
मानव आंख के विपरीत, एक कंप्यूटर फोकस में पूरे दृश्य को प्रस्तुत करता है। पुतली या लेंस के छिद्र के परिमित व्यास के कारण कैमरा और आँख दोनों की सीमित गहराई है। अधिक फोटोरिअलिज़्म प्राप्त करने के लिए, कंप्यूटर पर प्राप्त छवियों में क्षेत्र की गहराई के प्रभाव का उपयोग करने की सिफारिश की जाती है। इसके अलावा, क्षेत्र की गहराई को नियंत्रित करने से लेखक की कलात्मक मंशा को उजागर करने में मदद मिलती है, एक ऐसी वस्तु को उजागर करना जो अर्थ में महत्वपूर्ण है।
अब तक, कंप्यूटर ग्राफिक्स में क्षेत्र की यथार्थवादी गहराई प्रदर्शित करने का कार्य पूरी तरह से हल नहीं हुआ है। विभिन्न मामलों में लागू होने वाले पेशेवरों और विपक्षों के साथ कई समाधान हैं। हम इस समय सबसे लोकप्रिय पर विचार करेंगे।
प्रकाशिकी में
लेंस में प्रकाश का अपवर्तन एक सहज तत्व पर एक छवि बनाता है: फिल्म, मैट्रिक्स, रेटिना। कक्ष में प्रवेश करने के लिए पर्याप्त मात्रा में प्रकाश के लिए, इनपुट एपर्चर (ऑप्टिकल सिस्टम के प्रवेश द्वार पर प्रकाश किरण का व्यास) पर्याप्त आकार का होना चाहिए। अंतरिक्ष में एक बिंदु से किरणें हमेशा लेंस के पीछे एक बिंदु में परिवर्तित होती हैं, लेकिन यह बिंदु आवश्यक रूप से चयनित पिक्चर प्लेन (सेंसर फ्लैटनेस) के साथ मेल नहीं खाता है। इसलिए, छवियों में क्षेत्र की एक सीमित गहराई होती है - अर्थात, ऑब्जेक्ट और लेंस और फोकल लंबाई के बीच की दूरी में अंतर को अधिक धुंधली कर देगा। नतीजतन, हम एक निश्चित स्थान पर एक धुंधले स्थान के रूप में स्थित देखेंगे: सर्किल ऑफ कन्फ्यूजन (सीओसी)। धब्बा त्रिज्या की गणना एक निश्चित कानून के अनुसार की जाती है:
 धब्बा व्यास का निर्धारण (अधिक विवरण के लिए विकिपीडिया देखें)।
धब्बा व्यास का निर्धारण (अधिक विवरण के लिए विकिपीडिया देखें)।रेंडरर्स में उपयोग किए जाने वाले तरीके
पिनहोल कैमरा मॉडल (जिसमें इनपुट एपर्चर → 0 है, और इसलिए, सभी ऑब्जेक्ट्स फोकस में होंगे) का उपयोग करते हैं। परिमित आकार के एपर्चर का अनुकरण करना और, इसलिए, क्षेत्र की गहराई के लिए, अतिरिक्त प्रयास की आवश्यकता होती है।
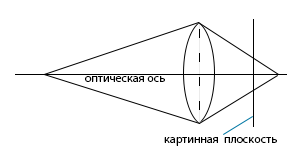 दृश्य में एक बिंदु को चित्र विमान पर एक प्रकीर्णन स्थान के रूप में पेश किया जाता है।
दृश्य में एक बिंदु को चित्र विमान पर एक प्रकीर्णन स्थान के रूप में पेश किया जाता है।सामान्य समीक्षा
फ़ील्ड की गहराई को लागू करने के तरीकों को दो बड़े समूहों में विभाजित किया जा सकता है: ऑब्जेक्ट स्पेस मेथड और इमेज स्पेस मेथड।
ऑब्जेक्ट स्पेस तरीके दृश्य वस्तुओं के 3 डी प्रतिनिधित्व के साथ काम करते हैं और इस प्रकार प्रतिपादन के दौरान लागू होते हैं। इमेज स्पेस मेथड्स, जिसे पोस्टप्रोसेस तरीकों के रूप में भी जाना जाता है, मानक पिनहोल कैमरा मॉडल (पूरी तरह से फोकस में) का उपयोग करके प्राप्त रास्टर छवियों पर काम करते हैं। क्षेत्र की गहराई के प्रभाव को प्राप्त करने के लिए, इन तरीकों ने गहराई के नक्शे को देखते हुए छवि के क्षेत्रों को धुंधला कर दिया। सामान्य तौर पर, ऑब्जेक्ट स्पेस मेथड्स अधिक शारीरिक रूप से सटीक परिणाम देने में सक्षम होते हैं और इनमें इमेज स्पेस तरीकों की तुलना में कम कलाकृतियां होती हैं, जबकि इमेज स्पेस मेथड ज्यादा तेज होते हैं।
ऑब्जेक्ट स्थान विधियाँ या तो ज्यामितीय प्रकाशिकी पर आधारित होती हैं, या तरंग प्रकाशिकी पर। अधिकांश अनुप्रयोग ज्यामितीय प्रकाशिकी का उपयोग करते हैं, जो कि अधिकांश लक्ष्यों को प्राप्त करने के लिए पर्याप्त है। हालांकि, विकृत छवियों में, विवर्तन और हस्तक्षेप एक महत्वपूर्ण भूमिका निभा सकते हैं; उन्हें ध्यान में रखने के लिए, लहर प्रकाशिकी के नियमों को लागू करना आवश्यक है।
