 Nota 16 de julio de 2019 Elon Musk presentó la tecnología, que fue uno de los primeros intentos serios de introducir neurointerfaces en la práctica clínica y tener objetivos transhumanos reales a largo plazo. Este artículo es una traducción, con algunas notas, del artículo original que describe la tecnología de la interfaz del neuroordenador, un enlace al cual también se publica en el sitio web de la compañía desarrolladora Neuralink . El artículo describe las características y características de los principales módulos subyacentes a esta tecnología, que incluyen: microelectrodos biocompatibles flexibles, un manipulador neuroquirúrgico robótico para introducir electrodos en el cerebro, así como microelectrónica especializada que proporciona recepción, amplificación y digitalización de la señal de la actividad neuronal.
Nota 16 de julio de 2019 Elon Musk presentó la tecnología, que fue uno de los primeros intentos serios de introducir neurointerfaces en la práctica clínica y tener objetivos transhumanos reales a largo plazo. Este artículo es una traducción, con algunas notas, del artículo original que describe la tecnología de la interfaz del neuroordenador, un enlace al cual también se publica en el sitio web de la compañía desarrolladora Neuralink . El artículo describe las características y características de los principales módulos subyacentes a esta tecnología, que incluyen: microelectrodos biocompatibles flexibles, un manipulador neuroquirúrgico robótico para introducir electrodos en el cerebro, así como microelectrónica especializada que proporciona recepción, amplificación y digitalización de la señal de la actividad neuronal.Anotación
Las interfaces de neurocomputadora (IMC - interfaz cerebro-máquina) brindan la oportunidad de restaurar la función sensorial y motora, así como el tratamiento de trastornos neurológicos, pero hasta ahora el IMC aún no ha recibido una amplia distribución clínica, en parte debido al número insuficiente de canales que limitaron su potencial. En este informe, describimos los primeros pasos de Neuralink hacia un sistema de banda ancha IMC escalable. Creamos conjuntos de "hilos" pequeños y flexibles: electrodos, en los que se distribuyen hasta 3072 electrodos en 96 hilos. También creamos un robot neuroquirúrgico capaz de implantar seis hebras (192 electrodos) por minuto. Cada hilo se puede insertar individualmente en el cerebro con una precisión de micras para evitar daños en la red vascular superficial y lograr un objetivo en un área del cerebro definida con precisión. El conjunto de electrodos está empaquetado en un pequeño dispositivo implantable que contiene microcircuitos especiales para la amplificación integrada de baja potencia y la digitalización de la señal: el paquete para 3072 canales tiene unas dimensiones de 23 × 18.5 × 2 mm y un volumen de 0.851 cm3. Un cable USB-C permite la transmisión de datos desde un dispositivo con ancho de banda completo y grabación simultánea desde todos los canales. Hasta el 85.5% de los electrodos implantados registraron directamente picos de actividad neuronal. El enfoque de Neuralink para el IMC tiene una densidad y escalabilidad de electrodos sin precedentes, lo que permite el uso clínico en el ensamblaje.
1. Introducción
La interfaz cerebro-máquina (IMC) puede ayudar a las personas con una amplia gama de trastornos clínicos. Por ejemplo, los investigadores han demostrado la capacidad de controlar usando cursores informáticos de neuroprótesis [1, 2, 3], extremidades robóticas [4, 5] y sintetizadores de voz [6] utilizando, en todos estos ejemplos, no más de 256 electrodos. Si bien estos avances sugieren que es posible la transferencia de información de alta precisión entre el cerebro y las máquinas, el desarrollo del IMC se vio gravemente limitado por la incapacidad de registrar señales de una gran cantidad de neuronas. Los enfoques no invasivos pueden registrar un promedio de millones de neuronas a través del cráneo, pero esta señal está distorsionada y no es específica [7, 8]. Los electrodos invasivos ubicados en la superficie de la corteza pueden registrar señales útiles, pero están limitados porque promedian la actividad de miles de neuronas y no pueden registrar señales profundas en el cerebro [9]. La mayoría de los IMC utilizan métodos invasivos porque la lectura más precisa de las representaciones neurales requiere el registro de potenciales de acción de neuronas individuales en conjuntos distribuidos y funcionalmente relacionados [10].
Los microelectrodos son el estándar de oro de la tecnología para registrar potenciales de acción, pero hasta ahora no ha habido una tecnología de microelectrodos clínicamente desarrollada que pueda escalarse para registrar la actividad de una gran cantidad de neuronas [11]. Esto requerirá un sistema creado a partir de materiales con propiedades especiales que brinden una alta biocompatibilidad, seguridad y durabilidad. Además, este dispositivo también requerirá un enfoque quirúrgico práctico y equipos electrónicos de baja potencia y alta densidad para proporcionar un rendimiento de implante totalmente inalámbrico.
La mayoría de los dispositivos para el registro neuronal a largo plazo son conjuntos de electrodos hechos de metales duros o semiconductores [12, 13, 14, 15, 16, 17, 18]. Si bien las rejillas metálicas rígidas facilitan la penetración en el cerebro, el tamaño, el módulo de Young y la falta de coincidencia en la rigidez a la flexión entre las sondas rígidas y el tejido cerebral pueden estimular respuestas inmunes que limitan la función y la durabilidad de estos dispositivos [19, 11]. Además, la geometría fija de estas matrices limita las poblaciones de neuronas a las que se puede acceder, especialmente debido a la presencia de la vasculatura.
Un enfoque alternativo es utilizar sondas poliméricas flexibles de electrodos múltiples delgadas [20, 21]. El tamaño más pequeño y la mayor flexibilidad de estas sondas deberían proporcionar una mayor biocompatibilidad. Sin embargo, el inconveniente de este enfoque es que las sondas de polímero delgadas no son lo suficientemente rígidas como para insertarse directamente en el cerebro; su introducción debe proporcionarse con refuerzos [22, 21], inyección [23, 24] u otros enfoques [25], y todos ellos son bastante lentos [26, 27]. Con el fin de satisfacer los requisitos funcionales para los NQI de gran ancho de banda, aprovechando los dispositivos de película delgada, hemos desarrollado un enfoque robótico en el que una gran cantidad de sondas de polímero delgadas y flexibles se insertan de manera efectiva e independiente en varias regiones del cerebro [28].
