Publicaciones en la serie:
8. Controlamos desde el control del teléfono ROS, nodo GPS7. Localización de robots: gmapping, AMCL, puntos de referencia en el mapa de la sala6. Odometría con codificadores de rueda, mapa de habitación, lidar5. Trabajamos en rviz y gazebo: xacro, nuevos sensores.4. Cree una simulación de robot utilizando los editores rviz y gazebo.3. Acelera, cambia la cámara, arregla la marcha2. Software1. hierroAl comenzar a estudiar ROS (sistema de operación robótica), primero se sorprende de cómo "todo es complicado", por la cantidad de información sobre temas, nodos, acciones, su cabeza está girando. Y, el primer deseo es volver a administrar el robot con los buenos y viejos scripts. Pero no Todo hombre adulto debería recolectar algo menos para un hombre que conduciría, parpadearía y chirriaría. ROS fue elegida como plataforma, ya que sigue siendo el siguiente paso en el desarrollo de robots en el mundo del arduino sin alma. Se propone ensamblar el "carro" ROS, que no solo será barato, sino también funcional: puede andar en línea en el piso, con su gato, con su cuerpo :) Los primeros pasos serán:
Algunas letras más
Lo segundo que llama la atención al estudiar ROS es el costo de las plataformas en el mercado. Un conjunto de hamburguesas de tortuga (
como una de las asequibles ) - $ 549 (34,500 p.). Todo lo demás es aún más caro. Aquí se puede argumentar que la mayor parte del precio es lidar, un dispositivo para determinar la posición del robot en el espacio. Que en sí se encuentra por debajo de 15k p. Sin embargo, todos los demás componentes tampoco son baratos.
Calculemos cuánto nos costará nuestro "carrito":
Total: 8000 p.
