
Un equipo combinado de ingenieros suizos y alemanes transformó una excavadora de andar convencional en un robot autónomo que puede cavar zanjas de una configuración específica. Además, la precisión de la excavación de zanjas es bastante alta: 3 centímetros.
Según los desarrolladores del proyecto, los constructores necesitan tales dispositivos, ya que pueden acelerar el proceso de cavar trincheras en un sitio de construcción. Además, el robot puede cavar una zanja con mayor precisión que una persona (excepto, por supuesto, especialistas de clase alta). Pero hay un problema, por ejemplo, la dificultad de mostrar un mapa del espacio circundante para el robot. Otro problema es la determinación del robot de su propia ubicación en una configuración de sitio que cambia rápidamente.

Pero todo funcionó: los ingenieros, liderados por el científico Marco Hutter, desarrollaron una excavadora autónoma que puede cavar trincheras de varias configuraciones con alta precisión y velocidad. La base para la creación del robot fue la excavadora móvil Menzi Muck M545. Los desarrolladores del robot decidieron reemplazar los sistemas hidráulicos de la excavadora con sistemas "inteligentes", en los que se instalan varios sensores y sensores.
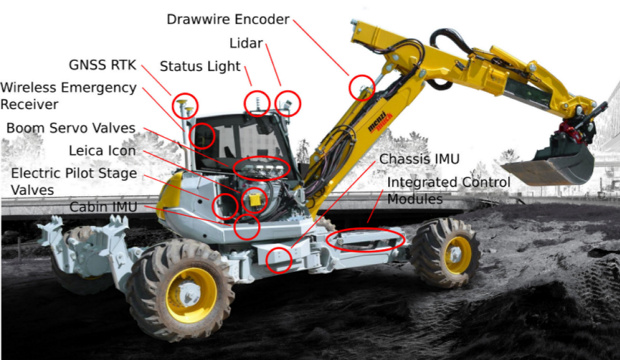
Permiten que el sistema "entienda" y rastree la fuerza de la interacción con el suelo. La excavadora también está equipada con sensores GPS y receptores RTK, lo que aumenta la precisión para determinar la ubicación del sistema, además de las unidades de inercia y los lidares. Gracias al refinamiento, la excavadora aprendió a determinar con precisión su ubicación, al mismo tiempo que "imaginaba" qué tipo de suelo cavar.
Para el robot, se crearon algoritmos especiales que permitieron crear un modelo de entorno, calculando con precisión el sistema de movimientos de la cuchara necesario para crear la zanja de la forma deseada. Una de las dificultades que enfrentan los científicos es que el suelo, después de que el cubo abandona la zanja, se desmorona. Es decir cierta cantidad de tierra vuelve al lugar de su excavación. Los algoritmos brindan esa oportunidad y el excavador "sabe" qué hacer.
Luego se probó el robot en uno de los sitios de construcción, tenía que cavar una zanja con un perfil en forma de trapecio. Después de completar el trabajo, resultó que la precisión del sistema es de aproximadamente 3 centímetros. Y esto es mucho más alto que la precisión obtenida por otros desarrolladores.
En el futuro, este robot excavador se probará en otras condiciones. El resultado debería ser un robot que sepa cómo trabajar por sí mismo, sin supervisión ni apoyo del exterior. Tal robot ayudará efectivamente a los constructores, acelerando el proceso de cavar trincheras.
Este no es el único proyecto del equipo de científicos mencionado anteriormente. Ella ha estado trabajando en la robotización de excavadoras y otros sistemas que trabajan en un sitio de construcción durante varios años. Entonces, una excavadora ambulante similar se convirtió
en una unidad controlada por un operador remoto .