Antecedentes
El caluroso verano estaba terminando, detrás había unas maravillosas vacaciones familiares en el cálido y apacible mar, y los contornos de los días de trabajo grises ya eran visibles por delante. Para no sucumbir a la depresión del otoño, era urgente hacer algo agradable y útil, y esto no tardó mucho: el hijo mayor tuvo que preparar el trabajo para la conferencia escolar. El tema del trabajo ya ha estado suspendido en el aire durante mucho tiempo. Sigo con gran interés las publicaciones del autor de Neoprog "Desarrollo de hexapod desde cero". Y fueron sus artículos los que nos inspiraron a trabajar en esta dirección.
Construcción
Como elementos estructurales de conducción, elegimos los servos MG-996R. De las características reivindicadas, tienen características bastante altas y de potencia a un costo relativamente bajo. Las dimensiones y el diseño de este servoaccionamiento formaron la base para la construcción posterior del robot, que originalmente planeamos hacer de plástico con impresión 3D.
El primer paso fue hacer y probar un prototipo funcional de una sola extremidad.

Al no tener experiencia en programas de modelado 3D, decidimos frívolamente traducir nuestros bocetos en papel a un modelo tridimensional utilizando el editor de constructor 3D integrado en Windows 10. Para toda su simplicidad, este editor tiene un arsenal bastante extenso y le permite crear modelos 3D bastante complejos.
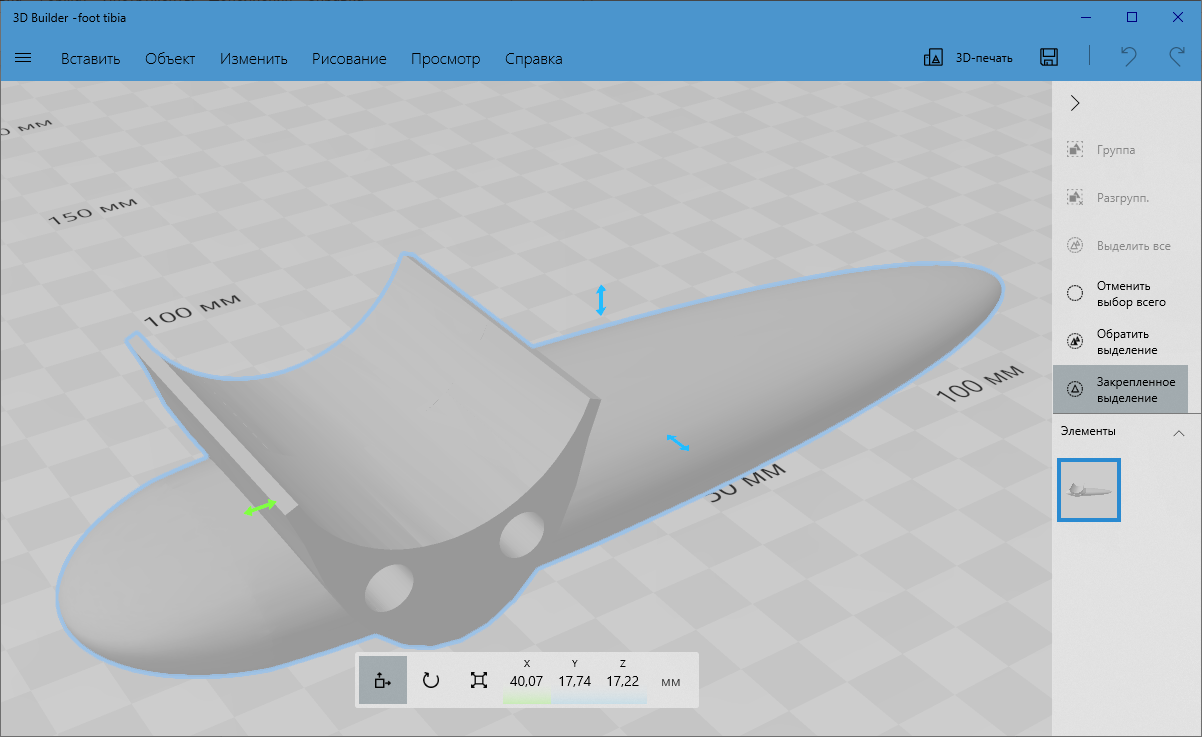
