En un
artículo anterior sobre diseño orientado a modelos , se demostró que no todas las técnicas son igualmente útiles. Y explica cómo hacerlo bien, para que no sea insoportablemente doloroso. Pero al final del artículo, se planteó la pregunta, provocativa como Sharon Stone fue cuestionada por los investigadores: el diseño orientado al modelo es ciertamente bueno, pero ¿cómo demostrar que el modelo coincide con el objeto? ¿Cuál es tu evidencia?
Todavía se está preparando una respuesta general a esta pregunta, pero puedo darle un ejemplo real y nuevo sobre una en particular en este momento. Resultó en mis manos aquí, como siempre por accidente, el texto del especialista líder en nuestro país sobre accionamiento eléctrico Kalachev Yuri Nikolaevich, autor del libro
Modelado en un accionamiento eléctrico. Instrucciones para entender. junto con su amable permiso para publicar. Este texto aún se está preparando para su publicación en publicaciones especializadas, pero los lectores del Habrir lo verán primero.
Más allá del corte
Kalachev Yu. N., Lantsev V.Yu., Okulov E.V.Motor DC sin escobillas
(práctica de aplicar modelado y generación de código en Aeroelectromash JSC)¡Hurra, camaradas! Sucedió !!!
Finalmente, vimos los frutos de las tendencias progresivas que crecen en la industria de motores domésticos.
El artículo analiza la tecnología de diseño de un accionamiento eléctrico mediante simulación y generación de código. (Diseño correcto orientado al modelo )
En cuanto al modelado, este no es un problema nuevo para nuestros controladores. Pero pocas personas han intentado la generación automática de código del programa controlador de unidades a partir de su modelo, y a escala global ...
Nos atrevemos a afirmar que esta tendencia útil (escritura automática de un programa por otro programa) se desarrollará activamente en el mundo digital futuro ... El que comience antes ganará.
Queremos hacer una reserva para que la generación de código, en nuestra opinión, no cancele y no reemplace al programador, sino que solo lo ayude. En este caso, por supuesto, creemos que el código SI del programa generado debería estar abierto para ello.
Así lo hacemos, el resultado de la generación automática de código es el código C, abierto para su visualización y análisis.
En nuestro caso, el objeto de control era un cierto accionamiento eléctrico con un motor de CC sin escobillas (BDT), cuyo eje está conectado a una caja de engranajes que convierte la rotación en movimiento de traslación de la varilla.
La tarea del accionamiento eléctrico es bastante estándar: posicionar el eje de la varilla, preferiblemente más rápido y con mayor precisión ... A menudo, estos accionamientos se utilizan para controlar los timones de vehículos aéreos no tripulados.
La unidad de control del dispositivo fue diseñada y fabricada en el departamento de accionamiento eléctrico de Aeroelectromash JSC sobre la base del microcontrolador 1986 1986 (PKK Milander JSC). Era necesario crear algoritmos y un programa de control del controlador para su uso posterior en problemas prácticos.
El trabajo fue realizado conjuntamente por especialistas de la empresa de servicios 3V y empleados del departamento de accionamiento eléctrico de Aeroelectromash JSC.
La primera tarea que enfrentó nuestro equipo fue la identificación del objeto de control. Para esto, se llevaron a cabo algunas mediciones de las características del motor, que resultaron ser bastante específicas.
Por ejemplo, el EMF del motor medido tenía una forma muy extraña, como se muestra en la Figura 1. <br?

Figura 1. Motor EMF medido.
Si el lector está familiarizado con el programa Simulink, entonces sabe que allí, en el modelo del motor con constantes e imanes, puede elegir un EMF sinusoidal o trapezoidal.
¿Y a dónde ir con el pobre campesino? ¿Dónde está el seno aquí y dónde está el trapecio? (¡Las herramientas de modelado correctas deben estar abiertas!). En el entorno SimInTech, incluso tales imperfecciones del motor pueden tenerse en cuenta. Hemos configurado la forma EMF que se muestra en la Fig. 2

Figura 2. EMF del motor creado en SimInTech
Encuentre las dos diferencias en la figura 1 y la figura 2. Encontramos una cosa: el color.
La siguiente característica del motor resultó ser su importante momento de diente, debido a la geometría del circuito magnético del estator y la ausencia de biselado de las ranuras de los imanes del rotor. El momento se midió experimentalmente y se introdujo en el modelo. El gráfico del momento del diente se muestra en la figura 3.

