Mi historia es la inmersión en el estudio de la robótica y la creación de un robot con una impresora 3D. Errores que encontré y lo que me gustaría recibir como resultado
Antecedentes
Hace unos 10 años, en los primeros cursos de la universidad, aprendiendo sobre la existencia de Arduino y aprendiendo a ordenar productos de China, me ordené un kit de inicio Arduino Mega y comencé, como todos, a aprender a parpadear un LED. Me encantó el hecho de que no solo puedo programar y obtener algunas soluciones en la pantalla de la computadora, sino que puedo hacer algunos dispositivos que pueden hacer la vida más fácil. Comencé a pensar en IOT antes de aprender sobre ese concepto y de vez en cuando pensaba implementar cosas tan útiles. El primer proyecto en Arduino, que consideré completado para mí, fue un controlador para un terrario con una araña. Pantalla, varios botones para control, sensor de temperatura y humedad DHT11, automatización de la retroiluminación, calefacción con un cable de incubadora y todo. Ya tenía experiencia trabajando con pascal en la escuela, me gustaba programar, pero no quería conectar la vida directamente con eso, era aburrido para mí, y obviamente fui a estudiar en la especialidad de ingeniería, o más bien, Tecnologías de Diseño de Información en NTU "KhPI" .
Prometieron una dirección súper avanzada, tecnologías avanzadas, dijeron cuánto demandaban tales especialistas y los atrajeron con imágenes brillantes de cálculos en Ansys, Solidworks y otros sistemas de software. De hecho, ahora, 6 años después de la graduación, puedo decir que no me arrepiento ni un poco de haber elegido esta dirección por mí mismo. Muchas cosas, por supuesto, no fueron como se describieron en la admisión, pero en el tercer año, sin embargo, esperé los artículos que me gustaron. Me interesé en estudiar sistemas CAD, en una de las Olimpiadas recibí un certificado CSWA de Solidworks, sin esforzarme en absoluto y sin prepararme para esto. Pero después de graduarme, recibí una oferta sin experiencia y conocimiento especial en programación para el puesto de desarrollador de .NET para proyectos relacionados con la integración de complementos en Solidworks. Luego de 6 años de trabajo con .NET en varias compañías con diferentes direcciones, un intento de trabajar de forma remota con criptomonedas, etc. pero todo no me trajo placer. De vez en cuando, me di cuenta de que me gusta el proceso de automatización de los procesos cotidianos, pero no se me ocurrió nada para hacerlo, no solo para jugar, sino algo real y útil. Pasaron los años, la universidad continuó durante varios años, no hubo tiempo libre, pero de alguna manera, en la víspera de la reparación, decidí que esta oportunidad era aplicar mis conocimientos e intentar hacer algo realmente útil, y comencé a desarrollar una casa inteligente. Actualizó un poco el conocimiento sobre la situación actual de los microcontroladores en el mundo, se enteró de la existencia de ESP8266 con Wifi a bordo, la una vez ucraniana Blynk, que permite obtener aplicaciones condicionalmente gratuitas para controlar un dispositivo desde un teléfono, sin experiencia y conocimiento sobre el desarrollo de software para teléfonos. Unos meses más tarde recibí un prototipo montado en una placa de pruebas, pero funcionó de manera estable. Por primera vez, para probar, lo dejé en forma de módulos atornillados en las cajas de distribución. Me gustaría escribir que después de las pruebas en condiciones reales extendí el tablero y ensamblé todo bien, pero no, por tercer año todo ha funcionado de manera estable, por lo que no estoy tratando de rehacer nada. Por lo que fue útil para mí en esto, tuve la oportunidad de ahorrar electricidad automáticamente, incluidos los principales consumidores, como una caldera, lavavajillas, lavadora a precio nocturno. Monitorear la temperatura en cada habitación y, en consecuencia, controlar la calefacción en cada habitación. Allí también implementó un controlador para la calefacción por suelo radiante y el alumbrado público. Hace 3 años, toda esta solución me costó alrededor de $ 50, dado el hecho de que solo cuesta un controlador normal para un piso cálido. 3 años de operación de todo este sistema me dieron la confianza de que los microcontroladores realmente se pueden usar para el desarrollo y pueden funcionar de manera estable.
Los primeros intentos de construir un robot.