इमेज स्पेस मेथड्स को जेनरेट की गई इमेजेज और डिजिटल फोटोग्राफी पर अप्लाई करने वालों में बांटा जा सकता है। पारंपरिक पोस्ट-प्रोसेसिंग तकनीकों के लिए एक गहन मानचित्र की आवश्यकता होती है, जिसमें कैमरे से छवि बिंदु की दूरस्थता के बारे में जानकारी होती है, लेकिन तस्वीरों के लिए ऐसा नक्शा प्राप्त करना मुश्किल होता है। प्रकाश क्षेत्रों की एक दिलचस्प तकनीक है जो आपको गहराई से नक्शे के बिना वस्तुओं को ध्यान से बाहर धुंधला करने की अनुमति देती है। प्रौद्योगिकी का नुकसान यह है कि इसके लिए विशेष उपकरण की आवश्यकता होती है, लेकिन परिणामी छवियों में दृश्य की जटिलता पर प्रतिबंध नहीं होता है।
ऑब्जेक्ट स्पेस दृष्टिकोण
वितरित किरण अनुरेखण
विधि सीधे ज्यामितीय प्रकाशिकी का अनुकरण करती है। प्रति नमूना एक किरण का पता लगाने के बजाय (मूल में, यह एक पिक्सेल है, लेकिन मुझे लगा कि यह अनुचित था, क्योंकि गणना की गई किरणों की संख्या एए सेटिंग्स के आधार पर बदल जाएगी और शायद ही कभी एक पिक्सेल के बराबर होती है), जो एक पिनहोल कैमरा का अनुकरण करती है, आपको कई किरणों का चयन करने की आवश्यकता होती है एक अनुरूप एपर्चर के साथ एक कैमरा के साथ प्राप्त एक एनालॉग छवि प्राप्त करने के लिए। प्रत्येक नमूने के लिए किरणें चित्र तल पर एक बिंदु से आती हैं, लेकिन लेंस के विभिन्न भागों में निर्देशित होती हैं। लेंस द्वारा अपवर्तन के बाद, बीम को दृश्य में उत्सर्जित किया जाता है।
विवरण से पता चलता है कि छवि का गठन होता है, प्रकाशिकी के भौतिक नियमों को ध्यान में रखते हुए (लहर को छोड़कर)। इसलिए, इस तरह से प्राप्त की गई छवियां काफी यथार्थवादी हैं और उन्हें "स्वर्ण मानक" माना जाता है जिसके द्वारा आप पोस्ट-प्रोसेसिंग विधियों की जांच कर सकते हैं। इस पद्धति का नुकसान स्पष्ट है: प्रत्येक नमूने के लिए, आपको उच्च-गुणवत्ता वाले धुंधला प्राप्त करने के लिए पर्याप्त रूप से किरणों की संख्या की गणना करने की आवश्यकता है, क्रमशः, प्रतिपादन समय बढ़ता है। यदि आप क्षेत्र की उथली गहराई प्राप्त करना चाहते हैं, तो आपको रेंडरिंग समय को सैकड़ों या हजारों बार बढ़ाना होगा। यदि आप धुंधले क्षेत्रों में अतिरिक्त किरणों की अपर्याप्त संख्या का उपयोग करते हैं, तो शोर दिखाई देगा।
यह विधि mia_lens_bokeh shader में कार्यान्वित की गई है:
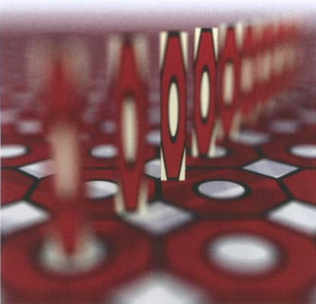 शेडर को लागू करने का परिणाम (कोड मैनुअल मानसिक किरण से लिया गया है, चित्र वहां से है)।
शेडर को लागू करने का परिणाम (कोड मैनुअल मानसिक किरण से लिया गया है, चित्र वहां से है)।यथार्थवादी कैमरा मॉडल
पिछली विधि में, लेंस में अपवर्तन की गणना एक नियम के अनुसार की गई थी। हालांकि, यह हमेशा मामला नहीं होता है। लेंस में विभिन्न गुणों वाले लेंस के समूह होते हैं:
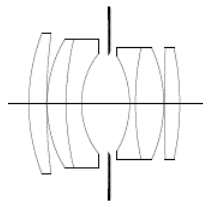 लेंस में समूह (पैट हैन्रान द्वारा चित्र)।
लेंस में समूह (पैट हैन्रान द्वारा चित्र)।निर्माताओं द्वारा प्रदान किए गए ऑप्टिकल लेंस विनिर्देशों को गणितीय मॉडल के रूप में सही ढंग से लागू किया जाता है। मॉडल में लेंस समूहों का एक सिमुलेशन शामिल है और आउटलेट का एक मॉडल भी प्रदान करता है (जिसके भीतर रेंडरर एक नमूने के लिए किरणों का उत्सर्जन करेगा)। आउटलेट में प्रवेश करने वाली किरणों की गणना की जाती है, लेंस समूहों के ऑप्टिकल गुणों को ध्यान में रखते हुए जिसके माध्यम से वे गुजरते हैं।
विधि क्षेत्र की गहराई और लेंस द्वारा शुरू की गई विकृतियों दोनों को शारीरिक रूप से सही ढंग से अनुकरण करने की अनुमति देती है।