Aquí informamos sobre el progreso de Neuralink en la creación de un IMC flexible y escalable, que aumenta el número de canales en un orden de magnitud en comparación con el trabajo anterior. Nuestro sistema consta de tres componentes principales: sondas de polímero ultradelgado (sección 2 de este informe), un robot neuroquirúrgico (sección 3) y electrónica especializada de alta densidad (sección 4). Demostramos tecnología que permite la rápida implantación de 96 filamentos de polímero, cada uno de los cuales contiene 32 electrodos, para un total de 3072 electrodos.
Hemos desarrollado una electrónica especializada en miniatura, que nos permite transmitir simultáneamente todos los datos de electrofisiología de banda ancha de todos estos electrodos (sección 5). Empaquetamos este sistema de manera que permitiera su implantación a largo plazo y desarrollamos un software especial para la detección en línea de los picos de actividad de las neuronas, que pueden detectar potenciales de acción de baja latencia. Juntos, este sistema sirve como una plataforma de investigación moderna y el primer prototipo de una interfaz de neurocomputadora humana totalmente implantable.
2. Hilos
 Figura 1
Figura 1 : Nuestras nuevas sondas de polímeros (hilos). A. Sonda de borde lineal, con 32 contactos de electrodo separados 50 micras. B. Una sonda "en forma de árbol" con 32 contactos de electrodo separados 75 micras. C. Imagen más grande de los electrodos individuales para la estructura A, enfatizando su pequeña área de superficie geométrica. D. Distribución de impedancia de electrodos (medida a 1 kHz) para dos tratamientos de superficie: PEDOT (n = 257) e IrOx (n = 588).
Hemos desarrollado un proceso individual para la fabricación de sondas neurales con una distancia mínima entre los electrodos, que utilizan una variedad de materiales de película delgada biocompatibles. El sustrato principal y el dieléctrico utilizado en estas sondas es la poliimida, que cubre una delgada película de oro. Cada matriz de película delgada consiste en una región de "filamento", que tiene contactos, pistas de electrodos y una región de "sensor", donde una película delgada está conectada a microcircuitos no estándar que proporcionan amplificación y recepción de señal. El proceso de microproducción a nivel de oblea asegura su alta productividad. Cada placa está recubierta con diez dispositivos de película delgada que reciben una señal de un total de 3072 contactos de electrodos.
48 o 96 hilos están conectados a cada matriz, cada uno de los cuales a su vez contiene 32 electrodos independientes. Los circuitos integrados se conectan a los contactos en el área del sensor de película delgada utilizando el proceso de unión de chip flip (nota: https: //en.wikipedia.org/wiki/Flip_chip).
Uno de los objetivos de este enfoque es lograr el área de sección transversal más pequeña posible del hilo para minimizar el desplazamiento de tejido en el cerebro. Para lograr esto, mientras se mantiene un alto número de canales, se utilizan litografías de proyección paso a paso y otros métodos de microprocesamiento para obtener una película metálica con resolución submicrométrica.
Hemos diseñado y fabricado más de 20 tipos diferentes de filamentos y electrodos para nuestros conjuntos; Se muestran dos ejemplos de construcción en los paneles A y B de la fig. 1. Hicimos filamentos con un ancho de 5 a 50 micras, que incluyen ubicaciones de grabación de varias geometrías (Fig. 1). El grosor del hilo es de 4 a 6 micras, que incluye hasta tres capas de aislamiento y dos capas de conductor. La longitud típica del hilo es de unos 20 mm. Antes de la inserción, se aplica parylene-C a los hilos para formar una película en la que los hilos permanecen unidos hasta que el robot quirúrgico los retira. Cada hilo termina con un bucle (16 × 50) μm2 para acomodar el enhebrado de la aguja.
Dado que las secciones individuales del electrodo de oro tienen pequeñas áreas de superficie geométrica (Fig. 1C), utilizamos modificaciones de la superficie para reducir la impedancia para la electrofisiología y aumentar la capacidad de carga efectiva de la superficie (Fig. 1D). Dos de estos tratamientos que utilizamos fueron polietilendioxitiofeno polimérico conductor de la electricidad dopado con sulfonato de poliestireno (PEDOT: PSS) [29, 30] y óxido de iridio (IrOx) [31, 32]. En las pruebas de banco, logramos impedancias de 36.97 ± 4.68 kOhm (n = 257 electrodos) y 56.46 ± 7.10 kOhm (n = 588) para PEDOT: PSS e IrOx, respectivamente. La menor impedancia de PEDOT: PSS es prometedora, pero la estabilidad a largo plazo y la biocompatibilidad de PEDOT: PSS son menos confiables que para IrOx. Estos métodos y procesos pueden mejorarse y extenderse aún más a otros tipos de materiales y recubrimientos de electrodos conductores.
3. robot neuroquirúrgico
 Figura 2 : Tamaño del cartucho del cartucho de pinza de aguja (NPC) en comparación con una moneda de un centavo.
Figura 2 : Tamaño del cartucho del cartucho de pinza de aguja (NPC) en comparación con una moneda de un centavo.Los polímeros de película delgada se usaron previamente para sondas de electrodos [21], pero su baja rigidez a la flexión complicaba el proceso de inserción. Neuralink ha desarrollado un enfoque con inserción robótica de sondas flexibles [28], que permite la inserción rápida y confiable de una gran cantidad de sondas de polímeros destinadas a prevenir el daño a la vasculatura y las grabaciones de pequeñas áreas del cerebro. El cabezal de inyección del robot se coloca con una precisión de 10 micras en una plataforma de tres ejes que mide 400 mm × 400 mm × 150 mm y contiene un pequeño conjunto de "porta-agujas" rápidamente reemplazable (Fig. 2, Fig. 3A).
