Buenas tardes Como saben, las carreteras en Rusia están lejos de ser las mejores y, por lo tanto, el desarrollo y la programación de bloques de suspensión activos para automóviles que se adaptan al tipo de superficie de la carretera al elegir un modo de operación o algoritmo sigue siendo relevante.
Daré una serie de diagramas eléctricos y recomendaciones.
Primero debe decidir el tipo de microprocesador: un microcontrolador. Le aconsejo que elija un microcontrolador STM de 32 bits rápido y moderno o similar, la mejor opción de Infineon.

Uno de los factores más importantes y la clave para la confiabilidad del circuito es el diseño correcto de la fuente de alimentación y el arnés. Le aconsejo que use reguladores LDO multicanal en diseño de microprocesador con un bus serie SPI para controlar los modos de energía, apagado de emergencia y monitoreo (buena energía).

A continuación, procedemos al desarrollo de la "unidad de potencia". Diseñamos un esquema de control para elementos elásticos - amortiguadores:
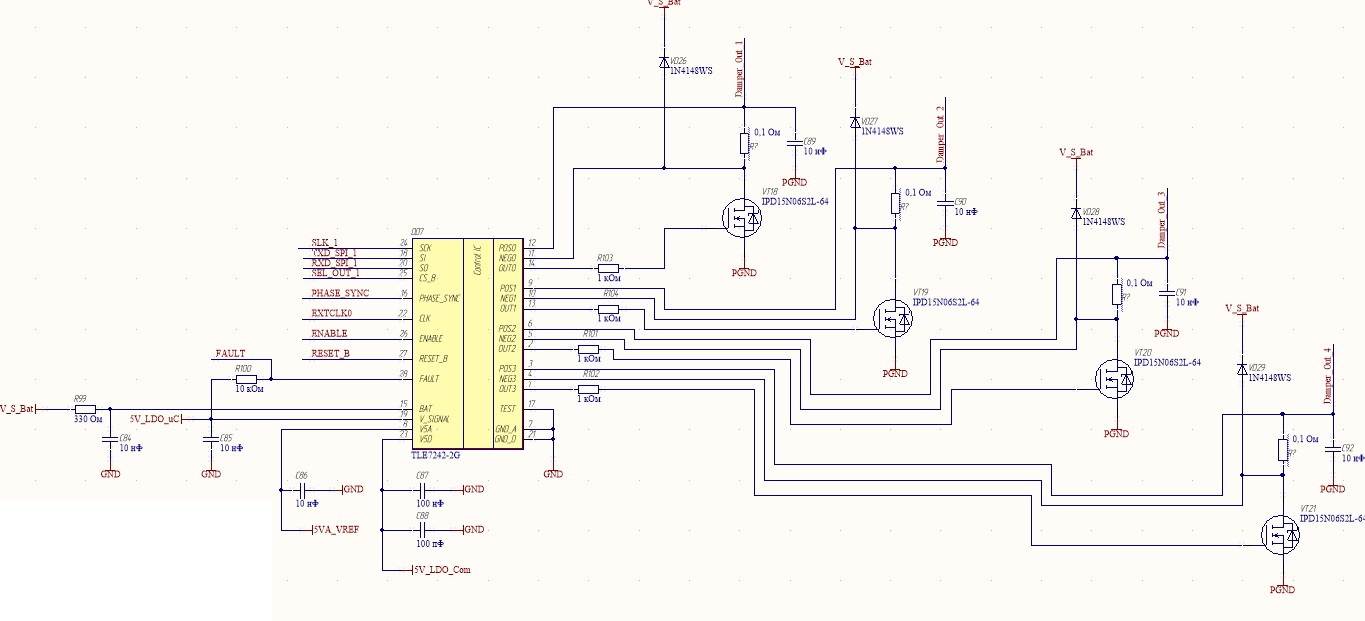
Es mejor elegir chips especializados certificados para la industria automotriz, por ejemplo, TLE7242 Infineon. Contiene los circuitos de control MOSFET para sobrecargar los circuitos de salida Drain-Source.
Para las válvulas de control de la bomba de aire, las llaves inteligentes deben usarse con protección incorporada contra el aumento de temperatura, cortocircuito de carga y sobretensión:
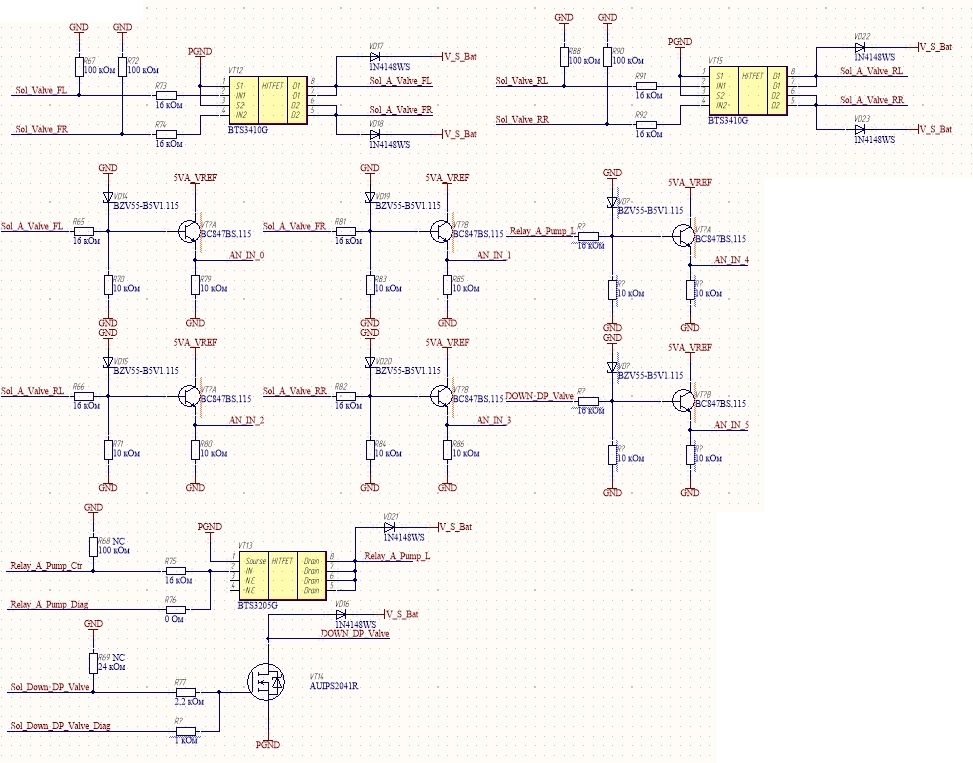
y válvulas de bomba de aire Air_Valve_Pump:

Después de diseñar la "unidad de potencia", procedemos al desarrollo de circuitos eléctricos para conectar sensores de aceleración. Elegimos el protocolo para la transmisión de datos en serie a través de la interfaz I2C debido a la simplicidad comparativa de la programación, una línea de dos hilos y una baja frecuencia de transmisión de información. Asegúrese de proteger contra el voltaje de entrada de la red de +12 V y la inversión de polaridad tirando de él a los circuitos de alimentación de diodos + 5V, + 12V y TVS. Utilicé multiplexores Analog Devices para conmutación secuencial de canales:

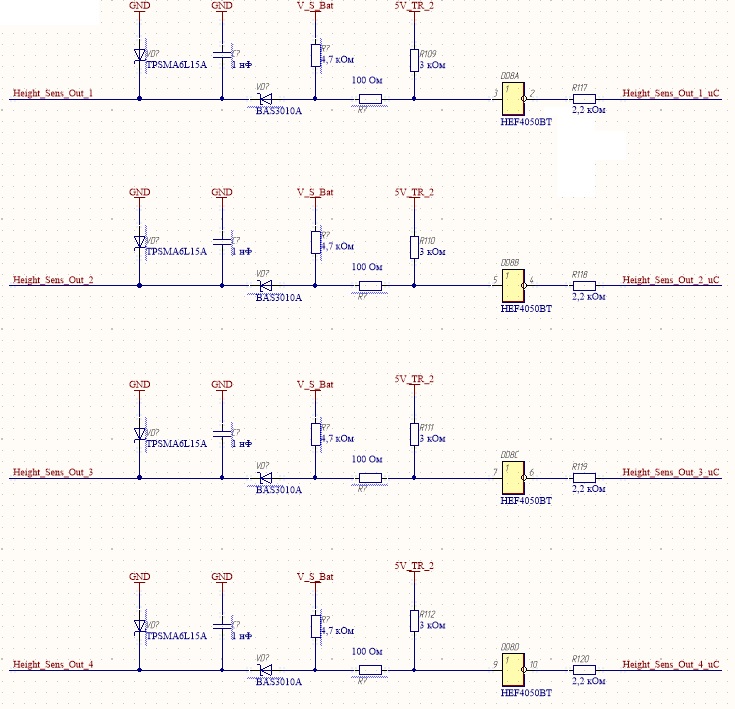
El diagrama de conexión de los sensores de altura es bastante simple, el microcontrolador lee la información en los pines de E / S en el borde ascendente:
Para configurar y calibrar la unidad, se utilizan dos transceptores CAN independientes, fabricados en chips TLE6250 con protección ESD incorporada. Para proteger la línea de transmisión diferencial, también instalé supresores PESD2CAN.
Algunas palabras sobre la programación de bloques. El código fuente está escrito en C para la comunicación entre nodos de bajo nivel y protocolos de comunicación: SPI, I2C, CAN. Para controlar el bloque desde el nivel superior, el programa MatLab & Simulink traduce las principales variables a través del compilador de C y las funciones integradas del paquete matemático.