Figura 3. Momento del diente.
Además, las pérdidas por magnetización se tuvieron en cuenta en el modelo del motor, que está ausente en los modelos matemáticos de otros desarrolladores de programas de simulación.
Además, el funcionamiento del accionamiento eléctrico se comparó con los resultados de la simulación en los modos de prueba. Abajo en la Fig. Las Figuras 4 y 5 muestran los resultados de una prueba inactiva (frecuencia máxima sin carga).

Figura 4. Ralentí. Motor real.

Figura 5. Corriente de fase inactiva. Resultado de simulación.
Conclusión
Los oscilogramas de ralentí real y modelo coinciden. Visualmente, la diferencia no es visible.
Después de una prueba de ralentí exitosa, se realizó una prueba de impacto dinámico en un motor con una caja de cambios conectada. En este experimento, se aplicó un voltaje constante a los devanados del motor con un reverso a una frecuencia de 30 Hz. En este caso, el enlace de salida oscilaba con la misma frecuencia. La Figura 6 muestra los resultados de este experimento:
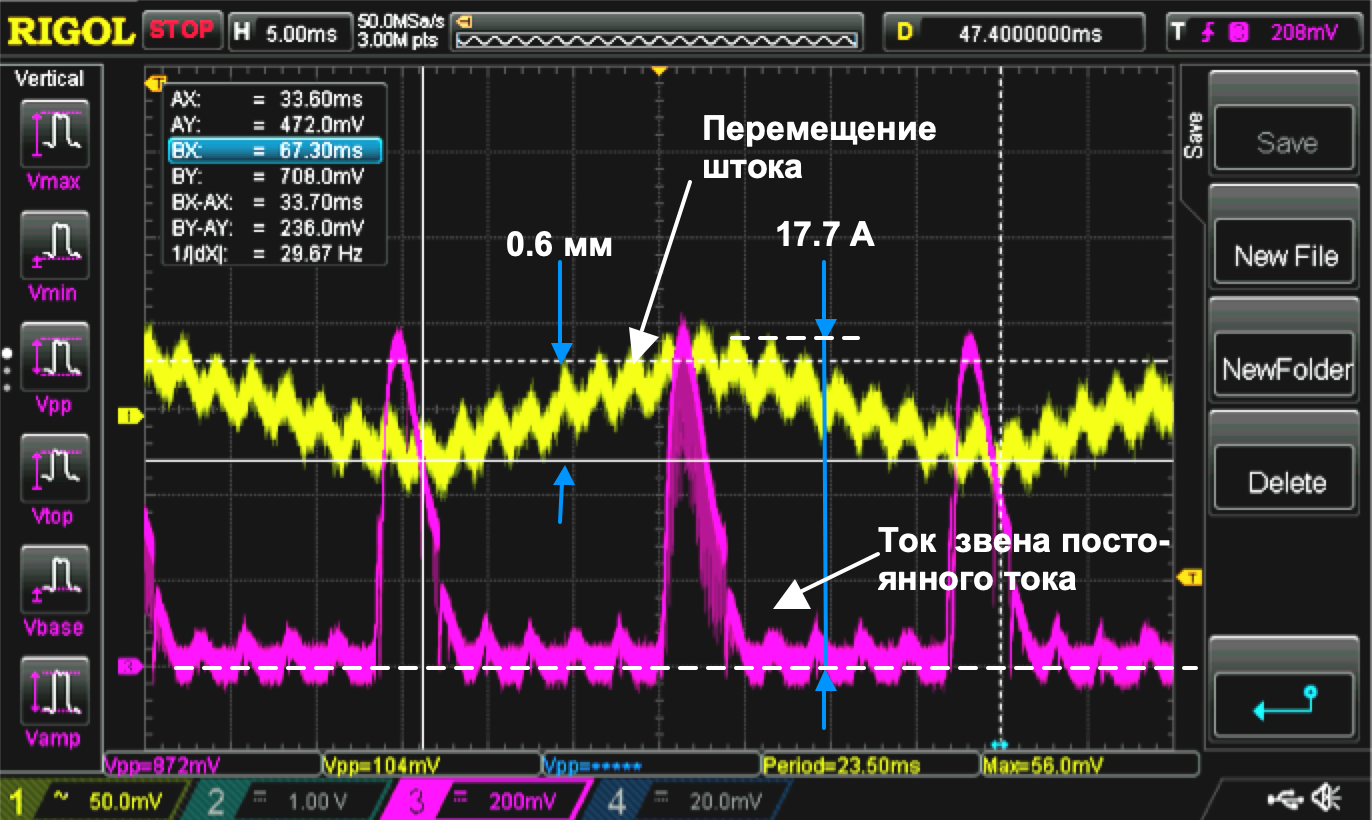
Figura 6. Motor real bajo carga
(Las señales se dispararon con interferencia. La fluctuación de fase de alta frecuencia y el desenfoque son interferencias en las señales de los sensores de posición y corriente).
Los datos obtenidos se compararon con un modelo de accionamiento que funciona en un modo similar (Fig. 7).

