¡Saludos, queridos!
“Corte hidroacústico hidroacústico” ©
Según nuestros artículos anteriores, la situación no ha cambiado fundamentalmente: todavía no hemos explorado la mayor parte del
estanque oceánico del mundo, lo que significa que debemos aumentar la presión.
Entonces, fortalezco cómo puedo.
Hoy hablaré en detalle y "con los dedos" sobre los diferentes tipos de sistemas de navegación subacuática de acuerdo con la clasificación incorrecta establecida, cuáles son, cuáles son los pros y los contras, en general, en qué caso dónde correr, qué presionar y dónde girar.
Achtung: rastros de matan pueden estar presentes en el artículo!
Si las aguas tranquilas de tu alma despertaron esta señal, ¡bienvenido a Kat!
Cuando se trata de
[1] sistemas de posicionamiento acústico, su tipo siempre se indica como USBL, LBL, SBL. "BL" aquí significa Línea de base, es decir línea de base Aquí te propongo y empiezo.
¿Cuál es la línea de base?
La línea base está formada por dos puntos de referencia, cuya posición relativa se conoce en un punto dado en el tiempo. La primera imagen muestra cómo estos puntos de referencia junto con el deseado determinan el conjunto de triángulos espaciales (
), cuya base es la línea de base (
)
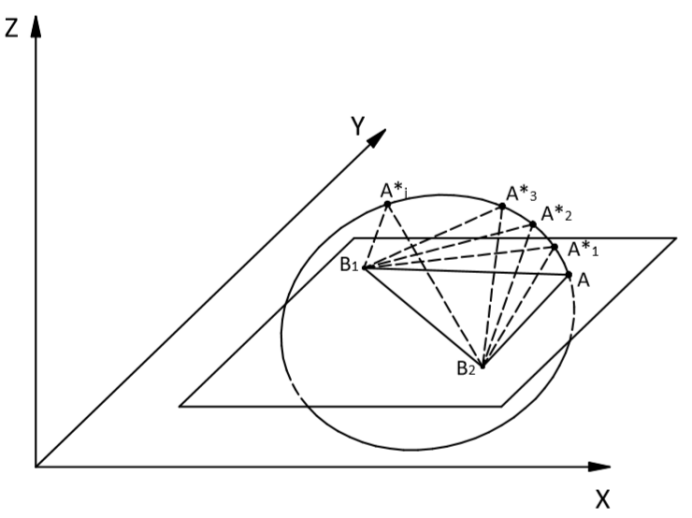 La línea base define el punto deseado en el círculo.
La línea base define el punto deseado en el círculo.El triángulo se define por:
- o en la base y dos rangos, medidos desde ambos puntos de referencia hasta el deseado, en este caso estamos hablando de trilateración;
- o en la base y dos esquinas, que se llama triangulación.
Digresión líricaMientras escribía un artículo, estaba pensando en cómo me metí en él.
Recordé que cuando era niño veía una película en la que en el mundo post-apocalíptico la gente cazaba dragones (lo que causó el apocalipsis), para lo cual calcularon su ubicación en el aire, colocaron "balizas" en el suelo, y claramente he aprendido desde entonces. que para una imagen completa de los faros se necesitaban tres. La palabra "triangulación" está firmemente arraigada en el cerebro adolescente. Recuerdo lo que pensé entonces: qué bueno sería ser un desarrollador de tales cosas.
En realidad, bueno, ¡aquí estoy!
La definición de un triángulo significa la determinación de las coordenadas del punto deseado.
El uso de triángulos para determinar la ubicación se origina a partir de las profundidades de los siglos y las primeras referencias ya están en los trabajos de
Tales [2] y
Euclides [3] .
Una línea de base da muchos triángulos cuyos vértices se encuentran en un círculo. Y para determinar la ubicación del punto deseado en el espacio n-dimensional, se requieren n + 1 líneas de base. El número de líneas de base requeridas se puede reducir a n si se conoce una de las coordenadas del punto deseado, por ejemplo, la profundidad (o altura
de vuelo del dragón ), que a menudo se conoce por medición directa.
La definición anterior de la línea de base generalmente se refiere a los métodos de triangulación y trilateración, pero puede extenderse al método de multilateración [4].
En este caso, los ángulos y rangos hasta el punto deseado son desconocidos, pero la diferencia entre estos últimos es conocida (por ejemplo, el momento de emisión de la señal por el objeto deseado es desconocido, pero los momentos de su llegada a ambos puntos de referencia son conocidos y medidos por relojes sincronizados, es decir, el retraso entre la llegada de la señal a puntos de referencia).