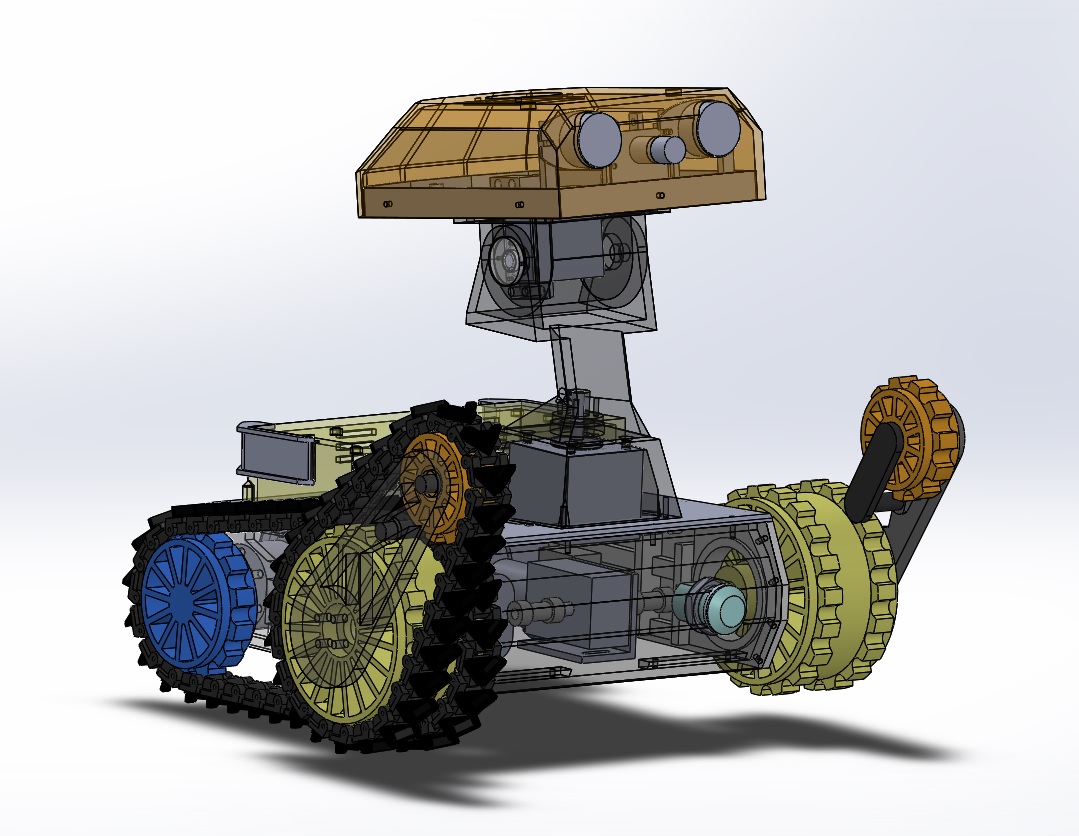
Hace unos años, todavía decidí y asigné un presupuesto para un pasatiempo comprando una impresora 3D. El clon de madera contrachapada de Ultimaker comenzó a terminarse inmediatamente a mano, las puertas y la caja de acrílico para imprimir ABS se completaron, y comencé a comprender que con la impresora ya era posible desarrollar algo más serio, móvil e interesante para mí. Al recordar las transmisiones de la infancia en la televisión con las batallas de los robots, decidí, ¿por qué no hacer algo interesante? Fui al festival de robótica, entusiasmado con esta idea aún más. Comencé a ver proyectos robóticos en thingiverse y me di cuenta de que todo estaba mal, los desarrollos de otras personas eran en su mayoría aburridos y ordinarios, la falta de código fuente y aún "YAGENZHENER". Quería algo con una mecánica inusual, y no solo una distancia entre ejes. Quería implementar una mecánica similar a un robot al cargar Solidworks.
 El mismo robot que se convirtió en uno de los inspiradores.
El mismo robot que se convirtió en uno de los inspiradores.Miré diseños similares, entendí el principio del trabajo y tuve en cuenta la idea de hacer algo similar. El primer error importante fue la decisión de que todo es simple, gradualmente modelaré, imprimiré y comprobaré el diseño terminado, sin tener una idea completa de qué y cómo se organizará, cómo se administrará, qué módulos se utilizarán. Qué equivocado estaba. Inicialmente, entendí que el robot se convertiría en una "excrecencia", planeé que este robot usara todo tipo de reconocimiento de objetos usando OpenCV, algún tipo de navegación, estacionamiento automático para la carga, no manejarás un ESP allí. Inicialmente, se planteó la idea de utilizar ESP32 para trabajar con mecánicos y RaspberryPi3 para trabajar con lógica, cámara, sonido, etc. Una de las condiciones necesarias para mí era la recarga automática, así que tuve que descubrir cómo vender energía. Como no tenía mucha experiencia en electrónica / ingeniería eléctrica, al principio traté de usar una apariencia de Powerbank con la capacidad de trabajar en modo UPS. Trabaje desde la batería (en mi caso, 8 elementos de 18650) cuando no hay alimentación externa y recargue los mismos elementos y trabaje desde la red cuando el robot se estacione para cargar. En general, hubo muchos intentos de poner todo junto y hacerlo funcionar, pero me di cuenta de que necesitaba aprender el material o buscar ayuda. Debido a los cambios constantes de todos los módulos y placas, todo ya no cabe en el cuerpo del robot y en algún momento me di cuenta de que era hora de rehacer todo.