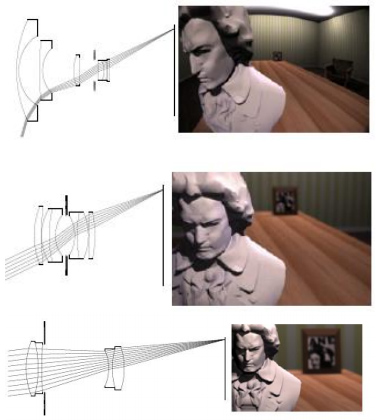 विभिन्न फोकल लंबाई के साथ लेंस: फोकल लंबाई और लेंस मॉडल में बदलाव के साथ, परिप्रेक्ष्य में बदलाव और विकृतियां दिखाई दे सकती हैं (उदाहरण के लिए, जैसा कि शीर्ष चित्र में है) - पैट हैनाहन चित्र।
विभिन्न फोकल लंबाई के साथ लेंस: फोकल लंबाई और लेंस मॉडल में बदलाव के साथ, परिप्रेक्ष्य में बदलाव और विकृतियां दिखाई दे सकती हैं (उदाहरण के लिए, जैसा कि शीर्ष चित्र में है) - पैट हैनाहन चित्र।एक shader का एक उदाहरण जो एक fisheye लेंस को लागू करता है:
struct fisheye { miColor outside_color; }; miBoolean fisheye (miColor *result, miState *state, struct fisheye *params ) { miVector camera_direction; miScalar center_x = state->camera->x_resolution / 2.0; miScalar center_y = state->camera->y_resolution / 2.0; miScalar radius = center_x < center_y ? center_x : center_y; miScalar distance_from_center = miaux_distance(center_x, center_y, state->raster_x, state->raster_y); if (distance_from_center < radius) { mi_vector_to_camera(state, &camera_direction, &state->dir); camera_direction.z *= miaux_fit(distance_from_center, 0, radius, 1, 0); mi_vector_normalize(&camera_direction); mi_vector_from_camera(state, &camera_direction, &camera_direction); return mi_trace_eye(result, state, &state->org, &camera_direction); } else { *result = *mi_eval_color(¶ms->outside_color); return miTRUE; } }
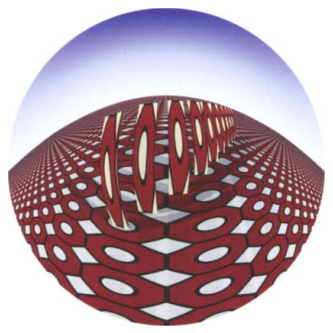 शेडर को लागू करने का परिणाम (कोड मैनुअल मानसिक किरण से लिया गया है, चित्र वहां से है)।
शेडर को लागू करने का परिणाम (कोड मैनुअल मानसिक किरण से लिया गया है, चित्र वहां से है)।संचय बफर
एक संचय बफर का उपयोग क्षेत्र की गहराई के प्रभाव को प्राप्त करने के लिए भी किया जा सकता है। कई फ्रेम प्रस्तुत किए जाते हैं, जिसके बाद, उन्हें औसत करने पर, हमें वांछित छवि मिलती है। विधि बहुत ही वितरित किरण अनुरेखण के समान है, लेकिन इसकी तुलना में तेज़ है, क्योंकि रेंडरिंग हार्डवेयर का उपयोग करके होता है। हालांकि, पहली विधि में, हम नमूनों की संख्या को अनुकूल रूप से नियंत्रित कर सकते हैं और कम नमूनों का उपयोग करके स्वीकार्य गुणवत्ता की तस्वीर प्राप्त कर सकते हैं। यह विधि केवल वहां लागू होती है जहां दृश्य हार्डवेयर-मध्यस्थ हो सकता है।
वेव प्रचार सिमुलेशन (वाव प्रचार)
ऊपर चर्चा की गई सभी विधियां ज्यामितीय प्रकाशिकी के नियमों का उपयोग करती हैं, विवर्तन और हस्तक्षेप को अनदेखा करती हैं। यदि एक निश्चित तरंग दैर्ध्य के प्रकाश उत्सर्जित करने वाले दृश्य में कई बिंदु स्रोत हैं, तो आप अंतरिक्ष में प्रकाश तरंगों के प्रसार को ट्रैक कर सकते हैं। चित्र विमान एक निश्चित दूरी पर स्थित है और नमूने के मूल्य को निर्धारित करने के लिए, सूत्रों द्वारा उत्सर्जित सभी तरंगों से योगदान को ध्यान में रखा गया है। फूरियर रूपांतरण का उपयोग करके आवृत्ति डोमेन में गणना की जा सकती है।
स्कैटर [क्रिवानेक]
प्रतिपादन करते समय, दृश्य को ज्यामितीय प्राइमेटिक्स के सेट के रूप में बनावट के साथ प्रस्तुत नहीं किया जाता है, लेकिन अंकों के एक सेट के रूप में। अंक एक निश्चित कानून के अनुसार बिखरे हुए हैं, सबसे अधिक बार गाऊसी। अधिक गति प्राप्त करने के लिए, जब बिखरने वाले बिंदु, एक कनवल्शन ऑपरेशन का उपयोग किया जाता है जो बिंदु प्रसार फ़ंक्शन (PSF) को ध्यान में रखता है। गाऊसी धब्बा के मामले में, पीएसएफ पैरामीटर मानक विचलन है।
