¡Saludos, queridos!
"Si, en respuesta a la solicitud de un amigo o enemigo, es incorrecta, la segunda solicitud ya llegará con la frecuencia 533 " (C)
“Todo esto te pasa de alguna manera. O a través de ti. Y para mí va como una aplanadora. No quedaba un solo hueso. "(C) A. y B. Strugatsky," Ciudad condenada "
¿Alguna vez se ha preguntado cómo se vería bajo el agua, digamos, boxeando o caminando?
Antes de que realmente tuviéramos tiempo para disfrutar de todos los encantos de Internet de las cosas,
ya se convirtió en una palabra de parada al considerar las solicitudes de subvenciones científicas, ya que comenzaron a aparecer publicaciones científicas y no tan sobre cómo resistir los ataques cibernéticos en los sistemas de posicionamiento de sonar, y (¡Dios mío! ) a la red submarina de sensores autónomos!
Solo un par de párrafos de suspenso técnico y prometo explicar todo.

Estás bien, estás sentado al otro lado del monitor y estás leyendo otro análisis. Y todavía siento vergüenza falsa cuando respondo la pregunta de lo que hago. Sabes, muchos ni siquiera sospecharon que transmitir datos bajo el agua es algún tipo de problema. O, digamos que el GPS no funciona bajo el agua.
¿Qué está pasando en absoluto?
Expongamos de inmediato las condiciones. Tener algo en lo que confiar. Ahora le proporcionaré un par de trucos para estimar "a simple vista".
Una
banda de frecuencia muy
estrecha está disponible para la comunicación del sonar, aproximadamente, desde unidades hasta decenas de kilohercios. El sonido a diferentes frecuencias se desvanece de manera desigual.
Si tomamos el mar "promedio", el coeficiente de atenuación:
- para sonido con una frecuencia de 1 kHz es de aproximadamente 0.1 dB / km
- para sonido con una frecuencia de 10 kHz - 1 dB / km
- y para sonido con una frecuencia de 100 kHz, 10 dB / km sin piedad.
¿Qué significa esto? Esto significa que si trabaja con una señal de banda ancha, entonces
diferentes partes del espectro se propagarán de manera muy diferente .
Estoy de acuerdo, estos decibelios también siempre me confunden y "regañaron la raíz del hertz".
Si todo se simplifica enormemente, entonces el rango de comunicación promedio:
- a frecuencias en la región de 1 kHz puede alcanzar decenas de kilómetros (con un cierto porcentaje de suerte - cientos)
- a frecuencias del orden de 10 kHz - 10 kilómetros
- y en frecuencias en la región de cientos de kilohercios - cientos de metros, y Dios no lo quiera si al menos ninguno tiene éxito.
Una fórmula muy aproximada para estimar la frecuencia de la señal para lograr el rango requerido es la siguiente:
$$ pantalla $$ kHz = 40 / km ^ {2/3} $$ pantalla $$
O, si necesita averiguar qué rango teóricamente proporcionará una señal de una frecuencia dada:
$$ display $$ km = (40 / kHz) ^ {3/2} $$ display $$
En el rango de 1 a 100 kHz, la fórmula es más o menos cierta.
A frecuencias del orden de 20 kHz, se puede esperar un rango de comunicación de 2-3 km, y en frecuencias en la región de 100 kHz - 300 metros. Tales cosas
Los ruidos, de cualquier pieza de metal grande, generalmente son de baja frecuencia y se extienden a distancias lejanas.
Si queremos transmitir datos digitales, entonces, desde las consideraciones humanísticas más generales, con bastante optimismo, podemos esperar modestamente una velocidad de transmisión de 5 kbps por banda de 10 kHz, siempre que el ancho de banda de la señal sea superior a 10 kilohercios.
La velocidad del sonido es un promedio de 1.500 m / s. Esto significa que por cada kilómetro y medio de alcance, el retraso asociado con la velocidad de propagación de la señal aumentará en 1 segundo.
Vamos a dar sentido a estas cantidades. Si transferimos condicionalmente algún tipo de solicitud de, digamos,
10 kilómetros , entonces podemos aceptar la respuesta no antes de
14 segundos . En uno de los experimentos, se esperaba una señal de respuesta durante más de dos minutos y medio, porque el suscriptor estaba a una distancia de 120 kilómetros.