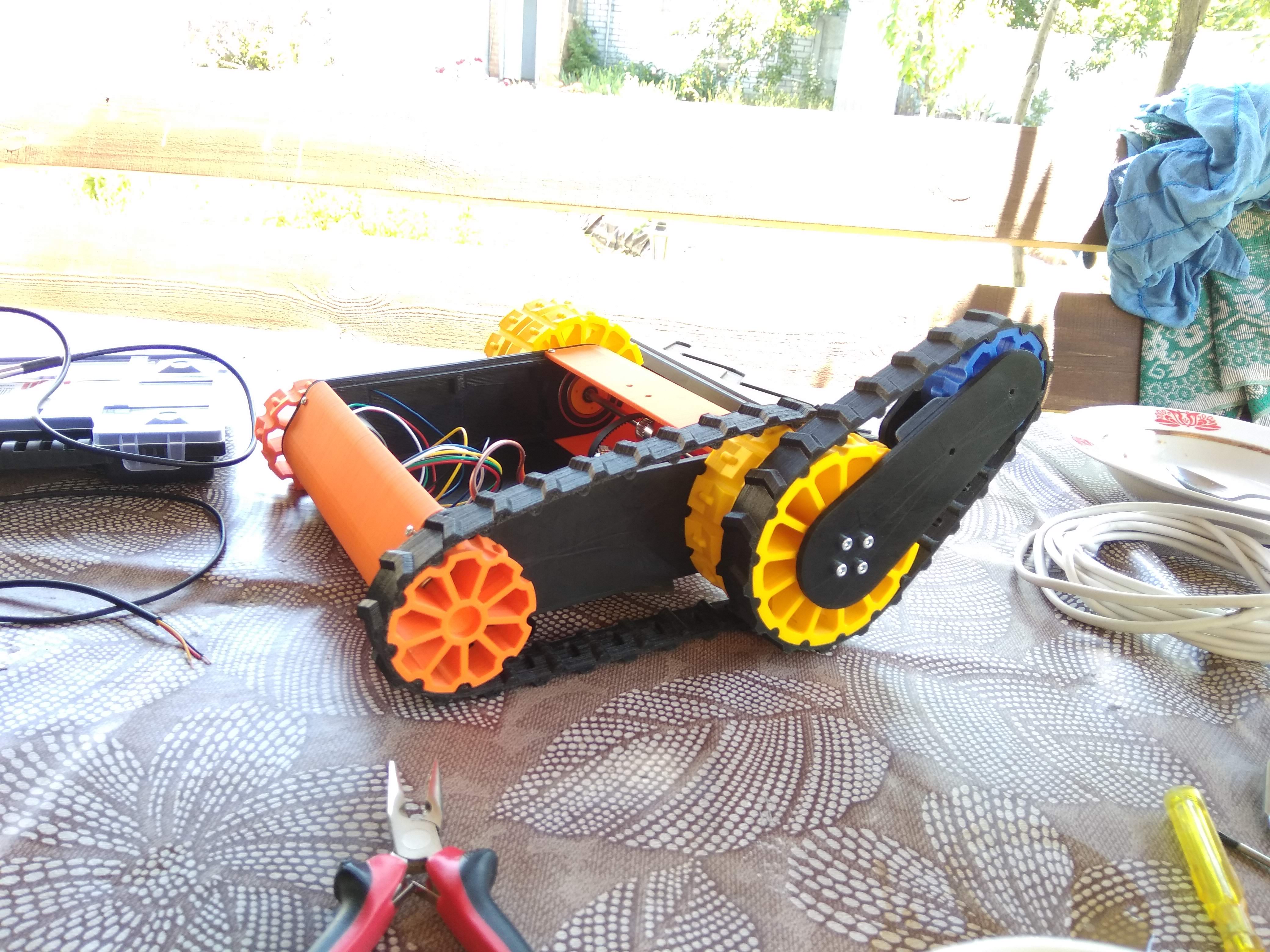 La primera versión del diseño con pistas impresas con una correa y un servo para girar el frente de las pistas.