प्राप्त बिंदुओं को एक पेड़ में संग्रहीत किया जाता है और धुंधले क्षेत्र से एक बिंदु चुनते समय, खोज एक निश्चित दायरे में की जाती है। यह आपको छवि के विकृत क्षेत्रों में कम नमूनों की गणना करने की अनुमति देता है।
यह मानना तर्कसंगत है कि विधि की एक सख्त सीमा आवश्यक रूप में दृश्य का प्रतिनिधित्व करने की क्षमता है।
 बिखरी हुई छवि। धुंधले क्षेत्रों में, नमूना घनत्व कम है (जारोस्लाव क्रिवानेक द्वारा चित्र)।
बिखरी हुई छवि। धुंधले क्षेत्रों में, नमूना घनत्व कम है (जारोस्लाव क्रिवानेक द्वारा चित्र)।विश्लेषणात्मक दृश्यता [कैटमुल]
त्रि-आयामी दृश्य होने पर, आप विश्लेषणात्मक रूप से यह निर्धारित कर सकते हैं कि कौन सी वस्तुएं ध्यान से बाहर हैं। ऐसी वस्तुओं के लिए, कम संख्या में नमूने लिए जाते हैं, जिसके परिणामस्वरूप वे धुंधले दिखाई देते हैं। विधि आपको वितरित किरण अनुरेखण के विपरीत, बिना शोर के सटीक चित्र प्राप्त करने की अनुमति देती है।
छवि-अंतरिक्ष दृष्टिकोण
एक आदर्श पोस्ट-प्रोसेसिंग विधि में निम्नलिखित गुण होने चाहिए:
- एक बिंदु प्रसार समारोह (PSF) चुनना
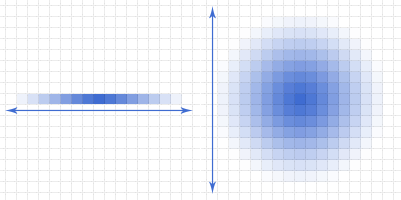
धब्बा का प्रकार पीएसएफ पर निर्भर करता है, जो यह निर्धारित करता है कि हम एक बिंदु से किस तितर बितर स्थान को प्राप्त करते हैं। चूंकि यह विशेषता विभिन्न ऑप्टिकल सिस्टम में भिन्न होगी, इसलिए एक अच्छी विधि को पीएसएफ के प्रकार को चुनने की अनुमति देनी चाहिए।
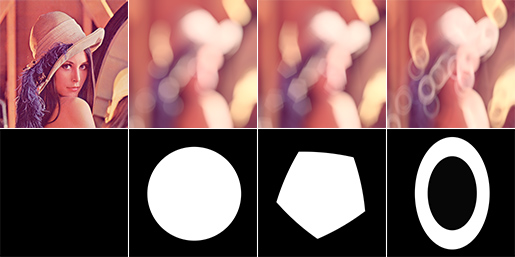
विभिन्न पीएसएफ आपको एक अलग ब्लर पैटर्न प्राप्त करने की अनुमति देते हैं। - पिक्सेल धब्बा नियंत्रण
छवि के प्रत्येक बिंदु पर, प्रकीर्णन स्थान का आकार और प्रकृति अलग है। आमतौर पर, पोस्ट-प्रोसेसिंग तरीके आपको बिंदु की स्थिति के आधार पर धब्बा की प्रकृति को बदलने की अनुमति नहीं देते हैं। यह इस तथ्य के कारण भी है कि अक्सर विधियां अलग-अलग फिल्टर या फूरियर रूपांतरण का उपयोग करती हैं, जो इस तरह के विकल्प को लागू करना मुश्किल बनाता है।
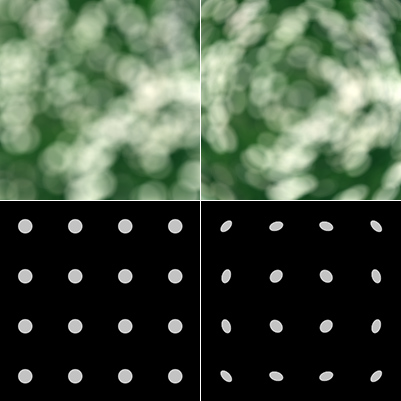
पहली छवि में, पीएसएफ समान है; दूसरा एक परिवर्तन, जो कुछ लेंसों के हेलिओस -44 विशेषताओं को अधिक सटीक रूप से अनुकरण करता है। - तीव्रता में कमी (तीव्रता रिसाव कलाकृतियों) की कलाकृतियों की कमी
पृष्ठभूमि में धुंधली वस्तु कभी भी फोकस में वस्तु की सीमाओं से परे नहीं जाती है। हालांकि, आदिम रैखिक फिल्टर इस तथ्य को ध्यान में नहीं रख सकते हैं; इस त्रुटि के परिणामस्वरूप दिखाई गई तीव्रता की कमी की कलाकृतियां छवि के यथार्थवाद को कम करती हैं।
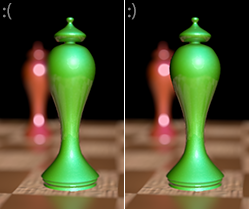
छवि में, हरे रंग का आंकड़ा ध्यान में है, इसलिए, पृष्ठभूमि में ऑब्जेक्ट को धुंधला करना इसका विस्तार नहीं करना चाहिए। - निरंतर विरूपता कलाकृतियों के कारण कलाकृतियों का अभाव
हकीकत में, अग्रभूमि में वस्तु को धुंधला करना नरम होगा, वस्तु में दृश्यमान कठोर रूपरेखा नहीं होगी। अक्सर फ़िल्टर वस्तु को धुंधला कर देते हैं ताकि उसमें एक साथ धब्बा और सिल्हूट दोनों हों, जो कि गलत है। यह व्यवहार गहराई के मानचित्र को सुचारू करने की विशेषताओं के कारण है, जिसके परिणामस्वरूप गहराई वस्तु की सीमा पर चरणबद्ध रूप से बदल जाती है (और यह वस्तु के किनारे पर मिश्रित रंगों के पिक्सेल को बाहर और साथ ही बाहर की ओर मोड़ती है)।
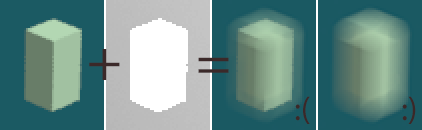
विभिन्न फिल्टर लगाने का परिणाम। इस तथ्य के कारण कि छवि (सौंदर्य मानचित्र) को सुचारू किया गया है, लेकिन गहराई का नक्शा (गहराई का नक्शा) नहीं है, ऐसी कलाकृतियां हो सकती हैं। - वस्तुओं के आंशिक चौराहे का सही अनुकरण (आंशिक रोड़ा)
