 En un artículo anterior,
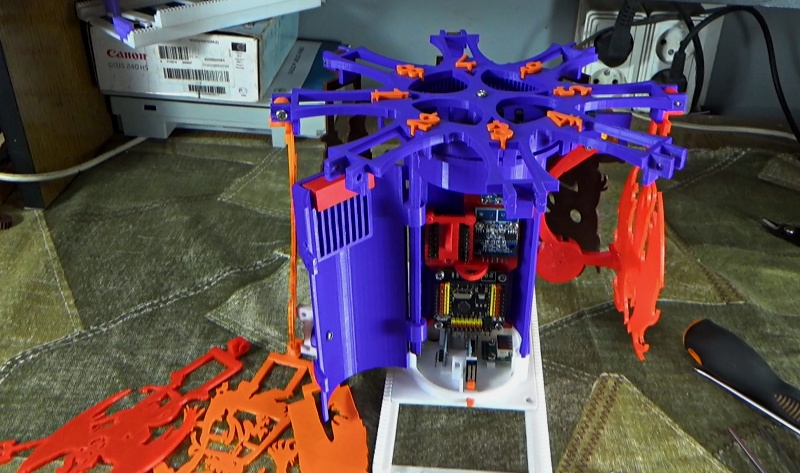
En un artículo anterior, hablé sobre mi nuevo desarrollo: el juguete robótico carrusel demoníaco. He refinado sustancialmente este modelo, y aunque el dispositivo aún no funciona (todavía tengo que escribir un programa), todavía tengo algo que mostrar y contarles. El diseño del objetivo ha cambiado seriamente, y el principio del campo de tiro se ha mantenido igual.
Todas las partes del campo de tiro se imprimieron en una impresora 3D, durante casi 50 horas, a una velocidad de 50 y una capa de 0.1 mm. La impresión podría ser más rápida, pero la calidad del dispositivo se vería afectada.
En la nueva versión del juguete, gasté unos 350 gramos de filamento. Pero, por supuesto, llevó mucho más desarrollar un modelo de filamento, teniendo en cuenta todas las pruebas y errores.
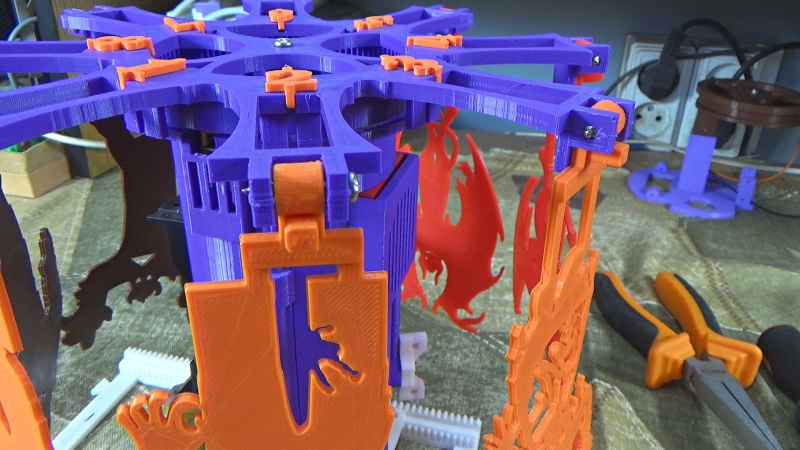
La nueva versión del soporte objetivo ahora se ve más elegante, además, tomó menos filamento que la versión anterior de este dispositivo. También gracias a esto, pude reducir el número de tornillos de dos a uno para unir cada uno de los ocho objetivos.

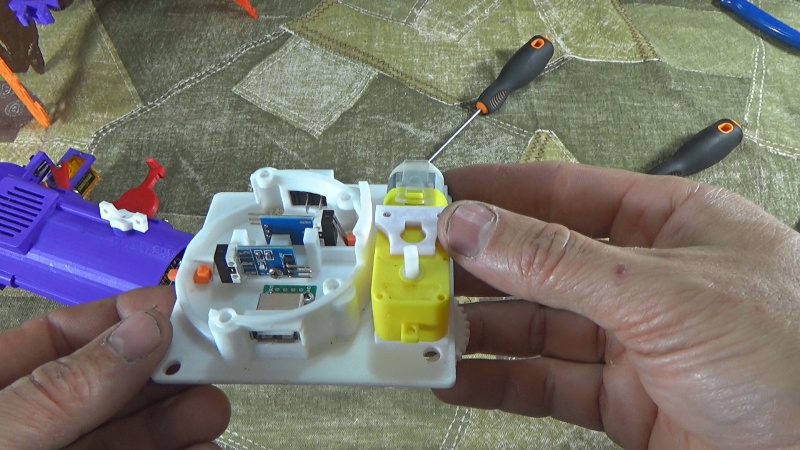
Para un posicionamiento preciso del objetivo, se implementa un engranaje cilíndrico con engranaje interno. Por lo tanto, evité las desventajas de la primera opción, donde el soporte del objetivo estaba montado directamente en el eje del motor.