La primera versión del diseño con pistas impresas con una correa y un servo para girar el frente de las pistas.Primer trabajo sobre errores
Después de participar en un seminario web sobre robótica, conocí a una persona que desarrolla placas de circuito y decidí por mí mismo que es más fácil para mí esbozar algún tipo de especificaciones técnicas y obtener algún tipo de solución de una persona que conozca el diseño de la placa y el desarrollo de dispositivos. Al mismo tiempo, comencé a trabajar en un nuevo edificio sobre mirar las jambas de mi puerta la última vez. Y aquí, una vez más, pisé el mismo rastrillo hasta el final sin comprender cómo se verán todos los componentes electrónicos, qué dimensiones tendrá y cómo lo colocaré todo. Discutimos que esta sería una solución modular, tenía algunas placas, por ejemplo, controladores de motor, baterías, y comencé a volver a simular el proyecto, pero ya extraía completamente cada placa con agujeros de montaje, salidas de cables, radiadores, etc. así que de nuevo no toparse con el problema de la falta de espacio. De hecho, estaba limitado por el tamaño del área de impresión a 200 * 200 * 200 mm, y traté de hacer esta versión del estuche con una sola parte, que tomó alrededor de 400 g de plástico y varios días para imprimir.
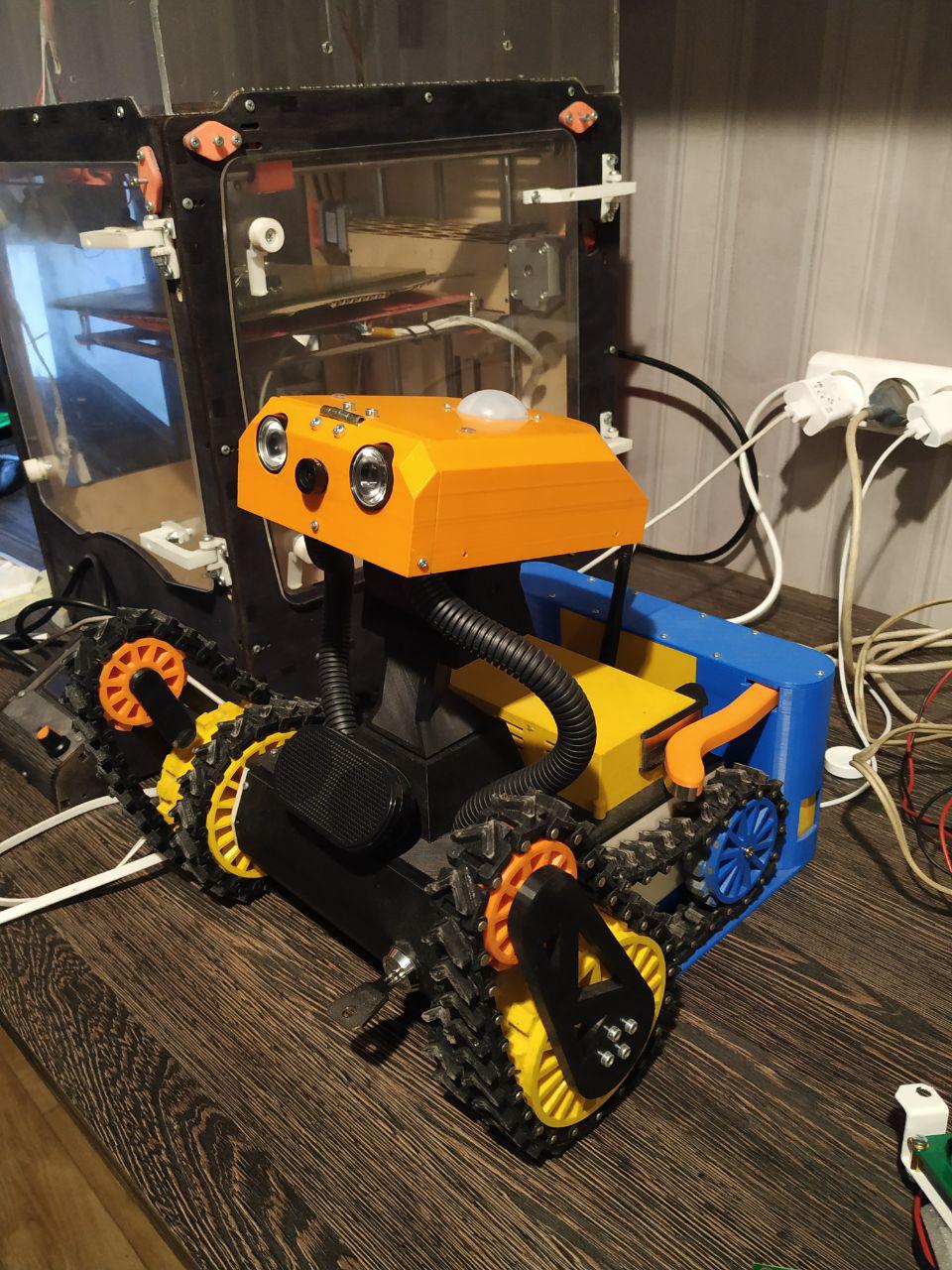
