Hola a todos Mientras estudiaba en la universidad, recogí un pequeño automóvil eléctrico, un pozo o tarjetas. Su truco fue que todo el control del accionamiento eléctrico, incluidos los frenos, se le dio a un controlador improvisado. Y sobre cómo hice este pequeño automóvil y qué dificultades encontré durante la construcción, me gustaría contarlo en este material. El material no pretende ser único, pero para mí fue una gran e interesante experiencia.

El tema de la historia está en la unión de los aspectos de hardware y software. Y en el firmware para el controlador, no estaba tratando con algunos conceptos o datos abstractos, sino con dispositivos "físicos" muy reales: relés, motores eléctricos, transistores, etc. Así que daré una breve descripción de la parte técnica, la composición que era en el momento de todos los bailes con una pandereta.
Nodos principales
Motor de tracción - colector universal. Puede funcionar tanto de corriente directa como de corriente alterna. Voltaje de operación 220 voltios.

La batería es de 25 celdas de plomo-ácido de 6 voltios cada una fabricada por Casil, conectadas en serie, y como resultado obtenemos una batería de 150-160 voltios. Se instala en la parte posterior y se rebobina con cinta aislante azul, todo está como debería :)

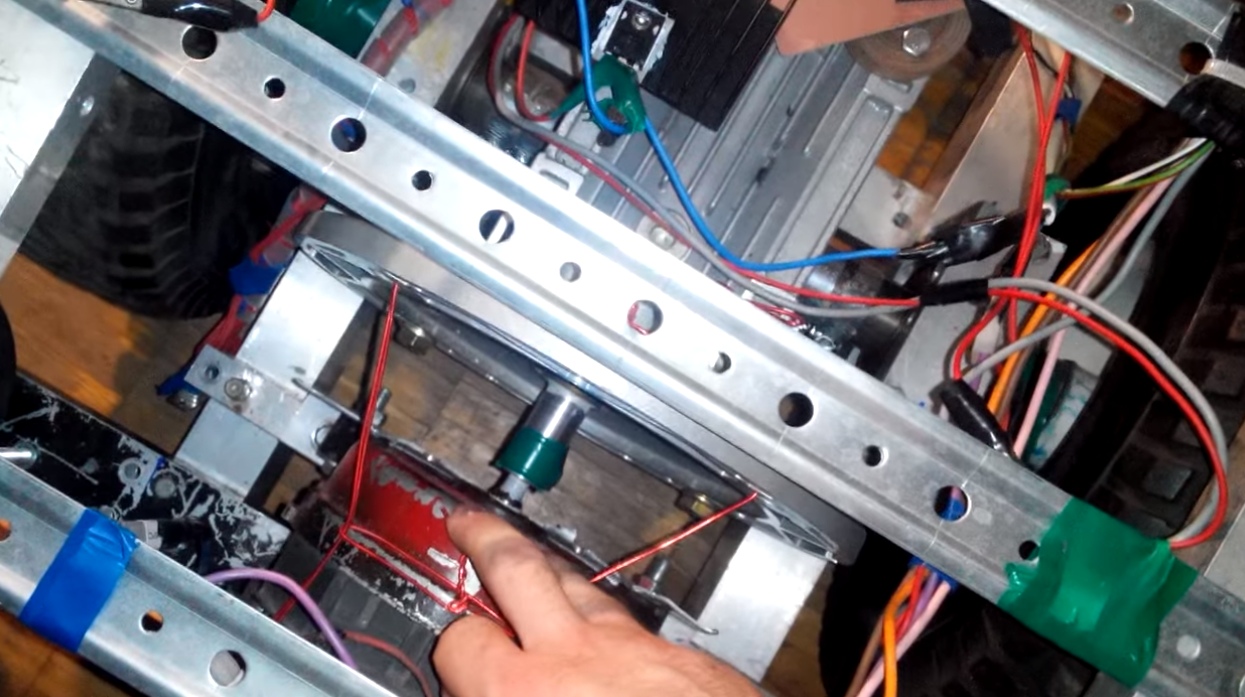
El motor impulsa las ruedas a través de un engranaje helicoidal con una relación de transmisión i = 10. La foto muestra que el motor está acoplado a la caja de cambios con un rodillo pequeño, fue mecanizado especialmente.
El sistema de frenado, es decir, el disco de freno con la pinza, no estaba en principio. Poner un freno físico en ese momento no funcionó. Por lo tanto, el frenado del motor siguió siendo la única opción real, por lo que el controlador también tuvo que tomar el control del frenado de la máquina.
Controlador para unidad de control
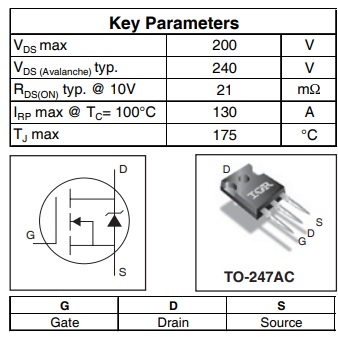
En principio, un controlador simple para un vehículo eléctrico también se puede montar en una "cama suelta". Pero me gustaría poder configurar bellamente todo con la ayuda del programa, después de todo, el siglo XXI. Después de una larga discusión altamente científica en la cena, decidí que el microchip chip pic16f877a debería tomarse como la base del controlador, aquí están sus breves características:

En ese momento, realmente no tenía problemas con la electrónica, e inicialmente quería hacer que el circuito fuera estúpidamente vergonzoso: el motor está encendido o el motor está apagado, pero en lugar de un relé coloque una llave de transistor para que nada haga clic y no se queme. Pero decidí que el riesgo estaba justificado, no perdí nada y solo quería hacer algo que valiera la pena. Así que me decidí por un microcontrolador + transistor de efecto de campo de potencia como clave. El acelerador y el botón de retroceso llevaron al volante.
Características del circuito
Al elegir un transistor, no escatimé y elegí IRFP4227PBF, un transistor de efecto de campo de canal N (se abre con un pulso positivo) para un voltaje de 200 voltios y una corriente máxima de 130 amperios. Caso TO-247AC. Pero, mirando hacia el futuro, diré: pude quemarlo.
PWM: qué es y con qué se come
Como utilicé un microcontrolador junto con un transistor de efecto de campo, fue un pecado no intentar usar pwm / pWM en el circuito. ¿Qué es una cuña? La modulación de ancho de pulso (PWM) es el proceso de control de potencia mediante el método de encendido y apagado por pulsos del dispositivo. - Gracias a Wikipedia.
La ventaja de este método para controlar el transistor: durante la operación, está en dos estados: completamente cerrado, no hay corriente y nada se calienta, o está completamente abierto y su resistencia es de varias millas, respectivamente, algunas fracciones de un vatio de calor se disipan en el calor del transistor. o unidades de vatios, el circuito apenas se calienta en este modo de operación. Y tal proceso: abrir / cerrar ocurre miles de veces por segundo. Esto se llama frecuencia PWM. También existe una cosa llamada "ciclo de trabajo". Traducción al lenguaje humano: esta figura muestra cuánto tiempo está abierto el transistor. Si profundizamos un poco más, digamos que tenemos una frecuencia de una señal PWM de 1000 hertzios. Entonces, el transistor se abre y cierra 1000 veces por segundo, y el proceso de conmutación entre encendido y apagado es 1/1000 una fracción de segundo. El valor 1/1000 es el período de la frecuencia. Y con la ayuda del ciclo de trabajo, mostramos qué parte del tiempo desde el período en que el transistor está abierto y la corriente fluye a través de él. Por ejemplo: en el programa, el ciclo de trabajo 255 es la potencia máxima, 127 - 50%, 0 - el transistor está cerrado.
Para generar dicha frecuencia, se usó el controlador "físico" integrado en el chip, aunque existe la posibilidad de implementación de software, pero en este caso el controlador solo hará lo que sea para generar una frecuencia con un período específico y un ciclo de trabajo en la salida. Y usando un controlador desde la periferia del MK, era posible generar una señal, y así el programa haría otra cosa.
Cuanto más se adentre en el bosque, más enojados estarán los lobos: la eficacia del accionamiento eléctrico dependerá de la frecuencia de PWM. Probé diferentes frecuencias, de 2 a 15 kilohercios, cada vez que cambiaba programáticamente. Honestamente, no noté mucha diferencia, pero estoy seguro de que sí. Lamentablemente, los datos sobre este tema no se pudieron obtener en cantidades suficientes. Lo único que noté fue que la máquina chirrió a diferentes frecuencias durante la operación. Por cierto, si alguien notó en el metro, autobuses eléctricos y trenes que durante el inicio escuchas un retumbar, un chirrido, un aullido: este es el mismo chirrido de los devanados del motor debido al trabajo en las frecuencias del controlador. Esto es muy notable en el tren "Swallow", que recorre el CCM durante el inicio.
Errores en el algoritmo de trabajo
El siguiente problema fue con el motor en reversa. El motor es un colector, tiene dos devanados, inmóvil, un estator, en el cuerpo y giratorio, un rotor. Para cambiar la dirección de rotación, es necesario desplegar la dirección de la corriente en uno de los devanados, no yo en la dirección del otro. Para esto, se utilizaron dos relés, que funcionaron simultáneamente, "lanzando" el circuito para revertir cuando se les suministró energía. Pero en la primera versión del firmware hubo un error: los relés cambiaron bajo carga. Como resultado de la prueba bajo carga, hay dos relés quemados, ya que el motor es una carga inductiva y hubo un fuerte arco en los contactos del relé, los contactos simplemente se derritieron y quemaron durante la conmutación.
La forma de salir de la situación es introducir en el programa la condición de que antes de apagarla eliminamos la carga desenroscando el ciclo de trabajo de la señal PWM en 0, lanzamos el relé y volvemos la potencia al nivel establecido. Así es exactamente como funcionaban los frenos del automóvil: marcha atrás. Solo hardcore: sin sensores y codificadores, nada. Y aquí está la foto del relevo, es como una retransmisión de arranque del Lada. Si los cambia sin carga, también funcionan con altos voltajes, mantuvieron 160 voltios a 15 amperios, pero admito que los contactos se calentaron debido a la pequeña sección transversal.


