
En agosto de 1913, Peter Nesterov realizó una de las maniobras más emocionantes, peligrosas y complejas de la aviación: el bucle muerto. En ese momento, especialmente teniendo en cuenta la tecnología de entonces, y ahora es una verdadera acrobacia aérea. Muchos profesionales modernos y aficionados del campo de la aviación darían todo para hablar con Nesterov. Desafortunadamente, esto no es posible, pero otros ases de acrobacias aéreas a menudo viven con nosotros y a menudo nos molestan. Como regla general, no los notamos o conducimos por el apartamento con una zapatilla o un periódico, porque para nosotros son plagas, portadores de cualquier infección y solo volantes molestos. Pero para los científicos, estas criaturas son los guardianes de los secretos del vuelo y el aterrizaje. Hoy nos reuniremos con usted para realizar un estudio increíble de la capacidad de las moscas comunes de aterrizar boca abajo en cualquier superficie. ¿Qué mecanismo de aterrizaje usan las moscas, en qué procesos consiste y qué tan difícil es implementarlo artificialmente en robótica? Aprendemos sobre esto del informe del grupo de investigación. Vamos
Base de estudio
Por supuesto, no puedes dar todos los laureles de superioridad en volar a las moscas, ya que muchos otros insectos también tienen sus habilidades únicas en el campo de vuelo y aterrizaje. Sin embargo, las moscas, por así decirlo, acumularon en sí mismas el número máximo de tales habilidades que están directamente relacionadas con su anatomía.
 Aspecto de una mosca de la especie Calliphora vomitoria.
Aspecto de una mosca de la especie Calliphora vomitoria.En este estudio, las moscas de la especie
Calliphora vomitoria (mosca azul) desempeñaron el papel principal. Esta especie se puede encontrar en casi cualquier rincón del planeta: desde América del Sur hasta el este de Asia. Las dimensiones de estas moscas son bastante impresionantes, de 10-14 mm de longitud, que es aproximadamente dos veces más grande que la de las moscas
domésticas comunes (
Musca domestica ). Externamente,
Calliphora vomitoria se puede distinguir de sus parientes por el abdomen azul, gracias a lo cual también se le llama la "
mosca de la botella azul", lo que insinúa una semejanza con el color del frasco de vidrio azul.
Además de las diferencias externas de las moscas domésticas,
Calliphora vomitoria también tiene moscas conductuales. Las moscas azules prefieren volar en un pequeño enjambre en lugar de hacerlo solo, lo que les permite encontrar comida rápidamente (por lo general, esto es néctar de flores con un fuerte olor). Cuando un individuo del enjambre encuentra comida, secreta una feromona especial, señalando el hallazgo a todos los demás.
Las personas a menudo usan larvas de moscas azules como cebo durante la pesca, pero para los insectos esta no es la aplicación más singular y, en verdad, no la más digna. No solo los pescadores encuentran favor en las moscas azules, sino también los forenses. Las moscas, como sabemos, no son aprensivas, porque los cadáveres de animales y personas no las asustan, sino que las atraen. Para los expertos forenses, este es un criterio adicional para estimar el momento de la muerte, ya que las moscas azules tienen una relación muy clara entre la tasa de crecimiento de sus larvas y la temperatura ambiente. Conociendo la temperatura, es posible determinar a partir de las larvas el momento en que se pusieron los huevos.
Pero hoy no hablaremos de medicina forense, sino de aviación. Estudio de ajuste invertido, es decir El aterrizaje en el techo, como lo llaman los científicos, se realizó antes, pero no con tanto detalle. Sin embargo, se descubrieron algunos matices interesantes. Durante las observaciones del aterrizaje invertido de las moscas domésticas, los científicos notaron que hacen movimientos de rotación "semicirculares" antes del contacto de las patas
ipsilaterales * con la superficie.
Ipsilateral * : ubicado en el mismo lado (exagerado, el brazo izquierdo de una persona es ipsilateral con respecto a la pierna izquierda).
Después de este movimiento, se produjo la oscilación lateral del cuerpo con la ayuda de las piernas, lo que condujo al contacto de las piernas restantes con la superficie. Estas y otras maniobras antes del aterrizaje real, por supuesto, se deben al sensor, es decir. Señales visuales, táctiles y de otro tipo recibidas por la mosca antes del aterrizaje.
En nuestro estudio de hoy, científicos de la Universidad de Pensilvania realizaron una serie de observaciones sobre el aterrizaje de moscas azules en una superficie invertida en una cámara de vuelo (en un túnel de viento) utilizando video de alta velocidad (
1A ).