La aguja se muele a partir de un alambre de tungsteno-renio con un diámetro de 40 μm y, mediante grabado electroquímico, su diámetro se reduce a 24 μm a lo largo de la longitud introducida (Fig. 2A). La punta de la aguja está diseñada para enganchar los bucles para la inserción, para transportar e insertar hilos individuales, y para penetrar en las meninges y el tejido cerebral. La aguja es accionada por un motor lineal, que proporciona una velocidad de entrada variable y una aceleración rápida de retracción (hasta 30,000 mm s −2) para facilitar la separación de la sonda y la aguja. La pinza es un alambre de tungsteno con un diámetro de 50 μm, doblado en la punta y con un accionamiento tanto en dirección axial como rotacional (Fig. 2B). Sirve como soporte para las sondas durante el transporte y como guía para garantizar que los hilos se inserten a lo largo del recorrido de la aguja. La Figura 4 muestra una secuencia de fotografías del proceso de inserción de hebras en una simulación de tejido cerebral en agarosa.
 Figura 3
Figura 3 : dispositivo robótico para introducir electrodos; En el recuadro se muestra una vista ampliada del cabezal de entrada. A. Porta agujas cargado. B. Sensor de contacto de la posición cerebral de bajo impacto. C. Módulos de luz con varias longitudes de onda independientes. D. Motor de aguja. E. Una de las cuatro cámaras que enfoca la aguja durante la inserción. F. Cámara con un amplio ángulo de visión del campo quirúrgico. G. Cámaras estereoscópicas.
La cabeza del dispositivo robótico para introducir hilos también tiene una pila de cámaras para recibir imágenes (Fig. 3E-G), que se utilizan para guiar la aguja hacia el bucle del hilo, apuntar antes de ingresar, ver la entrada en tiempo real y verificar. Además, la cabeza del dispositivo contiene seis módulos de luz independientes, cada uno de los cuales es capaz de iluminar independientemente con una longitud de onda de 405 nm, 525 nm y 650 nm o luz blanca (Fig. 3C). La iluminación de 405 nm excita la fluorescencia de la poliimida y permite que la pila óptica y la visión por computadora localicen de manera confiable el bucle de filamento (16 × 50) μm2 y realicen un servocontrol visual submicrométrico para dirigir la aguja iluminada por una luz de 650 nm a través del bucle. Las cámaras estereoscópicas, los cálculos monoculares de software con una profundidad de campo extendida y la iluminación con luz de 525 nm permiten evaluar con precisión la ubicación de una porción de la superficie de la corteza cerebral.
El robot registra ubicaciones en una cuadrícula de coordenadas común en el cráneo, que, combinado con el seguimiento de profundidad, apunta con precisión las estructuras cerebrales anatómicamente definidas. Un paquete de software personalizado integrado le permite preseleccionar todos los puntos de inserción, lo que le permite planificar la ruta de inserción, minimizar la confusión y la carga en cada hilo. Una de las principales funciones de planificación es la capacidad de evitar daños a la red vascular durante la inserción, que es una de las principales ventajas de introducir los electrodos por separado. Esto es especialmente importante porque se cree que el daño a la barrera hematoencefálica desempeña un papel clave en la respuesta inflamatoria del cerebro a objetos extraños [33].
El robot tiene un modo de inserción automática, que le permite insertar hasta 6 hilos (192 electrodos) por minuto. A pesar de que todo el procedimiento de inyección puede automatizarse, el cirujano retiene el control total y, si lo desea, puede realizar un microajuste manual de la posición del hilo antes de cada introducción en la corteza. El robot neuroquirúrgico es compatible con una carcasa estéril y tiene características que facilitan las inyecciones exitosas y rápidas, como la esterilización automática con aguja ultrasónica. El cartucho del soporte de la aguja (NPC; Figura 2C) es la parte del cabezal de inserción que está en contacto directo con el tejido cerebral y es un elemento consumible que se puede reemplazar durante la cirugía en menos de un minuto.
 Figura 4
Figura 4 : 1. Un dispositivo de entrada con un hilo que se acerca a la simulación del tejido cerebral. yo. aguja y cánula (nota: aguja hueca). ii. hilo previamente insertado. 2. El inserto toca la superficie simulando el tejido cerebral. 3. La aguja penetra la tela de imitación, entregando el hilo a una profundidad predeterminada. iii) inserción de hilo. 4. El dispositivo de entrada de hilo sale, dejando el hilo en la tela. iv. hilo implantado
Usando este sistema, demostramos el éxito de la administración en 87.1 ± 12.6% de los casos (media ± desviación estándar), después de 19 operaciones. Durante el estudio, se realizaron ajustes manuales precisos para evitar daños a la microvasculatura de los canales en la superficie de la corteza, lo que aumentó el tiempo total de administración del más rápido. Incluso teniendo en cuenta estas correcciones, el tiempo total de administración para este estudio promedió ~ 45 minutos, con una tasa aproximada de introducción de 29,6 electrodos por minuto (Fig. 6). La introducción se realizó con una craneotomía bilateral de sitios con un área de (4 × 7) mm2 con un intervalo> 300 μm entre filamentos para maximizar la cobertura cortical. Esto demuestra que la inserción robótica de electrodos de polímero delgados es un enfoque eficaz y escalable para registrar la actividad de un gran número de neuronas en áreas del cerebro definidas anatómicamente.
4. Electrónica
La grabación continua de señales de miles de electrodos presenta problemas importantes con la electrónica y el embalaje. La densidad de los canales de grabación requiere la colocación del módulo de amplificación y la digitalización de la señal en el ensamblaje del dispositivo, de lo contrario, los requisitos para el cable y el conector serán excesivamente altos. Este módulo de grabación debe amplificar señales neuronales débiles (<10 μVRMS), al mismo tiempo suprimir el ruido fuera de banda, muestrear y digitalizar señales amplificadas y emitir los resultados para el procesamiento en tiempo real, todo utilizando la potencia y el tamaño más pequeños posibles.
La electrónica se basa en nuestro circuito integrado especializado (ASIC) para aplicaciones Neuralink, que consta de 256 amplificadores programables individualmente ("píxeles analógicos"), convertidores analógicos a digitales (ADC) incorporados y un circuito de control periférico para serializar señales de salida digitalizadas.