El precio también es alto, pero es un orden de magnitud más barato que las tortugas. Si lo desea, los automóviles se pueden imprimir en una impresora 3D o tomar un trozo de madera contrachapada. Entonces solo queda tomar motores DC. La batería de frambuesa también se puede reemplazar con un análogo más barato, lo principal es que emite 5V 3A.
RecogemosEl proyecto se basó en un proyecto previamente existente:
www.rosbots.com/build_it , pero con modificaciones significativas. Además, el proyecto básico, a juzgar por la información del sitio, fue abandonado, por lo que debe tener todo en mente.
El comienzo del montaje y montaje de motores es similar a las instrucciones anteriores:
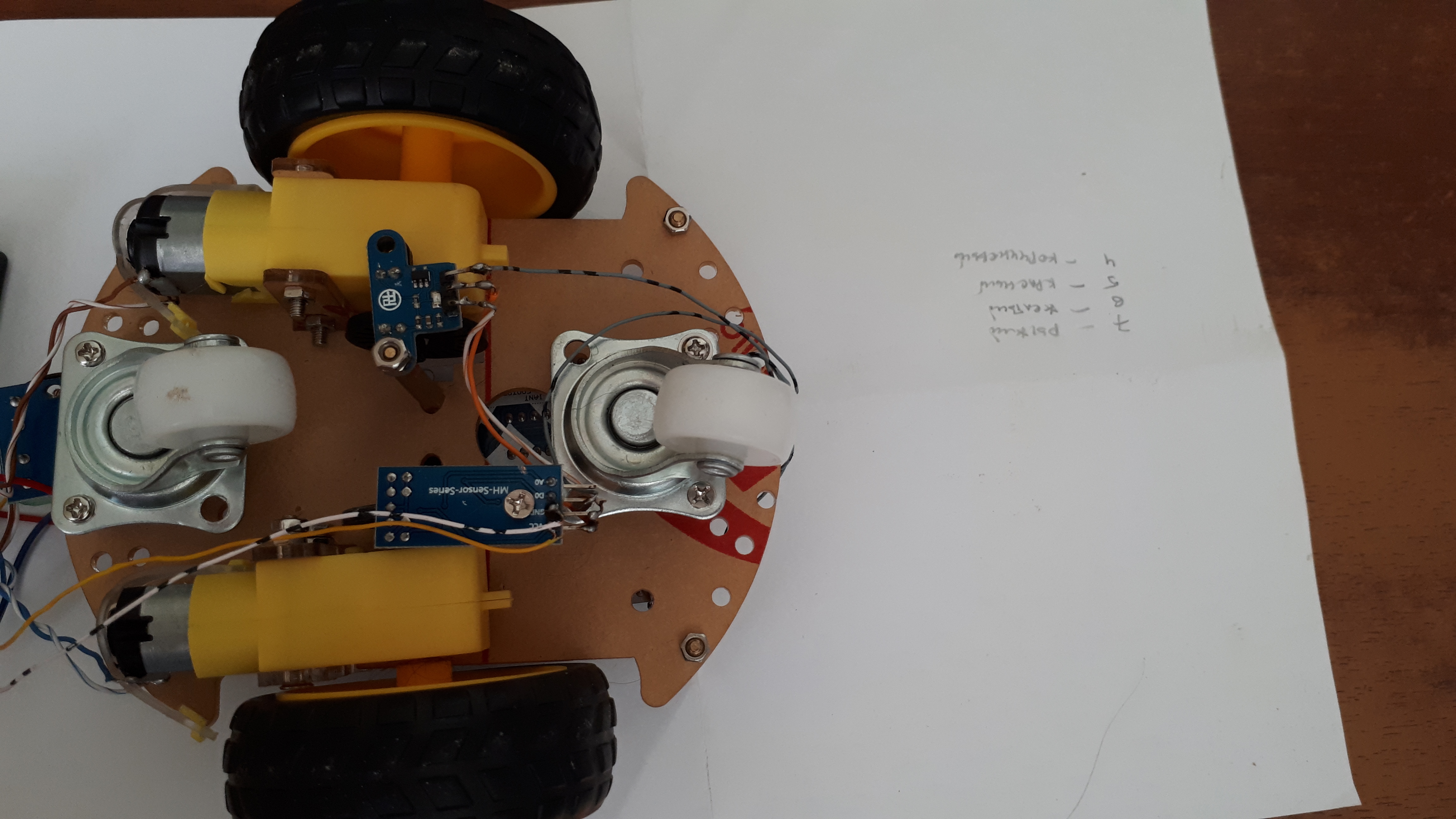
Aquí debe prestar atención a los codificadores, que están montados de tal manera que "cubren" los discos con ranuras, equipados con motores:
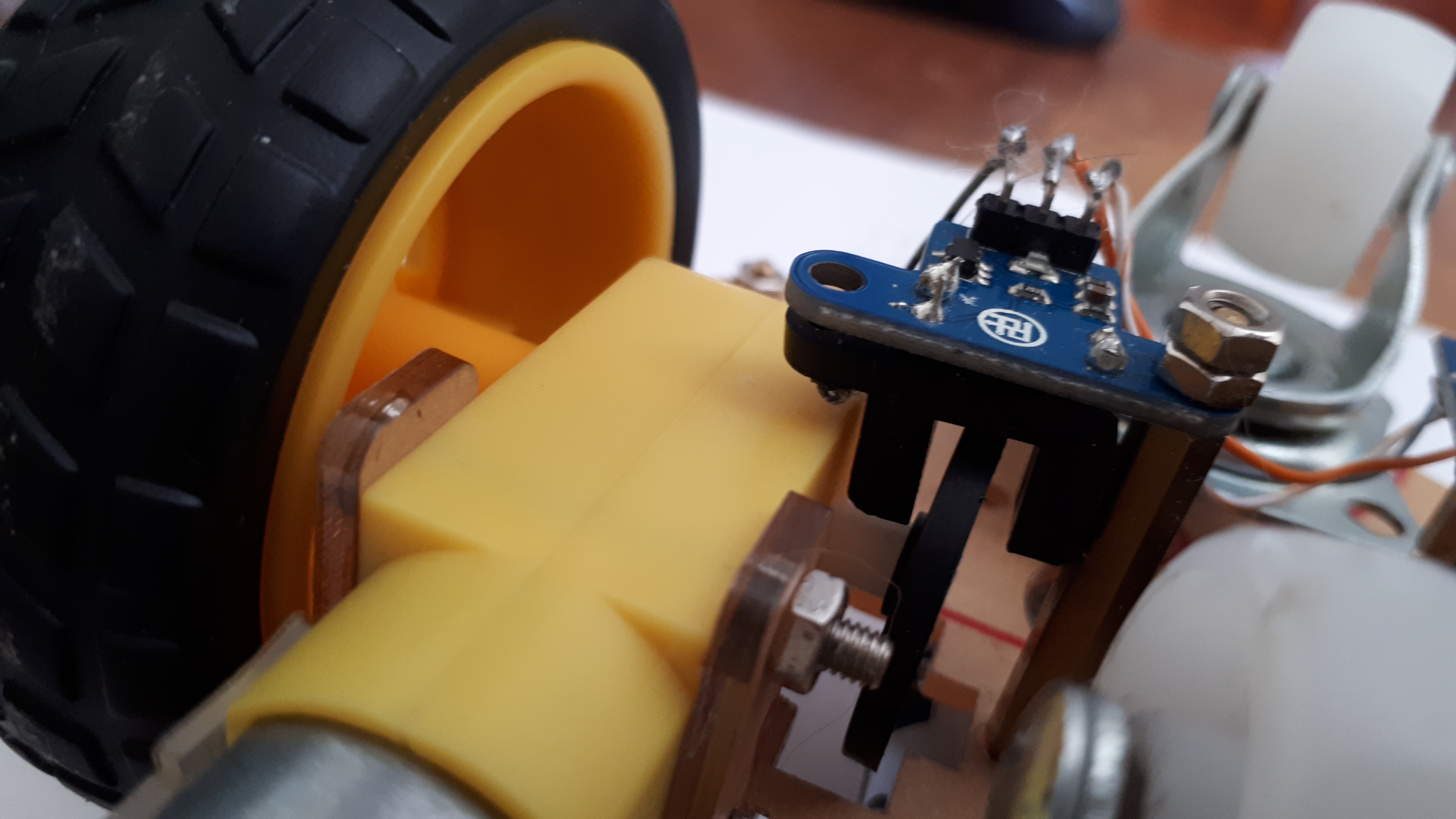