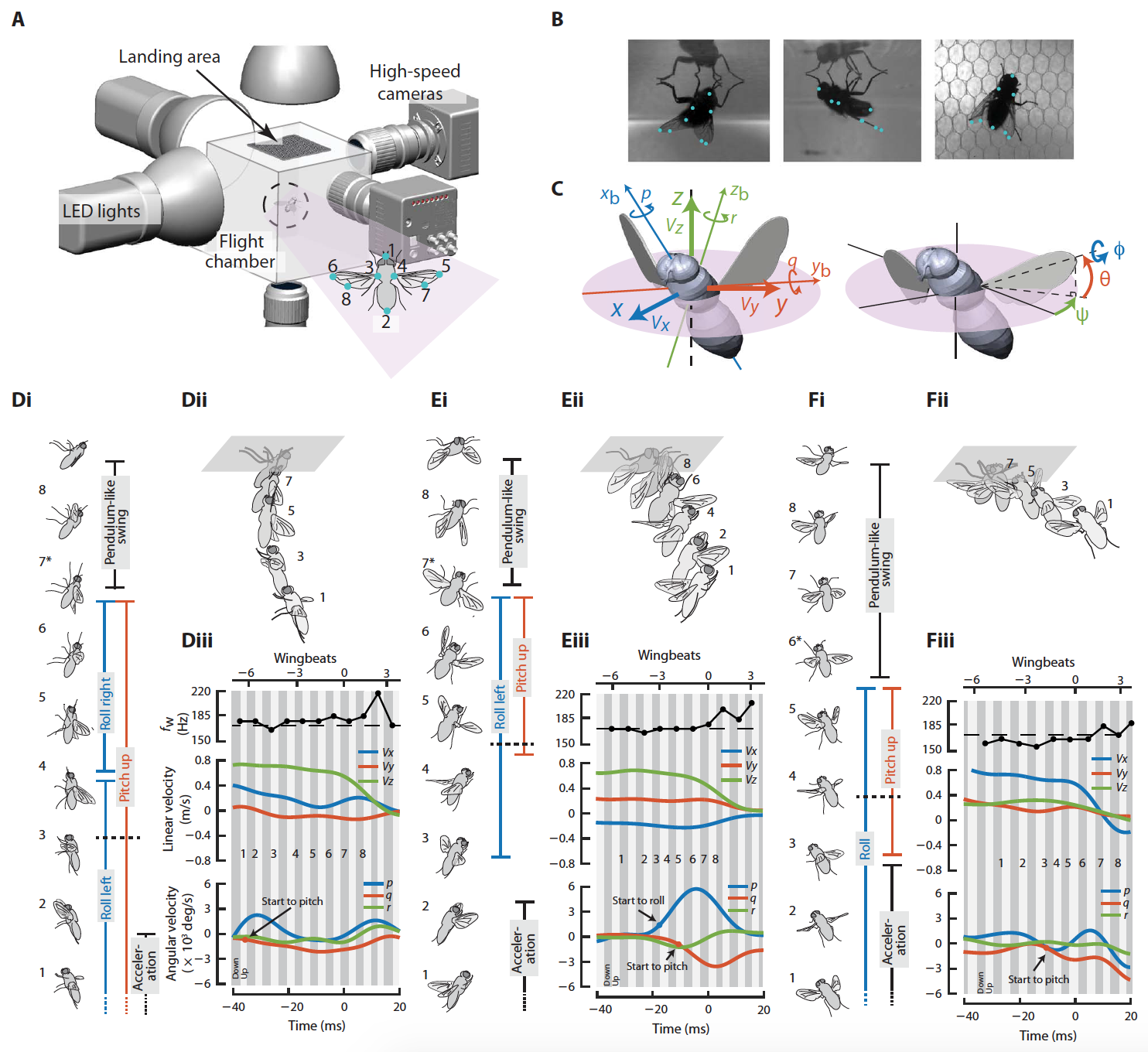 Imagen No. 1
Imagen No. 1La cinemática del cuerpo y las alas de las moscas se obtuvo digitalizando etiquetas anatómicas (
1B y
1C ).
Resultados de observación
En primer lugar, los científicos decidieron aislar y analizar los aspectos de comportamiento de un aterrizaje exitoso.
