
En los últimos años quería tener un juguete en el panel de control y siempre con un video. Pero no compre ya hecho, hágalo usted mismo. Y al final me ordené un juguete así, con un sistema de control simple, pero con un gran potencial para la modernización. Tomó ~ 9 meses completar todo el trabajo desde el inicio hasta casi su finalización. Durante la mayor parte de este tiempo, los componentes de China estaban esperando.
Estoy escribiendo un artículo en su mayor parte para mí, para que en el futuro no olvide lo que hice, cómo, por qué y por qué.
Contendrá dos partes principales: hardware y software, y posiblemente otra parte sobre el diseño del hierro. Primero, describiré el hardware, del cual recopilé, qué problemas encontré y cómo los resolví.
1. Hardware
El sistema consta de un panel de control y un equipo instalado en una máquina de escribir. Consideremos con más detalle.
1.1 Panel de control
Componentes
Sombrero de juego
Game HAT fue seleccionado porque Esta es una solución llave en mano que combina una pantalla, un joystick y un teclado suficientes para controlar la máquina.

El joystick en este tablero es KY-023. Decidió usar en lugar del volante. Pero resultó que Raspberry no tiene un ADC y los únicos valores que se pueden obtener de él son 0 y 1, lo que claramente no es suficiente para una rotación suave de las ruedas.

ADS1115
Este problema fue resuelto por el módulo ADS1115.
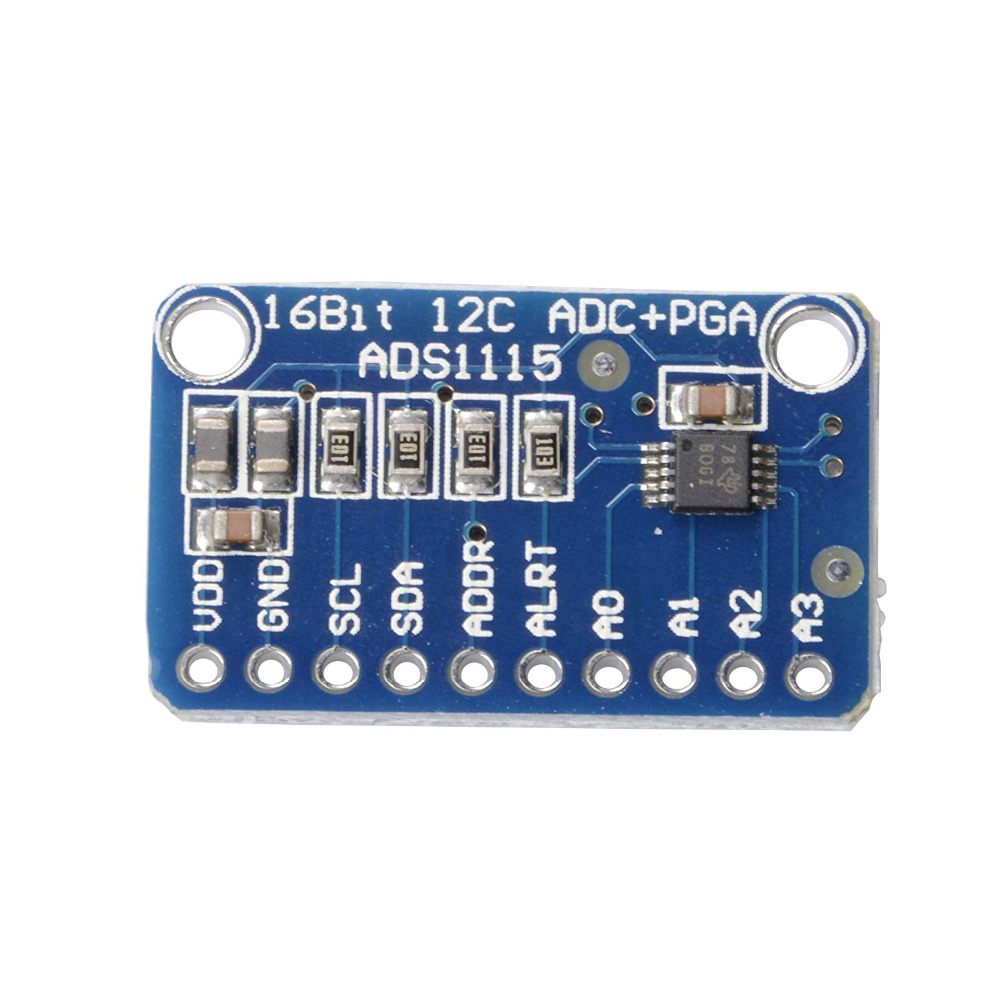
El módulo fue soldado al Game HAT y conectado a él con cinta 3M. Las lecturas se toman de las patas centrales de las resistencias variables en el joystick. Se ve así:

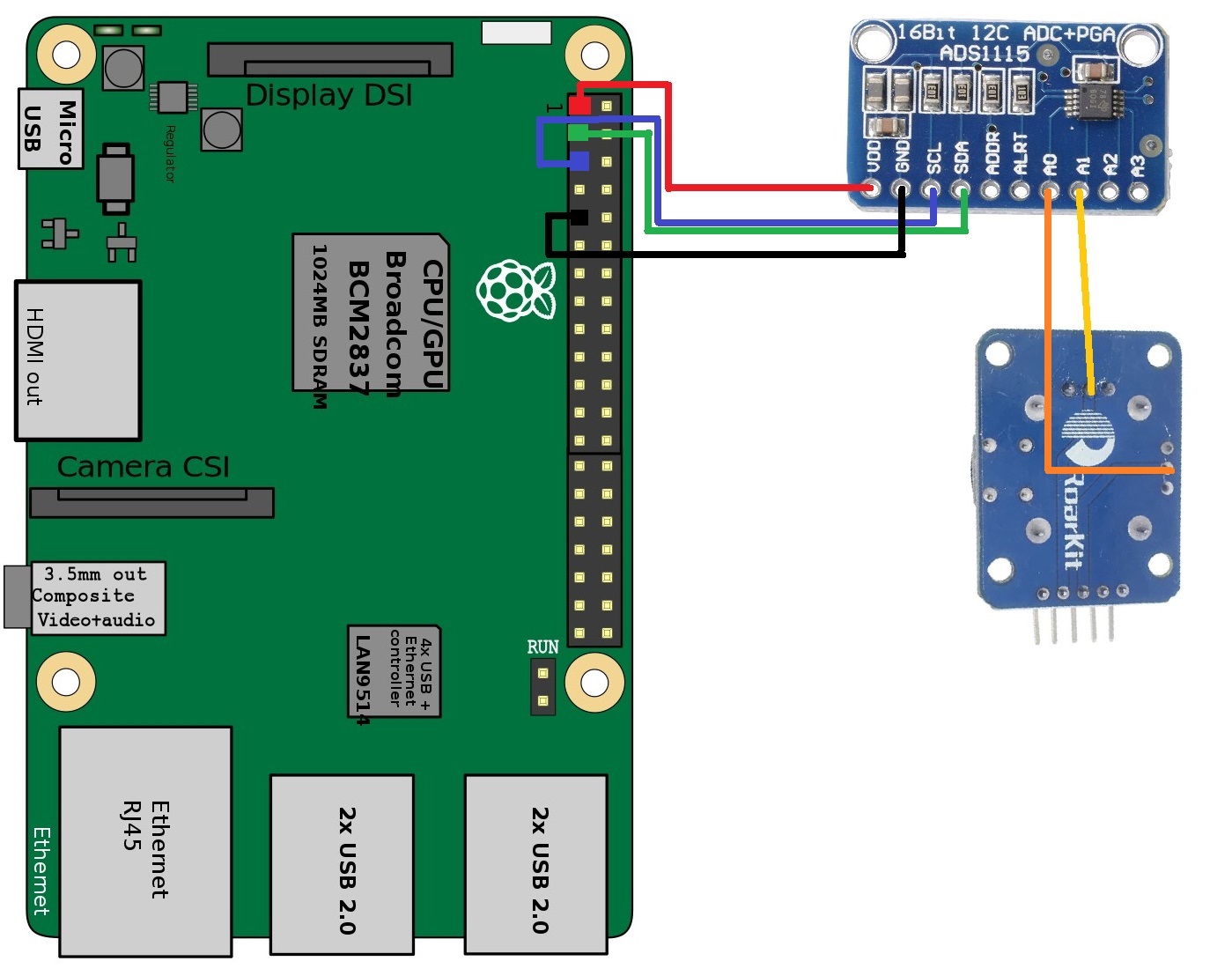
El joystick está soldado de manera similar en el juego HAT. Los cables están soldados a los conectores de Game HAT, que corresponden a los conectores de alimentación e I2C de la Raspberry. Diagrama de cableado:
Esto completa la colección de hardware del panel de control. Exteriormente, no sufrió ningún cambio visible.