El píxel analógico es fácilmente ajustable: las propiedades de ganancia y filtro pueden calibrarse para tener en cuenta los cambios en la calidad de la señal debido a la variabilidad del proceso y el entorno electrofisiológico.
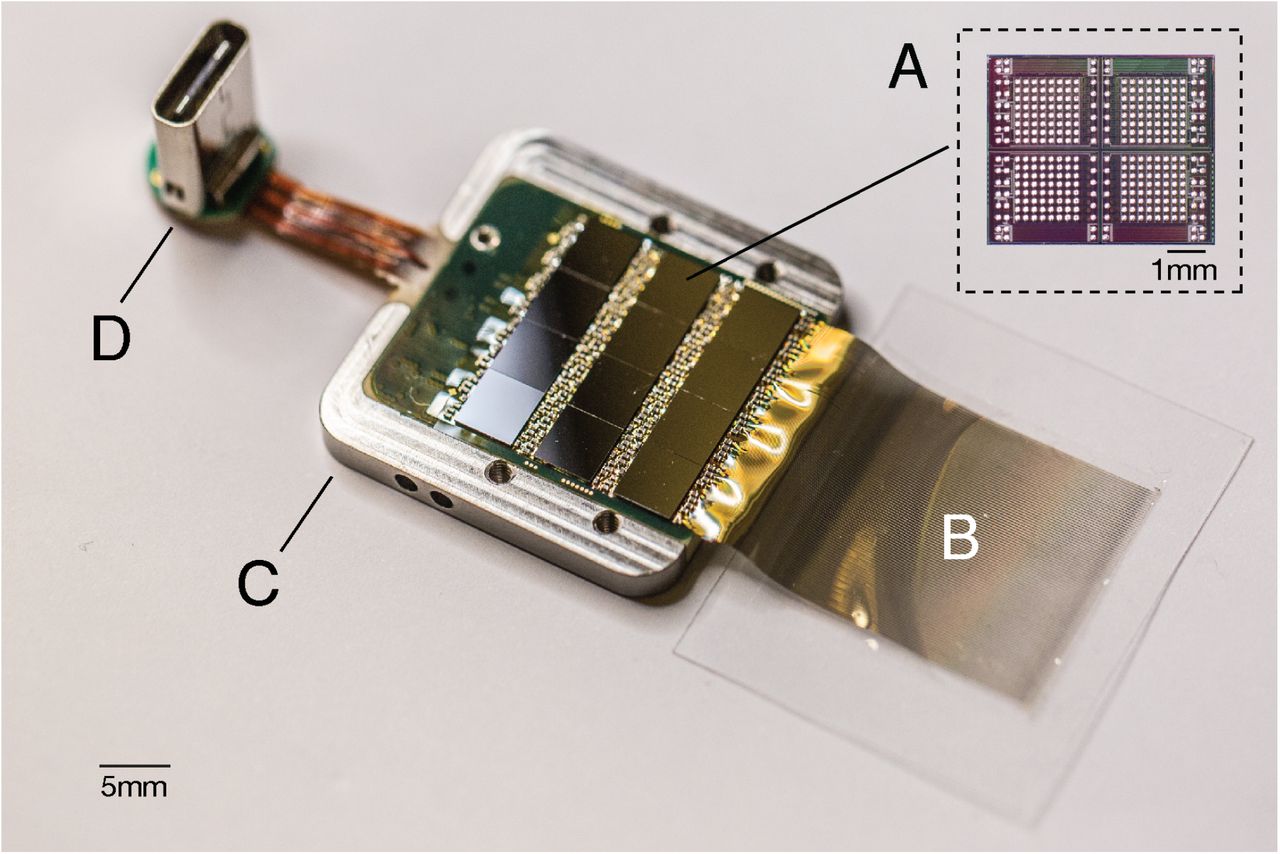
El ADC incorporado realiza el muestreo a una frecuencia de 19.3 kHz con una resolución de 10 bits. Cada píxel analógico consume 5,2 μW, y todo el ASIC consume aproximadamente 6 mW, incluidos los controladores de reloj. Las características de ASIC Neuralink se muestran en la Tabla 1, y una fotografía del dispositivo fabricado se muestra en la Fig. 5A. Figura 5 : Dispositivo táctil en el embalaje. R. Cada chip individual en un ASIC es capaz de procesar 256 canales de datos. El conjunto completo del dispositivo contiene 12 de estos chips, que en total son 3072 canales. B. Hilos de polímeros en base de parileno. C. Caja de titanio (cubierta quitada). D. Conector digital USB-C para alimentación y transferencia de datos.Neuralink ASIC es el núcleo de una plataforma de grabación modular que facilita el reemplazo de componentes para investigación y desarrollo (Fig. 5). En los sistemas discutidos aquí, varios ASIC se integran en una placa de circuito impreso (PCB) estándar utilizando el método de conexión de chip invertido. Cada sistema consta de una matriz de puertas programable por el usuario (aprox. FPGA); sensores de temperatura, acelerómetro, magnetómetro en tiempo real y un conector USB-C para transmisión de datos con ancho de banda completo. Los sistemas están empaquetados en cajas de titanio recubiertas con C-Parileno, que sirve como barrera contra la humedad para evitar la penetración de líquidos y extender la vida útil.Describimos las configuraciones creadas: el sistema de grabación en 1536 canales ("Sistema A") y el sistema de grabación en 3072 canales ("Sistema B"), en la Tabla 2. Mientras que el Sistema A usa el ASIC Neuralink de generación actual, el Sistema B usa el anterior versión con funcionalidad comparable, pero con características de rendimiento más bajas. El Sistema B fue diseñado para maximizar la densidad del canal y se utiliza para aplicaciones que requieren una cantidad extremadamente grande de canales. El sistema A, por el contrario, fue diseñado para proporcionar una instalación más rápida y confiable; Se puede instalar cinco veces más rápido que el sistema B, que es más eficiente.