Después de varios intentos con grietas en el segundo día, separándome de la mesa, me di cuenta de que el edificio prefabricado no es una mala idea. El proceso de rehacer algunas de las partes llevaría mucho menos tiempo y los problemas con la impresora serían mucho menores. Después de recibir un conjunto de tableros divorciados con todos mis deseos a lo largo del tiempo, aprendí a trabajar con registros de cambios, multiplexores, y al menos de alguna manera comencé a comprender los circuitos y dispositivos que me resultaban incomprensibles. Para ese entonces, una vez más había rehecho completamente la mecánica. Cambió el principio de rotación de las "patas" delanteras de un servomotor a un motor de engranaje helicoidal. Dejó la idea de imprimir cinturones para orugas a partir de un elastano similar al caucho y los convirtió en pistas de plástico prefabricadas ordinarias ensambladas en clavos y pegadas con bandas de elastano. Inicialmente, se pensó un sistema de ventilación, que tomaba aire por detrás desde el robot, a través del sistema de ventilación que pasaba por todas las tablas, tubos en los que los cables se enroscaban en la "cabeza" y expulsaban el aire caliente. Y este sistema de ventilación incluso funcionó en algún momento, pero luego todo fue reconstruido nuevamente, por lo que me fue más fácil imprimir la cubierta con un montón de ranuras y ventilación pasiva.
¿Qué es en este momento?
El fin de semana en Dnepr, se celebró el festival técnico Interpipe TechFest, en el que decidí mostrarle a la gente lo que tengo ahora, escuchar las opiniones de los demás y hablar con odnodumtsami. Allí, una vez más, escuché que sería posible escribir en algún lugar, por ejemplo, sobre Habré y obtener comentarios de la gente.