1.2 máquina
Cómo se ve todo horrible debajo del capó:
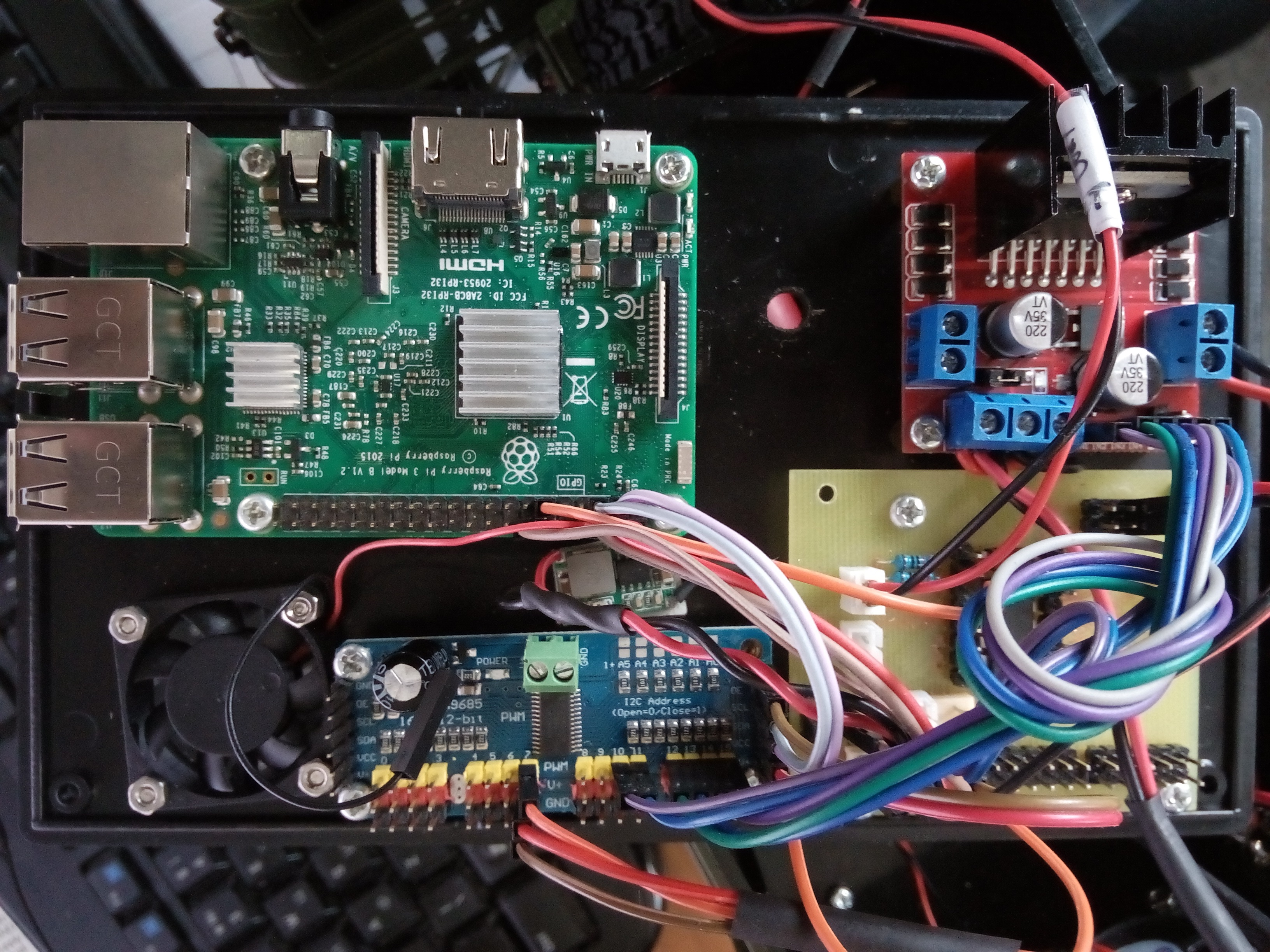
Vamos a hacerlo bien.