Figura 5 : Dispositivo táctil en el embalaje. R. Cada chip individual en un ASIC es capaz de procesar 256 canales de datos. El conjunto completo del dispositivo contiene 12 de estos chips, que en total son 3072 canales. B. Hilos de polímeros en base de parileno. C. Caja de titanio (cubierta quitada). D. Conector digital USB-C para alimentación y transferencia de datos.Neuralink ASIC es el núcleo de una plataforma de grabación modular que facilita el reemplazo de componentes para investigación y desarrollo (Fig. 5). En los sistemas discutidos aquí, varios ASIC se integran en una placa de circuito impreso (PCB) estándar utilizando el método de conexión de chip invertido. Cada sistema consta de una matriz de puertas programable por el usuario (aprox. FPGA); sensores de temperatura, acelerómetro, magnetómetro en tiempo real y un conector USB-C para transmisión de datos con ancho de banda completo. Los sistemas están empaquetados en cajas de titanio recubiertas con C-Parileno, que sirve como barrera contra la humedad para evitar la penetración de líquidos y extender la vida útil.Describimos las configuraciones creadas: el sistema de grabación en 1536 canales ("Sistema A") y el sistema de grabación en 3072 canales ("Sistema B"), en la Tabla 2. Mientras que el Sistema A usa el ASIC Neuralink de generación actual, el Sistema B usa el anterior versión con funcionalidad comparable, pero con características de rendimiento más bajas. El Sistema B fue diseñado para maximizar la densidad del canal y se utiliza para aplicaciones que requieren una cantidad extremadamente grande de canales. El sistema A, por el contrario, fue diseñado para proporcionar una instalación más rápida y confiable; Se puede instalar cinco veces más rápido que el sistema B, que es más eficiente.
 Una estación base conectada a una red de área local Ethernet convierte los flujos de datos de estos sistemas en paquetes de multidifusión Ethernet 10G que permiten a los usuarios posteriores procesar datos de varias maneras, por ejemplo, visualización de datos en tiempo real [34] o grabación en disco. Cada estación base puede conectar hasta tres implantes simultáneamente. Los dispositivos también son compatibles con un ecosistema de software que proporciona facilidad de uso según el principio de "plug and play" con configuración cero: el flujo de datos se activa automáticamente cuando se conecta el cable.
Una estación base conectada a una red de área local Ethernet convierte los flujos de datos de estos sistemas en paquetes de multidifusión Ethernet 10G que permiten a los usuarios posteriores procesar datos de varias maneras, por ejemplo, visualización de datos en tiempo real [34] o grabación en disco. Cada estación base puede conectar hasta tres implantes simultáneamente. Los dispositivos también son compatibles con un ecosistema de software que proporciona facilidad de uso según el principio de "plug and play" con configuración cero: el flujo de datos se activa automáticamente cuando se conecta el cable.5. Electrofisiología
Implantamos los sistemas A y B en ratas macho Long-Evans como se describe en la sección 3. Todos los procedimientos con animales se realizaron de acuerdo con las pautas del Consejo Nacional de Investigación para el Cuidado y Uso de Animales de Laboratorio y fueron aprobados por el Comité de Cuidado y Uso de Animales de Neuralink. Las grabaciones electrofisiológicas se realizaron cuando los animales exploraron libremente una arena equipada con un cable que permitía un movimiento ilimitado. El sistema A puede grabar 1344 de 1536 canales simultáneamente, la configuración exacta del canal se puede especificar arbitrariamente durante la grabación; El sistema B puede grabar desde todos los 3072 canales simultáneamente. Las señales de banda ancha digitalizadas se procesaron en tiempo real para determinar los potenciales de acción de las neuronas (picos) utilizando el algoritmo de detección en línea. Figura 6 : Implantación y montaje de roscas. A. Un ejemplo de una imagen en vivo que muestra la superficie de la corteza con hilos implantados y sangrado mínimo. B. Conjunto del sensor ("Sistema B"), implantado permanentemente en la rata.Los requisitos de detección de picos en tiempo real para los NQF son diferentes de los estudios neurofisiológicos más tradicionales. Si bien la mayoría de los electrofisiólogos desconectan los datos y dedican un esfuerzo significativo a rechazar los eventos pico falsos positivos, los eventos NQI deben detectarse en tiempo real, y los parámetros de detección pico deben maximizar el rendimiento de decodificación. Usando nuestro software dedicado de detección de picos en línea, descubrimos que un filtro de resolución que permita falsos positivos de ± 0.2 Hz es mejor que establecer umbrales estrictos que puedan rechazar picos reales (datos no mostrados).Dadas estas consideraciones, establecemos un umbral en> 0.35 Hz para determinar el número de electrodos que registraron picos. Como generalmente no clasificamos los datos por picos, no informamos varias unidades por canal. Los decodificadores de IMC generalmente funcionan sin clasificar con una pérdida mínima de rendimiento [36, 37]. Además, los resultados recientes muestran que la clasificación de picos no es necesaria para una evaluación precisa de la dinámica de una población neural [38].Los datos de un experimento reciente con el sistema A se muestran en la Fig. 7 y fig. 8. En este experimento, 40 de 44 intentos de inserción tuvieron éxito (90%) para un total de 1280 electrodos implantados, de los cuales 1020 se registraron simultáneamente. Las señales de banda ancha registradas a partir de los filamentos presentados muestran tanto los potenciales locales como la actividad máxima de la figura 7. Un ejemplo de la salida del sistema de detección de picos se muestra como una trama en la Fig. 8. En este ejemplo, se utilizaron dos configuraciones de grabación superpuestas para grabar desde los 1.280 canales implantados. En este conjunto, nuestro rendimiento máximo ascendió al 53,4% de los canales, y muchos picos aparecieron en varios canales vecinos, como se observó en otros experimentos con una alta densidad de electrodos [16, 17, 21]. En otras matrices del sistema A, obtuvimos un resultado de 59.10 ± 5,74% (media ± error estándar de la media) en 19 operaciones con un máximo de 85.5%.
