Vivió feliz para siempre ... y luego se rompió.Prologo
Durante un año, parece que en 2009, se compró un analizador de agua para un proyecto. Debido al hecho de que se suponía que debía usarse para garantizar el funcionamiento del equipo tecnológico, el dispositivo se compró completo con un inyector automático.

Esto es esencialmente un manipulador CNC con cuatro grados de libertad de movimiento para alimentar automáticamente las muestras al analizador.
Trabajó durante unos 10 años y archivó más de treinta mil muestras con algunos problemas menores, que, sin embargo, fueron superados con "poca sangre".
A principios de este año estaba cansado: el eje Z falló, movimiento vertical.
Es decir, el manipulador simplemente dejó de "verlo". En vista de una serie de circunstancias de mantenimiento oficial, el complejo de medición nunca tuvo problemas menores (reparación de PSU, parpadeo después de una falla FLASH) se resolvieron de forma independiente. Aquí ya tenía que buscar funcionarios, de quienes resultó ... Algunas características:
- resultó que el manipulador no solo es viejo, sino desastrosamente viejo
- era viejo y descontinuado con la compra
- no hay documentación para ello
- toda la electrónica debe ser cambiada
- las piezas están disponibles pero cuestan más que las nuevas
- no hay una garantía del cien por ciento de que con un reemplazo funcionará
Algunas características que conocía:
- el firmware del fabricante no funciona con el analizador (es bueno que se haya realizado una copia de seguridad),
- el cargador de arranque también parece haber cambiado, ya que el firmware de fábrica "tal cual" no se acepta
- no hay forma de "actualizar" el gestor de arranque, por lo que comprar productos electrónicos por $ 6k es inútil
- la mecánica está en excelentes condiciones, ya que la revisaba periódicamente
- Los sensores de cero (Hall) están vivos
Por lo tanto, resultaron dos opciones:
- comprar un nuevo analizador del fabricante por $ 17k y un tiempo de entrega incomprensible
- rehacer todos los programas electrónicos y de escritura
Primera parte, hardware
Para empezar, decidí asegurarme de que la mecánica funciona a un voltaje de 12v (contra 37 en el original). Decidió bajar debido al hecho de que el control de potencia de la mitad del engranaje de control se calienta decentemente. Por lo tanto, los controladores A4988, la placa de identificación del CNC y Arduino NANO fueron retirados de la mesa de noche. todo esto fue atracado, exhibido por el famoso proyecto grbl e interrogado con parcialidad. La frecuencia de paso máxima se obtuvo para cada unidad, se ajustaron los coeficientes de división de pasos, las corrientes del controlador.
Resultó que XY no se calienta en absoluto, y dan una velocidad bastante adecuada. La corriente para la unidad Z - tuvo que ser atornillada al máximo, debido a la división entre 8 y el consumo decente al comienzo del movimiento ascendente, ya que extrae una gran masa de dos SD y entrañas, mientras que el chip del controlador se calentó hasta 50 grados incluso con un radiador. Tuve que agregar un enfriador al ventilador frente a esta unidad en el diseño final.
Al final, en cambio

resultó
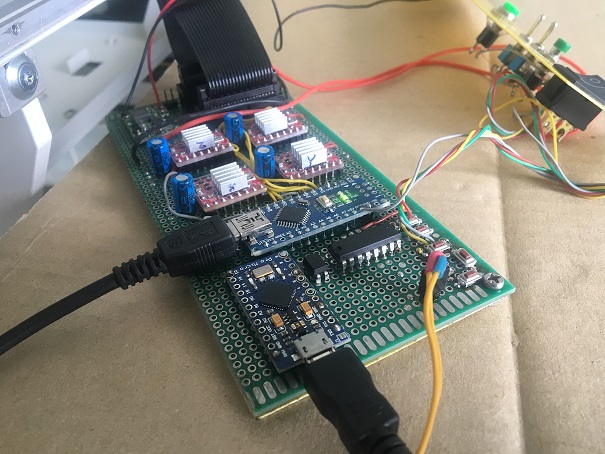
El Arduino Pro Micro será una canción separada. En el fondo hay un panel con interruptores para seleccionar un modo de funcionamiento, botones de inicio y reinicio.
Ahora sobre tripas. Como dije, todos los sensores Hall sobrevivieron. De estos, los XY solo son interesantes para las diferentes lógicas de activación. Si en Y el sensor se abre OK cuando se acerca al imán, entonces en X el imán está constantemente opuesto al sensor, y en Zero-X y más entre ellos hay un obturador magnéticamente suave que protege el sensor del imán, mientras se cierra OK. A la luz de esta heterogeneidad, es necesario comprender a dónde ir cuando se buscan ceros. Para hacer esto, el diseño original proporciona una posición de estacionamiento al final del trabajo. Sin embargo, no se implementó en absoluto: cuando se desconectó la alimentación, tuve que atrapar mi cabeza en el eje Z con la mano y avanzarla manualmente a la posición de estacionamiento.