Componentes
- Frambuesa pi 3
- Cámara Raspberry Pi v2 NoIR
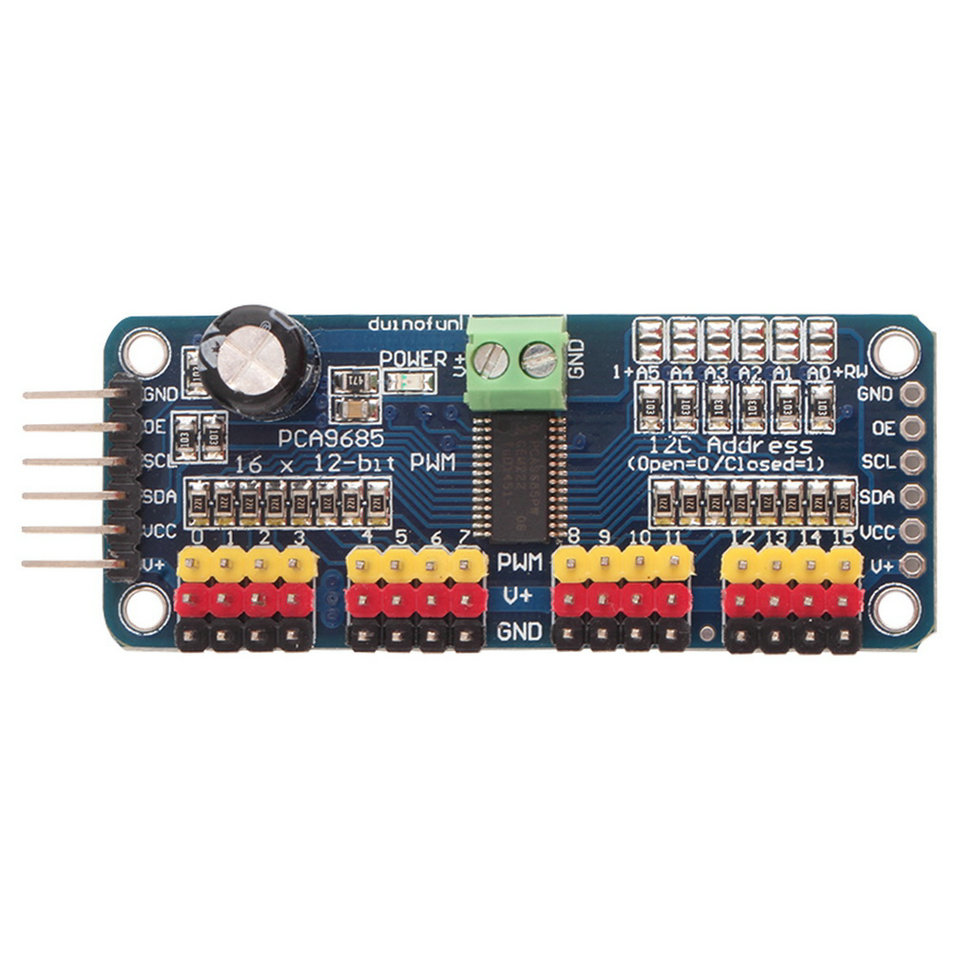
- PCA9685 PWM Generator
- Mini-360 convertidor reductor de potencia
- Controlador de carga BMS CF-4S30A-A
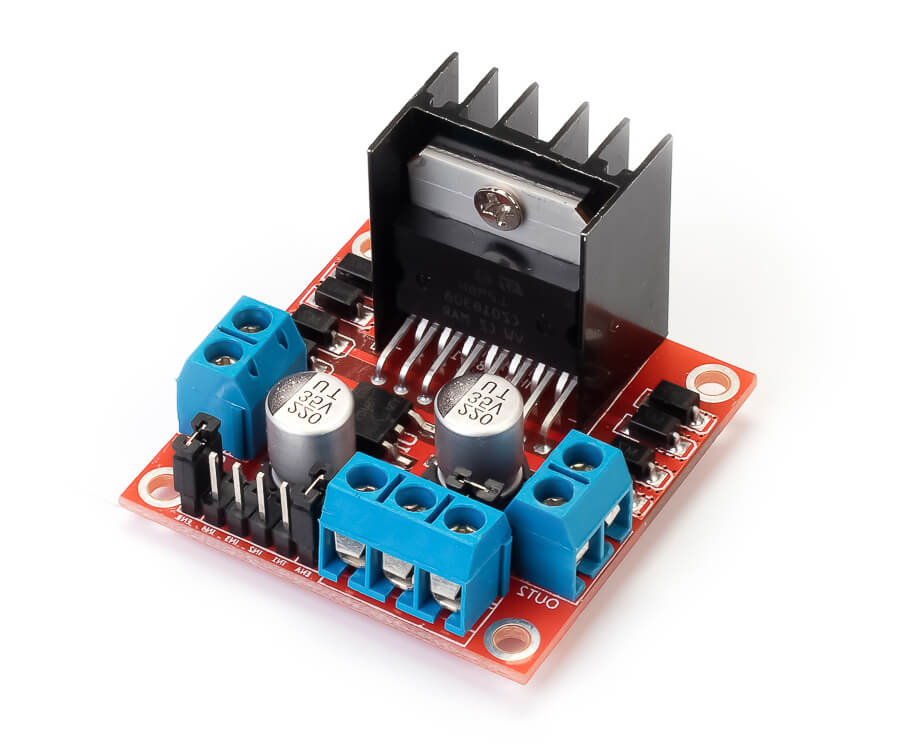
- Controlador de control de motor L298N
- Mi tablero de control de luz basado en el controlador L293
- 3 baterías de iones de litio 18650
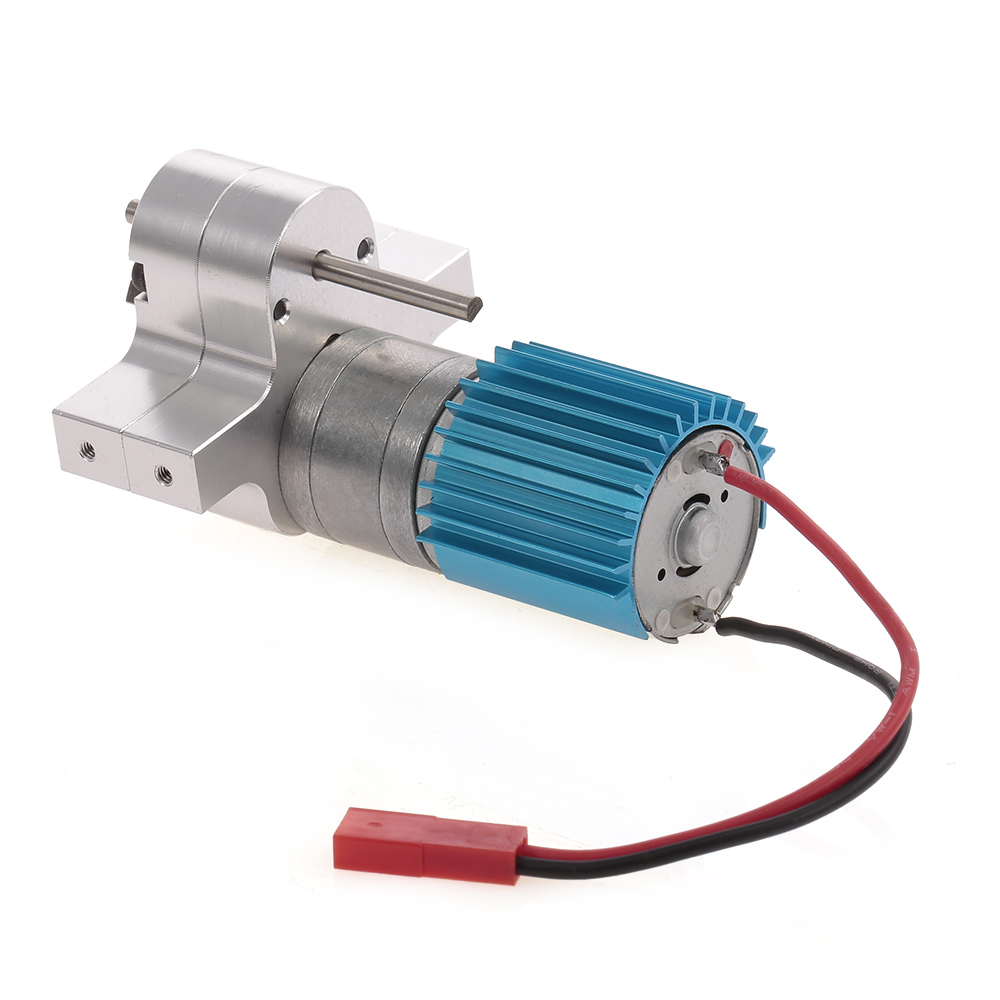