El tiempo de llegada de la señal multiplicado por la velocidad de propagación de la señal se denomina comúnmente pseudorango.
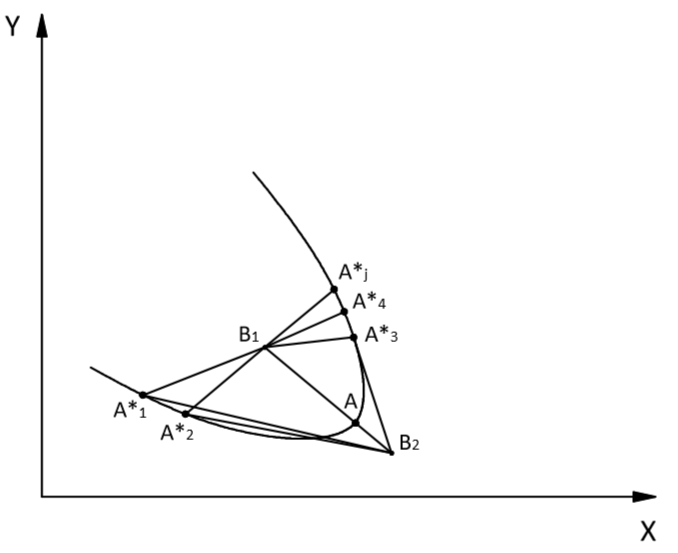 La línea de base para la multilateración determina el punto deseado en la hipérbole.
La línea de base para la multilateración determina el punto deseado en la hipérbole.De la imagen de arriba es fácil ver que de esta manera se puede definir un número infinito de triángulos (
) cuyos vértices que representan la posición del punto deseado se encuentran en la hipérbole. En este caso, los puntos de anclaje serán los focos de la hipérbola.
Aquí, como en el caso de la triangulación, la posición del punto deseado está completamente determinada por n + 1 líneas de base para el espacio n-dimensional.
Mala palabra para controles de exportación
El hecho es que, dependiendo de la ubicación de las coordenadas, hay dos clases de sistemas:
- en realidad navegación (directamente llamada sistemas de navegación), donde las coordenadas se generan en el objeto mismo (como en el GPS).
- sistemas de seguimiento (vigilancia), cuando, por ejemplo, hay algún tipo de baliza en el objeto y la estamos cargando.
Entonces, para el control de exportaciones, esta palabra es muy mala y no es adecuada, lo cual fue verificado trágicamente por nuestra propia experiencia. Explicar a la máquina burocrática que esto "no es en absoluto lo que pensabas" es muy difícil y desde entonces hemos llamado a estos sistemas sistemas de posicionamiento.
Nerdy vogue élEn vista de las ambigüedades de la traducción, vale la pena mencionar que el sistema de posicionamiento no debe confundirse, por ejemplo, con el llamado posicionamiento dinámico en barcos, sistemas de posicionamiento dinámico (Ing. DP, posicionamiento dinámico), esto generalmente es de un área adyacente, pero significa un poco diferente: sistemas que permiten a un barco mantener su posición geográfica y orientación (rumbo), "flotar" en un solo lugar.
Clasificación generalmente aceptada de acuerdo con el tamaño relativo de la línea de base y su incompletitud
Ahora volvamos a las primeras letras de las abreviaturas USBL, LBL y SBL. Determinan el tamaño relativo de las líneas de base.
En general, se determina en relación con el tamaño máximo de la trayectoria posible de un objeto posicionado.
Si es bastante simple de explicar, por ejemplo, forzamos al buzo convencido a colgar el faro del acusado sobre sí mismo y queremos controlar sus movimientos. El "tamaño máximo de la trayectoria posible de un objeto posicionado" es el diámetro del círculo donde se ajustará toda la trayectoria de su movimiento.
Nerdy vogue élPara toda severidad, debe mencionarse que la trayectoria del buzo se entiende en el sistema de coordenadas asociado con la base de medición. Es decir Si seguimos al buzo desde el bote de goma de la embarcación de apoyo y nos desplazamos junto con él, entonces, en principio, podemos derivar unos pocos kilómetros (en realidad, por supuesto, esto no puede ser con buzos, sino con un robot controlado a distancia, completamente). Y es precisamente la trayectoria la que se estima con respecto a nuestro barco.
Está claro que el atributo de clasificación es regular, y estoy completamente de acuerdo. Sin embargo, la clasificación generalmente aceptada está estructurada de esa manera. Y distinguen:
- USBL, línea de base ultracorta: sistemas de base ultracorta, donde las dimensiones de las líneas de base son mucho más pequeñas que la trayectoria del objeto posicionado y
- SBL, línea de base corta: sistemas de base corta donde las dimensiones de las líneas de base son comparables con la trayectoria de un objeto posicionado,
- LBL, línea de base larga: sistemas de línea de base larga donde las dimensiones de las líneas de base exceden significativamente las dimensiones de la trayectoria del objeto posicionado.