वास्तव में, मोर्चे पर विक्षेपित वस्तुओं में सुचारू रूप से धुंधली सीमाएं होती हैं, जिसके माध्यम से पीछे स्थित वस्तुएं दिखाई देती हैं। इस आशय को आंशिक चौराहा कहा जाता है क्योंकि पीछे की वस्तु केवल आंशिक रूप से सामने से अवरुद्ध होती है। यदि हम एक पिनहोल कैमरा के माध्यम से देख रहे थे तो हम पृष्ठभूमि में ऑब्जेक्ट के इन दृश्य क्षेत्रों को नहीं देख सकते थे। प्रभाव के एक ज्यामितीय स्पष्टीकरण के लिए, आंकड़ा देखें। क्योंकि एक पिनहोल कैमरा पर प्राप्त छवियों के साथ बाद के प्रसंस्करण के तरीके काम करते हैं, एक आंशिक चौराहे का अनुकरण करना एक मुश्किल काम है: उपलब्ध बिंदुओं से अदृश्य बिंदुओं का रंग अतिरिक्त रूप से अलग होना चाहिए।
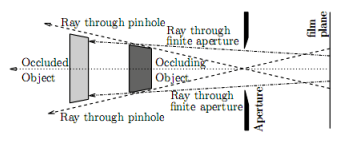
वस्तुओं का आंशिक चौराहा (चित्र बार्स्की)। - उच्च प्रदर्शन
छवि अंतरिक्ष में "सीधे" लागू किए गए फ़िल्टर का प्रदर्शन (मतलब फ़िल्टर का सबसे सरल कार्यान्वयन), बढ़ते हुए त्रिज्या के साथ घटता है। बड़ी रेडी के लिए, प्रक्रिया में कई मिनट लग सकते हैं। आदर्श रूप से, मैं चाहता हूं कि फ़िल्टर को वास्तविक समय में लागू किया जाए, जो हमेशा संभव नहीं होता है।
रैखिक फ़िल्टरिंग [पोटेमिल और चक्रवर्ती]
प्रसंस्करण के बाद के चरण में डीओएफ पाने वाले पहले तरीकों में से एक। बिंदु की गहराई (गहराई के नक्शे द्वारा निर्धारित) के आधार पर, धब्बा फ़ंक्शन (PSF) के पैरामीटर बदलते हैं। PSF का दायरा जितना बड़ा होगा, फिल्टर का प्रदर्शन उतना ही कम होगा। फ़िल्टर सूत्र द्वारा व्यक्त किया जा सकता है:
 जहां B धुंधली छवि है, psf फ़िल्टर कोर है, x और y आउटपुट छवि में निर्देशांक हैं, S मूल छवि है, i और j इनपुट छवि में निर्देशांक हैं।
जहां B धुंधली छवि है, psf फ़िल्टर कोर है, x और y आउटपुट छवि में निर्देशांक हैं, S मूल छवि है, i और j इनपुट छवि में निर्देशांक हैं।पीएसएफ कुछ मायने में ऑप्टिकल प्रभाव जैसे विवर्तन और हस्तक्षेप को ध्यान में रख सकता है। विधि का नुकसान: तीव्रता की कमी, गैर-निरंतर गहराई।
रे वितरण बफर [शिन्या]
विधि वस्तुओं की दृश्यता को ध्यान में रखते हुए सुझाव देती है, जिससे हम तीव्रता की कमी से छुटकारा पा सकते हैं। एक धुंधली छवि बनाने के बजाय, प्रत्येक बिंदु के लिए सबसे पहले एक बफर बनाया जाता है जो उससे निकलने वाली किरणों के वितरण के लिए होता है। इस तरह के बफर में संभव निर्देशांक शामिल हैं, जिस पर एक बिंदु से प्रकाश गहराई के साथ आ सकता है। सभी बिंदुओं के लिए किरण वितरण बफ़र्स की गणना करने के बाद, औसत रंग मूल्य की गणना की जाती है। विधि रेखीय फ़िल्टरिंग की तुलना में वस्तुओं की दृश्यता के साथ सही ढंग से काम करती है, लेकिन अधिक मेमोरी और गणना की आवश्यकता होती है। ध्यान दें कि RDB विधि द्वारा प्राप्त नक्शे के सेट को प्रकाश क्षेत्र कहा जाता है।
स्तरित DoF [स्कोफील्ड]
विधि वस्तुओं के स्थान के एक विशेष मामले के लिए अभिप्रेत है: वस्तुओं को चित्र विमान के समानांतर होना चाहिए। ऑब्जेक्ट्स को परतों में विभाजित किया जाता है, फ़्रीक्वेंसी डोमेन में परतों को अलग से धोया जाता है (तेज़ फ़ूरियर ट्रांसफॉर्म का उपयोग करके)। एफएफटी प्रदर्शन को प्रभावित किए बिना बड़े त्रिज्या पीएसएफ के उपयोग की अनुमति देता है। विधि में तीव्रता की कमी की कमी नहीं है और बहुत जल्दी काम करता है, लेकिन इसका दायरा बहुत सीमित है।
अंतर्ज्ञान और विवेक [बार्स्की]