Ahora ni siquiera toco los problemas asociados con el hecho de que la velocidad del sonido depende en gran medida de la densidad del agua. Las capas de agua de diferentes densidades no se mezclan en los mares y el sonido puede reflejarse completamente desde el límite de dos capas, es decir. en algún lugar, la señal simplemente no irá a donde se necesita. Sin obstáculos visibles.
Ruido, trayectos múltiples y Doppler. Todos los mares, océanos y ríos son ruidosos. Especialmente fuerte a frecuencias inferiores a 10 kHz. El sonido se refleja desde el fondo, los detalles del paisaje submarino, la superficie, los reflejos se suman en el punto de recepción, la trayectoria de las olas se dobla como resultado de la refracción. Los módems hidroacústicos pueden mantenerse en contacto durante millas, pero no escucharse entre sí a través de una densa capa de algas marinas, estando a un metro de distancia el uno del otro.
Es bueno si intentamos trabajar en alta mar. Por ejemplo, la profundidad es un kilómetro, la distancia es 10, en proporciones parece un baño. A continuación, en la imagen de Wikipedia, el trazado de rayos es visible:

¿Pero qué pasa con un cuerpo de agua poco profundo? El verano anterior, los colegas trabajaron a una distancia de 800 metros con una profundidad de 4 metros. Geométricamente, este es un charco en el pavimento. Distancia a la relación de profundidad 200: 1. Imagine cuántas veces el sonido rebotará en la parte inferior y cómo se formará en el punto de recepción.
Todo esto lleva al hecho de que el canal de comunicación hidroacústico es muy complejo y muy inestable.
Redes de sensores?
La frase de servicio suena algo así como que el 95% de todo el océano es desconocido para nosotros. Es muy tentador colocar algunos "nodos" en la parte inferior (o incluso en la columna de agua) que miden algunos parámetros ambientales, los acumulan y, según la demanda, los transfieren a alguna parte de la cadena. Por ejemplo, en un barco científico
militar que pasa por encima de ellos.
El consumo de energía realista promedio de tales piezas en un modo de transmisión de 5-15 vatios. Incluso si suponemos que el dispositivo pasa la mayor parte del tiempo en un sueño como un gato noble, en función de la velocidad de transmisión y la frecuencia aproximada de las sesiones de comunicación, resulta bastante obvio que con una duración de batería razonable, la mayor parte de este dispositivo será la batería . Unas pocas decenas de kilogramos de litio, la mayoría de los cuales nadie levantará del fondo, porque se lavará con lodo, crecerá con conchas, se pudrirá y, en general, es "económicamente no rentable".
Recuerde que tal cosa simplemente no puede funcionar todo el tiempo, o al menos a menudo, como un panal o un enrutador WiFi doméstico, aunque se encuentra completamente indefenso en la parte inferior y no está protegido de ninguna manera.
Aquí tendría que dar un ejemplo de dicha red de sensores. Bueno, aquí están:
Todas estas redes de prueba están, por así decirlo, en la accesibilidad "remando" desde la costa. Todos pertenecen al proyecto europeo
FP7-SUNRISE .
A continuación se muestra un diagrama del sitio web del proyecto que ilustra las ubicaciones y funciones de diferentes laboratorios y sitios de prueba:

El éxito del proyecto es difícil de juzgar.
Se han publicado muchos artículos .
El presupuesto total es de
5 320 023 euros . Entre las reflexiones se encuentran muchas universidades europeas, el centro belga de ciencia y tecnología de la OTAN.
Estado del proyecto:
cerrado el 31 de diciembre de 2016 .
Hay muchas redes de prueba pequeñas diferentes, que en su mayoría son eventos únicos. Aquí hay una pareja que me llamó la atención:
Me parece que los principales problemas son que, para el uso real de esas piezas con una carga útil, es necesario llevar la tecnología a tal estado que los nodos de la red estén listos para vuelos espaciales de larga distancia, nada más y nada menos, arrojados al agua, y mentalmente decir adiós. Cualquier complicación con las baterías y el mantenimiento priva la idea de significado.
¡Otra cosa son los planeadores diferentes!
La fuerza impulsora de todos estos proyectos se ilustra en una imagen del sitio web de la robótica líquida hija de Boeing:
Hermoso video sobre qué es Wave-glider y cómo funciona:
¿Qué es solo un planeador y cómo funciona?