Existe una cierta ambigüedad en la elección de clase entre sistemas de base corta y larga y, a menudo, como uno de los signos de los sistemas de base corta, indican una conexión rígida de elementos de soporte entre sí, por ejemplo, cuando se fijan en un barco. Los elementos de soporte del sistema de base larga no están conectados cinemáticamente de ninguna manera, es decir. Los cambios en sus posiciones en el espacio no están correlacionados.
Ahora consideramos los tres tipos y algunas de sus combinaciones con más detalle en términos de sus fortalezas y debilidades.
Sistemas de base ultracorta
Como su nombre lo indica, la línea de base en los sistemas de base ultracorta (sistemas UKB) es mucho más pequeña que la trayectoria del objeto posicionado.
Como regla general, en la mayoría de los sistemas UHF existentes (por ejemplo,
este [5] ,
este [6] y
este [7] ), el tamaño de las líneas de base varía de unidades a decenas de centímetros. La mayoría de ellos son sistemas goniométricos, es decir Sistemas que determinan el ángulo de llegada de la señal de la baliza-respondedor o pinger.
En términos de diseño, tales sistemas consisten en:
- una estación base - un dispositivo que contiene una antena receptora de elementos múltiples, cuyos elementos individuales forman un conjunto de antenas en fase, en este caso, el ángulo de llegada se determina a partir de la diferencia de fase de la señal entrante entre los elementos individuales, o un conjunto de líneas de base, también formadas por pares de elementos individuales, en en este caso, el ángulo de llegada está determinado por diferentes retrasos en la llegada de la señal a los elementos;
Para no alterar los derechos de autor de las imágenes, daré nuestra Zima-Base como ejemplo de una estación base:
En la mesa:

En el momento de trabajo:

- respondedores de baliza que responden a una solicitud de la estación base, lo que a su vez permite determinar el tiempo de propagación de la señal entre la baliza y la estación base (rango inclinado) o pingers, en contraste con los respondedores de baliza, que emiten una señal a intervalos regulares. Pinger se puede sincronizar previamente con la estación base, lo que permite la medición unidireccional del tiempo de propagación.
Como ejemplo, nuevamente daré la baliza de respuesta de nuestro sistema Zima:
Autónomo con cartucho de batería:

TNLA a bordo:

También hay sistemas donde los transpondedores están acoplados eléctricamente a una estación base y la señal de interrogación se suministra como un pulso de puerta eléctrica.
Por lo tanto, la clase de sistemas UKB está representada por un rango bastante amplio de varias ejecuciones específicas y, a menudo, clasificar un sistema como UKB no proporciona suficiente información sobre el método específico de su operación.
La siguiente imagen ilustra el principio generalizado de operación de los sistemas UKB.
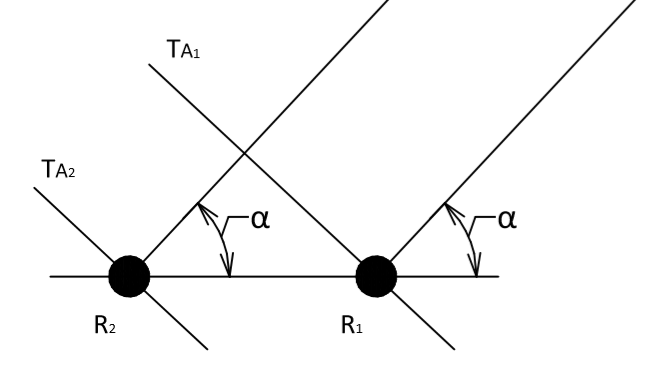 Demostración del principio de funcionamiento de los sistemas que determinan el ángulo de llegada de una señal.
Demostración del principio de funcionamiento de los sistemas que determinan el ángulo de llegada de una señal.La figura anterior muestra un par de transductores de conjunto de antenas que reciben una señal frontal plana. Desde una distancia conocida
entre transductores y retraso medido
determinado por el ángulo
señal de llegada.
Las ventajas obvias de los sistemas UKB incluyen la pequeña composición requerida del equipo y el rápido despliegue del sistema.
En el caso general, el respondedor o pinger puede
envolverse con cinta simplemente fijada en un objeto posicionado, lo que aumenta la universalidad del sistema en su conjunto.