Figura 6 : Implantación y montaje de roscas. A. Un ejemplo de una imagen en vivo que muestra la superficie de la corteza con hilos implantados y sangrado mínimo. B. Conjunto del sensor ("Sistema B"), implantado permanentemente en la rata.Los requisitos de detección de picos en tiempo real para los NQF son diferentes de los estudios neurofisiológicos más tradicionales. Si bien la mayoría de los electrofisiólogos desconectan los datos y dedican un esfuerzo significativo a rechazar los eventos pico falsos positivos, los eventos NQI deben detectarse en tiempo real, y los parámetros de detección pico deben maximizar el rendimiento de decodificación. Usando nuestro software dedicado de detección de picos en línea, descubrimos que un filtro de resolución que permita falsos positivos de ± 0.2 Hz es mejor que establecer umbrales estrictos que puedan rechazar picos reales (datos no mostrados).Dadas estas consideraciones, establecemos un umbral en> 0.35 Hz para determinar el número de electrodos que registraron picos. Como generalmente no clasificamos los datos por picos, no informamos varias unidades por canal. Los decodificadores de IMC generalmente funcionan sin clasificar con una pérdida mínima de rendimiento [36, 37]. Además, los resultados recientes muestran que la clasificación de picos no es necesaria para una evaluación precisa de la dinámica de una población neural [38].Los datos de un experimento reciente con el sistema A se muestran en la Fig. 7 y fig. 8. En este experimento, 40 de 44 intentos de inserción tuvieron éxito (90%) para un total de 1280 electrodos implantados, de los cuales 1020 se registraron simultáneamente. Las señales de banda ancha registradas a partir de los filamentos presentados muestran tanto los potenciales locales como la actividad máxima de la figura 7. Un ejemplo de la salida del sistema de detección de picos se muestra como una trama en la Fig. 8. En este ejemplo, se utilizaron dos configuraciones de grabación superpuestas para grabar desde los 1.280 canales implantados. En este conjunto, nuestro rendimiento máximo ascendió al 53,4% de los canales, y muchos picos aparecieron en varios canales vecinos, como se observó en otros experimentos con una alta densidad de electrodos [16, 17, 21]. En otras matrices del sistema A, obtuvimos un resultado de 59.10 ± 5,74% (media ± error estándar de la media) en 19 operaciones con un máximo de 85.5%. Figura 7 : Izquierda: señales neuronales de banda ancha (sin filtrar) obtenidas simultáneamente de una hebra (32 canales) implantada en la corteza cerebral de la rata. Cada canal (fila) corresponde a una porción del electrodo en el filamento (diagrama a la izquierda; secciones separadas 50 μm). Los picos y los potenciales de campo locales son obvios. Derecha: formas de onda prospectivas (sin clasificar); los números indican la ubicación del canal en la transmisión. La onda media se muestra en negro.
Figura 7 : Izquierda: señales neuronales de banda ancha (sin filtrar) obtenidas simultáneamente de una hebra (32 canales) implantada en la corteza cerebral de la rata. Cada canal (fila) corresponde a una porción del electrodo en el filamento (diagrama a la izquierda; secciones separadas 50 μm). Los picos y los potenciales de campo locales son obvios. Derecha: formas de onda prospectivas (sin clasificar); los números indican la ubicación del canal en la transmisión. La onda media se muestra en negro.6. Discusión
Describimos un NIR con un alto número de canales y una resolución de un pico. Se basa en sensores de polímeros flexibles, un sistema de entrada robótico y electrónica especial de baja potencia. Este sistema tiene dos propósitos principales: es una plataforma de investigación para su uso en roedores y sirve como prototipo para futuros implantes clínicos humanos. La capacidad de iterar rápidamente estructuras y probar roedores le permite mejorar rápidamente dispositivos, procesos de producción y software. Debido a que es una plataforma de investigación, el sistema utiliza una conexión por cable para maximizar el rendimiento para la transmisión de datos sin procesar. Esto es importante para evaluar el rendimiento y es fundamental para desarrollar algoritmos de procesamiento y decodificación de señales. En contraste,Los dispositivos clínicos que se fabricarán en esta plataforma serán completamente implantables, lo que requerirá un empaquetado hermético, y tendrán compresión de señal incorporada, menor consumo de energía, transferencia inalámbrica de energía y telemetría de datos a través de la piel sin usar cables. Figura 8 : Nuestros dispositivos permiten la detección de actividad neuronal generalizada, distribuida en varias áreas del cerebro y las capas corticales. Izquierda: los sitios de inyección (círculos de colores) se indican en la imagen del cerebro del roedor. [35] Derecha: trama de 1020 canales grabados simultáneamente ordenados por secuencias (el color corresponde al punto de inserción). Barra lateral: una imagen ampliada de picos de un hilo. Este hilo corresponde al que se muestra en la fig.