- 370 motor
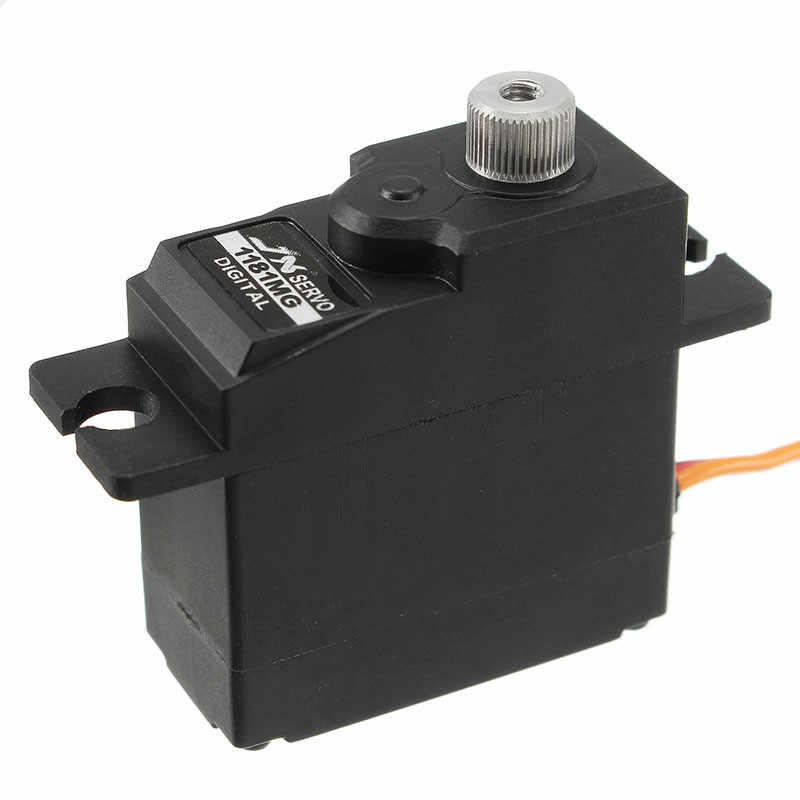
- DI-1181MG Servo
Nutrición
Comencemos por la fuente de alimentación, que es proporcionada por tres baterías 18650 conectadas en serie y que dan ~ 12 voltios.
Las baterías se conectan a través de la placa BMS CF-4S30A-A para que puedan cargarse y no descargarse a cero en el pokatushki.
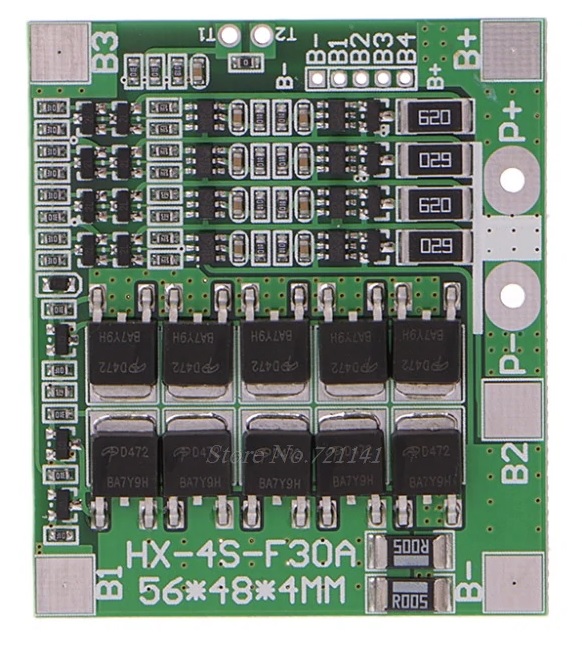
Pero esta placa está diseñada para 4 baterías, por lo que se rehizo para trabajar con 3 baterías. ¿Por qué fue tomada, y no 3S 40A BMS? Porque ella estaba cerca.
Esquema de alteración:

Este voltaje alimenta el motor 370 a través del controlador L298N.
Para alimentar la Raspberry, se utiliza el voltaje de las mismas baterías, pero el módulo Mini-360 reduce el voltaje a 5 voltios.

Frambuesa accionado directamente sobre sus patas.