En algunos casos prácticos, el uso de sistemas UKB es indiscutible. Por ejemplo, cuando se realiza una búsqueda de algo
sumergido accidentalmente que se ha hundido y no es posible preestablecer una base larga en vista de la inmensidad del área de búsqueda, o cuando la profundidad del lugar no le permite establecer una base larga flotante, y la instalación de la base inferior no está justificada en términos de plazos y / o clima condiciones
Sin embargo, los sistemas UKB tienen ciertos inconvenientes serios. Por ejemplo, para determinar la posición de un objeto posicionado en coordenadas absolutas, la estación base en sí debe estar completamente definida en el espacio: debe conocer no solo su posición geográfica sino también la orientación de la matriz de receptores en el espacio: ángulos azimutales, ángulos de balanceo y recorte.
Es decir, desde un punto de vista estructural, el sistema UHF debería incluir no solo un conjunto de antenas de elementos múltiples, que en sí mismo es estructuralmente bastante complejo, sino también dispositivos que pueden determinar su posición en el espacio: sensores de inclinación a lo largo de dos ejes horizontales y un sensor rumbo - brújula magnética o GNSS. Si la antena de localización de dirección está instalada en algo bajo el agua, entonces, la posibilidad de usar la brújula GNSS está cerrada.
Además, desde la posición del objeto deseado se estima por dos ángulos de llegada de la señal (horizontal y vertical) o por el ángulo horizontal y la profundidad (que está de moda y progresiva) transmitida en la señal del respondedor o pinger, es obvio que la precisión angular final
los sistemas proporcionarán un aumento con una gama de ambos
El error de la posición determinada del objeto posicionado, que crece con una distancia proporcional a la tangente del error angular, que se ilustra en la siguiente imagen:
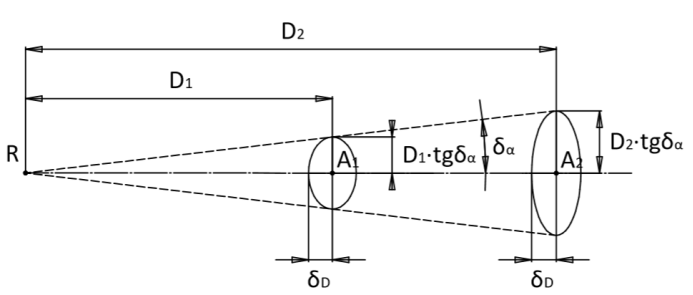 Influencia de la precisión angular de los sistemas UKB en el error al determinar la posición de un objeto posicionado
Influencia de la precisión angular de los sistemas UKB en el error al determinar la posición de un objeto posicionadoLa figura anterior muestra la extensión de la ubicación determinada de la fuente de señal. Uno de los semiejes de la elipse.
determinado por el error al medir la distancia, y el otro, como
donde D es la distancia (rango inclinado) a la fuente.
Además, en el caso de la ambigüedad y la imposibilidad de garantizar la identificación de un haz directo (haz: lea el frente de la señal, llame directamente al que vino directamente de la fuente, sin reflejarse de nada), los sistemas UHF en su conjunto están muy influenciados por la propagación por trayectos múltiples, especialmente si Hay reflejos de la costa o cualquier elemento del paisaje submarino.
En otras palabras, en presencia de potentes señales reflejadas que provienen de otras direcciones (hasta el opuesto), el sistema UHF no es inmune a aceptar dicha señal como directa (ya que en general este problema no tiene solución; la suma de las señales reflejadas puede ser más potente, "más fuerte" que directa y así a veces en la práctica), lo que conduce a resultados completamente incorrectos para resolver el problema de navegación.
Los sistemas más nuevos utilizan la medición directa de la profundidad del transpondedor o pinger, mientras que los sistemas más antiguos determinan la posición en dos ángulos. El hecho es que el ángulo vertical tiene la menor certeza, porque el sonido en su conjunto puede sufrir múltiples reflejos en la superficie inferior, y su definición es relevante solo en las distancias más pequeñas. Esto se muestra en la imagen a continuación, donde se muestra la sección vertical del canal en la imagen superior, y se puede ver que al determinar el ángulo vertical a partir de una de las señales reflejadas, el error puede ser completamente inaceptable. Al mismo tiempo, en la parte inferior de la figura, donde se muestra una vista superior, se ve que todas las señales reflejadas provienen de la misma dirección horizontal.