पिछली पद्धति द्वारा लगाया गया प्रतिबंध बहुत सख्त है। छवि को परतों में विभाजित किया गया है, इसलिए छवि के नमूनों की गहराई को निकटतम परत की चयनित गहराई तक गोल किया गया है। परिणामी छवि में परतों के चौराहे की रेखाओं के साथ धारियों या कठोर सीमाओं के रूप में विवेकाधिकार कलाकृतियां होंगी। इस पद्धति में, सीमाओं को खोजने की विधि द्वारा प्राप्त वस्तुओं की आईडी का उपयोग करके (या ऑब्जेक्ट मैप से) इस तरह की कलाकृतियों की समस्या को हल किया जाता है। यदि एक वस्तु दो परतों की है, तो परतें विलीन हो जाती हैं। विधि के साथ एक और समस्या आंशिक चौराहे है। पृष्ठभूमि में वस्तुओं को धुंधला करने के लिए, दृश्य नमूनों द्वारा सन्निकटन का उपयोग किया जाता है।
 ऊपरी छवि में काली धारियां दिखाई देती हैं - ऑब्जेक्टआईड (बार्स्की पिक्चर) का उपयोग किए बिना परत-दर-परत धब्बा लगाने के परिणामस्वरूप कलाकृतियां।
ऊपरी छवि में काली धारियां दिखाई देती हैं - ऑब्जेक्टआईड (बार्स्की पिक्चर) का उपयोग किए बिना परत-दर-परत धब्बा लगाने के परिणामस्वरूप कलाकृतियां।दृष्टि-यथार्थवादी प्रतिपादन [कोल्ब]
मानव आंख को एक विश्लेषणात्मक मॉडल के रूप में वर्णन करना मुश्किल है, जिसमें कई लेंस शामिल हैं - यह लेंस के लिए कैसे किया जा सकता है। इस पद्धति में, वेवफ्रंट एब्रोमीटर (मुझे इसका अनुवाद करने की हिम्मत नहीं हुई) नामक एक विशेष उपकरण का उपयोग करके मानव आंख के अनुरूप पीएसएफ का एक सेट निर्धारित किया जाता है। इसके बाद, परत-दर-परत धब्बा का उपयोग परिणामस्वरूप पीएसएफ के अनुसार किया जाता है। विधि आपको दृश्य रोगों वाले लोगों को छवियों को प्राप्त करने की अनुमति देती है।
 केराटोकोनस (चित्र बार्स्की) से पीड़ित व्यक्ति की आंख की ख़ासियत को ध्यान में रखते हुए चित्र।
केराटोकोनस (चित्र बार्स्की) से पीड़ित व्यक्ति की आंख की ख़ासियत को ध्यान में रखते हुए चित्र।महत्व के आदेश [डर]
रेंडरर्स के एंटीलियाजिंग तंत्र के लिए विधि समान रूप से काम करती है: सबसे पहले, एक कम-रिज़ॉल्यूशन छवि बनाई जाती है, जिसके बाद अगले नमूने में रंग परिवर्तन सीमा से अधिक हो जाता है और मूल छवि के अधिक नमूनों को अंतिम छवि के पिक्सेल को प्राप्त करने के लिए लिया जाता है, और इसी तरह। इस प्रकार, विधि कम समय में बेहतर गुणवत्ता प्राप्त करती है।
हाइब्रिड अवधारणात्मक हाइब्रिड विधि [Mulder और van Lier]
छवि की मानवीय धारणा की विशेषताएं ऐसी हैं कि केंद्र में विवरण छवि के किनारों के साथ विवरण से अधिक महत्वपूर्ण हैं। छवि का केंद्र धीमी और अधिक सटीक तरीके से धुंधला हो सकता है, जबकि परिधि एक त्वरित धब्बा सन्निकटन का उपयोग करता है। तेजी से धुंधला होने के लिए, एक गाऊसी पिरामिड का उपयोग किया जाता है, पिक्सेल गहराई के आधार पर धुंधला स्तर चुना जाता है; परिणाम में कलाकृतियां हैं।
बार-बार दृढ़ विश्वास
विधि इंटरैक्टिव अनुप्रयोगों में त्वरित आवेदन के लिए करना है। यह हार्डवेयर उपकरणों पर काम करता है जहां 3x3 पिक्सेल कोर के साथ कनवल्शन ऑपरेशन को प्रभावी ढंग से लागू करना संभव है। दृढ़ संकल्प कई बार किया जाता है, जिससे बड़ी मात्रा में धब्बा प्राप्त होता है। धब्बा त्रिज्या बढ़ने पर प्रदर्शन कम हो जाता है। PSF पर प्रतिबंध है: यह गाऊसी होना चाहिए।
GPU क्षेत्र की गहराई [शेयूरेमैन और तातारचुक]
फ़ील्ड की गहराई को GPU पर भी पढ़ा जा सकता है। तरीकों में से एक स्केयूरेमैन और तातारचुक द्वारा प्रस्तावित किया गया था।
