ध्यान दें, लेख पुराना है, लेकिन इसे अभी भी शैक्षिक उद्देश्यों के लिए उपयोग किया जा सकता है
एक
कॉप्टर के सरल निर्माण (
यहां मेरा अनुवाद है ) के बारे में
rxxplorer के साथ एक
लेख से प्रेरित होकर, मैंने खुद को 3 मोटर्स के साथ एक छोटी उड़ान इकाई बनाया, लेकिन लकड़ी के बजाय विभिन्न दिमाग और बीम के एल्यूमीनियम आधार के साथ।
मैं कुछ चीजों के बारे में चुप रहूंगा, क्योंकि उन्हें
पिछले लेख में विस्तार से वर्णित किया
गया है।
ढांचा
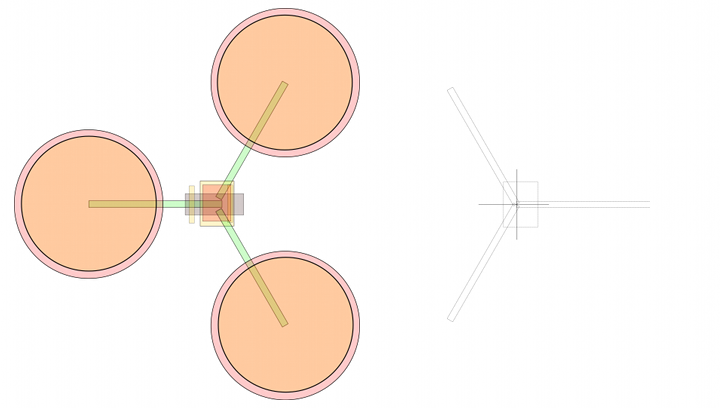
फ्रेम बहुत सरल है। हम फाइबर ग्लास या अन्य समान पतली और टिकाऊ सामग्री का एक टुकड़ा लेते हैं, वांछित आकार के मध्य भाग के दो हिस्सों को काटते हैं और दो तरफा टेप के साथ परिणामी भागों को बन्धन करते हैं, बीम संलग्न करने के लिए उन में 6 छेद ड्रिल करते हैं: प्रत्येक बीम पर 2 छेद, और 120 डिग्री के कोण पर प्रत्येक बीम। इस मामले में, मोटर की धुरी से किरणों के कनेक्शन के केंद्र तक की दूरी की पूर्व-गणना करने की सलाह दी जाती है, अन्यथा फ्लाइट कंट्रोलर के भविष्य के कॉन्फ़िगरेशन के साथ समस्याएं हो सकती हैं।
यदि आपको पता नहीं है कि शीसे रेशा कहां पाया जाए, तो आप हमेशा taydaelectronics.com पर
ऑर्डर कर सकते हैं, 6 इंच के 6 में से एक की कीमत $ 1 से थोड़ी अधिक है, लेकिन आपको पैकेज के न्यूनतम वजन में फिट होने के लिए कम से कम 5 टुकड़े खरीदने की आवश्यकता है।

अब हमें एक हल्के और टिकाऊ एल्यूमीनियम प्रोफ़ाइल की आवश्यकता है। चूंकि मैं खरीदारी करने के लिए आलसी था, और समय समाप्त हो रहा था, मैंने गुडलक वेबसाइट से प्रत्येक
के लिए 4 किरणों का एक सेट , 25 सेमी लंबा
सेट करने का आदेश दिया ।
मैं आमतौर पर इंकस्केप में स्थान और आयामों का पता लगाता हूं, फिर वर्कपीस की रूपरेखा, प्रिंट और स्टिक को छोड़ता हूं।
निर्माण के समय, मेरे पास फ़ॉइल फ़ाइबरग्लास का केवल एक छोटा सा टुकड़ा था, इसलिए मुझे दो आयतें मिलीं, जिनमें 65 की माप 85 मिमी थी। जिसमें बाद में एक बैटरी और एक कैमरा के साथ निलंबन बढ़ते के लिए 4 और छेद बनाए गए थे।