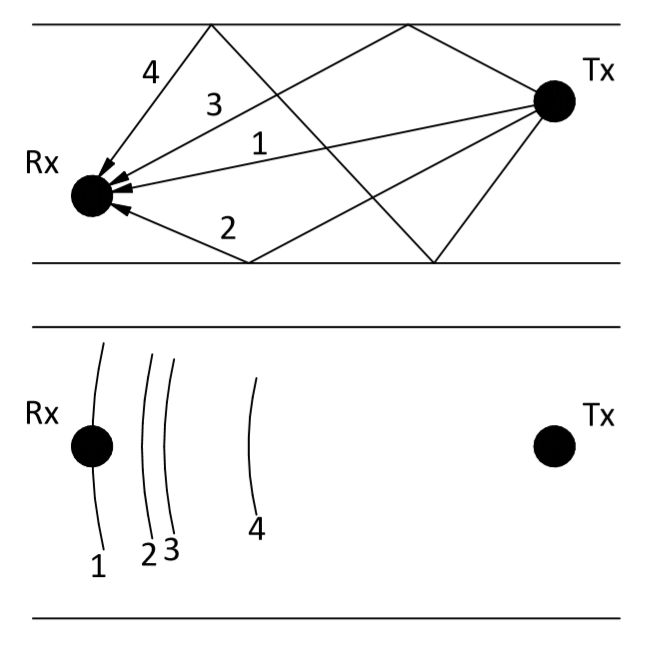 Precisión diferente en la determinación de ángulos horizontales y verticales en sistemas UKB
Precisión diferente en la determinación de ángulos horizontales y verticales en sistemas UKBResumiendo la discusión de los sistemas UCB, podemos decir que su área de aplicación es donde es difícil, injustificado o imposible usar otros tipos de sistemas de navegación y sistemas de posicionamiento.
Los fabricantes de sistemas modernos de UKB informan la precisión angular de sus productos hasta 0.03 ° (1σ)
[8] .
Su ventaja: velocidad de despliegue y versatilidad.
Por la experiencia de comunicarme con los usuarios, puedo decir que todos los que están cerca solo quieren UKB solo por la velocidad de implementación. Y no importa cuánto explique, no importa cuánto escriba, todos asienten, pero todavía quieren usar la UCB. Como dice el refrán: "no te olvides de sufrir".
Algunas personas sin experiencia generalmente usan la abreviatura USBL como designación para cualquier sistema de posicionamiento submarino.
Nerdy vogue élUna curiosidad aún más curiosa es cuando cualquier cosa hidroacústica se llama sonar. Somos hombres alfabetizados, y recordamos que un sonar es como un radar, solo con sonido, es decir, sonar, pero esta es una historia completamente diferente.
Sistemas de base corta
Los sistemas de base corta en la gran mayoría de los casos están ubicados en los cascos de embarcaciones especializadas. Es decir, las dimensiones de las líneas de base son comparables a las dimensiones del recipiente.
En la actualidad, la precisión de los sistemas UHF es bastante alta, y la conveniencia del uso parece mucho más rentable que para KB, lo que llevó a desplazar a los sistemas KB del uso generalizado, y las tareas resueltas por los sistemas KB ahora incluyen solo aquellos que tienen condiciones específicas que no permiten aplicar el sistema UKB.
Sin embargo, en el pasado, las oficinas de diseño se usaban, por ejemplo, para escoltar al batiscafo Triest-1 al lugar de la muerte del submarino Thresher de la Marina de los EE. UU. El sistema SHARPS SBL KB se utilizó en la Institución Oceanográfica Woods Hole para acompañar al vehículo de alta mar JSON a su puesto de descenso MEDEA, se informa la precisión de posicionamiento alcanzada de 0.09 m [9].
De los sistemas KB modernos
, se puede observar
esto [10] , que el fabricante posiciona como "GPS submarino" y se distribuye como diseñador.
Para que el ojo capte y sienta todo el encanto y la "simplicidad" del despliegue, les daré un par de fotos de nuestras pruebas recientes del prototipo del sistema KB para estacionar un vehículo submarino autónomo:

El marco de aluminio es la base corta. Puedes imaginar la conveniencia de lanzar este diseño.

Para ser justos, vale la pena decir que a lo largo de la ideología del trabajo, solo debería reducirse una vez. También tuvimos que aumentarlo durante las pruebas: el perfil cuesta dinero y los hidrófonos no se encuentran en la carretera.
Resumiendo la revisión de los sistemas KB, observamos que:
Las ventajas de los sistemas KB incluyen:
- velocidad de despliegue y movilidad (los sistemas generalmente se montan en un barco);
- en promedio, mayor precisión en comparación con los sistemas UKB (aunque, sin embargo, debe tenerse en cuenta que algunos UKB de clase alta, por ejemplo [8] , generalmente muestran una mayor precisión de posicionamiento que algunos KB más simples como el GPS Waterlinked ya mencionado [10] ) .