Pero la simplicidad de trabajar en este editor también es su punto débil. La falta de control sobre la cantidad de vértices en el modelo lleva al hecho de que después de la trituración y el pegado repetidos, el modelo de apariencia simple comienza a tener un
gran mundo interior con la cantidad de polígonos y el editor comienza a realizar algún tipo de recálculo interno del modelo, lo que le permite solo contemplar su creación sin la capacidad de editar algo.
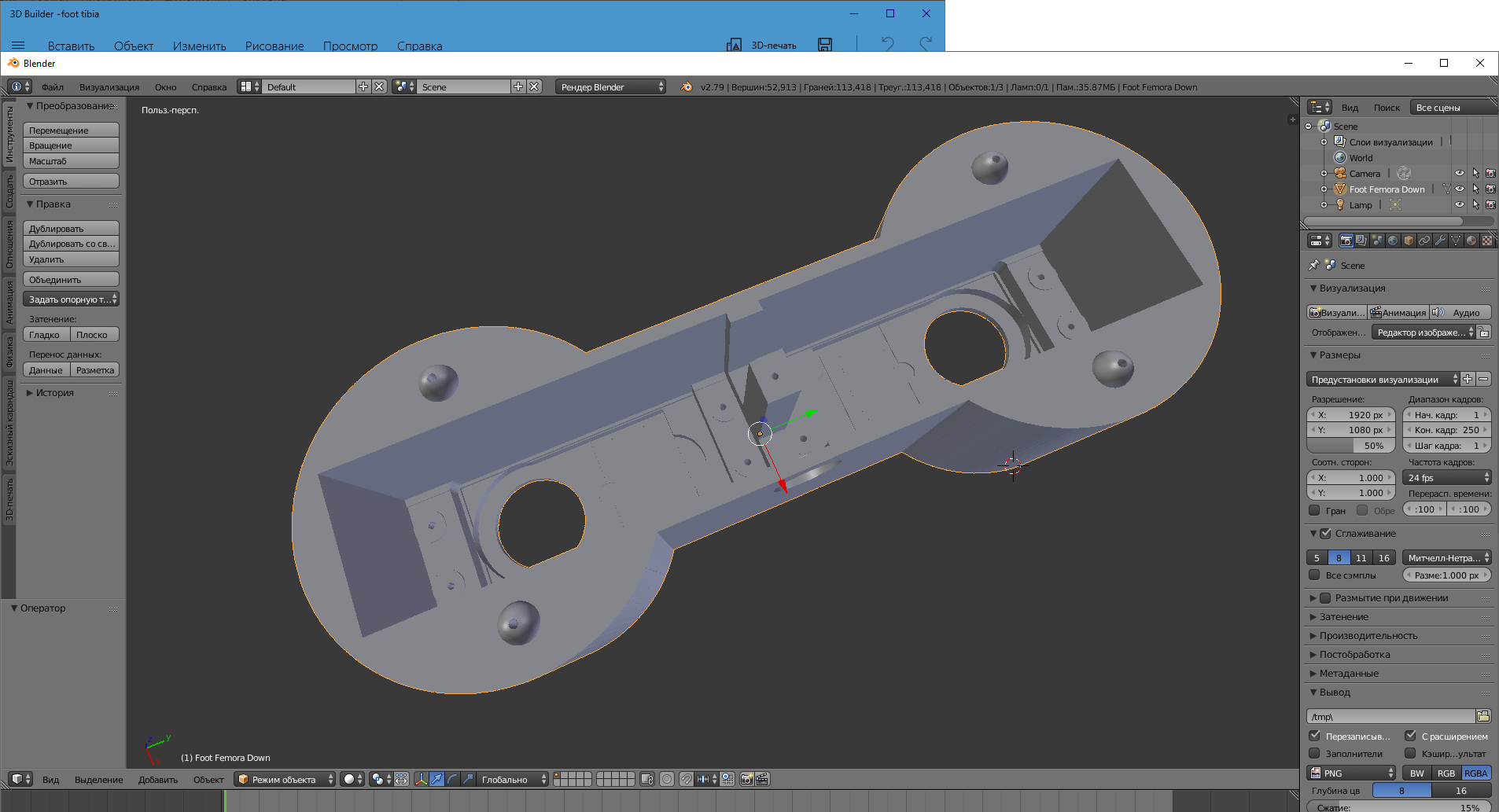
Después de un análisis rápido de los editores disponibles, era costumbre usar Blender debido a su
incomprensibilidad gratuita y al hecho de que me comprometí a estudiarlo varias veces y todos los intentos terminaron en fracaso. Esta vez, la presencia de un objetivo específico ha dado sus frutos. La habilidad mínima pero suficiente en el editor fue moderada y continuamos el desarrollo. Me gustaría señalar que en el futuro no nos negamos por completo a trabajar en un constructor 3D. Todavía es mucho más conveniente llevar a cabo algunas acciones de acabado con el modelo en él: hacer agujeros para los tornillos, cortar cavidades internas de forma compleja y mucho más.
Al diseñar las extremidades, establecemos la tarea de ocultar los servos dentro del gabinete al máximo. En general, esto era posible, pero de todos modos, los bucles tuvieron que dejarse afuera para reducir el impacto mecánico cuando las juntas estaban dobladas. Con el diseño le permite mantener la libertad de movimiento de las articulaciones en casi el rango máximo de 0-180 grados. Para reducir la fricción y el desgaste, se proporciona un rodamiento en cada junta.