De hecho, para mí esta es una plataforma en la que aprenderé a trabajar con ROS, intentar navegar en el espacio, reconstruir el castigo, tratar de trabajar con un lidar de estado sólido, que estoy esperando de kickstarter, quiero atornillar algo como una cámara estéreo con sentido real. Entiendo que el cerebro de la frambuesa probablemente no sea suficiente para mí y con el tiempo cambiaré a algo más poderoso.
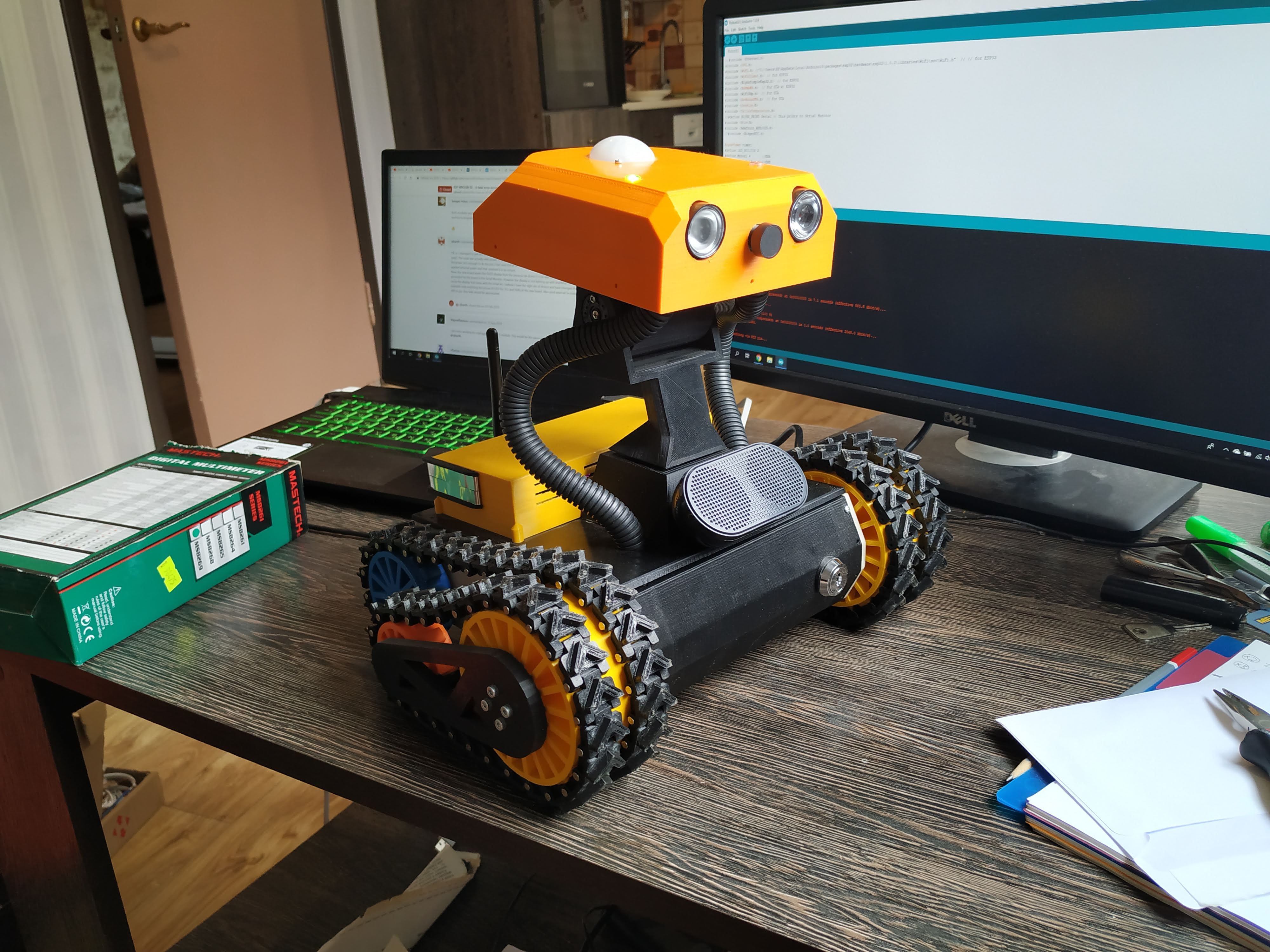
Ahora este robot se puede utilizar como "vigilante doméstico". Si bien la gestión se organiza a través de la misma aplicación Blynk. Está equipado con un sensor de movimiento de domo, una cámara con la capacidad de encender / apagar el filtro IR, iluminación IR. Después de activar el modo de protección desde el teléfono, recibo una notificación por teléfono. Puedo encender RaspberryPi 3, comenzar a transmitir, transmitir + grabación de video, tomar fotos que se envían a mi correo. Puedo ir a ver qué pasa allí en casa y volver a la estación de carga.
La batería 4s2p autoensamblada de los módulos 18650 a 3200 mAh me da aproximadamente 8 horas de manejo sin recargar con todo el equipo encendido y la transmisión de video y sin ninguna optimización del ahorro de energía. Hasta ahora, las manos no han llegado a esto. Usando Google TextToSpeach, escribiendo en el terminal de esta aplicación, el robot lee el texto. Y eso es todo desde cualquier parte del mundo donde tengo conexión a Internet.
