Para hacer que la captura robótica sea más confiable, los investigadores están desarrollando objetos que son lo más complejos posible de manipular.
 Inspirados en el concepto de imágenes competitivas, los investigadores de la Universidad de California en Berkeley estudian objetos físicos competitivos cuidadosamente diseñados para ser difíciles de capturar con agarres robóticos estándar.
Inspirados en el concepto de imágenes competitivas, los investigadores de la Universidad de California en Berkeley estudian objetos físicos competitivos cuidadosamente diseñados para ser difíciles de capturar con agarres robóticos estándar.Recientemente, ha aparecido una gran cantidad de investigación sobre el tema de las "imágenes competitivas", que son imágenes de objetos que se modifican para que sea especialmente difícil para los algoritmos de visión por computadora reconocerlos. La idea es utilizar estas imágenes para desarrollar algoritmos de visión por computadora más robustos, ya que su naturaleza "adversaria" es una opción especialmente implementada en el "peor de los casos", y si su algoritmo puede manejar imágenes adversas, entonces probablemente manejará otras tareas
Investigadores del Laboratorio de Automatización e Ingeniería (
AUTOLAB ) de la Universidad de California en Berkeley, dirigido por el profesor Ken Goldberg, han extendido este concepto a los robots. Diseñaron específicamente objetos físicos competitivos para que fueran difíciles de levantar con brazos robóticos convencionales. Solo es necesario corregir ligeramente las figuras tridimensionales habituales, y el agarre estándar con dos dedos se encontrará con todo tipo de dificultades, tratando de agarrar adecuadamente el objeto.
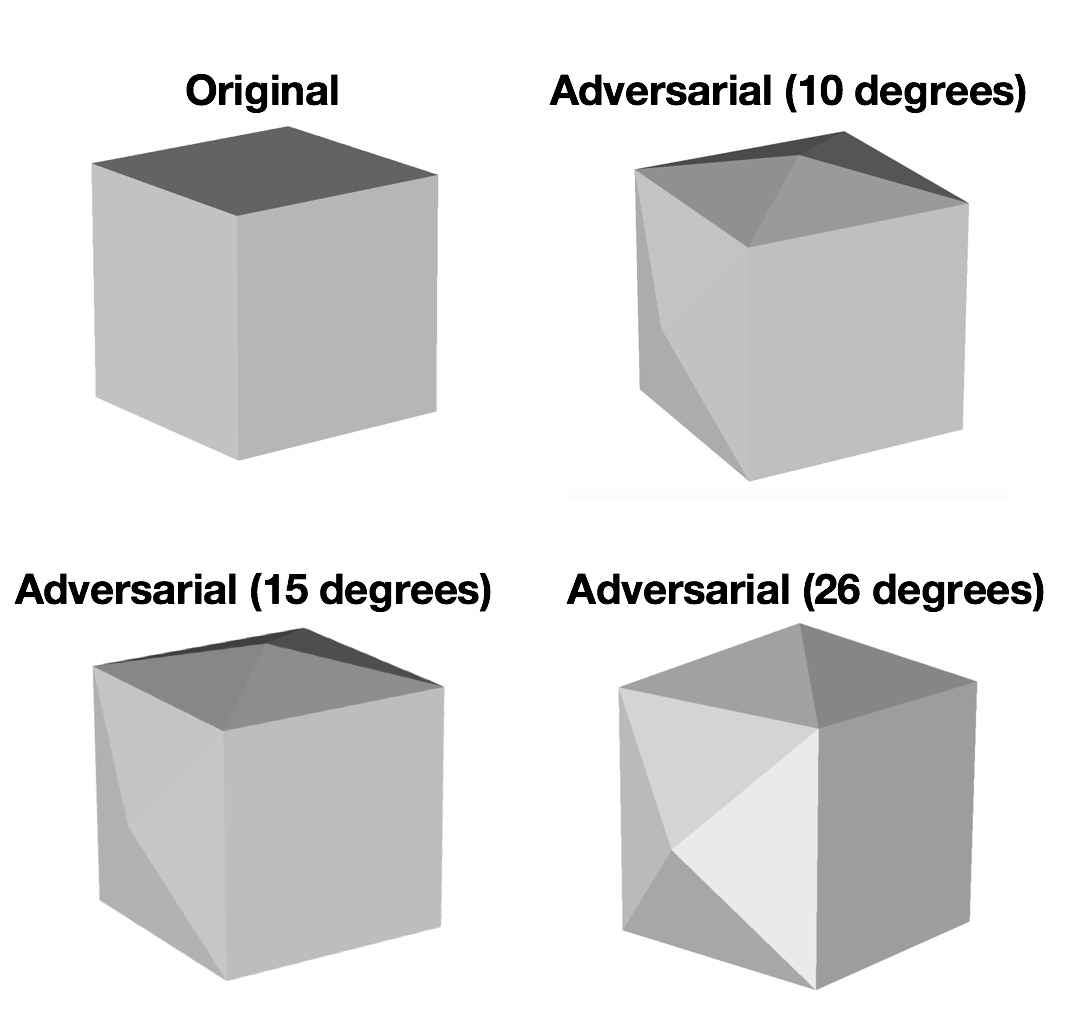 Comenzando con el cubo, el objeto adversario evoluciona, volviéndose cada vez más difícil de capturar con dos dedos: cuando intenta apretar una superficie angular, el objeto gira y se desliza.
