En el marco del foro Skolkovo Robotics & AI, el 16 de abril de 2019, Moscú organizó la primera reunión en Rusia sobre Robot Operating System, un marco de software popular mundial que implementa los algoritmos básicos para construir robots complejos. El evento dio un impulso tan poderoso al desarrollo de todos los equipos. Nos sumergimos en lo que más amamos: ¡el desarrollo! Por lo tanto, solo ahora hemos encontrado tiempo para consolidar los materiales únicos de nuestra reunión, transmitidos por los oradores para su publicación.
Entre los visitantes del foro de robótica más grande de Rusia había más de 150 ingenieros que ya usan ROS o simplemente planean usarlo en sus proyectos. Este es un buen resultado para la primera reunión de una pequeña comunidad de desarrolladores de ROS rusos. Nos esforzamos por formar parte del movimiento global, y cientos de participantes ya están reuniendo eventos similares en el extranjero.
El segundo Meetup de Russian ROS se llevará a cabo el 30 de noviembre de 2019 .
Gracias nuevamente a todos los que vinieron y dedicaron su tiempo a un estudio detallado de informes y preguntas difíciles. Todo esto demostró que existe un gran interés por parte de la comunidad en el desarrollo de ROS, y se necesita un trabajo regular para continuar realizando tales reuniones. Crecemos cuando compartimos las mejores prácticas y mejoramos una de las herramientas de desarrollo de robots más comunes del mundo: Robot Operating System.
Nuestros oradores fueron desarrolladores de práctica con temas de su experiencia real. Por lo tanto, los materiales presentados en esta publicación reflejan las posibilidades de usar ROS en proyectos existentes y en curso.
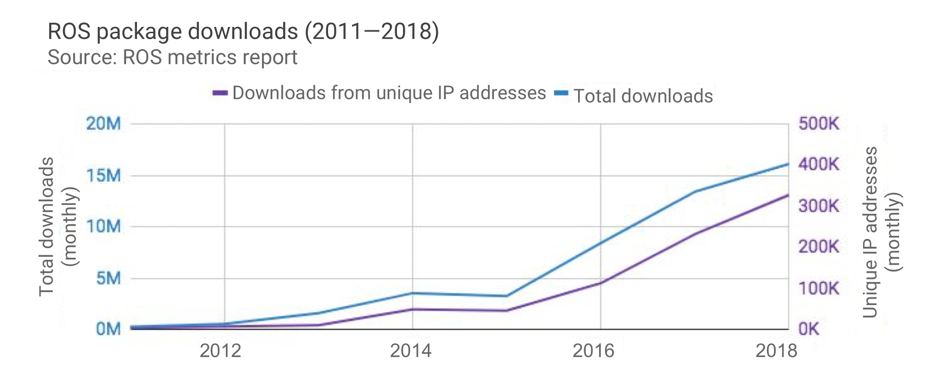
La comunidad global ROS es actualmente la comunidad robótica más grande y abierta del mundo. ¡El número de descargas de ROS ha aumentado casi 6 veces desde 2014! Obviamente, esta es la herramienta más importante para aquellos que crean robots, por lo que en el Laboratorio de Robótica de Sberbank apoyamos a todos los que comparten valores ROS con nosotros y desean intercambiar experiencias.
Si está desarrollando nuevos algoritmos para robots, escribir un paquete para ROS es una buena solución para integrarlos en los robots existentes y demostrarlo al mundo.
Si recién está comenzando su viaje en robótica, aprender ROS le ayudará a dominar las tecnologías modernas y a integrarse en la comunidad.
El primer ROS Meetup estuvo lleno de informes interesantes. Pero como no todos pudieron asistir al evento en Moscú, publicamos videos y diapositivas de presentación para usted:
Introducción a ROS. Ideología y estado actual.Alexey Burkov, Laboratorio de Robótica Sberbank.El informe habla sobre la aparición de ROS, sus conceptos y las personas que lo desarrollaron, así como el estado actual del marco en la comunidad global.
Enlace a diapositivas de presentación.
Experiencia en el uso de ROS en robótica competitiva utilizando el ejemplo de Eurobot.Alexey Postnikov, Laboratorio de Robótica Sberbank.El informe analiza el sistema de localización de robots utilizando marcadores Aruco con ROS.
Enlace a diapositivas de presentación.
