En 1495, Leonardo da Vinci creó un dibujo de armadura viviente. Y solo después de 425 años, el escritor checo de ciencia ficción Karel Čapek utilizó por primera vez la palabra "robot" en su obra "RUR". Los robots modernos son mucho más inteligentes, más complejos y más móviles que el robot da Vinci, pero tienen características comunes. Uno de ellos es el material del que están hechas estas increíbles máquinas. Cuando hablamos de robots, a menudo imaginamos algo sintético, no sin razón en los libros y las películas de robots que a veces se llaman sintéticos.
Sin embargo, los robots se pueden crear no solo a partir de metal, plástico o fibra de carbono. Científicos de la Universidad de Vermont (EE. UU.) Decidieron utilizar jaulas de ranas como materiales de construcción. Los robots microscópicos resultantes, llamados "xenobots", pueden viajar a través del cuerpo de un organismo vivo y realizar sus tareas. ¿Cómo crearon los científicos la vida artificial, de qué talentos pueden jactarse los xenobots y dónde se puede aplicar una invención tan inusual? Aprendemos sobre esto del informe del grupo de investigación. Vamos
Base de estudio
Crear un mecanismo que realice algunas tareas bajo el control de la inteligencia artificial no es tan difícil hoy en día. No es difícil reconstruir el organismo existente cambiando su estructura, funciones o características. Sin embargo, crear vida desde cero no es una tarea fácil. Investigadores de la Universidad de Vermont dicen que los materiales sintéticos se utilizan en robótica en su mayor parte debido a la simplicidad de su fabricación, implementación e integración. Exagerar diciendo que el metal siempre se puede derretir, volver a formar o afilar. Pero organismos vivos, tejidos y células, es decir Los sistemas vivos demuestran la estabilidad de la estructura y las funciones. Son muy resistentes a las interferencias externas destinadas a cambiar su comportamiento.
Al mismo tiempo, las células vivas, especialmente las embrionarias, demuestran características sorprendentes que incluso los robots sintéticos más desarrollados no pueden presumir. Las células embrionarias son capaces de autoorganizarse, realizando los procesos de desarrollo y regeneración de tejidos, dependiendo de la situación. Las manipulaciones con esta capacidad pueden permitir la creación de una morfología sintética a través de la cual se pueden realizar nuevas formas de vida, sin importar cuán fuerte suene. Además, el proceso de autoorganización celular puede supervisarse, proporcionando así a la estructura futura las funciones y características necesarias.
Por el momento, ya existen varios métodos para desarrollar y crear sistemas de vida individuales. Por ejemplo, los organismos unicelulares pueden modificarse por medio de genomas refactorizados (transformados), pero esto aún no es posible implementarlo en sistemas multicelulares.
También puede modificar la cadena celular cambiando las condiciones de cultivo. Pero en este caso, el control sobre los procesos y sobre la estructura y funciones será mínimo. En contraste, hay desarrollos en el campo de la bioingeniería, donde se estudian los marcos tridimensionales. Esta opción le dará más control. Pero la incapacidad de predecir el comportamiento de una estructura biológica arbitraria limita esta técnica al ensamblaje de máquinas biológicas basadas en las existentes. En otras palabras, será la misma modificación de lo que ya está allí, pero no la creación de un nuevo organismo vivo.
A pesar de todas las dificultades y obstáculos, hay formas. Una de ellas es la búsqueda computacional junto con la impresión tridimensional. A diferencia del aprendizaje automático, la búsqueda es un proceso evolutivo que le permite diseñar la estructura física de una máquina y su comportamiento desde cero. Además, este método no está vinculado a ningún tipo específico de la estructura que se está creando ni a ninguna función específica. Se puede usar el mismo algoritmo evolutivo para desarrollar diferentes sistemas: medicamentos, metamateriales e incluso máquinas autónomas.
En nuestro estudio de hoy, los científicos demostraron un enfoque escalable para el diseño de sistemas vivos utilizando un algoritmo evolutivo.