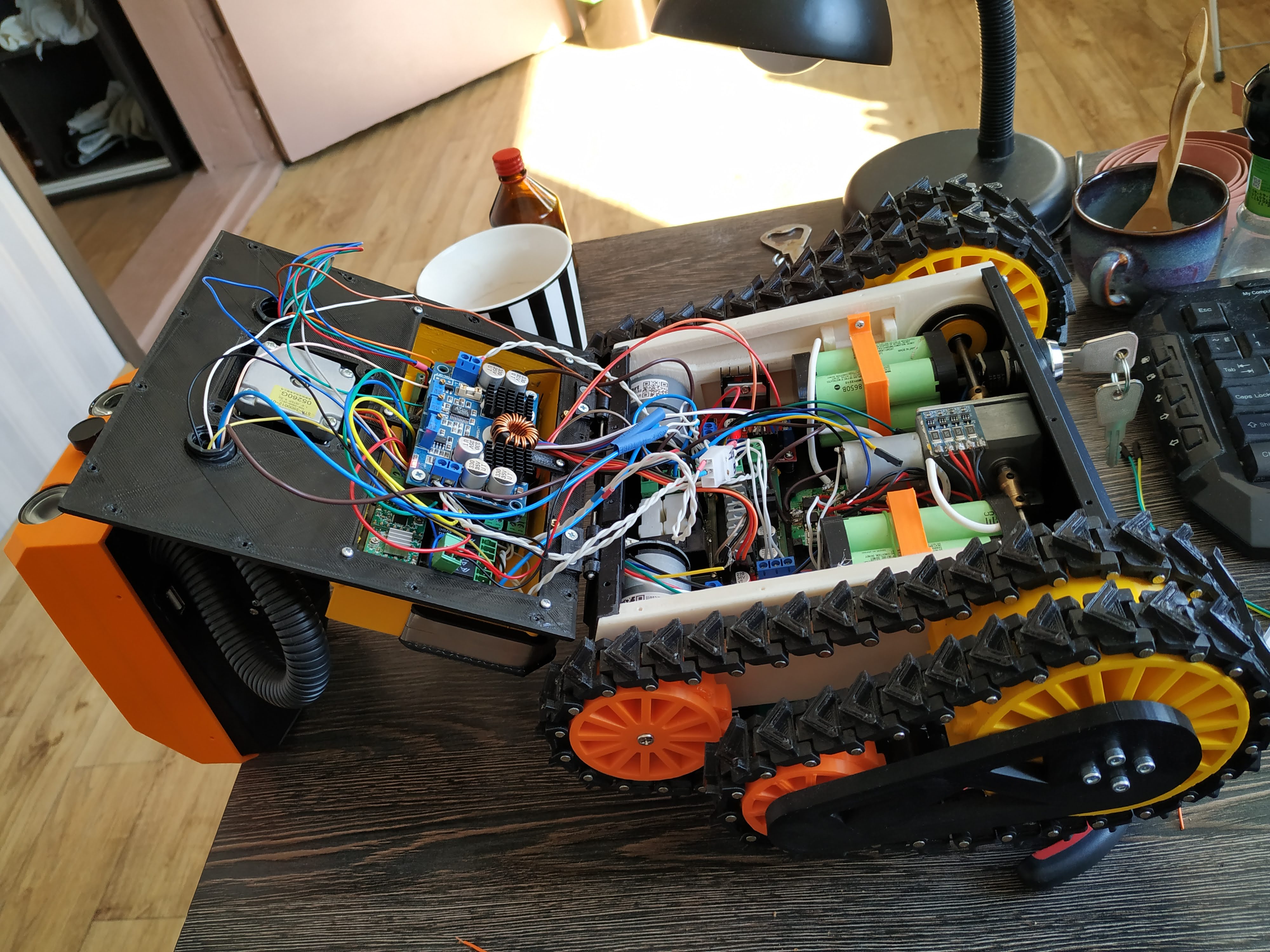 Un poco de estaño adentro
Un poco de estaño adentro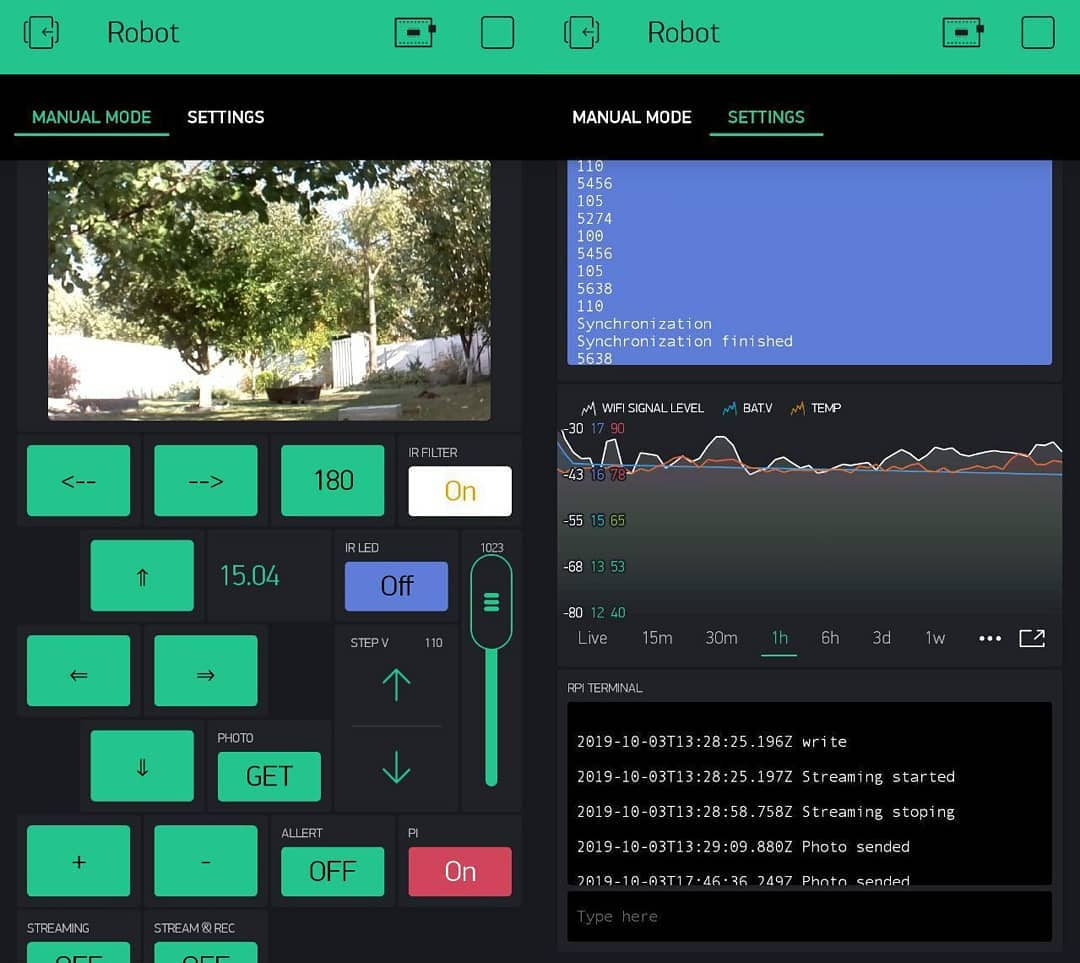 Así es como la UI controla el teléfono
Así es como la UI controla el teléfono¿Qué sigue y por qué escribo todo esto?
En general, el propósito de visitar la exposición era encontrar nuevos conocidos con odnodumtsami, listos para comenzar a hacer algo relacionado con la robótica. Estoy cansado de trabajar solo como programador, escribiendo aplicaciones de escritorio, esto no es tan bueno como parecía una vez y creo que esta dirección se está doblando gradualmente. En lugar de volver a aprender para el desarrollo WEB, decidí cambiar radicalmente de dirección y conectar mi vida con la robótica y el IOT, que realmente me gusta. Por mi parte, decidí que mientras trabajaba en un trabajo no relacionado con esta área, no tenía suficiente tiempo. Tengo que elegir entre lo que necesito y lo que me gusta y quiero, ahorré algo de dinero, dejé el trabajo y comencé a estudiar todo esto.
Tengo varias ideas sobre el tema de la robótica, la principal de las cuales está relacionada con la agricultura, basada en visión por computadora, mapas de profundidad, reconocimiento de objetos, etc. Entiendo que hay mucho trabajo y ahora acabo de comenzar a tratar con ROS. Tengo conocimiento en ingeniería, la capacidad de trabajar con sistemas CAD / CAE y, en principio, puedo hacer todo por mí mismo, pero entiendo cuánto trabajo hay que hacer en mecánica, desarrollo, errores de