Por contra, KB puede incluir las mismas desventajas inherentes a los sistemas UHF, a saber:
- la necesidad de determinar la orientación de la base de medición (líneas de base): en las esquinas del recorrido, rodar y recortar además de estar atado a la posición geográfica absoluta;
- correlación de errores en la determinación de tiempos de llegada en elementos base en vista de su conexión cinemática, por ejemplo, debido al cabeceo
- y, dado que una oficina de diseño generalmente puede funcionar como un sistema goniométrico, también está sujeto al problema de disminuir la precisión al mover un objeto posicionado desde la base.
- ( «») .
Estos son mis tipos de sistemas favoritos. DB: significa Base larga , no lo que pensabas . Las dimensiones de las líneas base son mucho más grandes que la trayectoria del objeto posicionado, y los elementos base no están conectados cinemáticamente entre sí. Como regla, una base puede ser un fondo, como [11] y [12] , cuando sus elementos se encuentran en la parte inferior, o puede flotar cuando los elementos de soporte son boyas equipadas con receptores GNSS, aquí podemos citar sistemas como ejemplos [13 ] y [14] , sistemas GPS GNSS [15] , GLONASS [16], Galileo [17] , Beidou [18] y algunos de sus predecesores: los sistemas DECA [19], Chaika [20] y LORAN [21].Los sistemas DB proporcionan la máxima precisión para determinar la posición de un objeto posicionado porque el tamaño es importante y carecen en gran medida de muchas desventajas de los sistemas UCB y KB, como reducir la precisión al alejarse de la base: DB proporciona en promedio la misma precisión dentro de la base de navegación y al salir un objeto posicionado desde él puede continuar funcionando como un sistema goniométrico.Los sistemas de DB son mucho menos susceptibles a los errores asociados con la propagación por trayectos múltiples, como se mostrará a continuación: si el haz directo se determina incorrectamente, la diferencia de tiempo de viaje puede ser pequeña (unidades de metros), lo que se puede compensar fácilmente por la presencia de puntos de referencia en exceso, en el peor de los casos un error al determinar la ubicación del orden de la diferencia en la trayectoria del haz, mientras que el UCB podría estimar el ángulo de llegada de este haz, que puede llegar a ser casi cualquier cosa, lo que a su vez conduce a error totalmente inaceptable.De los inconvenientes de los sistemas DB, los principales son la complejidad de la instalación, lo cual es especialmente cierto en el caso de la base inferior: en primer lugar, los elementos inferiores deben proporcionar suficiente autonomía para maximizar el intervalo de tiempo de servicio y, en segundo lugar, porque Como regla general, tales sistemas operan a profundidades considerables (desde 500 metros y más), luego se imponen requisitos adicionales a los edificios normobáricos, en tercer lugar, existe un problema adicional de quitar la base al finalizar el trabajo.Y finalmente, después de instalar la base, la ubicación de sus elementos debe determinarse con precisión geodésica, por ejemplo, utilizando el método de base de datos virtual o los sistemas UCB utilizando una gran selección de mediciones.Todas estas operaciones requieren equipos especializados y costosos y la mano de obra de muchos especialistas altamente calificados.Mucho más simple es el caso con la base flotante. Las boyas de recepción, transmisión o recepción y transmisión hidroacústica se pueden instalar desde casi cualquier bote (lo configuramos en 15 minutos desde un bote inflable de remo), en vista de la simplicidad de instalación y extracción, los elementos de soporte pueden tener poca autonomía, y sus cascos generalmente se pueden hacer atmosféricos rendimientoVale la pena decir que el uso de una base flotante es muy complicado cuando se trabaja a grandes profundidades por dos razones: la primera es la dificultad de instalar un ancla, que en principio se resuelve con una base flotante motorizada, que garantiza la preservación automática de la posición geográfica, y la segunda es más grave, y a menudo excluye el uso de una base flotante cuando se trabaja a grandes profundidades: la presencia de una reflexión interna total de la señal desde la capa de salto (es decir, la capa del salto en la velocidad del sonido. La separación de las capas de agua con diferentes densidad, desde la cual el sonido puede reflejarse completamente).La única solución aquí es mover la antena hidroacústica debajo de la capa de salto, lo que a su vez crea aún más problemas: la complejidad del posicionamiento topográfico de la antena hidroacústica, el peso del cable, un diseño muy complicado, y aquí estamos nuevamente donde comenzamos.Tradicionalmente, como ejemplo visual, traigo nuestro sistema RedWAVE DB, boyas (un buzo es único y no está incluido): Y el receptor de navegación:
Y el receptor de navegación:
Tenemos varios artículos sobre este sistema. Sistemas virtuales de base larga
Sistemas basados en los llamados la base larga virtual [22] [23] [24] (VDB, inglés VLBL - línea de base larga virtual) merece ser asignada como un grupo separado por razones de diseño y diseño.La esencia de los sistemas VDB es que los rangos inclinados al transpondedor o los tiempos de llegada de la señal pinger se miden en diferentes puntos en el espacio, este enfoque es verdadero si se cumple una condición: el objeto posicionado mantiene una posición fija, y el punto de referencia móvil forma elementos de la base de navegación al hacer o medir la distancia al demandado o fijando los tiempos de llegada de la señal pinger desde diferentes posiciones.Esta clase de sistemas de navegación, con todas sus limitaciones aparentes, tiene las perspectivas más amplias: en primer lugar, no requiere ningún equipo complejo, como en el caso de los sistemas UHF: la tarea se resuelve nominalmente solo con dos transceptores o con un transmisor y receptor, que no son necesarios o de una manera especial para orientarse en el espacio. En el caso de un pinger, es posible organizar una búsqueda cooperativa de un pinger utilizando una bandada de vehículos de superficie autónomos. Esto es especialmente cierto cuando se buscan objetos hundidos (por ejemplo, aviones o barcos estrellados) en un área teóricamente ilimitada. Además, uno de los métodos para determinar inicialmente la ubicación de los elementos de la base larga inferior es el método WDB.Como ejemplo, daré nuestro proyecto de demostración (¡incluso dos!) De una base virtual larga en dos micro módems uWAVE.El primer borrador se describe en uno de nuestros artículos anteriores . Allí, el módem, el módulo GNSS y el módulo de radio se combinaron usando una placa en el STM32.En la nueva reencarnación de este proyecto, el código se reescribió en Arduino UNO y la solución al problema de navegación se realiza en una aplicación de código abierto .Sistemas combinados
Los sistemas combinados generalmente contienen elementos de dos o más clases de sistemas. Entonces, por ejemplo, hay soluciones técnicas descritas en la revisión [1] que combinan una base larga desplegable y una base corta montada en un barco, cuya tarea principal es posicionar los elementos de una base larga. Obviamente, el posicionamiento de los elementos de una base larga también se puede llevar a cabo con la ayuda de los sistemas UKB.En general, se puede afirmar que la elección de un esquema de síntesis particular está determinada, por extraño que parezca, por el problema que se está resolviendo.En la abrumadora mayoría de los casos, el objetivo de la síntesis de diferentes clases de sistemas es el posicionamiento inicial de los puntos de soporte de una base larga.Exotico
Aquí solo tocamos brevemente algunas clases de sistemas, tan pronto como indirectamente y formalmente relacionados con el tema del artículo.Entre ellos, los sistemas acústicos basados en cálculos muertos se basan en los llamados Registros Doppler, dispositivos que miden la velocidad de un objeto posicionado con respecto al fondo mediante la emisión de una señal acústica en al menos tres rayos dirigidos estrechamente y su posterior recepción. El movimiento del objeto con respecto al fondo conduce a la aparición de un cambio de frecuencia Doppler de la señal emitida detectada en la etapa de recepción.El cambio Doppler se recalcula en la proyección de la velocidad a lo largo de tres ejes. En combinación con las lecturas del sensor de rumbo (brújula) y las lecturas del acelerómetro, se forma una secuencia de decisiones para la ubicación del objeto. El inicio de esta secuencia requiere un posicionamiento inicial. Este tipo de sistema tiene principalmente aplicaciones militares en vista del relativo secreto y autonomía. Tiene todos los inconvenientes de los sistemas de ajuste de cuentas asociados con la rápida acumulación de errores. Es decir
La precisión disminuye con el tiempo.Todavía hay exótico-exótico y bastante exótico. Al primero, recomendaría sistemas basados en el análisis de imágenes de fondo ( CARL! ), Y al segundo, navegación a través de las fluctuaciones del campo magnético ( CARL !!! ). Con respecto a la aplicabilidad práctica de ambos, quiero, como dicen, "expresar una seria preocupación".En el residuo seco
Entonces, en la clasificación existente hay tres clases principales de sistemas de navegación sonar:- , - . , , , . [1] 0.5-0.2% .