प्रकाशिकी के नियमों के अनुसार, पिक्सेल की गहराई को देखते हुए, हम बिखरने वाले स्थान की भयावहता का निर्धारण करते हैं, और उस स्थान के भीतर हम नमूने का चयन करते हैं जो परिणामस्वरूप पिक्सेल रंग बनाते हैं। मेमोरी को अनुकूलित करने के लिए, छवि के उन क्षेत्रों में जहां CoC का एक बड़ा त्रिज्या है, पिक्सल को इनपुट छवि से नहीं लिया जाता है, बल्कि कई बार कम किया जाता है। तीव्रता की कमी की कलाकृतियों की संख्या को कम करने के लिए, पिक्सल की गहराई को भी ध्यान में रखा जाता है। विधि में गहराई की निरंतरता की कलाकृतियां हैं।
इंटीग्रल मैट्रिक्स (सारांश क्षेत्र तालिका) [हेंसले]
सीओसी के भीतर नमूने के विकल्प के रूप में, छवि के पिक्सेल क्षेत्र का औसत रंग एक एकीकृत मैट्रिक्स (सैट) का उपयोग करके पाया जा सकता है। इस मामले में, गणना की गति अधिक है और धब्बा त्रिज्या में वृद्धि के साथ नहीं गिरती है, इसके अलावा, कम संकल्प छवि उत्पन्न करने की कोई आवश्यकता नहीं है। प्रारंभ में, विधि पाठ को चौरसाई करने के लिए थी, लेकिन बाद में इसे GPU सहित फ़ील्ड की गहराई के लिए अनुकूलित किया गया था। विधि में लगभग सभी प्रकार की कलाकृतियां हैं।
पिरामिड विधि [क्रूस और स्ट्रेंगर्ट]
गहराई के आधार पर दृश्य को परतों में विभाजित किया गया है। परत सीमा के करीब आने वाले पिक्सेल निकटतम परत से संबंधित नहीं होते हैं, लेकिन आंशिक रूप से कई परतों से जुड़े होते हैं: यह परत सीमाओं पर नमूना कलाकृतियों को समाप्त करता है। फिर परतों में अनुपस्थित पिक्सेल के मान (जो अग्रभूमि में वस्तुओं द्वारा कवर किए गए हैं) अतिरिक्त हैं। उसके बाद, प्रत्येक परत को
पिरामिड विधि द्वारा धोया जाता
है , बिंदु वजन का उपयोग कलाकृतियों को बाहर करने के लिए किया जाता है। परिणामस्वरूप परतें परतों की पारदर्शिता को ध्यान में रखते हुए मिश्रित होती हैं। एफएफटी का उपयोग करते हुए स्तरित तरीकों की तुलना में विधि तेज है, लेकिन उपयोग किए गए पीएसएफ पर प्रतिबंध लगाता है।
 पिरामिड विधि (मैग्नस स्ट्रेंगर्ट तस्वीर) का उपयोग करके छवि को धुंधला किया गया था।
पिरामिड विधि (मैग्नस स्ट्रेंगर्ट तस्वीर) का उपयोग करके छवि को धुंधला किया गया था।अलग धब्बा [झोउ]
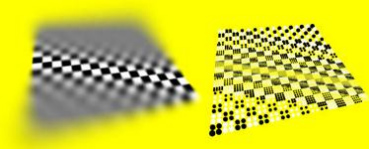
उसी तरह से जैसे कि शास्त्रीय धब्बा विधियों में जो गहराई (बॉक्स धुंधला, गाऊसी धब्बा) को ध्यान में नहीं रखते हैं, क्षेत्र की गहराई की गणना करने के लिए अलग-अलग PSF का उपयोग किया जा सकता है। सबसे पहले, छवि क्षैतिज रूप से धुंधला हो जाती है, फिर लंबवत - परिणामस्वरूप, हमें एक गति मिलती है जो स्पॉट के क्षेत्र पर निर्भर करती है, न कि तीखेपन पर, लेकिन इसके व्यास पर। विधि को GPU पर लागू किया जा सकता है और इसे वास्तविक समय में लागू किया जा सकता है। अलग-अलग कार्यों का उपयोग करने का विचार चित्र में चित्रित किया गया है:
 अलग-अलग धुंधला होने के साथ, प्रदर्शन PSF के क्षेत्र पर निर्भर नहीं करता है, लेकिन इसके व्यास पर।
अलग-अलग धुंधला होने के साथ, प्रदर्शन PSF के क्षेत्र पर निर्भर नहीं करता है, लेकिन इसके व्यास पर।यह ध्यान देने योग्य है कि एक अन्य कार्य में बार्स्की ने जोर दिया कि उचित धुंधलापन, गहराई को ध्यान में रखते हुए, अलग नहीं किया जा सकता है: इस पद्धति का उपयोग करते समय, कुछ मामलों में कलाकृतियां संभव हैं।
नकली गर्मी प्रसार [बार्स्की, कोस्लोफ़, बर्टाल्मियो, कास]
हीट अपव्यय एक शारीरिक प्रक्रिया है जिसमें धुंधलापन भी देखा जा सकता है (हालांकि यह प्रकाशिकी से संबंधित नहीं है)। यदि ताप कंडक्टर में तापमान समान रूप से वितरित नहीं किया जाता है, तो हम समय के साथ धुंधला दिखाई देंगे। इस तरह के धुंधलापन के प्रभाव का वर्णन करने वाले विभेदक समीकरणों का उपयोग क्षेत्र की गहराई का अनुकरण करने के लिए किया जा सकता है। यहां तक कि पर्याप्त रूप से बड़े ब्लर रेडीआई के लिए, विधि को वास्तविक समय में GPU पर लागू किया जा सकता है।