* En general, los codificadores no son muy útiles y no puedes montarlos. Los codificadores ópticos le permiten determinar la distancia recorrida, pero desafortunadamente, no le permiten determinar la dirección del movimiento.
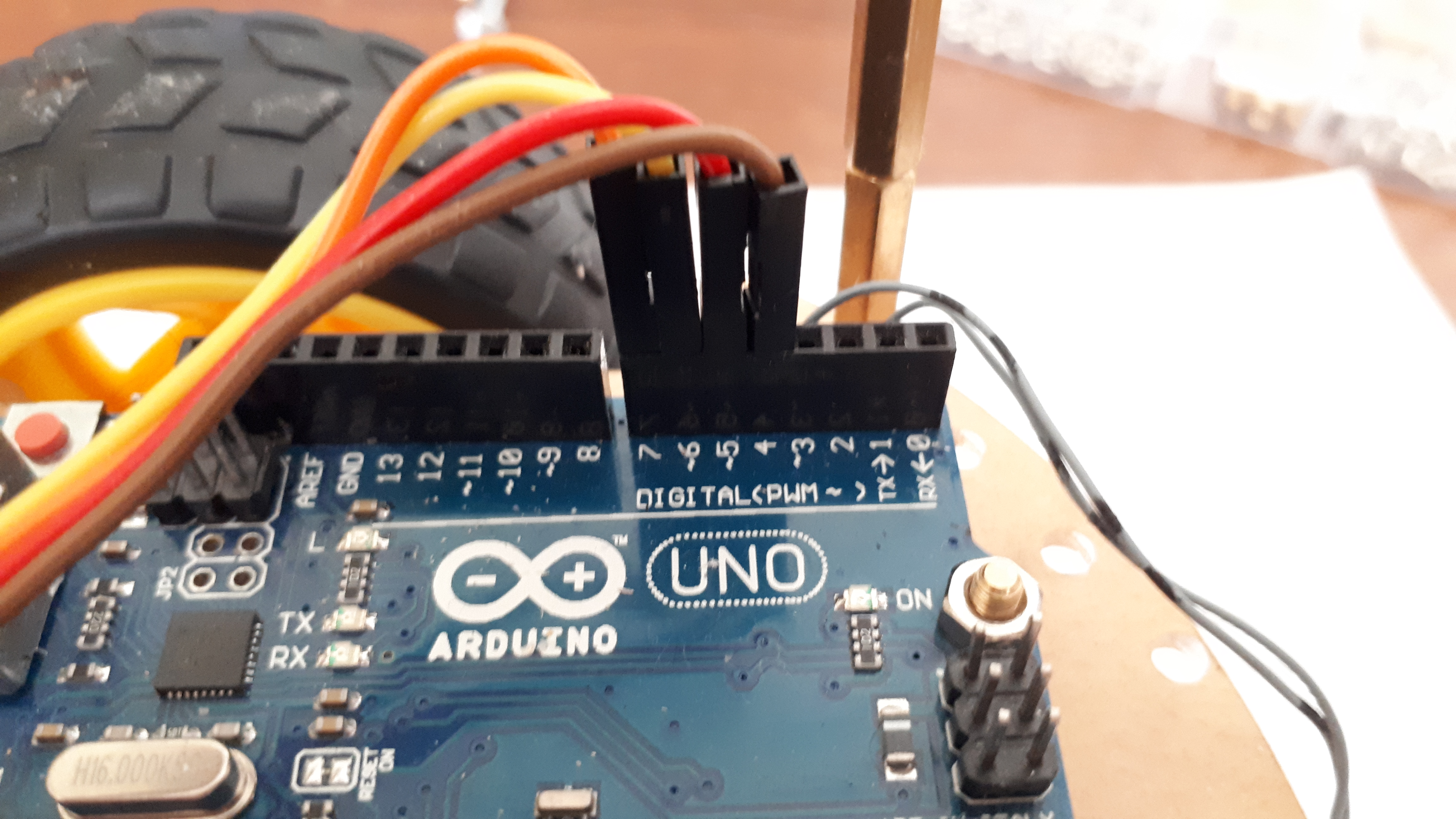
Después de montar los motores y codificadores (opcional), conectamos los cables con el uno arduino, el controlador del motor, el compartimento de las baterías de 2 18650. El diagrama de conexión es similar al publicado en el sitio web del proyecto base con una excepción:

Se pueden tomar 5V para codificadores con arduino (VCC desde el sensor de velocidad derecho y el sensor de velocidad izquierdo a 5V arduino).
Arreglamos el arduino y el controlador del motor, potencia para el controlador:

Fideos más cerca:
Conductor del motor. Los terminales verdes contienen pares de cables de los motores:

Arduino no funcionará con baterías, sino que se conectará a través de USB a frambuesa.