Después de que terminé el firmware, y la potencia aumentó sin problemas a un nivel determinado. Y esto ya elimina el choque en la transmisión y la carga en los nodos. Así es como una línea en el programa puede aumentar la vida útil de la unidad.
Conectamos el controlador con el transistor correctamente
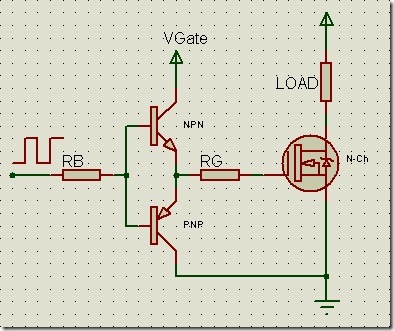
Solo quedaba conectar correctamente el transistor con el controlador. Hice esto de forma incorrecta, a través de un par óptico, directamente. Pero este circuito funciona cuando se trabaja con voltajes bajos, a voltajes de operación altos, el obturador del transistor se quema constantemente, y se necesita un controlador push-pull para controlar. El circuito normal se muestra a continuación. Sin embargo, en un momento, el circuito con un par óptico fue suficiente, por algún milagro, funcionó para una prueba de manejo, y comenzó a quemarse inmediatamente después. Aquí está el diagrama del controlador "correcto", solo en mi versión todavía había un desacoplamiento de la óptica del controlador. Imagen tomada de Drive2:
Algunos puntos interesantes
- Al arrancar, el motor eléctrico consume muchas veces más electricidad incluso sin carga. Y cuando el rotor frenaba durante el arranque, los cepillos de grafito comenzaron a humear.
- En ese momento, cuando el transistor se quema en la máquina, comienza a funcionar solo, porque solo el transistor separa la batería del motor. Por lo tanto, la introducción de esquemas de protección se justifica si no desea correr detrás del automóvil y rezar para que no golpee a nadie.
- El motor que utilicé es de una lavadora. Volumen de negocios sin carga, reclamó 14,000, es difícil de creer, pero esta cifra estaba en la placa de identificación. Aunque tira perfectamente "desde abajo".
- El voltaje en la batería se hunde, sin una carga que tenía alrededor de 150 voltios, puede estar tranquilamente 140 bajo carga. Y si la batería está demasiado baja, entonces 130, debido a esto, el automóvil podría conducir muy bien con baterías nuevas durante los primeros minutos, luego, cuando las baterías se gastaron En algún lugar alrededor del 20-30% de la energía, más o menos comenzó el modo de funcionamiento, el automóvil conducía más lentamente, aceleró más lentamente, pero no era tan notable. Cuando las baterías consumieron aproximadamente el 70% de la carga, el viaje se convirtió en un curso de tortuga.
- Incluso logré quemar un transistor bastante potente debido a una sobretensión en su obturador. Para protegerse contra esto, debe derivar la puerta del transistor con un diodo a la fuente de alimentación + del controlador del transistor.
- Los relés se conectaron al MK utilizando interruptores de transistor de baja potencia en pequeños ratones.
Al final, lo que sucedió en el video
En general, mis experimentos con el motor eléctrico comenzaron en la escuela y probé muchos diseños diferentes, pero este es el esquema más exitoso en ese momento. Si te gusta el material, escribiré una publicación separada sobre toda la epopeya.
UPD: Cambió los errores en el artículo, gracias a todos los que respondieron