Figura 8 : Nuestros dispositivos permiten la detección de actividad neuronal generalizada, distribuida en varias áreas del cerebro y las capas corticales. Izquierda: los sitios de inyección (círculos de colores) se indican en la imagen del cerebro del roedor. [35] Derecha: trama de 1020 canales grabados simultáneamente ordenados por secuencias (el color corresponde al punto de inserción). Barra lateral: una imagen ampliada de picos de un hilo. Este hilo corresponde al que se muestra en la fig. 7)
La modulación de la actividad neuronal será una parte importante de las interfaces clínicas cerebro-máquina de próxima generación [39], por ejemplo, para proporcionar un sentido del tacto o propiocepción para controlar los movimientos neuroprotésicos [40, 41]. Por lo tanto, desarrollamos un ASIC Neuralink capaz de estimulación eléctrica en cada canal, aunque no hemos demostrado estas capacidades aquí.Este sistema NQI tiene varias ventajas sobre los enfoques anteriores. El tamaño y la composición de las sondas de película delgada se adaptan mejor a las propiedades del material del tejido cerebral que las sondas de silicio comúnmente utilizadas y, por lo tanto, pueden mostrar una mayor biocompatibilidad [28, 21]. Además, la capacidad de elegir dónde insertar nuestras sondas, incluso en las estructuras subcorticales, nos permite crear nuestras propias geometrías de matrices para apuntar a ciertas áreas del cerebro sin dañar las redes vasculares. Esta característica es importante para crear un NKI de alto rendimiento, ya que la distribución de los electrodos se puede ajustar según los requisitos de la tarea. FinalmenteLa miniaturización y el diseño de Neuralink ASIC proporcionan una gran flexibilidad en el diseño del sistema y admiten una gran cantidad de canales dentro de un tamaño práctico y bajo consumo de energía.Básicamente, nuestro enfoque de las interfaces cerebro-máquina es extensible y escalable. Aquí informamos sobre la grabación simultánea de banda ancha de más de 3.000 electrodos insertados en una rata que se mueve libremente. En un cerebro más grande, varios dispositivos con esta arquitectura pueden implantarse fácilmente y, por lo tanto, podríamos interactuar con un número mucho mayor de neuronas sin una reingeniería seria. Un mayor desarrollo de la robótica quirúrgica puede permitirnos lograr esto de la misma manera sin aumentar significativamente el tiempo de la cirugía.Antes de que un dispositivo con gran ancho de banda sea adecuado para uso clínico, será necesario resolver una serie de problemas tecnológicos serios, pero ahora es fácil imaginar que dicho dispositivo permitirá a los pacientes con lesiones de la médula espinal controlar inteligentemente un mouse y teclado digital. Y en combinación con la mejora rápida de los métodos de estimulación de la médula espinal [42], en el futuro este enfoque podría restaurar la función motora. Las interfaces neuronales de alto rendimiento deben proporcionar muchas opciones terapéuticas nuevas.7. Agradecimientos
Nos gustaría agradecer a Livermore National Laboratory. Lawrence (LLNL), Berkeley Marvell Nanotechnology Laboratory, Berkeley Wireless Research Center (BWRC), Stanford Nanotechnology Center y antiguos y actuales empleados de Neuralink por sus contribuciones al trabajo descrito aquí.8. Videos adicionales
Video 1 : Una serie de seis insertos de un robot neuroquirúrgico en una imitación de tejido cerebral en agarosa. La captura de hilo por una aguja ocurre fuera del marco. Los cambios en el color de fondo son causados por la iluminación a diferentes frecuencias de luz en diferentes etapas del proceso de apósito e inserción. Se insertó un hilo antes del inicio del video. De vídeo .Video 2 : Visualización tridimensional del proceso de implantación de hilo (mismos datos que en la Fig. 8). La inserción del hilo se visualiza en el mismo orden que en la operación real, pero en el modo de reproducción rápida. El tamaño del hilo y la profundidad de inserción son típicos. Las coordenadas estereotácticas de cada inserto se presentan en un conjunto de datos proporcionado por Calabrese y colaboradores [35]. De vídeo .9. Fuentes[1] Leigh R. Hochberg y col. "Control del conjunto neuronal de dispositivos protésicos por un humano con tetraplejia". En: Nature 442 (2006), p. 164. issn: 1476-4687.
[2] Wei Wang y col. "Una interfaz cerebral electrocorticográfica en un individuo con tetraplejia". En: PLoS ONE 8 (2013), e55344.
[3] Tyson Aflalo y col. "Decodificación de imágenes motoras de la corteza parietal posterior de un ser humano tetrapléjico". En: Science 348 (2015), pp. 906–910. issn: 0036-8075.
[4] Leigh R. Hochberg y col. "Alcance y alcance por personas con tetraplejia utilizando un brazo robótico controlado neuronalmente". En: Nature 485 (2012), p. 372. issn: 1476-4687.
[5] Jennifer L Collinger y col. "Control neuroprostético de alto rendimiento por un individuo con tetraplejia". En: The Lancet 381 (2013), pp. 557-564. issn: 0140-6736.
[6] Gopala K. Anumanchipalli, Josh Chartier y Edward F. Chang. "Síntesis del habla a partir de la decodificación neural de oraciones habladas". En: Nature 568 (2019), pp. 493–498. issn: 0028-0836.
[7] György Buzsáki, Costas A. Anastassiou y Christof Koch. "El origen de los campos y corrientes extracelulares: EEG, ECoG, LFP y picos". En: Nature Reviews Neuroscience 13 (2012), p. 407. issn: 1471-0048.
[8] Bijan Pesaran y col. "Investigar dinámicas cerebrales a gran escala utilizando grabaciones potenciales de campo: análisis e interpretación". En: Nature Neuroscience 21 (2018), pp. 903–919. issn: 1097-6256.
[9] Taro Kaiju y col. "Registro ECoG de alta resolución espacio-temporal de potenciales evocados somatosensoriales con matrices flexibles de microelectrodo". En: Fronteras en los circuitos neuronales 11 (2017), p. 20)
[10] Rafael Yuste. "De la doctrina neuronal a las redes neuronales". En: Nature Reviews Neuroscience 16 (2015), pp. 487-497. Issn: 1471-003x.
[11] Guosong Hong y Charles M Lieber. "Nuevas tecnologías de electrodos para grabaciones neuronales". En: Nature Reviews Neuroscience (2019), pp. 1-16. issn: 1471-003X.
[12] Edwin M. Maynard, Craig T. Nordhausen y Richard A. Normann. "La matriz de electrodos intracorticales de Utah: una estructura de grabación para posibles interfaces cerebro-computadora". En: Electroencefalografía y Neurofisiología Clínica 102.3 (1997), pp. 228–239. issn: 0013-4694.
[13] Miguel AL Nicolelis y col. "Grabaciones crónicas, multisitio, multielectrodo en monos macacos". En: Actas de la Academia Nacional de Ciencias 100.19 (2003), pp. 11041-11046. issn: 0027-8424. eprint:
www . pnas.org/content/100/19/11041.full.pdf.
[14] KD Wise y col. "Microelectrodos, microelectrónica y microsistemas neuronales implantables". En: Actas del IEEE 96.7 (2008), pp. 1184-1202. issn: 0018-9219.
[15] Nicholas M. Dotson y col. "Un sistema de grabación de microdrive semi-crónico a gran escala para primates no humanos". En: Neuron 96 (2017), 769–782.e2. issn: 0896-6273.
[16] James J. Jun y col. "Sondas de silicio totalmente integradas para el registro de alta densidad de la actividad neuronal". En: Nature 551 (2017), p. 232. issn: 1476-4687.