- , ( ) , ; , -, , [1] , 0.5% ;
- Línea de base larga, en la que la ubicación del objeto está determinada por tres o más rangos inclinados (o diferencias), medidos en tres o más puntos de referencia ampliamente espaciados. Esta clase de sistemas es difícil de usar y mantener, puede implementarse en dos versiones muy diferentes: las bases inferior y flotante y, según el autor [1], tiene la máxima precisión en comparación con otras clases de sistemas: alrededor del 0.1% de la profundidad del lugar. En el mismo lugar, en la revisión de Vickery que ya borré, los valores absolutos del error de posicionamiento del objeto posicionado se informan para sistemas que operan en diferentes rangos de frecuencia: desde 2-3 metros para sistemas de baja frecuencia (hasta 15 kHz), hasta 1 metro para sistemas de frecuencia media (19-36 kHz) y hasta 5 cm para sistemas que funcionan a frecuencias de 50 a 110 kHz.
PS
Muchas gracias por su atención, estaremos encantados de escuchar críticas constructivas y responder preguntas.
Si este artículo causará interés entre los lectores, en el próximo planeo hablar sobre la clasificación correcta de los sistemas de navegación subacuática.
Si todo va bien, en otro artículo analizaré varios algoritmos para la operación de sistemas de navegación con ejemplos de código.
Lista de fuentes- Vickery, K. (sf). Sistemas de posicionamiento acústico. Una descripción práctica de los sistemas actuales. Actas del taller de 1998 sobre vehículos autónomos subacuáticos (Cat. No.98CH36290).
- Diógenes Laercio. Las vidas y opiniones de filósofos eminentes por Diogenes Laertius (Traducción de Yonge, CD). Londres: George Bell e hijos, 1905. Google books. Web 01 abr. 2019.
- Frankland, William B., El primer libro de los elementos de Euclides: con un comentario basado principalmente en el de Proclus Diadochus. Cambridge: en la University Press, 1905 .
- Limitaciones de precisión de los sistemas de multilateración hiperbólica, Harry B. Lee, Instituto de Tecnología de Massachusetts, Laboratorio Lincoln, Nota técnica 1973-11, 22 de marzo de 1973
- evologics.de/usbl
- www.tritech.co.uk/media/products/usbl-tracking-system-micronnav.pdf
- www.ixblue.com/products/posidonia
- www.ixblue.com/sites/default/files/2018-02/Gaps.pdf
- Integrando el posicionamiento relativo de precisión en las operaciones de ROV de JASON / MEDEA, Bingham et al., MTS Journal Spring 2006 (Volumen 40, Número 1)
- waterlinked.imtqy.com/docs/explorer-kit/introduction
- www.ixblue.com/sites/default/files/2019-01/Ramses%20-%20Datasheet.pdf
- evologics.de/web/content/16763?unique=cc5bc295cb0a4bf681a31de24fdb204f62169c2b&download=true
- github.com/ucnl/Docs/blob/master/RU/RedWAVE/RedWAVE_LBL_Deployment_maintenance_RedNAV_ru.pdf
- www.alseamar-alcen.com/sites/alseamar-alcen.com/files/pdf/products/fiche_205x292_gib-sar.pdf
- www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf
- "El sistema global de navegación GLONASS: desarrollo y uso en el siglo XXI". 34ª Reunión anual de tiempo preciso e intervalo de tiempo (PTTI). 2002.
- download.esa.int/docs/Galileo_IOV_Launch/Galileo_factsheet_2012.pdf (PDF). ESA 15 de febrero de 2013. Consultado el 8 de diciembre de 2019.
- "Indicaciones 2017: el camino de BeiDou hacia el servicio global". GPS World. 6 de diciembre de 2016.
- Derek Howse, radar en el mar. Macmillan Press, Gran Bretaña 1993. ISBN 1-55750-704-X
- GOST R 54025-2010 Sistema de radio navegación "La Gaviota". Dispositivos receptores. Requisitos para especificaciones técnicas. Métodos de prueba y resultados de prueba requeridos
- The Development of Loran-C Navigation and Timing, Gifford Hefley, Oficina Nacional de Normas de EE. UU., Octubre. 1972.
- MB Larsen, "Navegación de línea de base sintética larga de vehículos submarinos", presentado en la Conferencia y Exposición Oceans 2000 MTS / IEEE, 2000.
- João Saúde, Antonio Pedro Aguiar, Single Beacon Acoustic Navigation para un AUV en presencia de corrientes oceánicas desconocidas, IFAC Proceedings Volumes, vol. 42, número 18, 2009, pp. 298-303, ISSN 1474-6670, ISBN 9783902661517, doi.org/10.3182/20090916-3-BR-3001.0057 .
- Alexander Dikarev, Stanislav Dmitriev, Vitaliy Kubkin, Andrey Vasilenko. Estimación de posición de sensores submarinos autónomos utilizando el método virtual de línea de base larga, International Journal of Wireless & Mobile Networks (IJWMN), vol. 11, número 2, abril de 2019