Señalan que las moscas de la fruta aterrizan en superficies verticales a través de una desaceleración continua y una ligera rotación del cuerpo antes de plantar. Pero las moscas azules durante el aterrizaje mostraron inmediatamente 4 aspectos de comportamiento consecutivos: aceleración vertical, maniobra rotacional de todo el cuerpo, extensión de las piernas y balanceo de todo el cuerpo con las patas delanteras fijamente estables a la superficie. La duración de todo el proceso de aterrizaje exitoso fue de aproximadamente 4-8 impactos de ala de acuerdo con 18 observaciones, mientras que la frecuencia promedio de impacto de ala fue de 172.7 ± 7.7 Hz.
Durante los aterrizajes exitosos, los científicos también observaron cambios cinemáticos significativos en los ejes de rotación, los valores de las maniobras de rotación y el grado de balanceo del cuerpo debido a las patas.
Tras reunir todas las observaciones, los científicos identificaron las principales estrategias durante el aterrizaje, que se clasificaron de la siguiente manera: dominante en
cabeceo * , dominante en
balanceo * , combinado y dominante en balanceo lateral / longitudinal.
Paso * : el movimiento angular del cuerpo en relación con el eje transversal horizontal.
Roll * : la rotación del cuerpo alrededor de su eje longitudinal.
Video # 1: aterrizaje con un tono predominante (corresponde a la imagen 1D).Video No. 2: aterrizaje con una tirada predominante (corresponde a la imagen 1E).Las imágenes
1D -
1F muestran patrones típicos de comportamiento de una mosca azul durante el aterrizaje. En los primeros dos ejemplos, las moscas utilizaron maniobras de rotación rápidas, principalmente en relación con el eje de cabeceo (
1D y video No. 1) o balanceo (
1E y video No. 2), que establecieron su cuerpo antes de aterrizar en una orientación casi invertida (panza arriba).
La alineación de las patas se produjo casi inmediatamente después del inicio de las maniobras de rotación (líneas horizontales de puntos negros en
1Di y
1Ei ). Después de que las patas tocaron la superficie, comenzó la fase de balanceo del cuerpo.
Es curioso que la velocidad angular promedio de las maniobras de rotación alcanzó aproximadamente 4000 ° / s, y su valor máximo podría exceder los 6000 ° / s, que es significativamente mayor que el de las moscas de la fruta o incluso los colibríes.
Video # 3: aterrizaje con la vibración longitudinal predominante del cuerpo (corresponde a la imagen 1F).En la tercera versión, las moscas confiaban casi por completo en el balanceo del cuerpo con sus patas (
1F y video No. 3), y la maniobra de rotación fue insignificante.
Video # 4: aterrizaje con balanceo lateral predominante.Por lo tanto, en comparación con las dos primeras opciones, esta estrategia de aterrizaje probablemente utilizó más procesos mecánicos y estructurales (por ejemplo,
adhesión * debido a
pulvillas * o
amortiguación * debido a la viscoelasticidad de las patas), lo que facilitó la transferencia del momento lineal del cuerpo al momento de rotación .
Adhesión * : adhesión de superficies de diferente origen (por ejemplo, gotas de rocío sobre el césped).
Pulvilla * : almohadillas suaves de la punta de las piernas, cada una de las cuales se encuentra debajo de su garra. La tarea principal de pulvillas es mantener al insecto sobre una superficie vertical lisa o inclinada.
Amortiguación * - supresión artificial de vibraciones.
El siguiente paso en el estudio fue estudiar las diferencias cinemáticas entre los aterrizajes exitosos y los que no tuvieron éxito.
Video No. 5: aterrizaje con mecánica combinada de lanzamiento y lanzamiento.Los aterrizajes sin éxito incluyeron aquellos que terminaron en una colisión con la superficie (que es para los científicos los datos para el análisis, luego para las moscas una conmoción cerebral, en sentido figurado, por supuesto).