Si el primero tiene una plataforma de superficie, que es visible, entonces el segundo puede hacer snorkel en los mares y océanos durante semanas y meses
(¡más de un año!) , Rara vez, rara vez surfea la superficie.
La conversión e implementación de tecnologías de defensa no se ha cancelado, por supuesto, podemos esperar que sí. En cualquier caso, planeadores y planeadores de onda: esto es a gran escala, es grave y durante mucho tiempo.
Pero la conclusión es ...... que todo se dirige a la confrontación de vehículos autónomos con sello de transportador por un lado y submarinos nucleares por el otro, con la única diferencia de que en el caso de este último, el lanzamiento de cada uno de estos "primeros entre iguales" se celebra como un día festivo. Bueno, al diablo con un trozo de hierro, solo en cada uno de ellos hay docenas de submarinistas vivos altamente calificados.
Entonces, ¿qué hay de caminar bajo el agua y el boxeo?
Al igual que los drones aéreos, los submarinos tampoco son reacios a comprender dónde están, también sería bueno poder mantenerse en contacto con ellos, incluso cuando las cosas están inmersas.
En los últimos años, simplemente ha habido un montón de publicaciones sobre el tema de contrarrestar con precisión ciertos ataques cibernéticos efímeros en redes de sensores subacuáticos y sistemas de posicionamiento subacuáticos.
El dato para los autores de dichos artículos es la suplantación de identidad, cómo definirlo y cómo tratarlo.
Parece que el asunto es extremadamente simple: simplemente tome un modelo de los sistemas de navegación por satélite, cambie la velocidad de la luz a la velocidad del sonido, y aquí parece ser un campo completamente nuevo de ciencia y tecnología.
Veamos en qué suposiciones se basa todo esto.
Generalmente se distinguen dos tipos de suplantadores: los que están en la superficie del agua y los que están en la columna de agua. Los primeros determinan sus propias coordenadas usando GNSS, y los segundos usan el sistema de navegación sonar, con el cual deben confrontar.
En las publicaciones, por regla general, estamos hablando de un tipo de sistema de navegación hidroacústica de largo alcance que debe verse comprometido. Pero prometí mitos y realidad, por lo que analizaremos todos los tipos principales de sistemas de navegación de sonar y cómo pueden o no superarse, incluso aquellos que claramente no son adecuados para posicionar nodos de la red submarina, ni móviles ni estacionarios. Suponemos que el atacante conoce todos los algoritmos de modulación y demodulación de las señales, todos los retrasos y los tiempos del sistema, las frecuencias, las codificaciones y los detalles más pequeños.
Entonces
Sistemas de telémetro y goniómetro
Estos son aquellos en los que se mide el ángulo y la distancia al punto deseado para resolver el problema de navegación.
Puede haber varias opciones para el funcionamiento de dicho sistema.
Desde el punto de vista de la ubicación de la antena de búsqueda de dirección:
- Recepción en la víctima móvil
- Transmitiendo en una baliza de accionamiento estacionaria. La antena en este caso debe estar orientada en relación con los puntos cardinales de una manera conocida por la víctima móvil.
Desde el punto de vista del método para determinar la distancia:
- Método de solicitud-respuesta
- Por pre-sincronización, la baliza del disco emisor
- Iniciar "solicitud-respuesta" para la sincronización, luego emitir periódicamente una baliza de unidad
Si se utiliza el método de solicitud-respuesta, entonces la única opción para falsificar es estar más cerca de la víctima que la baliza de la unidad. Aquí todo es muy simple: la señal de navegación en promedio tiene una duración tangible y, por último, la duración expresada en distancia (multiplicada por la velocidad del sonido).
Estamos hablando de decenas y cientos de milisegundos, es decir. alrededor de decenas y cientos de metros. El altavoz debe recibir la señal de solicitud de baliza y emitir una respuesta, simulando el retraso requerido para formar la imagen de la víctima del altavoz a qué distancia está de la baliza de la unidad.
Es
imposible cambiar el ángulo de llegada de la señal, ya que la víctima la evalúa objetivamente. Todo lo que el spuffer puede hacer en esta situación es cambiar el ángulo físicamente, simplemente estar del lado derecho de la víctima.