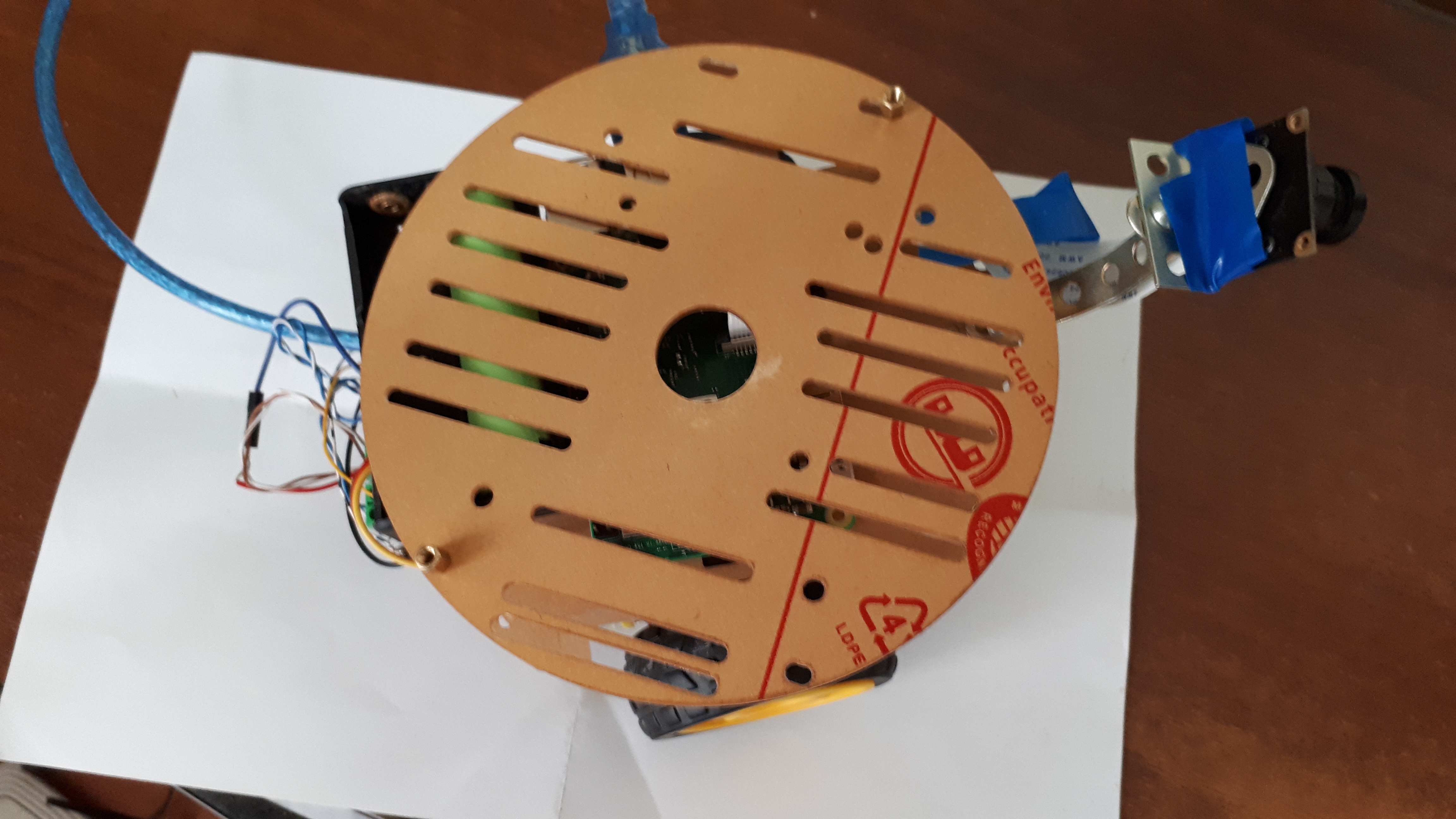
Ponemos la segunda capa de la maquina
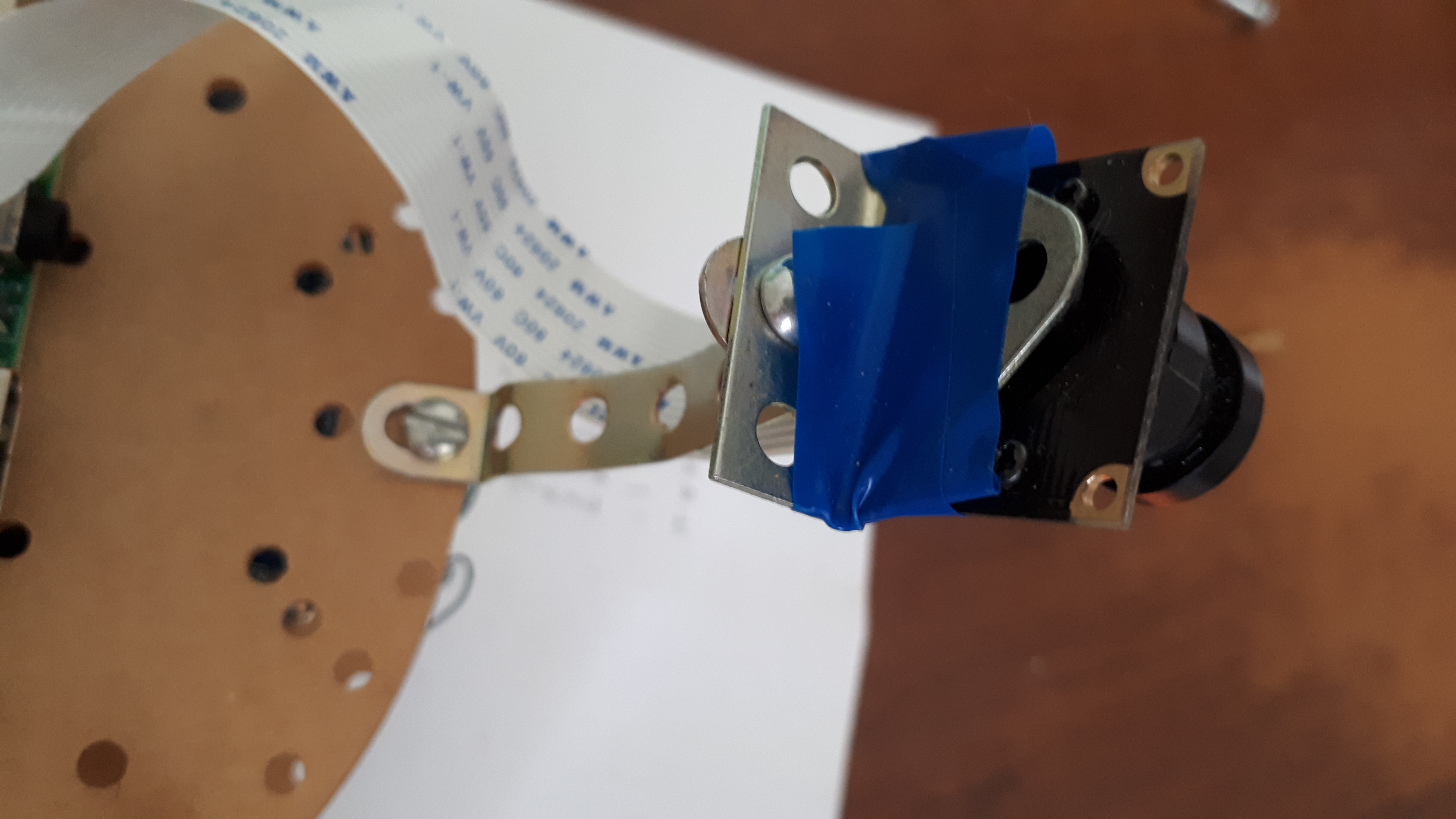
Aquí se ubicará el compartimento de la batería, la frambuesa pi, la cámara en los detalles del diseñador soviético:
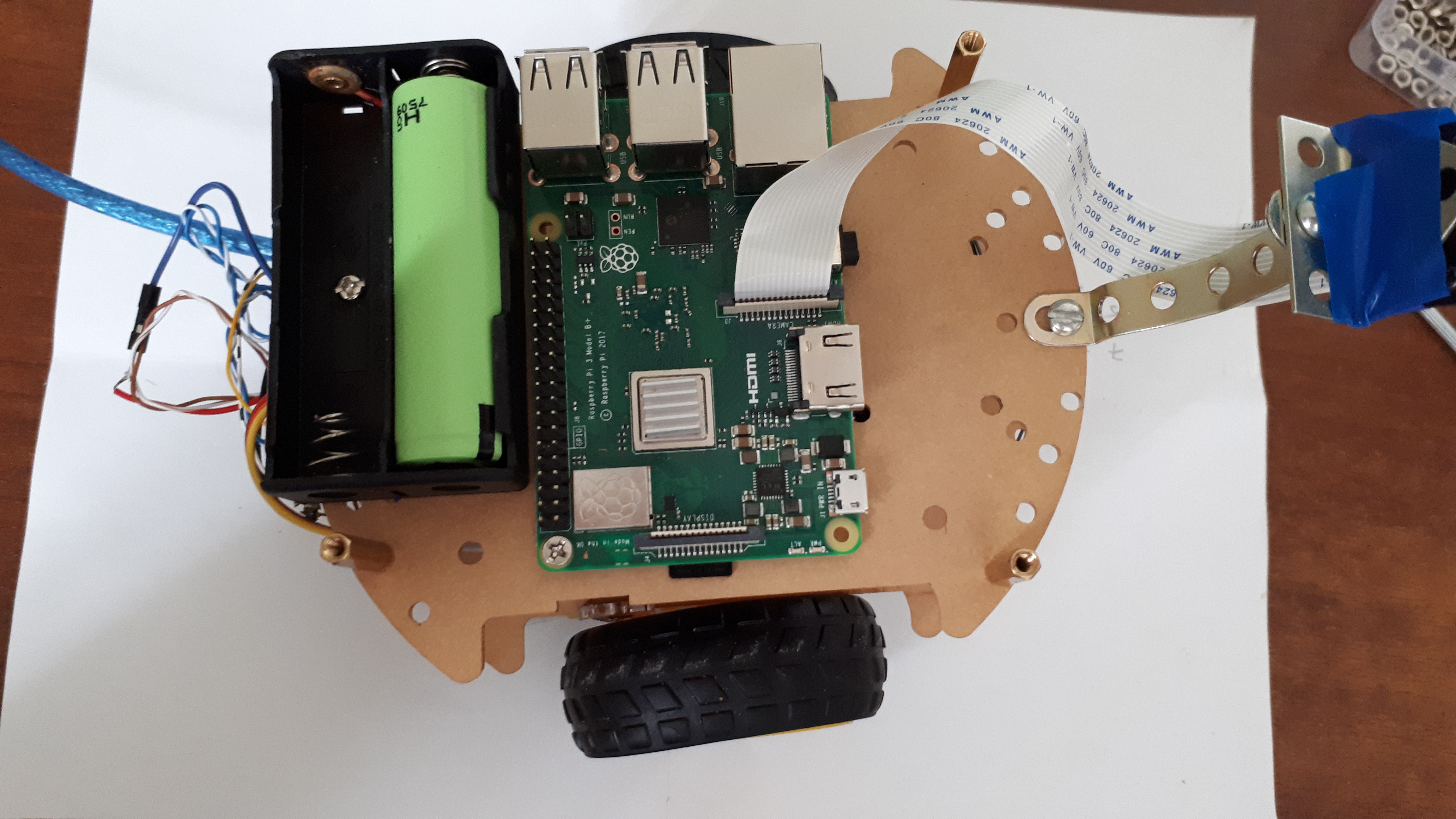
No olvides enchufar correctamente el cable de la cámara a la frambuesa:

Diseñador soviético en:
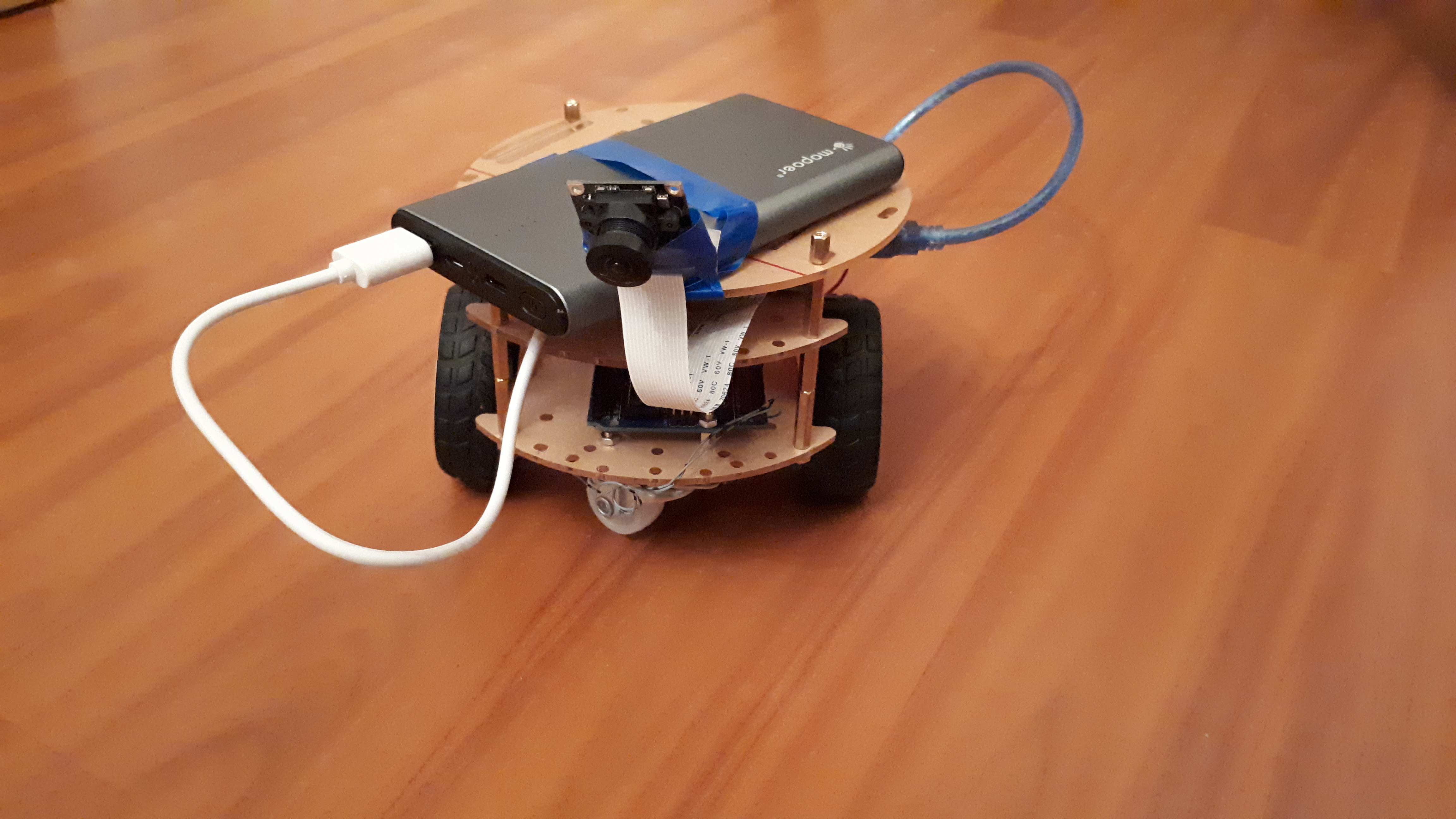
 Cierre la hamburguesa, la tercera capa del "carro"
Cierre la hamburguesa, la tercera capa del "carro" .
Aquí conducirá un powerbank para frambuesa:

* Un poco sobre powerbank para alimentar la frambuesa pi:
:
¡Todo, el auto está listo!
En las siguientes publicaciones hablaremos directamente sobre ROS, líneas, cuerpo, gatos y sonrisas.
Consejos y críticas despiadadas son bienvenidos!
* El diagrama de cableado se actualiza.