Comenzando con el cubo, el objeto adversario evoluciona, volviéndose cada vez más difícil de capturar con dos dedos: cuando intenta apretar una superficie angular, el objeto gira y se desliza.La característica principal de estos objetos competitivos es que parecen fáciles de agarrar, pero con al menos una abrazadera de dos dedos, resulta difícil. La diferencia entre cómo se ven los objetos y su geometría real es insignificante: en un ejemplo, este es un cubo con pirámides bajas en tres de los seis lados: el más pequeño de ellos tiene un ángulo de inclinación de los bordes de solo 10 grados. Y frente a cada pirámide hay una cara plana ordinaria, por lo tanto, el cubo no tiene caras planas opuestas. Debido a esto, los agarres de dos dedos que trabajan en la abrazadera de los objetos encuentran problemas, porque si intenta sujetar la superficie en ángulo, la fuerza de compresión hará que el objeto gire, y a menudo se caerá de la abrazadera.
 La captura paralela con contactos puntuales captura con éxito un cubo regular (izquierda) y no puede hacer frente a un cubo competitivo desarrollado por investigadores (derecha)
La captura paralela con contactos puntuales captura con éxito un cubo regular (izquierda) y no puede hacer frente a un cubo competitivo desarrollado por investigadores (derecha)Los planificadores de captura a menudo buscan superficies opuestas lisas que se pueden sujetar, y dado que la diferencia entre un cubo competitivo y un cubo regular es lo suficientemente pequeña como para que un sensor 3D no se vea, la mayoría de los sistemas robóticos pensarán: “Oh, mira, este es un cubo, es muy fácil ! " Y luego seguramente fallarán en la tarea cuando el cubo salga y se salga de su agarre.