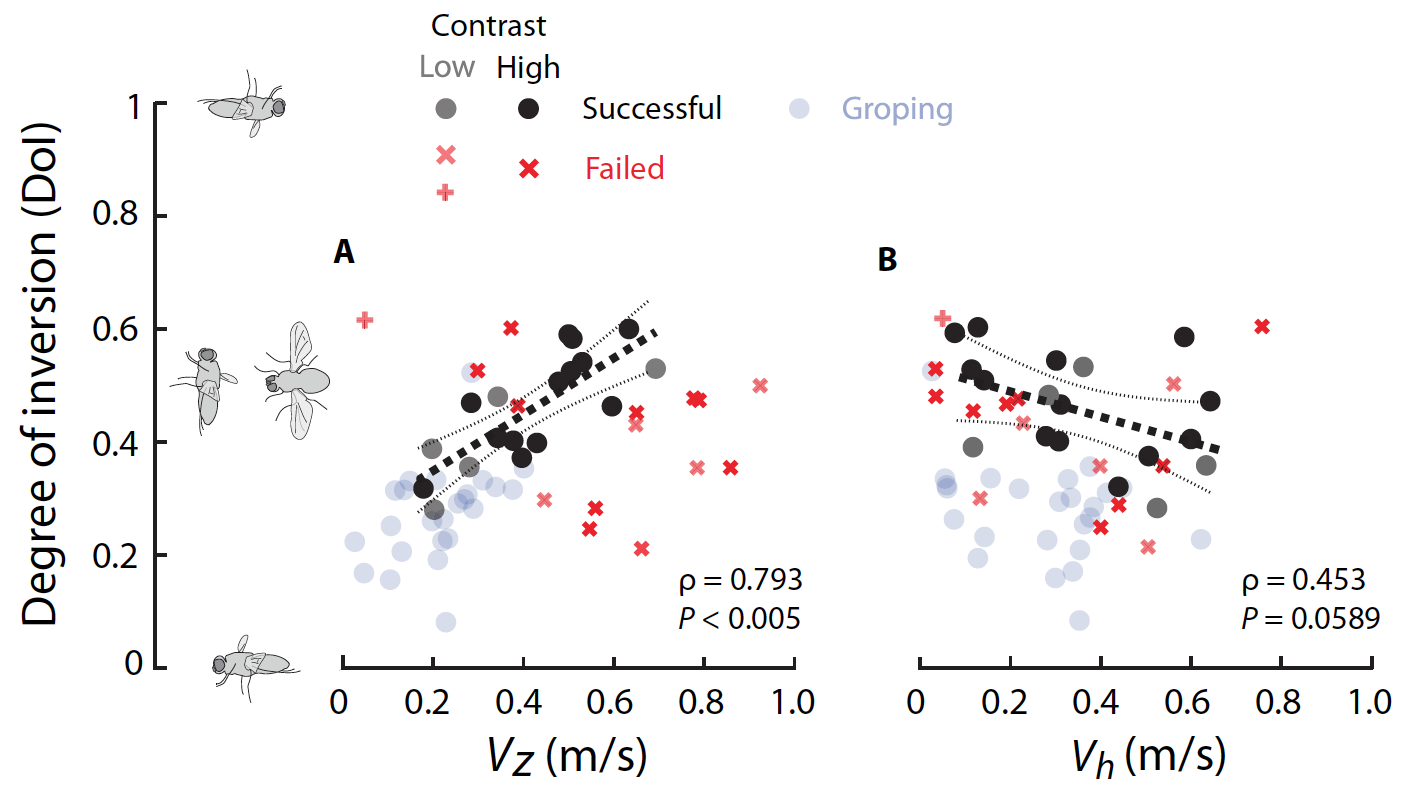 Imagen No. 2
Imagen No. 2Para cuantificar qué tan bien estaba orientado el cuerpo de la mosca, se calculó un grado de inversión (DoI del
grado de inversión ), que mide el grado en que el cuerpo de la mosca está alineado con su orientación totalmente invertida antes del aterrizaje. DoI varía de 0, lo que significa la ausencia de inversión del cuerpo, es decir abdomen hasta 1, lo que significa inversión de todo el cuerpo, es decir panza arriba En aterrizajes exitosos, DoI aumentó a una velocidad vertical (
2A ), pero disminuyó a una velocidad longitudinal (
2B ).
Esta observación indicó que las moscas necesitaban rodar más cuando su velocidad ascendente era mayor o cuando su velocidad horizontal era menor. En la mayoría de los aterrizajes fallidos (hubo 15 en total), las moscas no se volcaron antes del momento del aterrizaje en comparación con la posición de las moscas que hicieron aterrizajes exitosos.
La causa de la falla podría ser la rotación prematura o insuficiente del cuerpo antes de aterrizar. Por lo tanto, estas moscas no pudieron aterrizar correctamente en el techo, sino que se estrellaron contra él.
Video # 7: aterrizaje fallido debido a una maniobra rotacional demasiado temprano.Además, los aterrizajes fallidos también ocurrieron debido a la rotación demasiado temprana del cuerpo (video No. 7), ya que una inversión anterior condujo a una velocidad vertical insuficiente necesaria para alcanzar el techo (marcado con un "+" en los gráficos
2A y
2B ).