Sobre Z es la historia principal. Allí, en el caso Z, el émbolo de la jeringa sigue vivo, sin un sensor cero, pero con un sensor de doble rotación, casi un codificador. Y también hay un sensor para presionar el vial con una falla, implementado por un engranaje helicoidal y también un sensor Hall. Ambos sensores de rotación son engranajes de latón que pasan con dientes más allá de los sensores Hall con magnetización.
¿Por qué necesito un codificador magnético (como parte de mi tarea privada)? Todavía no lo entendía y, por lo tanto, lo reemplacé con un sensor cero para el accionamiento del émbolo, ya que los pasillos estaban allí, en la mesa de noche, así como un pequeño imán de neodimio de la unidad de lentes de DVD.
En cambio

Se convirtió
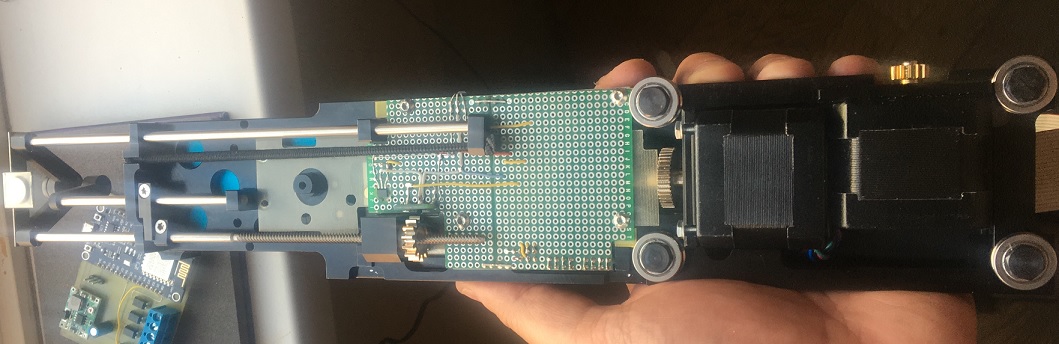
El principal problema de esculpir hierro era abarrotar, bueno, usted mismo comprende. Realmente no quería guardar algo en una caja separada, como resultado, todo encajaba en los lugares previstos para esto, pero ahora lo haría un poco diferente.
Segunda parte, softwareLas pruebas en la placa de identificación del CNC mostraron una velocidad decente. PERO! Si intenta ofrecer a la SD de inmediato la frecuencia de PASO correspondiente a esta velocidad, no obtendrá nada más que un gruñido. Para alcanzar velocidades de movimiento decentes, el motor paso a paso debe acelerarse, como si apreciara los engranajes y condujera los rieles (bueno, o los tornillos de bola, o las correas), luego reduzca la velocidad suavemente. Porque el código trivial ha crecido un poco.
Dado que es casi indecente venir a la sección de "Robótica" con un artículo sin código, por ejemplo, manejar el control Z (por culpa). Al emitir una frecuencia a STEP, digitalWrite no tiene tiempo, debe extraer el puerto directamente. Probablemente se retrasó y se retrasó, pero el código provino del control XY y allí se necesita simultaneidad.
En el conjunto de niveles de función:
- bajo - ir y venir, encontrar algo que no sé qué
- medio: calibre a ceros, extraiga una jeringa, haga una muestra de la muestra
- diagrama de ciclo alto de la derivación del enésimo número de viales en una paleta
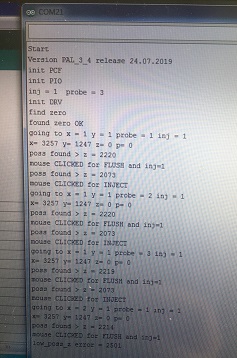
El programa comienza inicializando los puertos, leyendo la configuración especificada de los interruptores en el panel posterior y, después de presionar INICIAR, elaborando el diagrama de secuencia hasta encontrar una posición en el palé en la que no hay un vial con la muestra.
El diagrama de secuencia principal se ve así:
inline void frame_1(){ for (unsigned int i=0; i<6; i++){
Los atavismos en la forma de enviar información de depuración a Serial permanecieron en el código, quedando para futuras mejoras. uno casi ha madurado, recibió jeringas analíticas por cuatro veces el volumen, tendrá que agregar otra opción al comienzo.
El principal problema al compilar el programa fue que, en el original, el analizador le da al inyector automático dónde ir y qué hacer. Todo esto sucede a través del puerto COM y el protocolo, que no se puede tomar. Porque tuve que salir.