Para imprimir, utilizamos la Impresora 3D Infintary, que fue comprada en el "cielo" hace un par de años. El proceso es bastante lento, por lo que tomó más de un día imprimir todo el conjunto de extremidades.

Durante este tiempo, hicimos un boceto y construimos un modelo 3D del marco al que se deben unir las extremidades. También alberga servos de las articulaciones del hombro.

Impresión y montaje
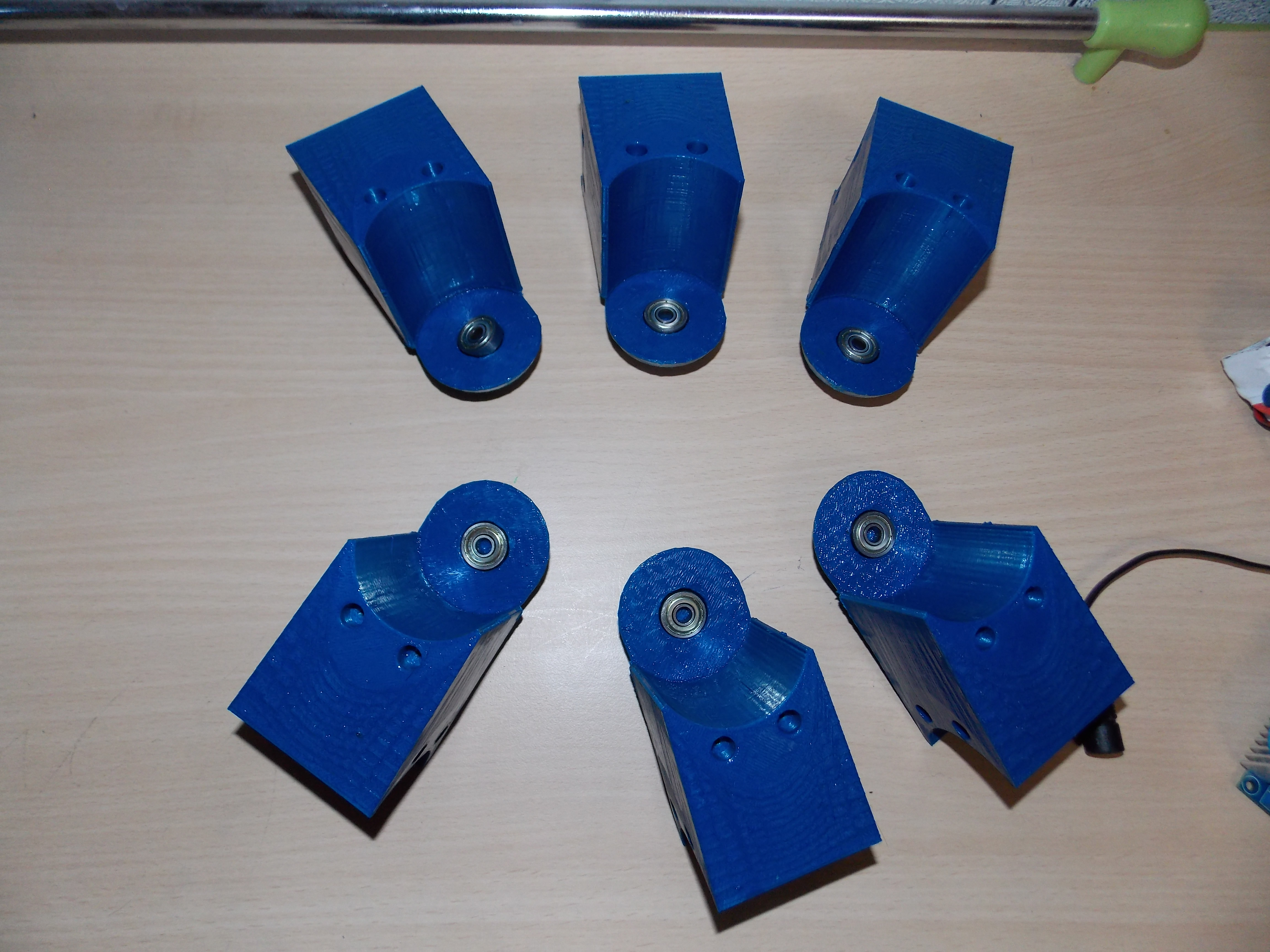
Una vez completada la impresión, comenzamos a ensamblar las extremidades y el ensamblaje final. En una versión desmontada, resultó una especie de constructor:
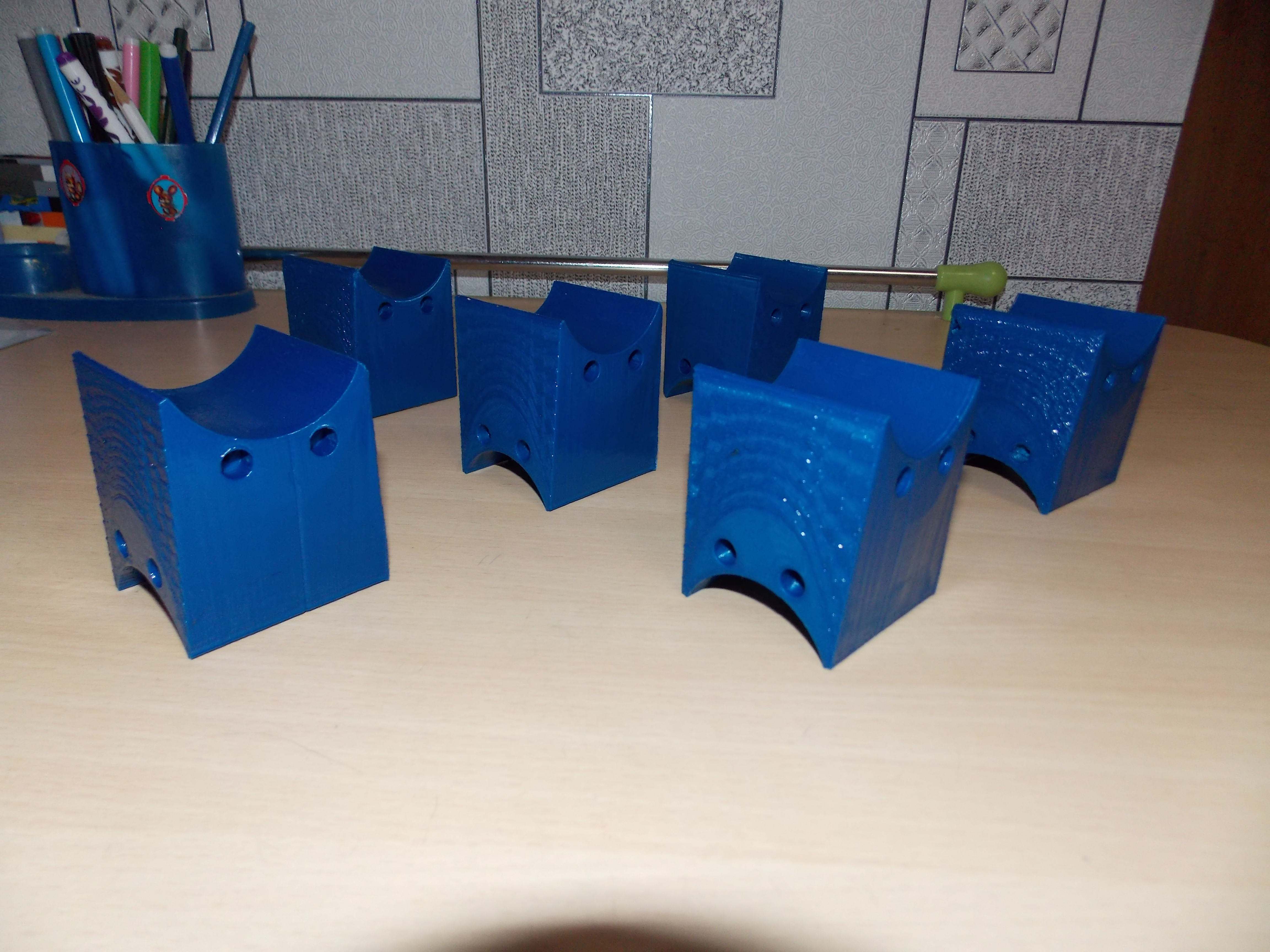