Por cierto, puedes participar en las competiciones de Eurobot uniéndote al equipo SetUp apoyado por el Laboratorio de Robótica de Sberbank: esta es una excelente manera de aprender robótica y ROS, y poner tus habilidades en práctica. Para participar, escriba una carta a robotics@sberbank.ru.SLAM y navegación láser lidar.Alexey Burkov, Laboratorio de Robótica Sberbank.La historia de cómo usamos ROS para navegar en un robot de mensajería usando SLAM y un planificador de ruta cubrió los siguientes temas:
- Construyendo un mapa de habitación y localización de robot usando el algoritmo Gmapping.
- Localización del robot en el mapa mediante el algoritmo AMCL.
- Navegación de robots a través de MoveBase y DWA.
Enlace a diapositivas de presentación.
Puede obtener una pasantía en el Laboratorio de Robótica de Sberbank sobre los temas de mensajería y ROS, para esto, escriba una carta a robotics@sberbank.ru.Un planificador de rutas de robots que tiene en cuenta un mapa determinado y obstáculos dinámicos utilizando el ejemplo de Eurobot.Alexander Gamayunov, Laboratorio de Robótica Sberbank.La historia de crear su propio planificador de rutas basado en A *, T *, Costmap Server, Global Planner, STM32 Driver y el algoritmo Ramer-Douglas-Pecker para participar en competiciones internacionales Eurobot.
Enlace a diapositivas de presentación.
Experiencia en el uso de ROS en el sistema de control de un vehículo autónomo submarino no tripulado "Cousteau 2"Timur Akhtyamov, UCM Hydronautics.Simulación de vehículos submarinos. Uso de máquinas de estado SMACH. ROS envoltorio serie. El disparador para los códigos QR. API de Roslaunch para iniciar y detener archivos de inicio desde código Python. Nodos de inicio automático al iniciar el sistema operativo.
Enlace a diapositivas de presentación.
BelAZ en ROS mientras nosotros en VIST Group creamos soluciones mineras.Elizaveta Shpiev, Grupo VIST.La historia de cómo el Grupo VIST usa ROS para crear una carrera inteligente.
Enlace a diapositivas de presentación.
El código de prueba en ROS es cómo construir un automóvil no tripulado y no romper nada.Oleg Shipitko, Visillect.Historia del uso de Google Test (C ++), Unittest (Python) y Rostest para probar en ROS.
Enlace a diapositivas de presentación.
La visión por computadora en robots es la captura de cosas por un manipulador de acuerdo con los datos de una cámara RGBD.Alexander Syomochkin, Laboratorio de robótica de Sberbank.Acerca de cómo usar la cámara RGBD para capturar objetos con un robot con un manipulador.
Enlace a diapositivas de presentación.
La unificación del desarrollo ROS unificado del mundo.Konstantin Konogorsky, Grupo VIST.La continuación de la historia de la carrera intelectual del Grupo VIST, o cómo combinar lo inextricable.
Enlace a diapositivas de presentación.
ROS Docker lanza una imagen ROS virtual en una computadora Linux.Alexander Syomochkin, Laboratorio de robótica de Sberbank.Informe sobre el uso de Docker para crear y ejecutar una imagen ROS virtual en Linux.
Enlace a diapositivas de presentación.
Qué dispositivos están escuchando y de qué están hablando.Alexander Menshikov, Laboratorio de Robótica Sberbank.Usando ROS para crear servicios de comunicación de voz.
Enlace a diapositivas de presentación.
La reunión de ROS pasada les dio a los participantes muchas emociones positivas e informes interesantes sobre el uso de ROS en la robótica moderna en Rusia, y esperamos desarrollar aún más la comunidad ROS de Rusia con su ayuda. Por lo tanto, invitamos a todos a hacer una presentación en la próxima reunión de ROS el 30 de noviembre de 2019 en Moscú.
forms.gle/G3ggYcvFLfuJw1ur6Además de ROS Meetup, también realizamos pasantías de ROS en el Laboratorio de Robótica de Sberbank para nuestros proyectos, se pueden encontrar más detalles en el
enlace .
Si desea saber más sobre nuestro trabajo o sobre las áreas de desarrollo de la robótica moderna, le recomendamos que lea detenidamente la
revisión analítica anual
del mercado mundial de la robótica .
Nos parece que la primera experiencia de reunir a la comunidad fue correcta y positiva; continuaremos con esto. ¡Y la
próxima reunión de ROS está programada para el 30 de noviembre de 2019 !
Puede participar como oyente completando una
solicitud y esperando la confirmación de su participación en el correo.