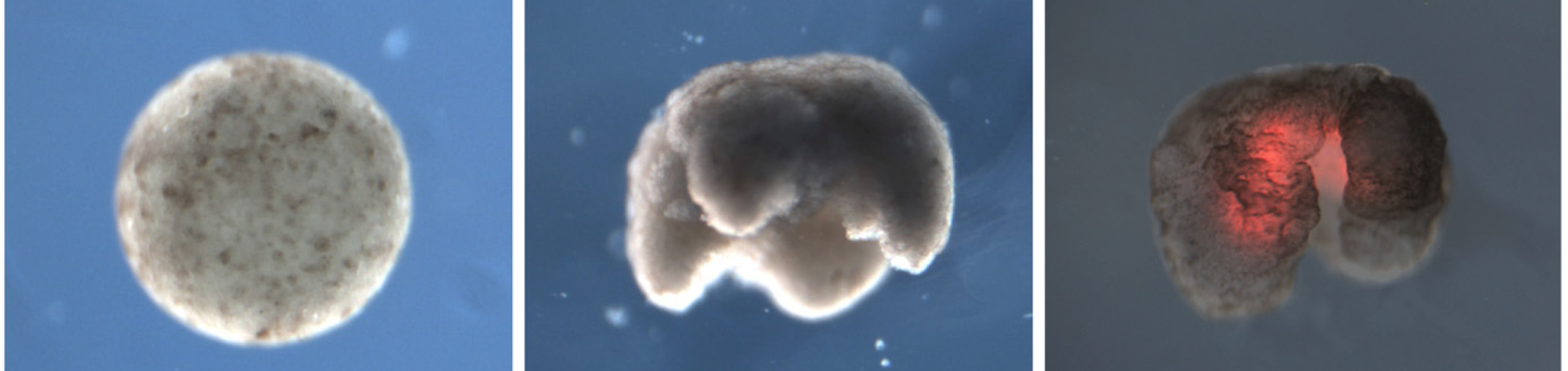
 Imagen No. 1
Imagen No. 1El nuevo método está organizado como un transportador lineal, que toma como entrada la descripción de los bloques de construcción biológicos utilizados y el comportamiento deseado que el sistema fabricado debería demostrar. El transportador muestra continuamente sistemas de vida saludables que implementan el comportamiento especificado de diferentes maneras. Los sistemas vivos resultantes son nuevas colecciones de células que tienen muy poco que ver con los órganos u organismos existentes.
Resultados de la investigación
El transportador está organizado como una secuencia de generadores y filtros. El primer generador es un algoritmo evolutivo que descubre varias formas de combinar bloques de construcción biológicos para realizar el comportamiento deseado. Para empezar, se crea una población de variantes aleatorias de futuros modelos de sistemas. Luego, cada modelo se recrea en un entorno virtual, después del cual se asigna automáticamente una calificación de rendimiento. Los modelos menos productivos se eliminan y se sobrescriben mediante copias modificadas accidentalmente de modelos más productivos. La repetición de este proceso conduce a la formación de poblaciones de patrones diversos y no repetitivos.
Proceso de diseño de video presentación de organismos reconfigurables.Dado que es probable que haya muchas diferencias entre el medio físico simulado y el objetivo, los modelos efectivos se pasan a través de un filtro de estabilidad (confiabilidad) que solo permite pasar aquellos que admiten el comportamiento deseado a pesar del ruido (cambios en el entorno).
Los modelos resistentes al ruido que sobreviven se pasan a través de un filtro de ensamblaje, que elimina los modelos que no son adecuados para el método de ensamblaje actual o que no pueden escalar a tareas más complejas en el futuro. La capacidad de fabricación depende del tamaño mínimo de la concavidad, que se conservará en grupos de células madre en desarrollo, que tienden a cerrar pequeñas brechas en su geometría general. La escalabilidad del modelo depende de su parte de tejido pasivo, que proporciona espacio para futuros sistemas de órganos o cargas útiles (es decir, espacio para contener una sustancia transportable, como un medicamento).
 Xenopus laevis
Xenopus laevisLos modelos que pasan con éxito a través del filtro de ensamblaje se forman a partir de tejido vivo. Las células madre
pluripotentes * se recolectan primero de embriones de
Xenopus laevis (rana espuela lisa) en la etapa de blastula, luego se disocian y combinan para lograr el número deseado de células.