Al ensamblar, lo principal es no olvidar insertar los rodamientos y la tracción de los servos.

Un punto importante: en el momento del ensamblaje, todos los servos deben llevarse a la posición intermedia. Para calibrar la posición de las articulaciones de los hombros, imprimimos y subvencionamos una plantilla especial.


Como resultado, obtuvimos una plataforma de seis patas bastante agradable, cuya revitalización fue ocupada por todo nuestro tiempo libre.

Llenado electrónico
En este momento, el conjunto principal de llenado electrónico para revitalizar el robot estaba compilado y dotado de personal. Incluye componentes confeccionados, a saber:
- Controlador principal Arduino UNO + WiFi R3 ATmega328P + ESP8266
- Estabilizadores ajustables DC / DC Max 9A 300 W - 6 uds.
- Baterías de alta corriente HG2 18650 3000 mAh - 3 piezas
- Controlador de carga BMS 3S 11.1 V 12.6 V 40A
- Escudo multiservo con 18 servos accionados por bus I2C.
El uso de componentes listos para usar afectó negativamente el tamaño del robot. Tuvimos que construir un segundo nivel por encima del marco principal, en el que colocamos estabilizadores y un servo escudo.

La placa Arduino y el sistema eléctrico
instalados en el techo se encuentran en el tercer nivel del edificio. Planeamos agregar aquí un par de pantallas oled que simulan ojos, un micrófono, una cámara y un sensor de distancia.

Actualmente, la mayoría del trabajo planificado lo hemos completado. Se crea "Hexa" (como lo llamamos con el hijo de nuestro robot) y se puede controlar a través de dispositivos Telnet o Android a través de una aplicación especialmente escrita.
Epílogo
El patio ya es invierno profundo, los días se vuelven más largos y brillantes. Esto significa que la primavera y el buen humor están a la vuelta de la esquina. Me alegraría si mi primera publicación, y espero que no la última, fuera interesante o útil para alguien. El tema del artículo se centró solo en la descripción del proceso de creación, por lo que el llenado del software y todo lo demás se mantuvo detrás de escena. Si está interesado, puede dedicar los siguientes artículos a este tema. Listo para responder todas las preguntas.
Gracias por su atencion!
Modelo 3D para descargar