Hoy contaré y mostraré cómo repetir el efecto de la levitación ultrasónica con mis propias manos en casa.
En artículos anteriores,
uno ,
dos . Demostré pseudo levitación. Esta vez todo es real. Comenzaré con la teoría.
Vibraciones sonoras
Para comprender toda la esencia del efecto de levitación, debe comprender qué son una onda de sonido y una onda estacionaria.
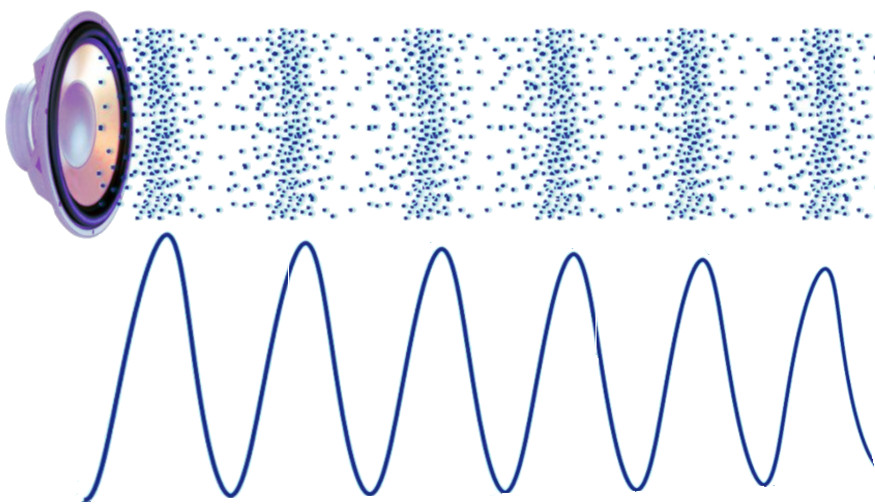
Por lo tanto, comenzaré con ellos. Una onda acústica se propaga en todas las direcciones y consta de dos medias ondas, positivas y negativas. La media onda positiva es una zona de compresión o alta presión, en el futuro la llamaré compresión, y la media onda negativa la zona de descarga, la llamaremos descompresión.
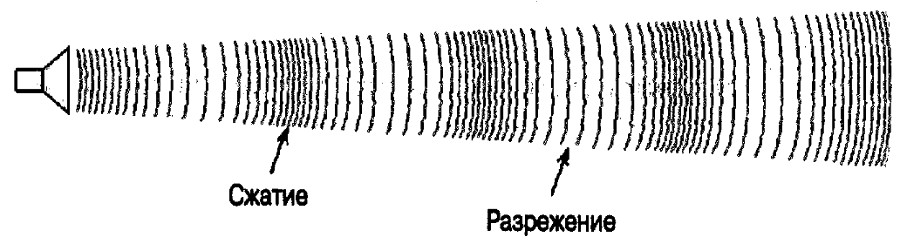
En la práctica, se ve así: el difusor del altavoz crea compresión cuando se mueve hacia afuera y se descomprime cuando se mueve hacia adentro. Esto se muestra claramente en la imagen.
La potencia de onda máxima se crea cerca del difusor dinámico de la cabeza y, a medida que se aleja del emisor, pierde gradualmente su potencia, cuanto más se aleja del altavoz, más débil es.
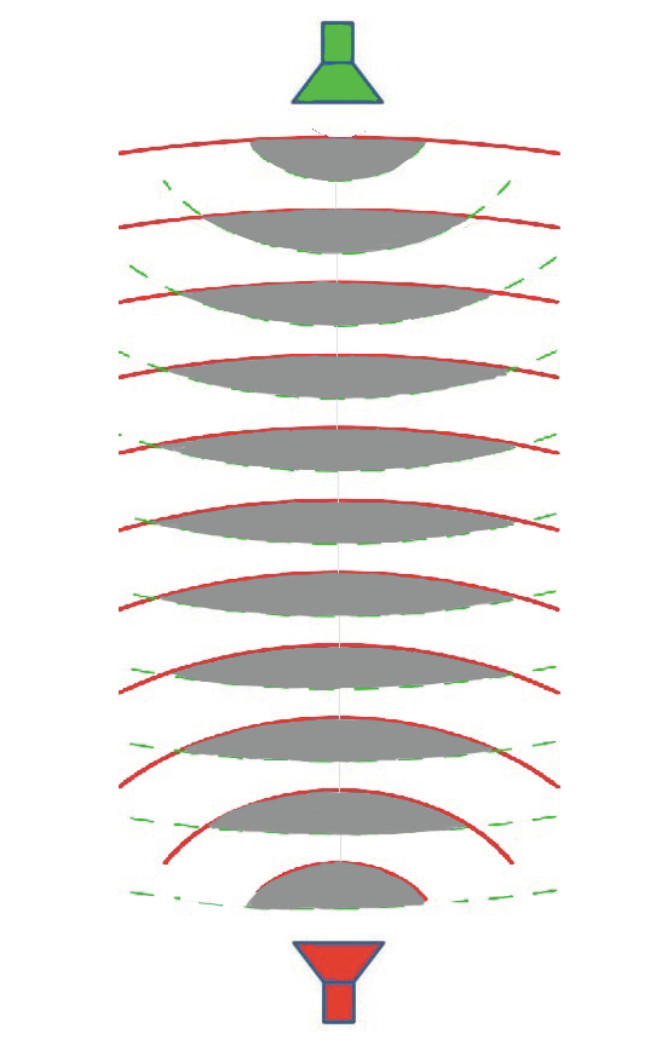
Una onda estacionaria es una onda que se forma cuando se superponen dos contrapropagaciones, que coinciden en fase y con la misma frecuencia de onda. Si una onda ordinaria pierde su poder en el proceso de propagación en el espacio, entonces las ondas estacionarias a pequeñas distancias forman nodos con una potencia aproximadamente igual. Esto se logra plegando ondas multidireccionales. La onda debilitante se amplifica por la onda que se aproxima. Para entender cómo sucede esto, mira la imagen a continuación. Los nodos o en nuestros casos los estantes de las ondas estacionarias están resaltados en gris. En estos estantes (nodos) y artículos retenidos.