[17] Gian Nicola Angotzi y col. "SiNAPS: una sonda CMOS con sensor de píxeles activos implantable para grabaciones neuronales simultáneas a gran escala". En: Biosensores y Bioelectrónica 126 (2018), pp. 355-364. issn: 0956-5663.
[18] Felix Deku y col. "Conjuntos de electrodos ultramicroelectrodos de carburo de silicio amorfo para la estimulación neural y la grabación". En: Journal of Neural Engineering 15.1 (2018), p. 016007.
[19] Aziliz Lecomte, Emeline Descamps y Christian Bergaud. "Una revisión sobre consideraciones mecánicas para sondas neurales implantadas crónicamente". En: Journal of Neural Engineering 15 (2018), p. 031001. issn: 1741-2552.
[20] Dion Khodagholy y col. "NeuroGrid: registro de potenciales de acción desde la superficie del cerebro". En: Nature Neuroscience 18 (2014), pp. 310-315. issn: 1097-6256.
[21] Jason E. Chung y col. "Grabaciones electrofisiológicas de alta densidad, larga duración y multiregión utilizando matrices de electrodos de polímero". En: Neuron 101 (2019), 21-31.e5. issn: 0896-6273.
[22] Stephan L. Chorover y Anne-Marie Deluca. "Un nuevo electrodo múltiple para la grabación crónica de una sola unidad en animales en movimiento". En: Physiology & Behavior 9 (1972), pp. 671–674. issn: 0031-9384.
[23] Jia Liu y col. "Electrónica inyectable con jeringa". En: Nature Nanotechnology 10 (2015), pp. 629-636. issn: 1748-3387.
[24] Tian-Ming Fu y col. "Mapeo cerebral crónico estable a largo plazo a nivel de neurona única". En: Nature Methods 13 (2016), pp. 875–882. issn: 1548-7091.
[25] Flavia Vitale y col. "Microactuación fluídica de electrodos flexibles para grabación neural". En: Nano Letters 18.1 (2018), pp. 326–335. eprint:
doi.org/10.1021/acs.nanolett.7b04184 .
[26] Lan Luan y col. "Las sondas nanoelectrónicas ultraflexibles forman una integración neural confiable, libre de cicatrices gliales". En: Science Advances 3 (2017), e1601966. issn: 2375-2548.
[27] Marc D. Ferro y col. "NeuroRoots, un dispositivo de interfaz cerebro-máquina sin costuras y de inspiración biológica para la grabación a largo plazo" En: bioRxiv (2018), p. 460949.
[28] Timothy L Hanson y col. "La" máquina de coser "para la grabación neural mínimamente invasiva". En: bioRxiv (2019). eprint:
www.biorxiv.org/content/early/2019/03/14/578542.full.pdf .
[29] Kip A Ludwig y col. "Grabaciones neurales crónicas utilizando conjuntos de microelectrodos de silicio depositados electroquímicamente con una película de poli (3,4-etilendioxitiofeno) (PEDOT)". En: Journal of Neural Engineering 3 (2006), p. 59. issn: 1741-2552.
[30] Seth J. Wilks y col. "Poli (3,4-etilendioxitiofeno) como material de interfaz micro-neural para electroestimulación". En: Frontiers in Neuroengineering 2 (2009), p. 7. issn: 1662-6443.
[31] JD Klein, SL Clauson y SF Cogan. "Morfología y capacidad de carga de películas de óxido de iridio pulverizado". En: Journal of Vacuum Science & Technology A: Vacuum, Surfaces, and Films 7 (1989), pp. 3043-3047. issn: 0734-2101.
[32] SF Cogan, TD Plante y J. Ehrlich. "Películas de óxido de iridio salpicadas (SIROF) para electrodos de grabación y estimulación neural de baja impedancia". En: La 26ª Conferencia Internacional Anual de la IEEE Engineering in Medicine and Biology Society 2 (2004), pp. 4153-4156.
[33] Tarun Saxena y col. "El impacto de la violación crónica de la barrera hematoencefálica en la función del electrodo intracortical". En: Biomaterials 34 (2013), pp. 4703–4713. issn: 0142-9612.
[34] Joshua H. Siegle y col. "Open Ephys: una plataforma de código abierto basada en complementos para electrofisiología multicanal". En: J. Neural Eng. 14 (2017), págs. 1–13.
[35] E. Calabrese y col. "Un atlas de histología cuantitativa de resonancia magnética del desarrollo cerebral postnatal de ratas con estimaciones regionales de crecimiento y variabilidad". En: NeuroImage 71 (2013), pp. 196–201.
[36] Sonia Todorova y col. "Ordenar o no ordenar: el impacto de la clasificación de espigas en el rendimiento de la decodificación neural". En: Journal of Neural Engineering 11 (2014), p. 056005. issn: 1741-2552.
[37] Breanne P Christie y col. "Comparación de la clasificación de picos y el umbral de las formas de onda de voltaje para el rendimiento intracortical de la interfaz cerebro - máquina". En: Journal of Neural Engineering 12 (2015), p. 016009. issn: 1741-2552.
[38] Eric M. Trautmann y col. "Estimación precisa de la dinámica de la población neuronal sin clasificación de espigas". En: Neuron (2019). issn: 0896-6273.
[39] Andy Zhou y col. "Un dispositivo de neuromodulación de 128 canales inalámbrico y libre de artefactos para la estimulación en bucle cerrado y la grabación en primates no humanos". En: Nature Biomedical Engineering 3 (2019), pp. 15-26.
[40] Joseph E O'Doherty y col. "Exploración táctil activa utilizando una interfaz cerebro-máquina-cerebro". En: Nature 479 (2011). issn: 1476-4687.
[41] Sharlene N Flesher y col. "La sensación táctil restaurada mejora el control del brazo neuroprotésico". En: bioRxiv (2019), p. 653428.
[42] Fabien B. Wagner y col. "La neurotecnología dirigida restaura el caminar en humanos con lesión de la médula espinal". En: Nature 563 (2018), pp. 65-71. issn: 0028-0836.