Hola a todos!
En este post quiero volver a la continuación del diseño de la máquina para realizar pruebas físicas y mecánicas.
Permítame recordarle (la
primera parte ) que esta máquina (prototipo) es de tipo voladizo y puede realizar pruebas de tracción y compresión en dos zonas: superior e inferior.
Además del primer artículo sobre cinemática y ensamblaje, se agregaron al diseño agarres en relieve con esponjas onduladas, impresos en una impresora 3D, la caja de cambios del elevador de la ventana del automóvil actuó como una unidad. Como estamos hablando de la unidad de potencia, este motorreductor es bastante débil, especialmente a bajas revoluciones. Quizás en las siguientes modificaciones del proyecto instale un motorreductor con un motor paso a paso.
Ahora hablaré sobre software. Debo decir de inmediato que el programador de mí es regular, no todo salió como quería, el programa todavía es muy crudo, aunque funciona.
El programa fue escrito en el entorno de programación Delphi. Ya cambiaría el diseño en esta etapa, ya que hay momentos incómodos, pero por ahora no haré esto, primero quiero resolver el algoritmo principal.
La electrónica se basa en un controlador arduino y dos módulos adicionales. El firmware que se carga es bastante simple, es decir, la recopilación de datos de dos sensores, la recepción y transmisión de datos a través del puerto serie y el control del motorreductor.
Para trabajar con un puerto serie, instalé la biblioteca ComPort. Los datos del arduino se transmitieron como una cadena: S sensor de fuerza / sensor de desplazamiento E (S123456 / 123E).
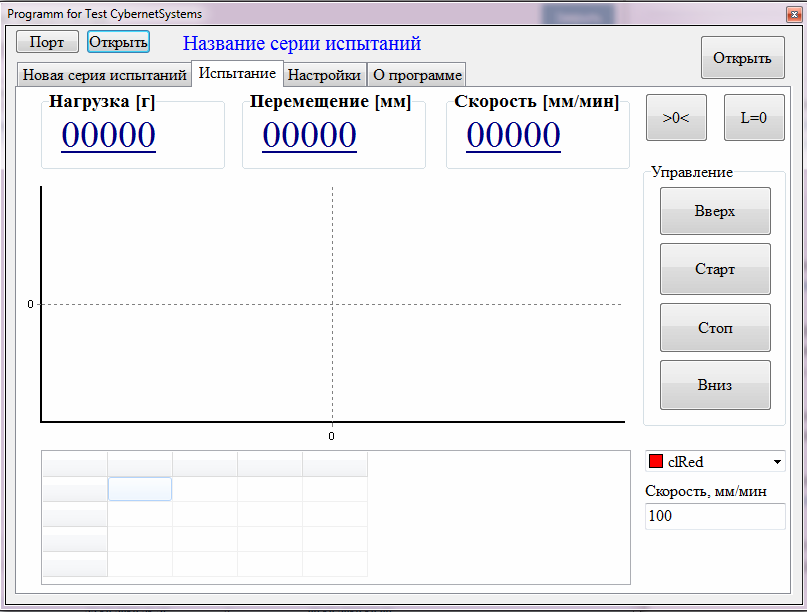
El programa es de una sola ventana, con dimensiones de 800x600 píxeles (para no molestarse con la escala). Contiene varios marcadores: una nueva serie de pruebas, Prueba, Configuración.
Comenzaré con el último marcador: Configuración.
Todos los datos recibidos a través del puerto se muestran en el terminal, de él saco la cadena, verifico su cumplimiento y separo los valores por variables.

Las variables se multiplican por coeficientes para que coincidan con los valores reales de masa y desplazamiento.
Obtenemos todos estos coeficientes en la misma pestaña, en los campos correspondientes a fuerza, desplazamiento o velocidad.
El coeficiente de cálculo de velocidad funciona de acuerdo con el principio inverso, traduce el valor establecido (real) de la velocidad en lo que Arduino entiende de 0 a 255.
Después de completar todos los campos y calcular los coeficientes, los datos se pueden guardar. Se guardan en el archivo Exel, ya que es conveniente verlo y corregirlo si es necesario.