Figura 7. Modelo bajo carga
Conclusiones:
- Los movimientos de la barra en la realidad y en el modelo coinciden completamente
- Los valores máximos de la corriente real del motor y el modelo coinciden con una precisión del error de medición.
En la Fig. 8 se muestra el tipo de modelo verificado de las partes mecánicas y de potencia del accionamiento eléctrico construido sobre elementos de biblioteca estándar del programa SimInTech.
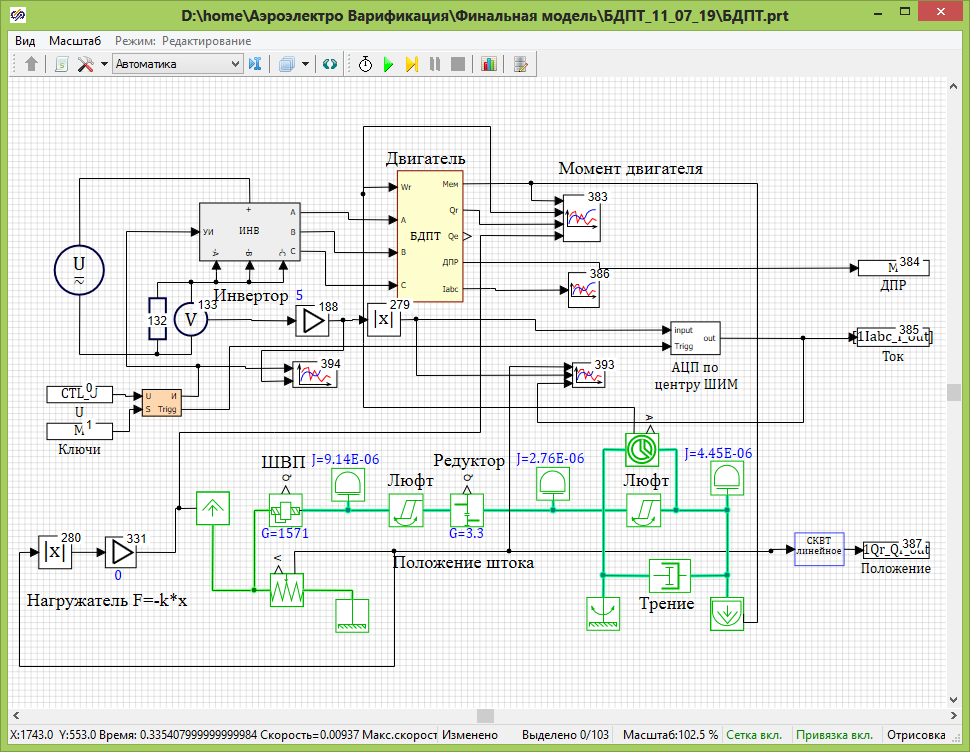 Figura 8. Esquema de un modelo complejo de un accionamiento eléctrico, incluida la parte mecánica.
Figura 8. Esquema de un modelo complejo de un accionamiento eléctrico, incluida la parte mecánica.Se compone de modelos:
- inversor de corriente
- motor con sensor de posición del rotor (DPR)
- transmisión mecánica
- sensor de corriente
- cargador
Después de asegurarse de que el comportamiento del modelo coincide con el comportamiento del producto real, de acuerdo con los resultados de la simulación, puede seleccionar la estructura necesaria del sistema de control (CS) y configurarla para los diferentes tipos de entrada enumerados en la tarea técnica.
En nuestro caso, un buen sistema de control de posición de circuito doble con acoplamiento de amortiguación en la velocidad mostró buenos resultados. Una vista modelo de esta estructura se muestra en la figura 9.
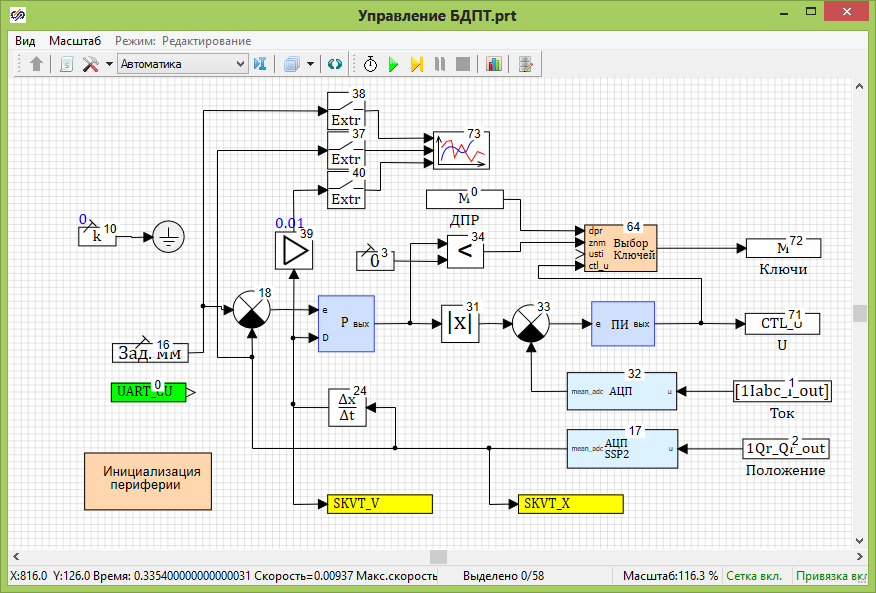
Figura 9. El esquema de diseño del programa de control del variador.