Video No. 8: aterrizaje fallido debido a una inversión débil del cuerpo con una alineación prematura de las piernas.Otra razón para las fallas, a pesar de la correcta inversión y velocidad de movimiento, fue la alineación tardía de las patas, lo que condujo a una ubicación incorrecta y, por lo tanto, un contacto insuficientemente tenaz con la superficie (video No. 8).
Video # 6: un ejemplo de contacto aterrizando en el techo.A pesar de todos los pinchazos y deficiencias, algunas moscas aún podrían recuperarse y aterrizar con éxito utilizando un aterrizaje de contacto. En este caso, las moscas vuelan con una velocidad vertical baja debajo del techo, luego sienten la superficie usando las patas delanteras y luego se aferran y aterrizan (video No. 6).
Video # 9: aterrizaje fallido debido a una inversión débil del cuerpo con una ligera rotación del cuerpo.Resumiendo los datos obtenidos de las observaciones, los científicos llegaron a la conclusión de que los aspectos cinemáticos del aterrizaje de la mosca contienen procesos neuronales mucho más diferentes de lo que se pensaba anteriormente. La característica más llamativa sigue siendo la maniobra de rotación. Solo queda entender qué lo provoca, o más bien qué señales conducen al hecho de que la mosca lo usa para aterrizar.
Lo primero que viene a la mente, por supuesto, son las señales visuales que reciben las moscas al acercarse al techo con una velocidad lineal que consta de tres componentes (
1C ): vertical (
V z ), longitudinal (
V x ) y lateral (
V y ).
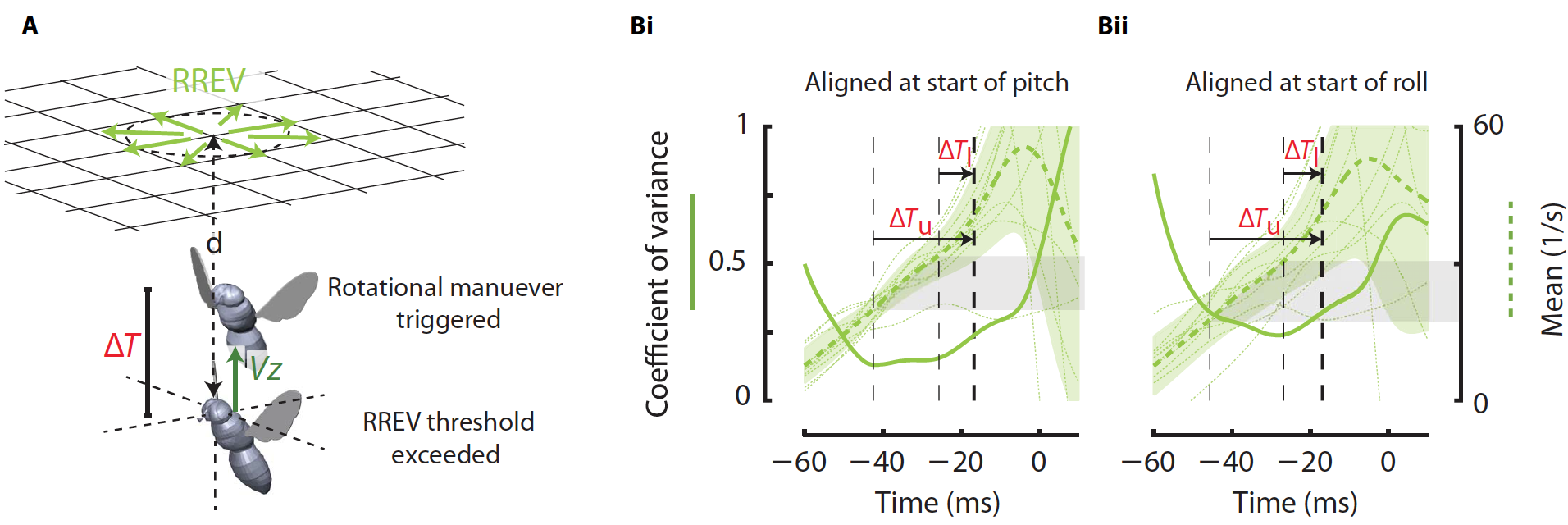 Imagen No. 3
Imagen No. 3Gracias al trabajo de sus predecesores, los investigadores conocen con precisión los tres tipos principales de señales visuales necesarias para evaluar el movimiento de la mosca.