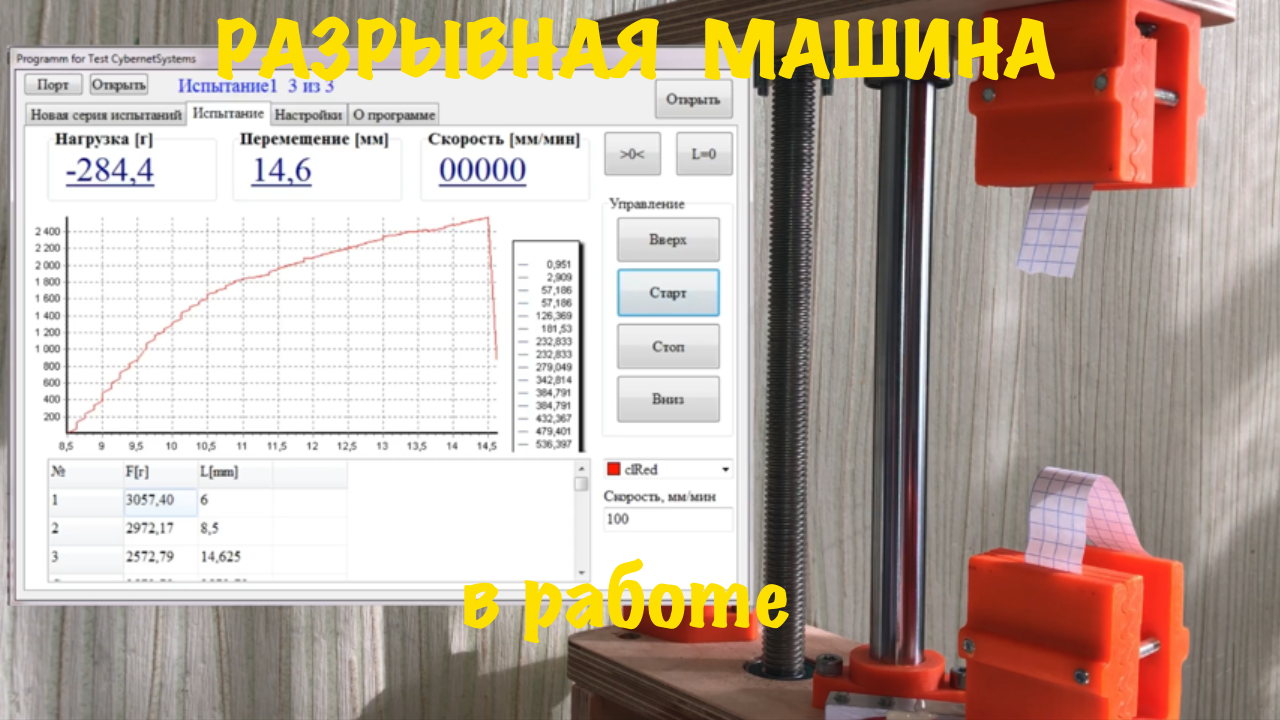
Vayamos a la página - Prueba.
Esto, se puede decir, la página principal cuando se trabaja con la máquina. La parte superior muestra datos de los sensores. Los botones de control de la máquina están ubicados en el lado derecho: moviendo el yugo móvil "Arriba", "Abajo" y "Parar". El botón "Iniciar" comienza la prueba con la velocidad y la dirección especificadas en la creación de la prueba, pero más sobre eso a continuación.
En la parte central hay un área de salida del cronograma de pruebas, debajo de la cual hay una tabla resumen de los resultados de una serie de pruebas. La tabla se llena automáticamente después de la prueba (destrucción de la muestra), los valores máximos de fuerza y desplazamiento.
Para comenzar una nueva serie de pruebas, iremos a la primera pestaña.
Debe indicar el nombre de la serie de pruebas, el número de pruebas y la velocidad con la que se moverá el haz durante la prueba. Por lo general, para las pruebas según GOST es de 12 mm / min, pero en mi caso es un poco más alto, ya que el motorreductor no tiene suficiente potencia a bajas velocidades.

Luego, debe seleccionar el tipo de prueba: compresión, tensión o ciclismo; así como el criterio para la detención automática de la máquina al finalizar la prueba.
Puede haber varios criterios de este tipo: una detención al alcanzar una carga o desplazamiento determinado, y una caída de la carga cuando se destruye la muestra de prueba.
Esto último es preferible, ya que es posible ajustar los topes en una carga que aumenta de forma no lineal.
El criterio para la caída de la carga en una parada se debe a la caída de la carga en porcentaje durante un tiempo determinado.
Después de ingresar todos los parámetros requeridos para las pruebas, haga clic en el botón "Inicio" y vaya a la página "Prueba".
Instalamos la muestra en los agarres, lo más posible coaxialmente, para que la prueba pase correctamente.
En el programa, restablecemos los valores de carga y desplazamiento para que el peso de la muestra y la tensión preliminar después de la sujeción en las pinzas no se tengan en cuenta.
Al presionar el botón "Inicio" se pone en movimiento la poligonal móvil, y se comienza a dibujar un gráfico en la pantalla, que muestra cómo se está arrastrando la carga. Una vez alcanzado su límite físico, la muestra se destruye y la máquina se detiene. En la tabla de resumen debajo del gráfico, aparecen los valores de la carga máxima y la deformación (desplazamiento). Luego puede pasar a la siguiente prueba de la serie.
Al final de la última prueba, los valores promedio de la carga y el desplazamiento se muestran en la tabla de resumen.
Cada serie de prueba almacena parámetros de prueba y datos de matriz en un archivo de Excel. Esto es conveniente para el análisis posterior en otros programas.
En el futuro planeo mejorar el programa y reemplazar el variador con un motor paso a paso con una caja de cambios, y luego se verá ...