Además, el spuffer no debe permitir una situación en la que su señal "falsa" se superponga con la señal real de la baliza de accionamiento en la víctima, en este caso, con una probabilidad muy alta de que la víctima no reciba ninguna señal.
Si bien el esquema es delgado y, en teoría, incluso peligroso. ¿Por qué está completamente inoperante? Un poco más tarde.
Si se utiliza el método de pre-sincronización, el spoofer, por un lado, tiene cierto margen de acción: no es necesario estar más cerca de la víctima que la baliza de accionamiento, simplemente puede encajar en la transmisión periódica entre las señales de baliza.
Por otro lado, está más conectado por el período de emisión de la baliza de accionamiento; puede ser que la señal de reemplazo simplemente no encaje en la brecha entre las reales.
La opción con sincronización primaria por el método de solicitud-respuesta y la transmisión posterior de la baliza de la unidad nuevamente, le brinda más oportunidades al spoofer si puede realizar una sustitución en el momento de la sincronización primaria.
La opción con una antena de matriz en fase radiante en una baliza de accionamiento es aún más peligrosa para la víctima. Si en casos anteriores fue imposible cambiar el ángulo de llegada de la señal, entonces en esta configuración, al cambiar los retrasos de radiación entre diferentes elementos del conjunto de antenas en fase, se puede formar cualquier ángulo deseado en la "conciencia de la víctima".
Todo suena bastante lógico y muy fácil caer en este cebo.
Pero, de hecho, todos los métodos que describí anteriormente también son completamente inoperantes. Solo recuerda esto por ahora.
Sistemas de telémetro
Aquí, en la gran mayoría de los casos, hay puntos de referencia distribuidos sobre la superficie o el fondo, cuyas coordenadas la víctima conoce de antemano o estos puntos de referencia transmiten constantemente. De nuevo, puede haber todas las opciones anteriores para determinar el rango: "solicitud-respuesta", pre-sincronización, etc.
Todo aquí es muy similar a un sistema de goniómetro, con la única diferencia de que el altavoz debe estar más cerca de todos los involucrados en el proceso de los puntos de control. Toma la señal de solicitud de la víctima de la misma manera, reemplaza, si es necesario, las coordenadas del punto de referencia actual (recuerde, ¡el spuffer conoce todos los esquemas de modulación-demodulación y formatos de paquete!), Forma los retrasos requeridos en la medida de lo posible. Obviamente, en este caso se imponen restricciones serias a la ubicación del spuffer (debe estar más cerca que todos los puntos de referencia, e incluso los retrasos no pueden ser demasiado grandes) existe el peligro de superponer una señal real y de intercambio en la víctima.
Y este esquema tampoco se puede usar.
Sistemas de telémetro de diferencia
Casi completamente similar a los anteriores: los puntos de referencia se encuentran en la superficie del agua o en el fondo, pero ahora la víctima no irradia nada, solo escucha. El funcionamiento de tales sistemas repite completamente la ideología GNSS: ambos satélites transmiten sus ubicaciones y los puntos de referencia en el sistema de posicionamiento hidroacústico transmiten sus ubicaciones de acuerdo con el reloj, sincronizado con todos los demás puntos de referencia.
Por lo general, por alguna razón, este sistema se considera el más susceptible a los ataques de suplantación de identidad. Lo más probable es que su trabajo se basa en casi las mismas ecuaciones que los sistemas GNSS.
Entonces, aquí todo sucede de acuerdo con la misma idea de que al estar más cerca de la víctima que los puntos de referencia reales, el spuffer transmite una señal de reemplazo para que llegue a la víctima antes que las señales reales. Porque Dado que los momentos absolutos de radiación no juegan un papel, el altavoz puede transmitir señales mucho antes que los puntos de referencia. Solo las diferencias en los tiempos de llegada de las señales a la víctima son importantes.
Conclusión
Las tres clases de sistemas a primera vista parecen susceptibles a ataques de suplantación de identidad, ¿qué hay de malo en estos argumentos?
De hecho, todo es muy simple: la velocidad notablemente baja de propagación de la señal juega un truco en el spuffer. Para reemplazar algo allí, debe conocer con mucha precisión no solo su ubicación y la ubicación de los puntos de control o la baliza de la unidad, ¡debe conocer la ubicación de la víctima!
