no habrá mucho tiempo. No expresaré las tareas, lo que haré, y él, que hacer conmigo. Es interesante, lo verás todo ", intrigó Aleksanr Skvortsov.
Resulta que la ISS ya ha preparado un lugar para el robot FEDOR, por lo que su despliegue en la estación y su puesta en marcha no llevará mucho tiempo.
Después de atracar, será transferido del barco al segmento ruso de la estación.
El suministro de energía del robot FEDOR durante el vuelo dentro de la nave espacial Soyuz y en la ISS se realizará con baterías externas, y no a través de cables de los sistemas eléctricos de la nave y la estación.
A su vez, el jefe del Centro de Entrenamiento de Cosmonautas (CPC) Pavel Vlasov confirmó que los experimentos principales con el robot FEDOR serán realizados por la tripulación que saldrá para la EEI el 20 de julio de 2019, de acuerdo con el horario de trabajo.
"De lo nuevo, lo que la tripulación evaluará por primera vez, y observaremos la posibilidad del funcionamiento del primer sistema robótico serio como un robot FEDOR ", dijo Pavel Vlasov, hablando sobre las tareas de la próxima expedición a la EEI.
Bajo las condiciones de la ISS, los astronautas evaluarán la exactitud de los cálculos de diseño al crear el robot FEDOR y las perspectivas para la implementación de este proyecto para proporcionar apoyo robótico a la tripulación de la estación ante la posibilidad de vuelos largos.
Sin embargo, hasta ahora no se ha
hablado de que el robot FEDOR ingrese al espacio exterior , pero de hecho es interesante para la astronáutica por esto.
“Comeremos el elefante en partes. En primer lugar, se crea precisamente como soporte para la tripulación en actividades adicionales. Moverse en la superficie de la estación en su tamaño actual con un campo de fútbol no es fácil y rápido. El soporte puede ser elemental: el transporte de algún tipo de herramienta, pero hay muchas aplicaciones posibles ”, dijo Pavel Vlasov.
Ahora estamos trabajando y ajustando el plan de tareas que el robot FEDOR tendrá que realizar.
Anteriormente, ya había indicado la ejecución de doce experimentos, sin embargo, lo más probable es que solo cuatro a seis tareas que el robot FEDOR repita después de que la persona se incluya en el programa final.
Me pregunto si habrá tareas que, junto con los robots del proyecto Astrobee,
que ya están en la ISS , puedan implementarse con FEDOR.
Sobre el vuelo del robot FEDOREl esquema de vuelo de dos días se aplicará cuando se lance la nave espacial Soyuz MS-14 con el vehículo de lanzamiento robot FEDOR Soyuz-2.1a.
El lanzamiento del vehículo de transporte Soyuz MS-14 en el vehículo de lanzamiento Soyuz-2.1a está programado para agosto de 2019.
El vuelo del barco se realizará en modo no tripulado, lo que aumentará la carga útil varias veces debido a la falta de algunos de los instrumentos y ensambles necesarios para garantizar el trabajo de la tripulación.
El barco no tripulado Soyuz MS no es una nueva modificación del barco tripulado. Esta versión del Soyuz MS se distingue del barco serial habitual por el sistema mejorado de control de movimiento y navegación (SUDN) y el refinamiento correspondiente de los sistemas individuales en el aire.
Durante el vuelo, se probará este sistema y se verificará la integración de la nave espacial Soyuz MS-14 con el vehículo de lanzamiento Soyuz 2.1a.
El vehículo de lanzamiento Soyuz-2.1a será reemplazado como un medio para llevar a las personas a la órbita Soyuz-FG con el sistema de control ucraniano. El stock de estos misiles está casi agotado.