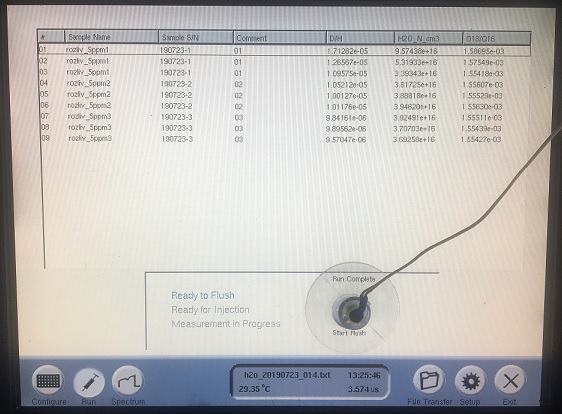
El analizador tiene un modo manual para aquellos que no han comprado un muestreador automático de
ardilla . Al mismo tiempo, aparece un botón oscuro de "muestra lista" en la pantalla del analizador y, cuando el operador es apuñalado, debe tocarlo con el mouse (rastreador en el panel del analizador). Cuando se completa la medición, aparece un botón oscuro de "inicio de lavado" y, si el operador tiene otra muestra, la presiona con el mouse para preparar el analizador para la próxima medición. Después de hacer clic con el mouse, el botón desaparece y queda un campo blanco (brillante). Decidí captar esta diferencia de brillo con un fotosensor. Compruebo la apariencia del botón oscuro con un fotorresistor pegado en la ventosa. No encontré una ventosa negra, y cuando sale el sol por la ventana, tengo que cubrir el sensor del botón con algo.
¿Pero tienes que hacer clic en algo? Afortunadamente, el analizador tenía un puerto USB y suficiente embotellado RedHat no circuncidado a principios de 2000 para engancharse automáticamente en este puerto. Es para emular el mouse en la nueva placa principal del automuestreador donde se encuentra el Arduino Pro Micro. recibe un PIN de NANO en el momento en que se debe hacer clic en el analizador. Era demasiado perezoso para escribir el movimiento, porque antes de comenzar a trabajar, el mouse debe estar configurado con anticipación en el botón.
O FELICIDAD, que cargada de experiencia, liberé la parte del mouse del otro optron galvánico económico y económico. DEBIDO al final del segundo día de depuración en especie, cuando todo funcionaba y configuré el zumbador para emitir sonidos similares a los originales, uno de los controladores lanzó humo mágico y conectó la sección de alimentación de 12v a la lógica de 5v. Bueno, nada, medio día de reemplazarlo con uno extraído de una mesita de noche sin fondo no es una reparación del analizador de $ 100k. Es cierto que más tarde resultó que la nueva fuente de alimentación REXANT comprada en lugar de una casa olvidada en algún momento comenzó a producir casi 50 en lugar de 12v, lo que causó un retraso desafortunado.
Tercera parte, prueba de calibración y confiabilidadDespués del montaje y la depuración inicial, surgió el problema del recuento de posiciones por la ubicación real del vial. Tuve que hacer un teclado y escribirle una interfaz simple en la serie. No quedaban puertos, pero para el caso más extremo se almacenaron los pines responsables de i2c. Se colgarían en el extensor popular PCF8574 con micro botones que se pueden tirar hacia arriba y se pueden usar para mover el XY, seleccionar un multiplicador de pasos para acelerar el proceso y cambiar XY a ZP. Después de cada clic en la serie muestra una nueva posición. Gracias a esta técnica simple, fue posible obtener de forma rápida y precisa todas las coordenadas e incrementos actuales. Fuera del procedimiento de calibración, los interruptores del selector de modo y el botón para activar el ciclograma están conectados a las entradas del expansor. En el video, aproximadamente en el medio, se ven los botones y los interruptores de palanca.
Las jeringas para alimentar una muestra no son baratas: $ 100 cada una. Un error en el posicionamiento cuesta una aguja doblada y una jeringa irrevocablemente atornillada. Por lo tanto, se insertó una jeringa rota con una aguja de coser pegada y el aparato durante casi medio día estaba trillando en cuatro puntos de una hoja de papel para identificar presuntas fallas de posicionamiento. Pero no estaban allí, incluso me sorprendió. Sin embargo, dado que hay suficiente tiempo entre el apuñalamiento de la muestra y el reclutamiento, lo usé para buscar ceros, por si acaso. En el video, este momento se ve más cerca del final del video.
Epílogo
En general, fue más probable que fuera exitoso. Pasaron dos semanas desde la comprensión de la desesperanza hasta la transferencia a la producción. Operado desde finales de mayo, produce hasta 200 mediciones por día. El colega a cargo del muestreo y la medición no se queja.
Las cerezas para el pastel eran nuevas características que no estaban en el original. Posibilidad de moverse en XY al mismo tiempo. La capacidad de doble pin de la muestra, lo que aumentó la sensibilidad del analizador a concentraciones ultrabajas de la sustancia medida en la muestra. Estacionamiento automático después de la medición.
PostScriptum
A petición de los interesados, un video.