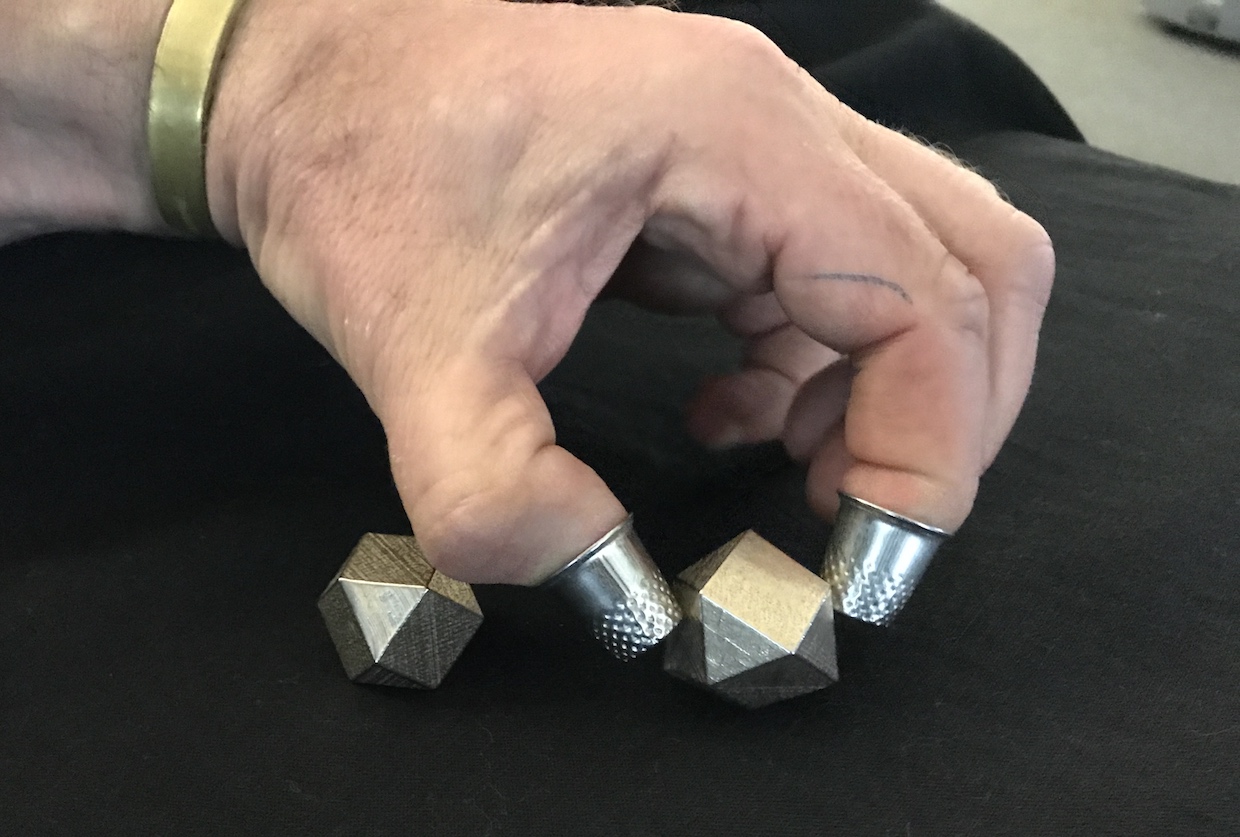 Las formas adversas también funcionan en humanos: usando dedales que emulan el acero frío e insensible del robot, y usando dos dedos para sujetar el objeto, los investigadores confirmaron que es difícil levantar estos objetos.
Las formas adversas también funcionan en humanos: usando dedales que emulan el acero frío e insensible del robot, y usando dos dedos para sujetar el objeto, los investigadores confirmaron que es difícil levantar estos objetos.Con la creciente complejidad de la forma, se hace cada vez más difícil desarrollar una versión competitiva. Tomando el cuboctaedro (un poliedro con ocho caras triangulares y seis caras cuadradas), los investigadores cambiaron aleatoriamente los vértices de la figura (en la simulación) hasta que obtuvieron una forma que no tiene caras directamente opuestas. Y para formas más complejas, como cilindros de intersección, se obtuvieron ejemplos competitivos utilizando el algoritmo de aprendizaje profundo.
 Para formas más complejas, como cilindros de intersección, se obtuvieron ejemplos competitivos utilizando algoritmos de aprendizaje profundo
Para formas más complejas, como cilindros de intersección, se obtuvieron ejemplos competitivos utilizando algoritmos de aprendizaje profundoEn
pruebas preliminares en el mundo real, la captura de puntos paralelos intentó levantar algunos de estos objetos controvertidos. En cada caso, la probabilidad estimada de capturar el objeto fue del 100% (según la política
Dex-Net probada en la simulación), pero de hecho resultó que las capturas exitosas de cubos competitivos y cuboctaedros fueron exitosas solo en el 13% de los casos.
Los investigadores dicen que planean probar estos objetos con varios tipos de agarres, así como con agarres de vacío, para ver si pueden crear los objetos más competitivos de todos. Y recuerde que el objetivo de todo esto no es solo engañar a los desafortunados algoritmos de captura, sino desarrollar herramientas que ayuden a que la captura robótica funcione de manera suficientemente confiable (con suerte) para el mundo real.