नतीजतन, हमें एक ऐसा फ्रेम मिला, जिसे
प्लास्टिक बोल्ट और नट्स के साथ बांधा गया, जो, इसके अलावा, बुरी तरह से नहीं मुड़ता है (यह बाद में इतना सुंदर नहीं होगा, लेकिन अभी भी कॉम्पैक्ट है)
कुंडा तंत्र
ट्रिकॉप्टर का सबसे कठिन और समस्याग्रस्त स्थान रियर मोटर का रोटरी तंत्र है, जो रोटेशन की क्षतिपूर्ति करने के लिए कार्य करता है, साथ ही साथ घूमने के लिए भी। सिर्फ इसलिए कि लंबे समय से उसके लिए "तीन रूबल" बनाने में हिचकिचाहट थी, लेकिन वास्तव में अर्थव्यवस्था और परिवहन के लिए फ्रेम को आसानी से मोड़ने की क्षमता को देखते हुए चाहिए था। डेविड के लेख के अनुसार, मैंने
इन चीजों को लिया:

लेकिन सर्वो के साथ एक त्रुटि थी (मैं थोड़ा बचाना चाहता था, लेकिन मुझे इसे दो बार खरीदना पड़ा), इसलिए तंत्र का पहला संस्करण काफी बड़ा और भारी निकला।

इसलिए, मैं तुरंत
डेविड बीएमएस -385DMAX लेने की सलाह देता हूं,
डेविड द्वारा लेख में दिखाया
गया है ।
ध्यान दें कि कुंडा तंत्र पकड़े हुए पेंच बंद नहीं होता है, आपको प्रोफ़ाइल को थोड़ा मोड़ना चाहिए। मैं तंत्र के सफेद ब्लॉक के अवकाश में लकड़ी के एक छोटे से टुकड़े को पेंच करने के साथ-साथ 2-पक्षीय टेप या गोंद का उपयोग करने की भी सलाह देता हूं।

गति नियंत्रक, मोटर्स और प्रोपेलर
परंपरा के अनुसार (और यह घर पर उपलब्ध था)
हॉबीकिंग ब्लूज़री 30 ए स्पीड
कंट्रोलर और
20-22 एल मोटर्स। स्पीड
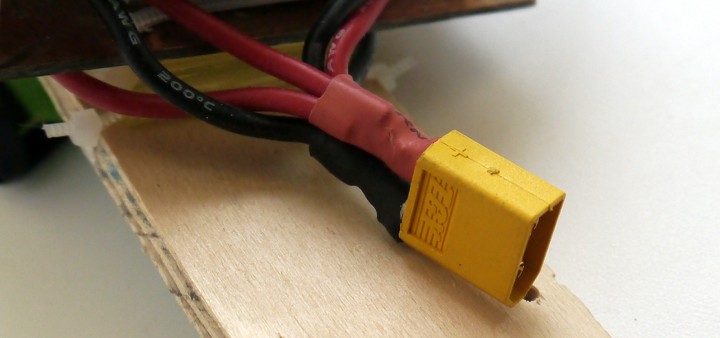
कनेक्टर को
पावर कनेक्टर को आसानी से खींचने के लिए और यहां तक कि
बैटरी तक पहुंचने के लिए बिजली के तारों को लंबा करना पड़ा। और निश्चित रूप से, आपको गति नियंत्रकों की सेटिंग्स को थोड़ा बदलने की जरूरत है, ब्रेक चालू करें, टाइमिंग को बढ़ाएं और चिकनी त्वरण को हटा दें (गति नियंत्रकों के अलग-अलग मापदंडों के अलग-अलग पैरामीटर हैं, लेकिन सामान्य तौर पर, सब कुछ सेट करें ताकि यह तेज़ हो)।
मोटरों के घूर्णन के अनुसार,
प्रोपेलर बहुआयामी होते हैं : सामने की बाईं ओर दक्षिणावर्त घूमती है, सामने की दाईं ओर वामावर्त, और पीछे, आपकी सेटिंग्स के आधार पर (याद रखें कि रोटेशन की दिशा बदलने के लिए यह गति नियंत्रक से किसी भी 2 तारों को मोटर से कुछ स्थानों पर स्वैप करने के लिए पर्याप्त है)।
जिम्बल, बैटरी और रैक
इस मामले में जिम्बल बैटरी की चौड़ाई को फिट करने के लिए सिर्फ प्लाईवुड कट है।
वेल्क्रो को प्लाईवुड (बैटरी पर दूसरा हिस्सा)
से चिपकाया जाता है और एक ही समय में विश्वसनीय बैटरी बन्धन के लिए
अतिरिक्त वेल्क्रो को पिरोया
जाता है ।
 सिलिकॉन ट्यूब
सिलिकॉन ट्यूब को स्क्रू के माध्यम से निलंबन से जोड़ा जाता है, अन्य सिलिकॉन ट्यूबों को फ्रेम पर फ्रेम से जोड़ा जाता है, और फिर कैमरे पर कंपन को नम करने के लिए एक साथ बांधा जाता है।