Primero, la tasa relativa de expansión retiniana (
RREV ) debido a estímulos inmóviles (
3A ). Este indicador puede calcularse como la relación entre la tasa de aumento del objetivo y su tamaño real en la retina de la mosca durante el movimiento hacia arriba (
V z ). RREV también corresponde al recíproco del tiempo de colisión (
t ). RREV se considera una señal importante de percepción, que controla la velocidad de aproximación durante el aterrizaje o caminar alrededor de obstáculos.
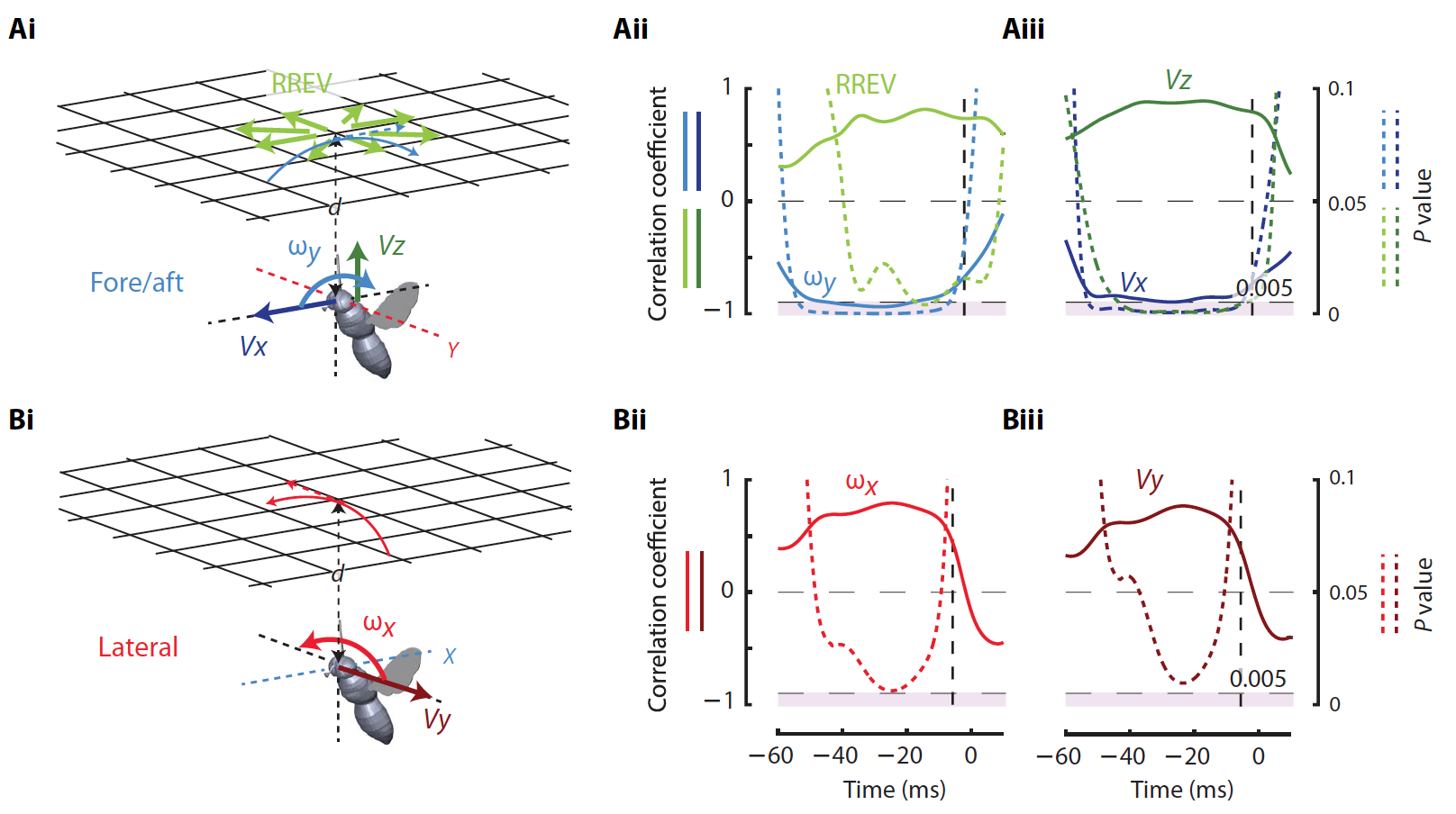 Imagen No. 4
Imagen No. 4En segundo lugar, la velocidad angular relativa de la dirección longitudinal (
4Ai ) del techo en la retina de la mosca (ω
y ). Estas señales visuales son el resultado de mover el cuerpo hacia adelante / hacia atrás (
V x ), es decir. en dirección horizontal Anteriormente se descubrió que son estas señales las que regulan el aterrizaje en superficies horizontales.