Movimiento
Ahora hablemos de cómo conduce el automóvil. Para controlar el mecanismo de dirección, se utiliza un servoaccionamiento DI-1181MG, que se controla con el PCA9685. PCA9685 también es responsable de controlar el motor ajustando su velocidad y sentido de rotación a través del controlador L298N. Raspberry también controla el PCA9685 en el bus I2C. El PCA9685 funciona con 5 voltios con un convertidor reductor. Esto es suficiente para los servos y el control del motor. El motor está conectado a dos salidas L298N para aumentar la potencia.
Video
Para el video que usé Camera v2 NoIR, se conecta fácilmente a Raspberry. Pero hubo algunas mejoras. El bucle estándar de la cámara tenía 15 cm de largo, lo que no era suficiente para el trabajo de instalación. Este bucle tampoco es estándar, tiene 15 pines. En aliexpress, para un bucle largo para esta cámara, los chinos quieren más de 1000 rublos. Por lo tanto, se compró un conjunto de 10 bucles estándar de 16 pines ~ por 300 rublos. Y con la ayuda de la tecnología de alta tecnología para el uso de tijeras de oficina, se rehizo un cable de 15 pines para la cámara.
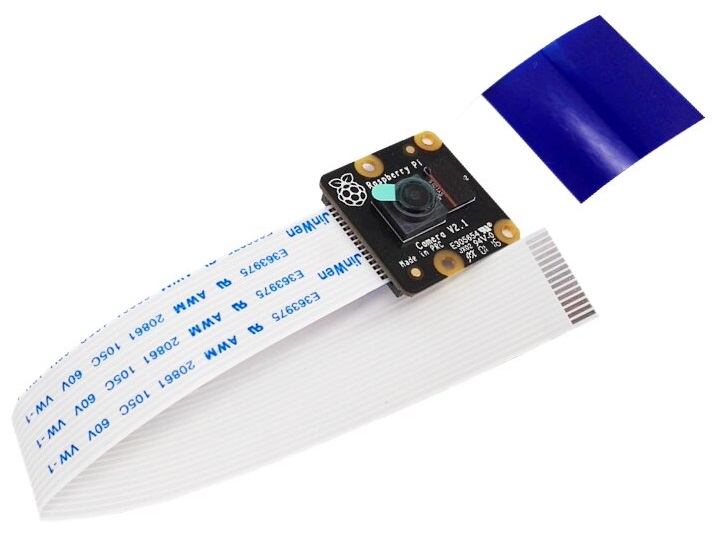

Al momento de escribir, el segundo mes estoy esperando el soporte para la cámara en la cabina. Hasta ahora, la máquina solo muestra el techo)
La luz
La máquina ya ha instalado luz regular, que consiste en faros con 2 LED amarillos. Solo queda para alimentarlos.
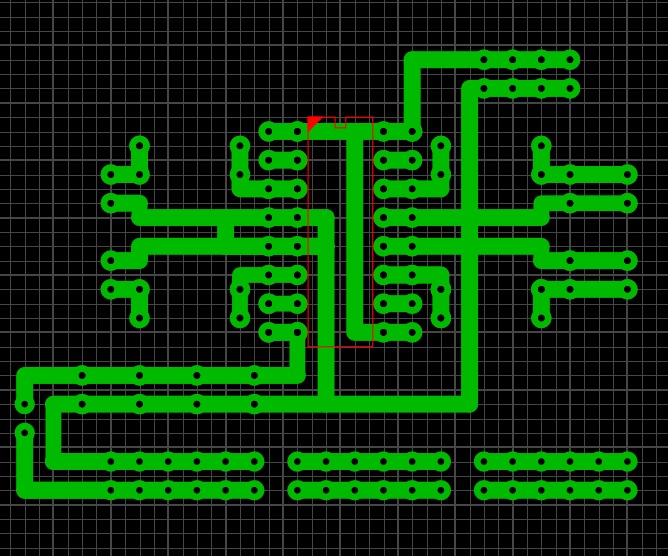
La luz se controla a través de mi placa, que se basa en el controlador L293. La energía a los diodos se suministra a través de una resistencia. El tablero está hecho con tecnología LUT. También tiene un montón de pistas para el cableado de alimentación.
Sería posible usar PCA9685 para controlar la luz, en el momento en que estaba haciendo lo mío no sabía sobre PCA9685 y podría prescindir de ella.