¡Diablos, para resolver un problema de navegación, primero debes resolver un problema de navegación al menos tres veces!
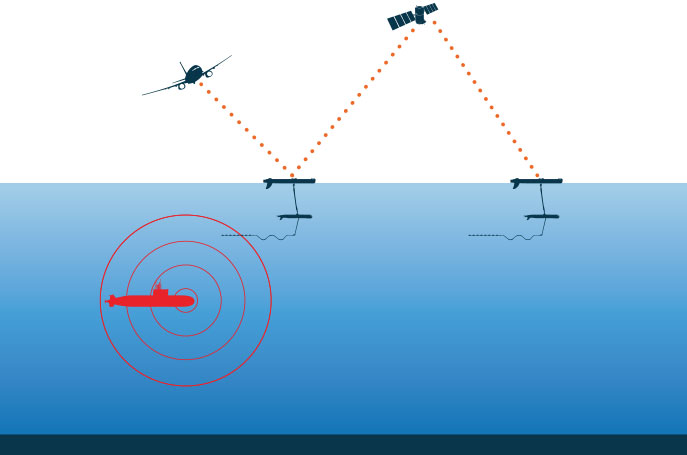
Este spoofer aerotransportado sabe dónde vuela el "liberador" y puede alimentarlo con datos GNSS falsificados. Bajo el agua, esto puede hacerse solo dentro de la línea de visión, es decir, son unos pocos metros, tal vez una docena en el caso más optimista.
¿Pero los autores de estas publicaciones realmente se han perdido un detalle tan simple?
Por supuesto que no. Creo que entienden todo perfectamente. En la parte de publicaciones (principalmente en redes de sensores subacuáticos), esta pregunta no se plantea en absoluto, en otras, se propone determinar la ubicación de la víctima en los artículos ... ¡por sonar!
Y en el caso de un spoofer en la columna de agua, que en sí mismo no sabe dónde está (un sistema de goniómetro de accionamiento, por ejemplo, no lo ayudará de ninguna manera; es para poder llegar a él y no comprender su posición absoluta).
Si se trata de un altavoz de superficie, entonces necesita bajar la antena a una profundidad suficiente, si quiere determinar la ubicación de la víctima con un sonar pasivo o activo, entonces la orientación del sonar, que cuelga de un cable flexible durante varias decenas de metros, también debe ser capaz de seguir con precisión inalcanzable.
Huelga decir que, en principio, la precisión de la ecolocación horizontal no es suficiente para una suplantación adecuada (¡no se convierte en atasco!), O que (¡como la suplantación en sí misma!) ¿Es simplemente notablemente encantadora bajo el agua? Y quizás la única opción es cuando el chupón sabrá exactamente la ubicación de la víctima, cuando estará físicamente con ella, como un pez pegado a un tiburón ballena.
¿Cuál es el resultado más probable, dado lo que escribí sobre el rango de comunicación y todas las condiciones operativas de los nodos y planeadores de la red submarina?
- Si esto está cerca (cientos de metros, unidades de kilómetros), simplemente nadarán hacia el que pone el altavoz en un bote y pedirán una explicación.
- Si esto está lejos (decenas de kilómetros), entonces los clics no autorizados (¡y sin sentido!) Del sonar pueden responder fácilmente a la "frecuencia 533".
Emite activamente bajo el agua: es como conducir de noche en un automóvil con la luz interior encendida, al menos imprudentemente.Ni siquiera digo que la hidroacústica sigue siendo acústica, las señales no requieren un equipo de grabación sofisticado, todo se nota en el espectro, y si está diseñado para largas distancias y bajas frecuencias, es audible.Por lo tanto, resulta que el boxeo, efectivo en el aire - suplantación de GNSS, resulta ser bastante incómodo y sin sentido en un ambiente acuático.Todo lo que realmente funciona contra la acústica: interferencia, interferencia y una vez más interferencia, cuanto más potente, mayores serán las posibilidades. Bueno, o simplemente nada y recógelo con un ottertkoy =)PS
Deliberadamente no proporciono enlaces a publicaciones, quienes estén interesados pueden encontrar fácilmente artículos sobre las palabras "suplantación acústica subacuática".Tradicionalmente, estaré agradecido por las críticas constructivas, mensajes de error, sugerencias y sugerencias.