cálculo y aprender completamente cómo trabajar con ROS, mapas de profundidad, sensores, orientación espacial y recordarlo todo será muy difícil. Por lo tanto, estoy buscando a varias personas. quienes están listos para participar seriamente en el trabajo en esta startup y convertirse en uno de los cofundadores. Por supuesto, no puedo prometer que todo estará bien y en medio año nuestra startup nos traerá mucho dinero, pero hasta que este nicho esté lleno, puedes intentar implementar algo al nivel del primer prototipo e ir a aceleradores, plataformas de crowdfunding y eso publicítate de alguna manera.
También estoy dispuesto a considerar propuestas en esta dirección. Estoy listo para trabajar con alguien en el inicio de alguien, o no necesariamente en un inicio, sino simplemente en el desarrollo de alguna empresa, pero en una dirección interesante para mí.
Por lo tanto, me gustaría escuchar cualquier comentario sobre este tema. Quizás, después de todo, esto interesará a alguien. Yo mismo vivo en la ciudad de Dnepr, Ucrania. En consecuencia, sería más correcto trabajar en un proyecto en proximidad relativa, aunque en cientos de kilómetros en lugar de miles, se están considerando todas las opciones.
Si hay alguna pregunta sobre el dispositivo de mi robot dado, estoy listo para responder y discutir. También en la página de Facebook hay varios videos del robot y su superación de obstáculos.
En todo caso, siempre puedes encontrarme aquí en
Facebook o escribirme en marchenko.andrii@gmail.com