En tercer lugar, la velocidad angular transversal relativa del techo (ω
x ) en la retina de la mosca (
4Bi ) obtenida como resultado del movimiento lateral (
V y ).
Los investigadores sugieren que la maniobra rotacional comienza después de un retraso de tiempo fijo cuando la señal visual provocativa (señal, que conduce a la acción real) alcanza un valor umbral. Esta suposición nos permite evaluar la relación de las señales anteriores y las maniobras de movimiento realizadas por la mosca durante el aterrizaje.
El primer paso fue calcular las curvas de tiempo del coeficiente de variación (CV) de cada una de las señales visuales. Las observaciones se tomaron como base, durante el cual las moscas aterrizaron con éxito en el techo en el primer intento.
Si se iniciaron maniobras de rotación después de algún retraso, cuando la señal visual alcanzó un valor umbral, el CV de esta señal visual debería ser mínimo. Además, debería ser inferior al de otras señales visuales no provocativas, es decir, La señal visual provocativa debe tener la menor dispersión. Las observaciones y los cálculos mostraron que entre las tres señales probadas, fue RREV el que tenía el valor CV más bajo en el momento de girar el giro (15%) y rodar (25%), mientras que las otras dos señales visuales tenían un CV significativamente más alto (
3B ).
Esto significa que RREV es la señal visual principal que desencadena el inicio de una maniobra de rotación durante un aterrizaje invertido.
El valor de CV para RREV era mínimo entre 7 ms (∆T
l ) y 27 ms (∆T
u ) antes del inicio de la maniobra de rotación. En consecuencia, el retraso visual DT entre el momento de la percepción y el comienzo de la maniobra estuvo en este pequeño rango. También se descubrió que el tiempo crítico antes de una colisión, por debajo del cual se inicia una maniobra de rotación (para evitar una colisión y aterrizar con éxito), es de 31-53 ms. A modo de comparación, para las moscas que aterrizan en superficies verticales, esta cifra es de 76 ms. En otras palabras, al aterrizar en el techo, las moscas tienen mucho menos tiempo para el error.
Las maniobras rotacionales, a juzgar por las observaciones, fueron bastante variables en términos de velocidad de balanceo y cabeceo. Esta variabilidad puede indicar que la maniobra de rotación está regulada no solo por el componente de tiempo, sino también por otras señales sensoriales.
Las moscas usan señales sensoriales para proporcionar maniobras de rotación a través de canales directos y de retroalimentación. El canal de comunicación directa emite comandos de control espontáneo que causan cambios transitorios significativos en el movimiento del ala. Estos cambios afectan directamente la amplitud de la reacción primaria a la maniobra.
El canal de retroalimentación proporciona una respuesta compensatoria que provoca un pequeño cambio en el movimiento del ala. Tales cambios afectan la amortiguación (supresión de vibraciones) y la estabilización de la maniobra.
El grado de influencia de una señal de sensor particular en la maniobra se evaluó detectando la correlación de la velocidad máxima de balanceo y rotación durante la maniobra de rotación con las señales sensoriales recibidas por las moscas antes o después del inicio de las maniobras.
Las señales del sensor propuestas incluyen tres visuales (RREV, ω
x y ω
y ), discutidas anteriormente, y tres componentes de la velocidad lineal (
V x ,
V y y
V z ).
El análisis de regresión lineal mostró que durante un largo período de tiempo antes del inicio de las maniobras, la velocidad máxima de cabeceo se correlacionó positivamente con RREV (
4Aii ) y la velocidad vertical
V z (
4Aiii ), pero negativamente con la rotación longitudinal ω
y (
4Aii ) y la velocidad lineal longitudinal
V x (
4Aiii ).
A su vez, las velocidades máximas de balanceo se correlacionaron positivamente con la rotación lateral ω
x (
4Bii ) y la velocidad lineal lateral
V y (
4Biii ) durante un período prolongado de tiempo antes y después del inicio de la maniobra.
El análisis también indicó que las moscas pueden cambiar la fuerza de la maniobra de rotación para utilizar de manera más efectiva las vibraciones del cuerpo al momento del aterrizaje, es decir, la transmisión de un impulso lineal a uno angular.