Las células pluripotentes * son capaces de diferenciarse (transformarse) en todos los tipos de células, excepto las células de órganos extra germinales.
Después del período de incubación, el tejido agregado se forma manualmente mediante sustracción utilizando una combinación de pinzas para microcirugía y un electrodo de cauterización con una aguja de 13 μm.
Además, el tejido contráctil se estratifica en el cuerpo al introducir células progenitoras del corazón de la rana, que naturalmente se convierten en cardiomiocitos (músculo cardíaco). Estas células crearán ondas contráctiles en ciertos lugares del organismo creado.
El resultado de todas estas manipulaciones fue una representación tridimensional en vivo del modelo, que tiene la capacidad de moverse de forma independiente a través del entorno acuático durante varios días e incluso semanas sin nutrientes adicionales.
La presentación en video es el proceso de creación de organismos reconfigurables.Los organismos resultantes se introducen posteriormente en el entorno físico real para controlar su comportamiento.
Luego, los científicos compararon las observaciones con los resultados del modelado para identificar el hecho de la transición del comportamiento de "sintéticos" a "orgánicos".
Un aspecto importante de la técnica es la continuación del algoritmo evolutivo incluso después de la introducción de organismos preparados en el medio ambiente. Algunos de ellos, a pesar de su utilidad en la etapa de desarrollo, pueden no mostrar el comportamiento exacto que se esperaba. Dichos modelos de organismos se eliminan del algoritmo, lo que conduce a la creación de la próxima vez organismos más estables y ambientalmente apropiados.
Así, se llevaron a cabo 4 recorridos del transportador. El resultado de esto fue 4 tipos de organismos, demostrando las siguientes características: locomoción, manipulación de objetos, transferencia de objetos y comportamiento colectivo. Ahora hablemos más sobre cada una de las características.
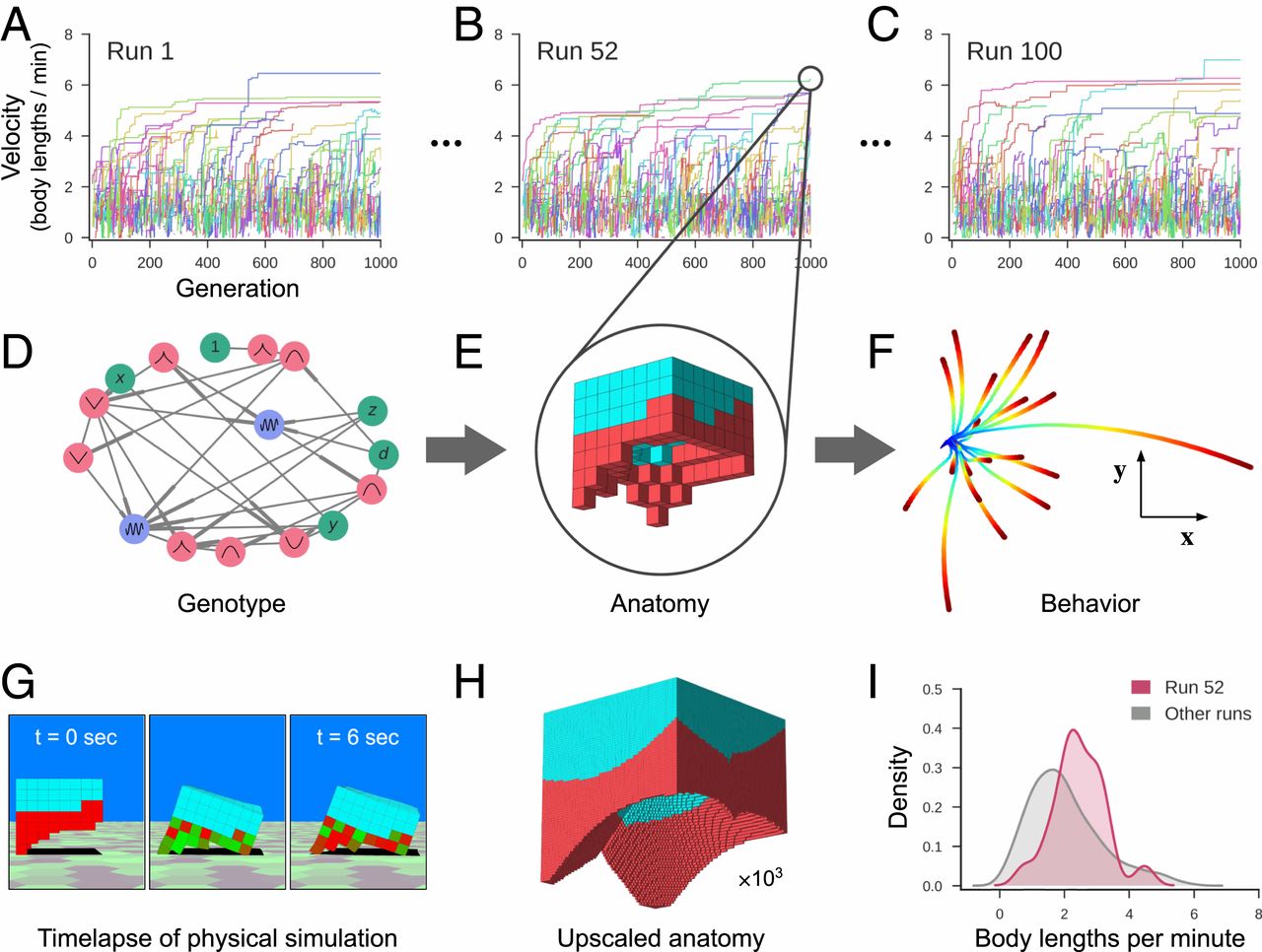 Imagen No. 2
Imagen No. 2Para obtener un conjunto diverso de modelos, se llevaron a cabo 100 pruebas independientes del algoritmo evolutivo (
2A -
2C ), cada una de las cuales comenzó con un conjunto diferente de modelos aleatorios iniciales. Durante cada prueba, los modelos se seleccionaron en función del desplazamiento neto (desplazamiento) logrado durante un período de 10 segundos (con una contracción aleatoria, modulada en fase, cíclica a 2 Hz). En el curso de cada prueba, se aplicaron parámetros de selección adicionales en forma