ताकि खपरैल बैटरी पर न उतरे (जो कि बेहद खतरनाक है), पीसीबी के अवशेषों से 3 छोटी आयतों को काटा जा सकता है और, उनमें छेद करने के बाद, उन्हें बीम के साथ तय किया जाता है।
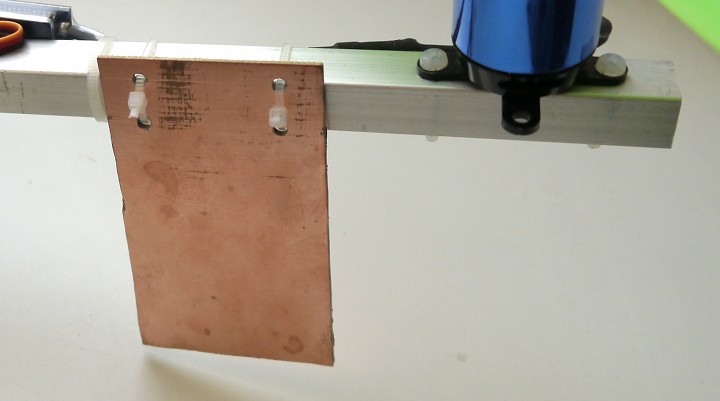
अपेक्षाकृत कठिन लैंडिंग के साथ, शिकंजा गिर जाता है, जो गिरावट की अधिकांश ऊर्जा को अवशोषित करता है, इसलिए बैटरी को नुकसान नहीं होता है (डामर पर 7 मीटर से गिरने पर परीक्षण किया जाता है)।
क्रिएस लाइट फ्लाइट कंट्रोलर
इतना समय पहले नहीं, atmega328p और सेंसर के एक सेट के साथ एक बहुत ही सस्ते उड़ान नियंत्रक गुडलकबाय वेबसाइट पर दिखाई दिया:
लाइट संस्करण के लिए एक जाइरोस्कोप + एक्सेलेरोमीटर और अतिरिक्त बैरोमीटर और
स्टैंडआर्ट संस्करण के लिए कम्पास। मैंने लाइट संस्करण को दो कारणों से लिया: कीमत (खरीद के समय, अंतर 2 गुना था) और अन्य सेंसर की संवेदनाहीनता (पाठ्यक्रम पूरी तरह से कम्पास के बिना होता है, और bmp0 सेंसर पर जंप +2 मीटर के साथ ऊंचाई रखने से मुझे प्रेरणा नहीं मिलती है)।
खरीद के बाद, मैं सभी अतिरिक्त को बाहर निकालने और शराब में रूमाल को कुल्ला करने की सलाह देता हूं, क्योंकि लगभग सभी चीनी ने बहुत सारे प्रवाहकीय गंदगी को छोड़ दिया है जो संपर्कों को बंद कर देता है और बस नियंत्रक को मार सकता है।

हम फ्रेम और
चिपकने वाले टेप का उपयोग करके फ्रेम से बोर्ड और संबंधित उपकरण (रिसीवर) को ठीक करते हैं। बहुत दृढ़ता से पकड़ता है, और एक ही समय में कंपन को थोड़ा खत्म कर देता है। (केवल ऐन्टेना को माउंट न करें यदि आप बहुत दूर उड़ने का इरादा रखते हैं)।
कॉप्टर का वजन लगभग 800 ग्राम है, एक 2.2Ah बैटरी और 200 ग्राम तक के कैमरे के साथ उड़ान का समय लगभग 10 मिनट है, जबकि पावर रिजर्व अभी भी लगभग 40-50% है।
यह लोहे के हिस्से को समाप्त करता है और सॉफ्टवेयर के साथ खेल शुरू करता है।
सॉफ्टवेयर
बोर्ड के पहले कनेक्शन के बाद, यह पता चला कि अपलोड किया गया फर्मवेयर काफी पुराना है, और यहां तक कि सेंसर कुल्हाड़ियों के साथ मिलाया जाता है, अर्थात। यहां तक कि आपको इस तरह की उड़ान भरने की कोशिश भी नहीं करनी होगी। इसलिए,
Arduino IDE और
नया फर्मवेयर डाउनलोड करें (देव डाउनलोड न करें!),
या इससे भी बेहतर,
मेहोविक से सुधार का एक गुच्छा के साथ
पोर्ट ।
समायोजन
Arduino IDE के माध्यम से स्केच फर्मवेयर खोलें। पूरे कॉन्फ़िगरेशन को config.h फ़ाइल में वर्णित किया गया है (अधिकांश मापदंडों और सेटिंग्स के बारे में अधिक विवरण
यहां पाया जा सकता
है , इस लेख में कई छोटी चीजें छोड़ दी गई हैं)। ट्रिकॉप्टर के लिए, फ्रेम प्रकार #define TRI, सेंसर बोर्ड प्रकार #define CRIUS_LITE और gyroscope #define ITG3200_LPF_42HZ के लिए फ़िल्टर सेट करें। और अब Arduino IDE सेटिंग्स में, किसी भी 328p arduino को चुनें और परिणामस्वरूप स्केच भरें।
अपने सिस्टम के लिए MultiWiiConf लॉन्च करें।