Dos optoacopladores establecen el objetivo en la posición correcta debajo del dispositivo de elevación. Usar optoacopladores es una opción barata, por lo que no utilicé un sensor de posición magnético en este modelo, que cuesta unos siete dólares. También hice una versión de prueba, con un sensor de posición magnético, pero resultó que esto solo aumenta el costo de la estructura y no realiza ninguna mejora especial en el dispositivo.
Para que los optoacopladores funcionen en los lugares correctos, hay dos sectores en la parte posterior del soporte del objetivo. Un sector, con una posición, le permite determinar la posición inicial del objetivo. En el segundo sector hay ocho posiciones que determinan si hay un objetivo debajo del dispositivo de elevación.
El mecanismo del dispositivo de elevación con la ubicación del sensor de choque se mantuvo casi igual, aquí el diseño no ha sufrido cambios especiales.

Como no hay cuerpo en el banco de energía, el tablero del banco de energía se encuentra al final del soporte cilíndrico, que actúa como el soporte de toda la estructura objetivo. La desventaja del diseño es que necesita soldar el conector USB y el interruptor que se encuentran en la placa del banco, de lo contrario, el banco no entrará en su lugar.


No restringí el acceso a la batería de litio y la cubrí con el estuche, aunque esto se puede mejorar aún más: hay agujeros cuadrados especiales en el estuche para esto. Los tornillos se atornillan a través de estos agujeros para asegurar el banco de energía a la carcasa. Estas aberturas pueden ser un elemento de fijación para la carcasa que oculta la batería de litio.
Hay dos agujeros más en el caso. Uno de ellos le permite conectar la carga USB a un banco de energía, y el segundo sirve para controlar visualmente el estado de los LED.
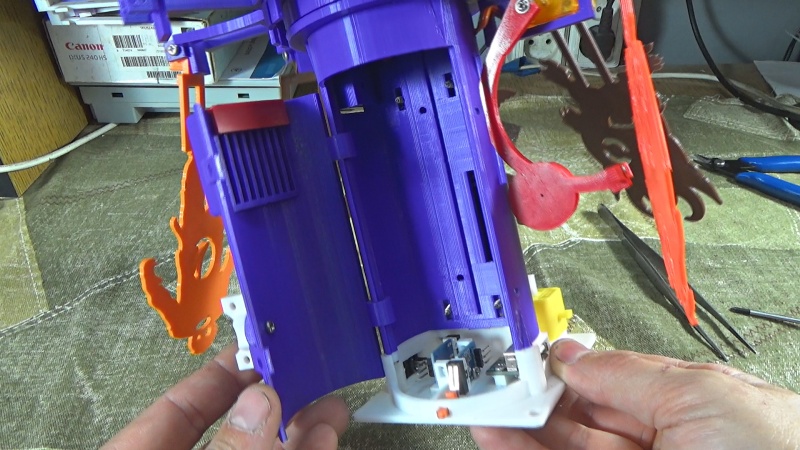
El soporte cilíndrico es hueco, por lo que todos los componentes electrónicos utilizados se pueden colocar dentro de él. Se proporciona una puerta especial para el acceso.
Las placas de los módulos utilizados, incluido el microcontrolador, se fijan al bisel con los tornillos cortos M3. Naturalmente, el panel falso está hecho de plástico, y también está unido al cuerpo con dos tornillos.
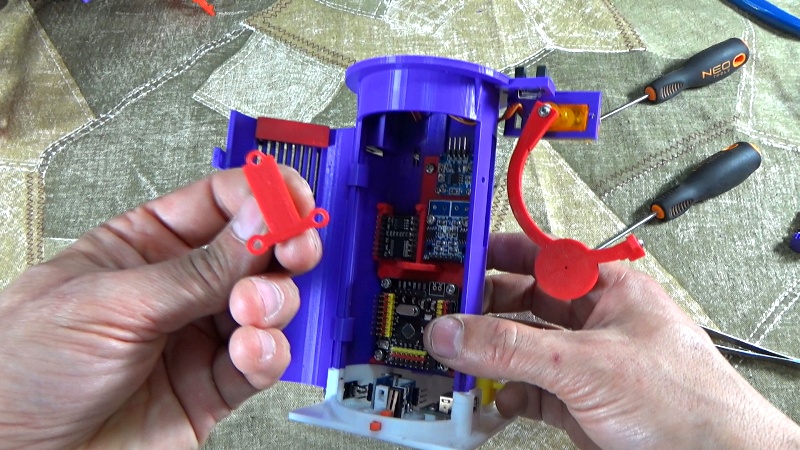
Una excepción fue el módulo de sonido, que no está diseñado para montaje con tornillo. Por lo tanto, el módulo de sonido se fija en un nicho especial. Por cierto, se necesita un altavoz para su uso, y se adapta perfectamente al diseño de la puerta.

Mejoré y la plataforma móvil. Los interruptores de límite para restringir el movimiento de objetivos en rieles ahora están ocultos dentro de la carcasa. La transferencia a los interruptores de límite desde las paradas de límite ubicadas en los rieles se realiza mediante pulsadores. Estos empujadores son dos tiras de plástico ubicadas en los nichos huecos de la carcasa del sitio.
El diseño de los empujadores diseñó un énfasis especial, que no permite que los empujadores se caigan de sus nichos.
En el futuro, planeo combinar otros dispositivos que aún no se han desarrollado a través de un conector USB. Hasta que comience a especificar qué tipo de dispositivos serán, solo puedo decir que serán proyectos muy interesantes.