de competencia estimulante dentro y entre líneas genéticas únicas, lo que condujo a la formación de dinámicas ambientales únicas. Al final de cada prueba, se retiraron los modelos más adecuados (
1A ) y se pasaron a través de filtros y conjuntos de estabilidad. En el proceso de este filtrado, se seleccionaron aquellos modelos que retuvieron la locomoción rápida durante el escalado y la construcción (imagen No. 3).
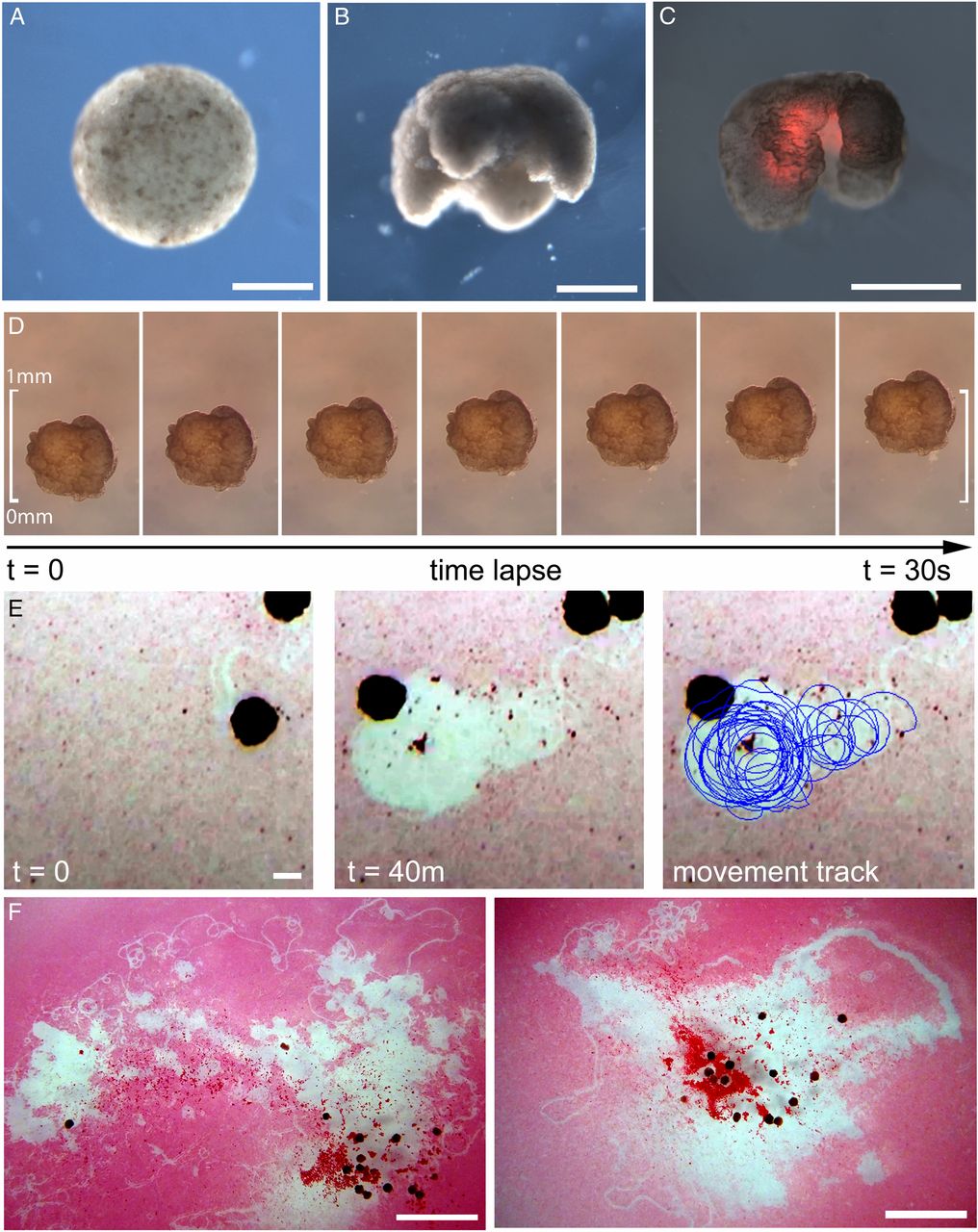 Imagen No. 3
Imagen No. 3Vale la pena señalar que los cilios (cilios, pelos finos en la superficie celular) no se modelaron durante el proceso de diseño y se suprimieron durante las pruebas prácticas por microinyección embrionaria de ARNm que transcribe el dominio intracelular de Notch. Por lo tanto, todos los movimientos de los organismos se llevaron a cabo exclusivamente a través de la reducción del tejido muscular cardíaco.
Las trayectorias de organismos decilados simulados y realizados (sin cilios) se compararon en dos orientaciones: vertical e invertida, es decir. invertido 180 ° con respecto al plano transversal. Las observaciones mostraron que al menos una de las variantes de los modelos del cuerpo realizó con éxito el comportamiento dado en una orientación vertical, pero no en una invertida (imagen No. 4).