चूंकि हमारा रोटरी तंत्र एक सर्वो का उपयोग करता है जिसमें भारी भार के तहत जलने की क्षमता होती है, इसलिए यह पता लगाना और सर्वो विचलन की सीमा निर्धारित करना बेहतर होता है। ऐसा करने के लिए, कंट्रोल पैनल पर YAW स्टिक के साथ, सर्वो को बाएं और दाएं घुमाएं और अपने चरम पदों पर सर्वो के अधिकतम और न्यूनतम मूल्यों को याद रखें, फिर इन मानों को config.h फ़ाइल में दर्ज करें
#define TRI_YAW_CONSTRAINT_MIN 1340 #define TRI_YAW_CONSTRAINT_MAX 1855
और नियंत्रक में स्केच को फिर से लोड करें। अब आप उतारने की कोशिश कर सकते हैं, लेकिन ध्यान दें कि कोप्टर घूम जाएगा, इसलिए रिमोट कंट्रोल पर YAW चैनल को ट्रिम करें ताकि टेकऑफ़ और फ़्लाइट के दौरान कोई घुमाव न हो, और फिर मल्टीविऑनफ़ोन पर वापस जाएं, इस मान को सर्वो क्षेत्र में देखें और इसे बदल दें
#define TRI_YAW_MIDDLE 1630
चेतावनी! नए फर्मवेयर (2.0 और उच्चतर) में, ऐसी ट्रिमिंग एलसीडी स्क्रीन या टर्मिनल के माध्यम से की जाती है, यदि आपके पास एक भी नहीं है, तो आपको आउटपुट.ino में कोड को थोड़ा बदलना होगा
#ifdef TRI motor[0] = PIDMIX( 0,+4/3, 0);
मेरे tricopter
nekaka.com/d/sgNj8AXp2Y के लिए एक तैयार की गई कॉन्फ़िगरेशन फ़ाइल - शायद कोई काम आएगा।
अब आप
PID को
कॉन्फ़िगर कर सकते हैं,
कैमरा जिम्बल कंट्रोल आदि जोड़ सकते हैं
। , साथ ही स्थिति को पकड़ने और घर लौटने के लिए फ़ंक्शन के साथ
जीपीएस समर्थन जोड़ें ।
निष्कर्ष
वास्तव में, जब निर्माण और स्थापना होती है, तो बहुत अधिक असंगत और दिलचस्प होगा। लेकिन विमान मॉडलिंग में संलग्न होना नशे की लत है, और कॉपर्स में उलझना नशे की लत है, खासकर यदि आप एक प्रोग्रामर हैं और खुले स्रोत परियोजनाओं में से एक के कोड में सुधार करने की इच्छा रखते हैं।
और निष्कर्ष में, हाल ही में उड़ान का एक वीडियो, जिसके दौरान कॉप्टर बुरी तरह क्षतिग्रस्त हो गया था, लेकिन जल्दी से वहीं मैदान में मरम्मत की गई (कप्लर्स और प्लास्टिक बोल्ट के लिए धन्यवाद)।
शूटिंग 2 उपकरणों से की गई थी: एक GoPro कैमरा के साथ एक क्वाड्रोकॉप्टर और एक जहाज पर FPV कैमरा के साथ मेरा ट्राइकॉप्टर, जिसकी एक तस्वीर एक पुराने मिनी डीवीडी कैमरे पर जमीन पर रिकॉर्ड की गई थी।
ps: यदि आपके कोई प्रश्न हैं - पूछें, मैं लेख को यथासंभव अपडेट करूंगा।