Como mostraron las observaciones, la velocidad de tono disminuyó cuando el pulso lineal era alto, como lo indica la correlación negativa entre el nivel de tono máximo y las señales del sensor. Por lo tanto, en lugar del paso, las moscas giran su cuerpo, aumentando la oscilación longitudinal del cuerpo con sus patas y transmitiendo un impulso lineal directo al momento angular del paso.
También se observó un aumento en la velocidad de balanceo cuando el impulso lineal lateral fue alto, como lo indica una correlación positiva entre la velocidad máxima de balanceo y las señales sensoriales. Tal correlación inversa puede ocurrir en situaciones donde las moscas necesitan una mayor distancia para elevar sus patas ipsilaterales lo suficientemente alto y alcanzar el techo para un mayor balanceo del cuerpo.
No te olvides del atributo más importante de vuelos para moscas, es decir sobre alas Los investigadores analizaron la cinemática de las alas de las moscas durante un aterrizaje en el techo, ya que son las alas las que crean los diversos impulsos aerodinámicos necesarios para maniobras exitosas.
Las observaciones de las alas de las moscas azules revelaron una serie de cambios que ocurrieron en el momento de la maniobra.
 Imagen No. 5
Imagen No. 5Lo primero que se descubrió fue un cambio simétrico bilateral en la rotación longitudinal del ala (
5A y
5Ci ) y cambios simétricos bilaterales en el ángulo del plano del ala (
5A y
5Cii ), que se correlacionaron fuertemente con la frecuencia de cabeceo. También hubo cambios en la inclinación del ala (
5B y
Ciii ), que se correlacionaron fuertemente con la velocidad de balanceo. Además, también hubo cambios en la amplitud de las aletas y la rotación del ala central, lo que contribuye al balanceo.
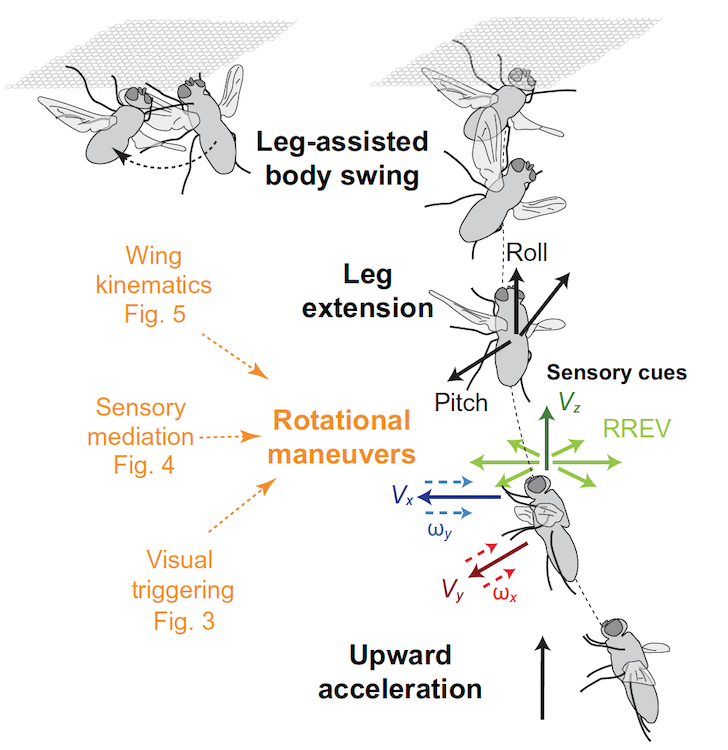 Imagen No. 6Para conocer más detalladamente los matices del estudio, le recomiendo que consulte el informe de los científicos y los materiales adicionales .
Imagen No. 6Para conocer más detalladamente los matices del estudio, le recomiendo que consulte el informe de los científicos y los materiales adicionales .Epílogo
, , ( ).
, RREV, , , .
, . .
. . , , , , . , , .
- , . , , , , , .
, , ! :)
, . ? ?
Apóyenos haciendo un pedido o recomendándolo a sus amigos, un
descuento del 30% para los usuarios de Habr en un servidor de nivel de entrada analógico único que inventamos para usted: toda la verdad sobre VPS (KVM) E5-2650 v4 (6 núcleos) 10GB DDR4 240GB SSD 1Gbps desde $ 20 o cómo dividir el servidor? ( RAID1 RAID10, 24 40GB DDR4).
Dell R730xd 2 veces más barato? 2 Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 $199 ! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — $99! . c Dell R730xd 5-2650 v4 9000 ?