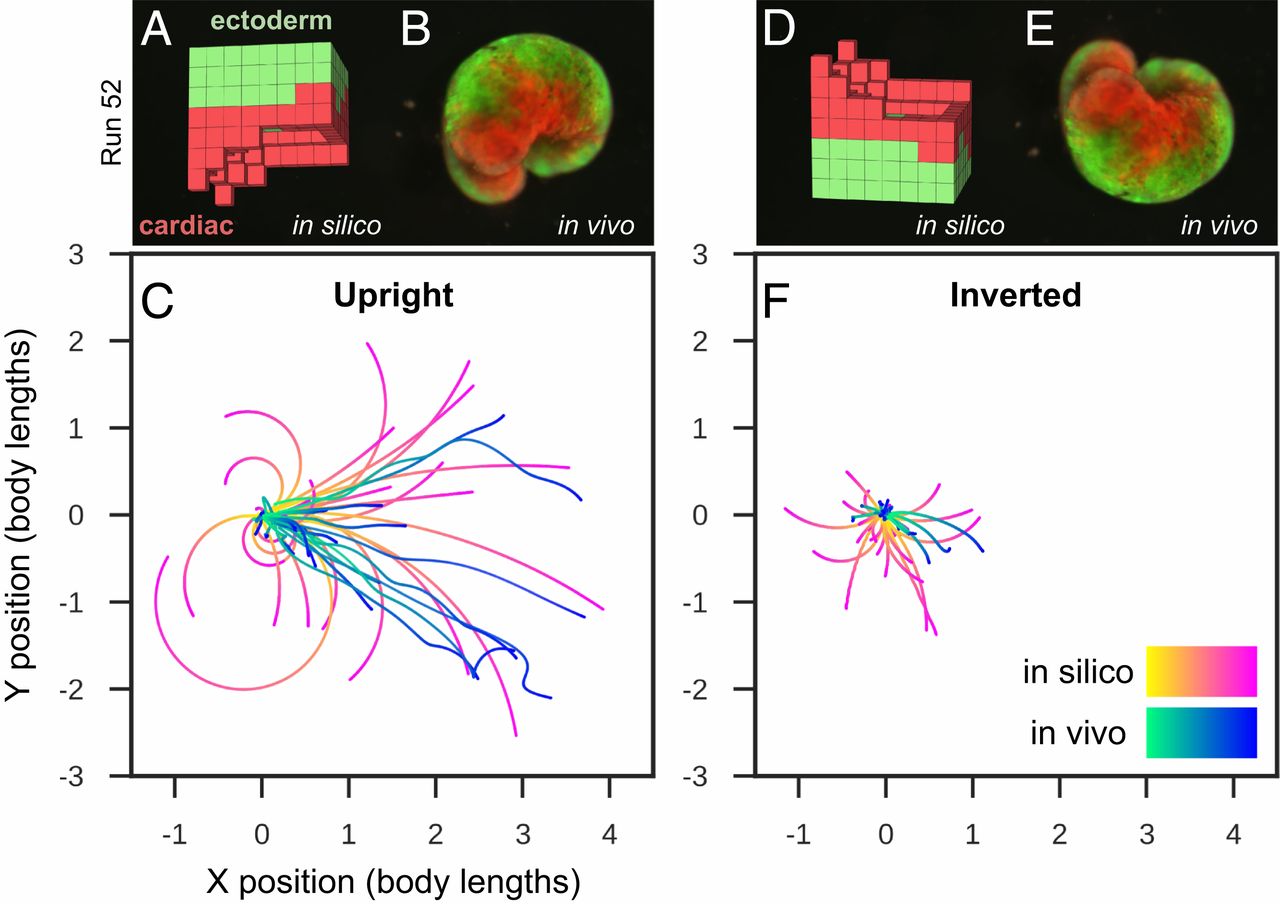 Imagen No. 4
Imagen No. 4La dirección del movimiento de los organismos con una orientación vertical coincidió con la dirección del modelo bajo perturbaciones aleatorias. Esto sugiere que el movimiento exitoso en el espacio no es aleatorio, sino que es el resultado del diseño del modelo del organismo mismo.
La segunda característica es la manipulación de objetos. Cuando había partículas sólidas en el entorno de los organismos de prueba, los primeros comenzaron a combinarse espontáneamente con ellos, tanto en el modelado como en la práctica (
3F ).
Este comportamiento difícilmente se puede llamar estructurado, ya que no se establecieron los parámetros de tarea necesarios. Esto se puede lograr con mayor precisión agregando datos más precisos: por ejemplo, indique el área que necesita limpiarse de partículas o indique un tipo específico de partículas que deben eliminarse, mientras ignora todas las demás. El segundo comportamiento fue implementado, pero hasta ahora en un nivel primitivo.