 La longitud de onda
La longitud de onda es la velocidad del sonido dividida por la frecuencia de las oscilaciones. A una temperatura de 20 ° C y una humedad del 50%, el sonido se propaga en dicho entorno a una velocidad de 340 m / s. La frecuencia de resonancia de nuestro emisor piezoeléctrico es de aproximadamente 40,000 Hz. Como resultado, obtenemos una longitud de onda de 340,000 mm / 40,000 Hz = 8.5 mm. La longitud de onda estacionaria será la misma de 8,5 mm.
Los emisores pueden ubicarse a diferentes distancias entre sí, pero siempre debe ser un múltiplo de la longitud de onda. Cuanto más pequeña es la distancia entre los emisores, más poderosos son los nodos de la onda estacionaria. Cuanto más espacio entre los transmisores acústicos, más nodos hay entre ellos, pero el poder de los nodos se debilita y viceversa. También debe comprender que para mantener una gran cantidad de objetos en los nodos de las ondas y a una mayor distancia entre los emisores ultrasónicos, se necesitarán cabezales piezoeléctricos más potentes. Por ejemplo, de radares de estacionamiento de automóviles o de humidificadores domésticos. En este artículo, considero el emisor ultrasónico más asequible y asequible. Que se puede quitar del
telémetro HC-SR04 .
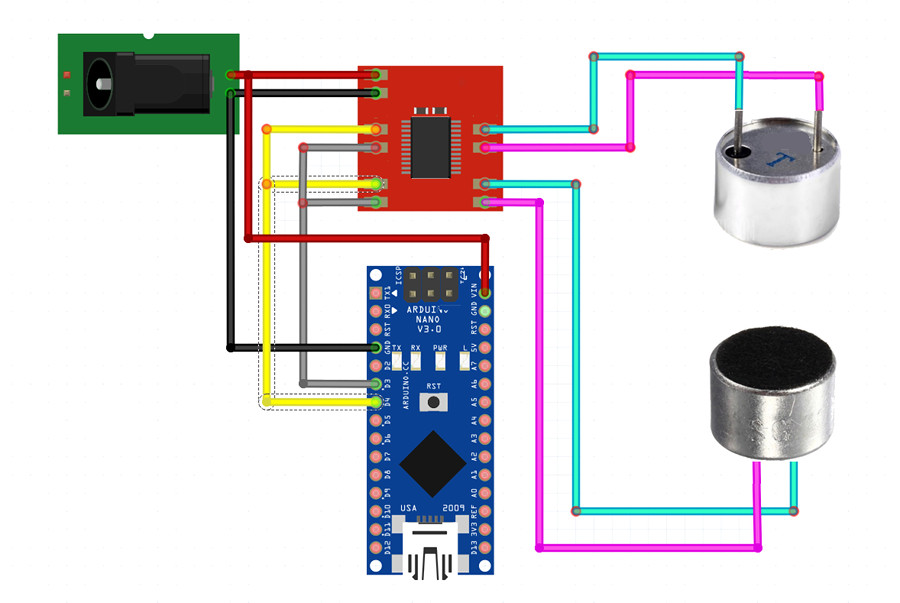
Diagrama de conexión : utilicé
Arduino nano y
el controlador del motor MX1508 , podría haberlo hecho con el generador NE555, y como amplificador para los emisores, utilicé el chip MAX232 instalado en el telémetro HC-SR04, pero elegí un camino más simple para mí que me ahorró tiempo. Como no me llevó más de 5 minutos ensamblar el levitrón acústico. Hice las conexiones con el kit de cables dupont.
Descripción del boceto Arduino
El código no es nada especial. Todo se reduce a configurar un temporizador y sacudir el puerto D Arduino. Para hacer esto, coloque el Temporizador1 en modo de reinicio por coincidencia (CTC) y ahora, cuando los valores del registro de cuenta TCNT1 coincidan con el número especificado en el registro de comparación OCR1A, se activará una interrupción, en el procesador del cual se invertirá todo el puerto D. Después de eso, el registro de conteo se reiniciará y después de salir El procesador comenzará el proceso de conteo en uno nuevo.
El valor del registro OCR1A que necesitamos se calcula de la siguiente manera: dado que el divisor en el registro TCCR1B está apagado, tomamos la frecuencia de reloj de 16,000,000 Hz y la dividimos por la frecuencia de interrupción deseada 80,000 Hz, como resultado obtenemos el número 200, este será nuestro valor para registrar OCR1A.
¿Por qué 80 kHz, no 40 kHz, preguntas? Porque el período en el controlador se forma en dos operaciones de interrupción. Durante la primera operación, las salidas forman D3 = 0 y D4 = 1, y en la segunda, D3 = 1 y D4 = 0.
Código para Arduino
volatile uint8_t portD3_D4 = 8; // D3 D4 void setup() { pinMode(3, OUTPUT); pinMode(4, OUTPUT); // Timer1 TCNT1 = 0; TCCR1A = 0; TCCR1B = 0; OCR1A = 199; // 16 / 80 = 200 TCCR1B = (1 << WGM12)|(1 << CS10); // CTC, TIMSK1 |= (1 << OCIE1A); // } void loop () {} ISR (TIMER1_COMPA_vect) // { PORTD = portD3_D4; // portD3_D4 = 255-portD3_D4;// }