Placa de circuito:
Presentaré el diagrama de conexión general:
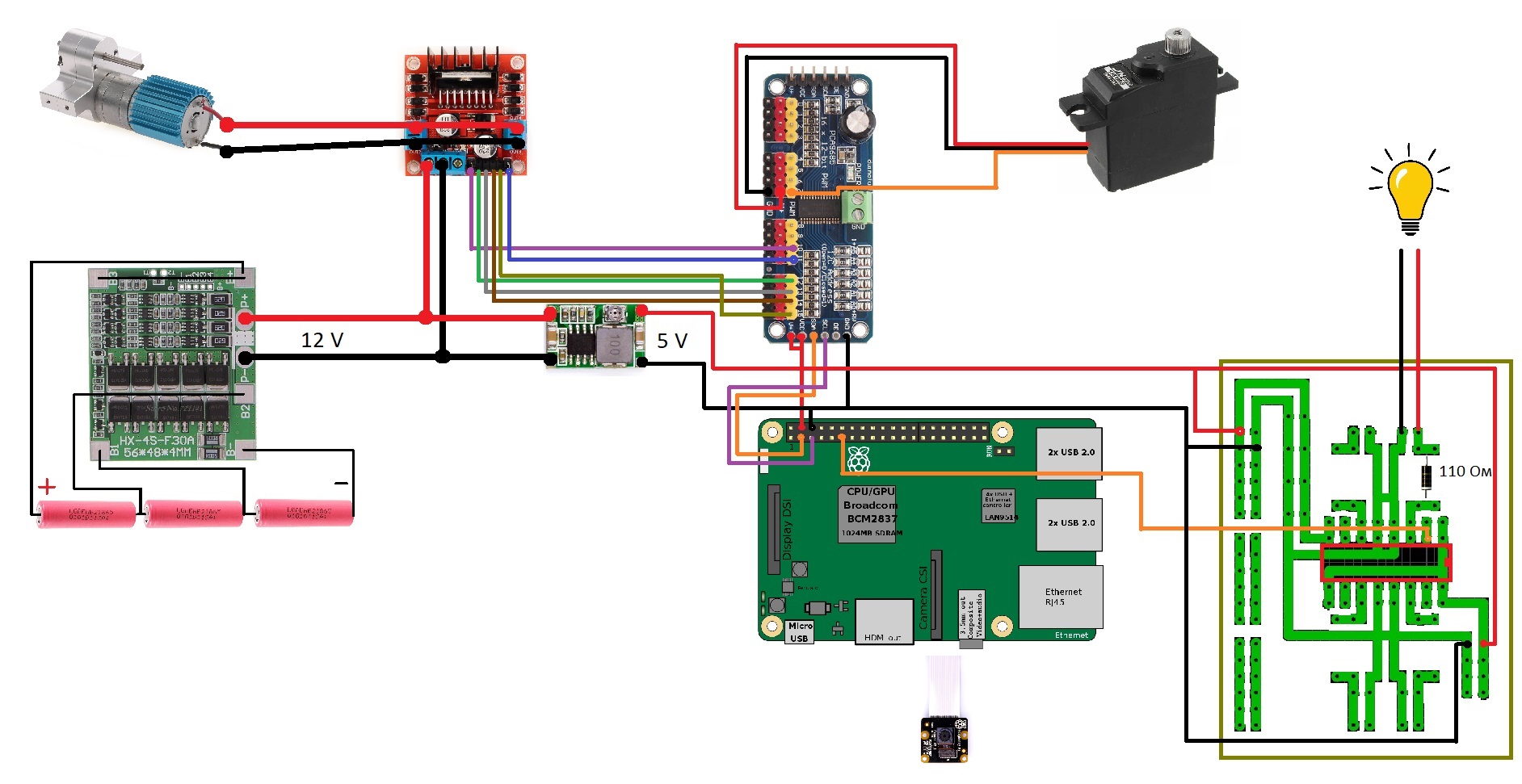
Pero esto es lo que estaba en la máquina de escribir hasta que subí))

Al momento de escribir, ya había comenzado a olvidar lo que estaba haciendo y cómo. Aunque no ha pasado más de un mes desde el montaje.
Todo está en hardware. En mi próximo artículo describiré la parte del software de cómo el hierro animado.
Gratitud
Mis colegas de trabajo: Andrei y Nikolai por ayuda con iron, Anton y Eugene por ayudar con el video. Samodelkin-22 para LUT de mi tabla. Y Murzik
Referencias
Parte 2
Parte 3