En la siguiente etapa, se probaron organismos que mostraban la capacidad de transportar objetos. Algunos de los organismos han sido diseñados para reducir la resistencia hidrodinámica a través de un agujero en el centro de su plano transversal. Sin embargo, no había tejidos contráctiles en esta área del cuerpo.
Este agujero durante los ciclos posteriores del algoritmo evolutivo puede transformarse en una especie de bolsa para transferir objetos, que puede usarse para la entrega localizada de medicamentos.
Otra característica es el comportamiento colectivo. Durante la implementación práctica, se observó una colisión de dos organismos, lo que condujo a la formación de una conexión mecánica temporal. Estos dos organismos comienzan a girar uno alrededor del otro, y después de algunas revoluciones se separan nuevamente a lo largo de las trayectorias tangenciales. Tal comportamiento será mucho más pronunciado si no suprime el desarrollo de los cilios, ya que conducen al "enredo" de los dos organismos entre sí, es decir. su conexión se hace mucho más larga.
Para conocer más detalladamente los matices del estudio, le recomiendo que examine el
informe de los científicos y los
materiales adicionales .
Epílogo
Este estudio no es difícil de llamar único, dados sus resultados. Los científicos tomaron células de rana y crearon a partir de ellas nuevos organismos multicelulares que realizan funciones específicas en diversos grados de éxito. Incluso los autores de este trabajo entienden que muchos están asustados por la perspectiva de robots autónomos, algo pensantes, y mucho menos nuevas formas de vida. Sin embargo, en su opinión, este estudio permite una mejor comprensión de la vida misma como un fenómeno. Además, los xenobots desarrollados pueden servir en medicina, convirtiéndose en nanocirujanos vivos, eliminando células dañinas y patógenas del cuerpo del paciente, o nano-mensajeros de medicamentos, llevándolos directamente a donde lucharán más eficazmente contra la enfermedad.
La vida en todas sus formas y manifestaciones es impecable, a pesar de todas las deficiencias. Cada criatura viviente ha evolucionado para adaptarse a las condiciones de vida cambiantes. La ciencia moderna es capaz de crear vida, pero solo dentro del marco de cambio de organismos existentes. Pero crear algo nuevo desde cero es una tarea completamente diferente, más difícil, más ambiciosa. Hay ejemplos de organismos creados artificialmente, pero no se pueden comparar con los descritos por los escritores de ciencia ficción. A pesar de esto, los científicos de todo el mundo no detienen su investigación, con la esperanza de crear una nueva forma de vida. Todavía es difícil decir cuán peligroso es jugar con la naturaleza. Sin embargo, según los escritores de ciencia ficción, tales descubrimientos no serán buenos. Sin embargo, las obras de literatura de ciencia ficción, aunque en muchos aspectos predicen el futuro de la sociedad en general y de la ciencia en particular, son solo producto de la imaginación del autor. Cómo se utilizarán exactamente las tecnologías que se están desarrollando actualmente, incluidos los xenobots, depende únicamente de nosotros mismos.
Gracias por su atención, tengan curiosidad y tengan un gran fin de semana a todos, muchachos. :)
Un poco de publicidad :)
Gracias por quedarte con nosotros. ¿Te gustan nuestros artículos? ¿Quieres ver más materiales interesantes? Apóyenos haciendo un pedido o recomendando a sus amigos
VPS basado en la nube para desarrolladores desde $ 4.99 , un
análogo único de servidores de nivel básico que inventamos para usted: toda la verdad sobre VPS (KVM) E5-2697 v3 (6 núcleos) 10GB DDR4 480GB SSD 1Gbps desde $ 19 o cómo dividir el servidor? (las opciones están disponibles con RAID1 y RAID10, hasta 24 núcleos y hasta 40GB DDR4).
Dell R730xd 2 veces más barato en el centro de datos Equinix Tier IV en Amsterdam? ¡Solo tenemos
2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV desde $ 199 en los Países Bajos! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - ¡desde $ 99! Lea sobre
Cómo construir un edificio de infraestructura. clase utilizando servidores Dell R730xd E5-2650 v4 que cuestan 9,000 euros por un centavo?