 इस पद्धति में गहराई के नक्शे के बजाय उपयोग किए जाने वाले स्थिति मानचित्र में बिंदु के तीन आयामों के बारे में जानकारी होती है, न कि केवल गहराई (बार्स्की चित्र) के बारे में।
इस पद्धति में गहराई के नक्शे के बजाय उपयोग किए जाने वाले स्थिति मानचित्र में बिंदु के तीन आयामों के बारे में जानकारी होती है, न कि केवल गहराई (बार्स्की चित्र) के बारे में।क्षेत्र की सामान्यीकृत और अर्थ गहराई
अब तक, हमने उन तरीकों का वर्णन किया है जो क्षेत्र की गहराई का अनुकरण करते हैं जैसा कि प्रकृति में होता है। हालाँकि, धुंधलापन वैसा नहीं हो सकता है जैसा कि हम उसका पालन करते थे। कंप्यूटर ग्राफिक्स में, हम शारीरिक रूप से वसूली योग्य लेंस मॉडल तक सीमित नहीं हैं, इसलिए धब्बा क्षेत्र को मनमाने ढंग से सेट किया जा सकता है - उदाहरण के लिए, हम कई लोगों को भीड़ से अलग कर सकते हैं। विधि को धब्बा नक्शे के रूप में भौतिक के अलावा अन्य कानूनों का उपयोग करके गर्मी लंपटता का अनुकरण करने की विधि के रूप में लागू किया जा सकता है।
 शारीरिक रूप से गलत धब्बा (कोसलॉफ़ और बार्स्की द्वारा चित्र)
शारीरिक रूप से गलत धब्बा (कोसलॉफ़ और बार्स्की द्वारा चित्र)हलके खेत
प्रकाश क्षेत्रों को मूल रूप से एक विधि के रूप में वर्णित किया गया था जो विभिन्न बिंदुओं से एक दृश्य की छवि का वर्णन करता है, जो दृश्य की जटिलता से स्वतंत्र है। प्रकाश क्षेत्रों को कोड करने के लिए मानक विधि दो-विमान पैरामीरीज़ेशन है। दो समानांतर विमानों का चयन किया जाता है; दोनों विमानों पर एक बिंदु द्वारा प्रत्येक किरण का वर्णन किया गया है। परिणाम एक चार आयामी डेटा संरचना है। प्राप्त आंकड़ों में हेरफेर किया जा सकता है, जैसे फोकस विमान या क्षेत्र की गहराई को बदलना।
हम यह कह सकते हैं कि कैमरों में प्रकाश क्षेत्र (लेंस और मैट्रिक्स के विमानों के बीच) को स्वाभाविक रूप से एकीकृत किया जाता है: हम इस बात से अंतर नहीं करते हैं कि लेंस का प्रकाश किरण किस बिंदु से आया है। हालांकि, इसे ध्यान में रखते हुए, हम अंतःक्रियात्मक रूप से वर्णित डेटा संरचना के साथ सेंसर रीडिंग लेने के बाद क्षेत्र की गहराई का प्रबंधन कर सकते हैं।
इसके अलावा, हम चार-आयामी अंतरिक्ष में तेजी से फूरियर रूपांतरण का उपयोग करके छवि के विभिन्न हिस्सों पर ध्यान केंद्रित कर सकते हैं।
कंप्यूटर पर उत्पन्न छवियों में, विभिन्न कोणों से दृश्य प्रदान करके प्रकाश क्षेत्र डेटा प्राप्त करना आसान है।
ऐसे कैमरे (भौतिक) हैं जो प्रकाश क्षेत्रों की रिकॉर्डिंग करने में सक्षम हैं। सेंसर के सामने माइक्रोलेंस होते हैं जो अलग-अलग दिशाओं से आने वाले प्रकाश को अलग करते हैं।
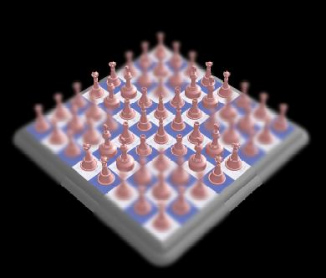
इस प्रकार, क्लासिक कैमरे के विपरीत, प्रकाश को एक बिंदु पर अभिव्यक्त नहीं किया जाता है, लेकिन दिशा के आधार पर वितरित किया जाता है। सेंसर के अनुसार, पहले से ही प्रोसेसिंग स्टेज पर, आप ऑब्जेक्ट को फोकस और ब्लर साइज में चुन सकते हैं। प्रकाश क्षेत्र: लिटरो सेंसर से रॉ छवि का एक छोटा सा हिस्सा। हम मैट्रिक्स के सामने स्थित माइक्रोलेव्स को देखते हैं।
प्रकाश क्षेत्र: लिटरो सेंसर से रॉ छवि का एक छोटा सा हिस्सा। हम मैट्रिक्स के सामने स्थित माइक्रोलेव्स को देखते हैं।स्पॉटिंग (डैपल्ड) फोटोग्राफी
, , , , . , - 800 11MPix. ( ).
, . , . , .
(defocus magnification)
«» , (, , ). ( , , — , , - ). , , .
, , , , . , . , (, «» , ) — . ( ), , , low-pass .
निष्कर्ष
, . 3D-, . , .
. , ( ).
संदर्भ
Brian A. Barsky ( )
. , - , , . - — , ( , ). [ ] . .