Con el uso adicional de la generación de código, no hay necesidad de codificación manual de los algoritmos del sistema de control: se crea automáticamente un proyecto terminado en el entorno de desarrollo de Keil uVision. Después de ensamblar la imagen binaria del programa, se puede traducir a nuestro procesador (1986BE1T).
Tenga en cuenta que los bloques de modelo "Elección clave", "Inicialización periférica", "ADC", "SSP2 ADC" en el modo de simulación implementan los modelos matemáticos correspondientes y, durante la generación del código, se reemplazan con bibliotecas para trabajar con los periféricos del procesador utilizado.
Después de elegir la estructura del sistema de control y su configuración, tuvimos que:
- llevar a cabo la generación automática de código del programa
- escribir el programa recibido al controlador
- capturar excelentes resultados
De acuerdo con la Fig. 10, puede comparar el funcionamiento del modelo y el disco real. Como referencia de posición, se utilizó una sinusoide con una frecuencia de 3 Hz y una amplitud de 3 mm.
Para obtener datos del controlador, se proporcionó una parte especial en su programa que proporcionaba la lectura de señales internas a través de una interfaz en serie. El usuario, mientras la unidad está funcionando, ve los resultados del firmware en la ventana de SimInTech.

Figura 10. Comparación del modelo y la unidad real.
Bueno, incluso el color es el mismo aquí ...
¡Hurra, camaradas! Sucedió !!!
Todos los que
estén interesados en el tema del accionamiento eléctrico recomiendan descargar el libro gratuito
Kalachev Yu.N. Modelado en el accionamiento eléctrico.