نشرت جوجل تقرير مايو عن اختبار أجهزة الروبوت
ظهر تقرير PDF صغير من فريق من المهندسين الذين يعملون على مشروع سيارة روبوتية على موقع مشروع سيارة ذاتية القيادة من Google . على ما يبدو ، سيتم نشر هذه الوثائق شهريا. على الرغم من حقيقة أن التقرير الحالي يحتوي على بضع صفحات فقط ، فإنه يصف بالتفصيل حوادث الطرق التي تمكنت خلال السنوات الست الماضية منذ بدء اختبار السيارات الآلية لعملاق البحث من الدخول إليه.بادئ ذي بدء ، توضح Google الأرقام: 23 مركبة لكزس RX450h SUV التي تسير على طول طرق كاليفورنيا ، خاصة في ماونتن فيو ، تشارك في البرنامج. بالإضافة إلى ذلك ، هناك 9 نماذج إضافية في مدافن النفايات المغلقة. منذ عام 2009 ، تمكنت السيارات الآلية من القيادة لمسافة 1،627،591 كيلومترًا في الوضع الآلي (وهذا يعني أنه يتم التحكم فيها فقط عن طريق البرامج ، ولا يلمس سائق عجلة القيادة في السيارة). في المتوسط ، على مدار أسبوع ، سافرت السيارات الآلية 16000 كم على الطرق المفتوحة.لمدة ست سنوات ، وقعت 12 حادثة تتعلق بالسيارات الآلية ، وكلها وقعت بسبب خطأ الناس. وقع أقرب حادث مايو مع لكزس عندما توقف عند الضوء الأحمر عند التقاطع في ماونتن فيو. في هذا الوقت ، دمرت سيارة يقودها الإنسان المصد الخلفي لكزس ، وبالتالي أتلفت أجهزة الاستشعار الموجودة عليه. كانت سرعة الجاني في تلك اللحظة حوالي 1.5 كم / ساعة فقط ، بحيث ينتهي الحادث دون ضرر جسيم.من المثير للاهتمام تقييم المواقف الصعبة التي تواجهها السيارات الآلية وكيف تمكنوا من الخروج منها: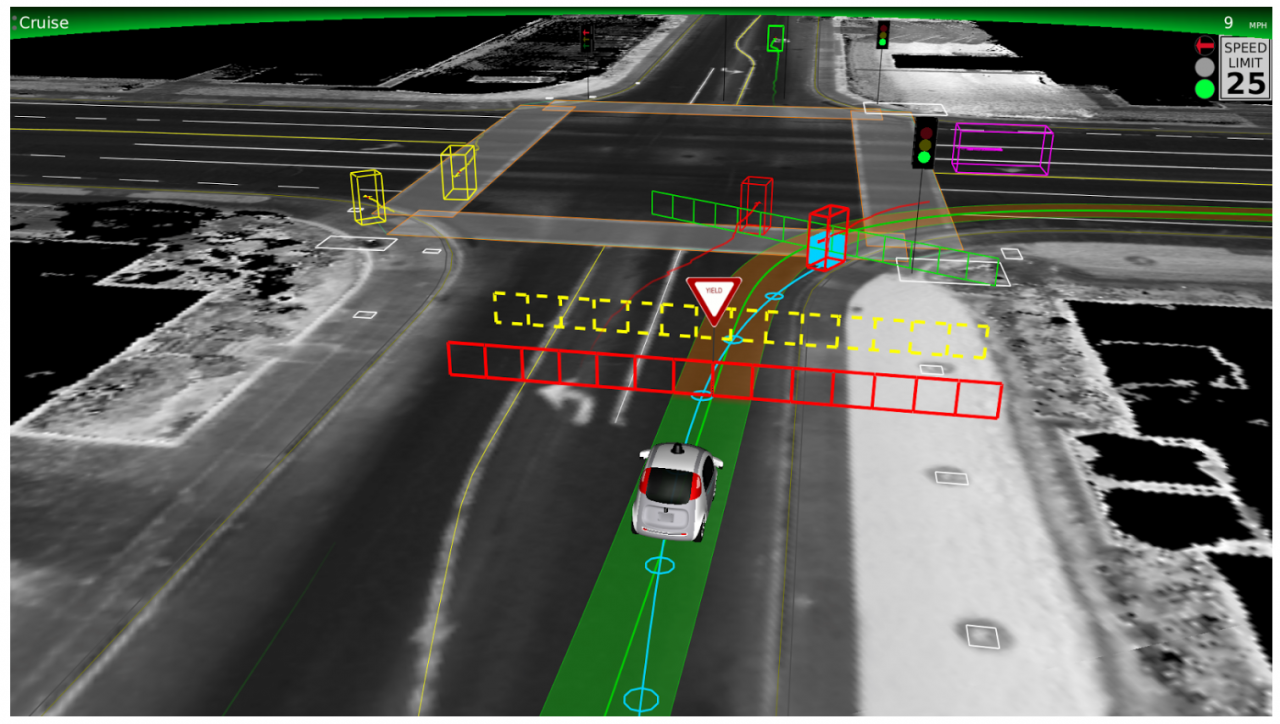 يوضح الرسم البياني أعلاه خطة الحركة لسيارة روبوتية عند التقاطع واثنين من راكبي الدراجات النارية ، والتي يتم تحديدها بواسطة متوازيات حمراء (خط أحمر مكسور هو الطريقة التي يتحركون بها). توقف Robokar عند التقاطع ، وفي ذلك الوقت غادر سائق الدراجة النارية فيما يتعلق به تقاطع بنجاح بنجاح وسار. لكن الدراجة النارية ، التي اتجهت يمينًا نحو السيارة الآلية ، لسبب غير معروف قدت إلى حركة المرور القادمة بحيث كانت مباشرة في مسار سيارة Google - يظهر مسارها المحسوب بخط أزرق. قرر برنامج السيارة التوقف وعدم المضي قدمًا ، مما يسمح لدراجة نارية بتجنب الاصطدام عند التقاطع. ونتيجة لذلك ، أخطأ الروبوت ودراجة نارية بعضهما البعض بأمان ، متجنبين المشاكل في حادث. الصعوبة الإضافية هي أن كل شيء حدث في الظلام ،وسيكون من الصعب على السائق البشري إعطاء تقييم صحيح للوضع.
يوضح الرسم البياني أعلاه خطة الحركة لسيارة روبوتية عند التقاطع واثنين من راكبي الدراجات النارية ، والتي يتم تحديدها بواسطة متوازيات حمراء (خط أحمر مكسور هو الطريقة التي يتحركون بها). توقف Robokar عند التقاطع ، وفي ذلك الوقت غادر سائق الدراجة النارية فيما يتعلق به تقاطع بنجاح بنجاح وسار. لكن الدراجة النارية ، التي اتجهت يمينًا نحو السيارة الآلية ، لسبب غير معروف قدت إلى حركة المرور القادمة بحيث كانت مباشرة في مسار سيارة Google - يظهر مسارها المحسوب بخط أزرق. قرر برنامج السيارة التوقف وعدم المضي قدمًا ، مما يسمح لدراجة نارية بتجنب الاصطدام عند التقاطع. ونتيجة لذلك ، أخطأ الروبوت ودراجة نارية بعضهما البعض بأمان ، متجنبين المشاكل في حادث. الصعوبة الإضافية هي أن كل شيء حدث في الظلام ،وسيكون من الصعب على السائق البشري إعطاء تقييم صحيح للوضع. Source: https://habr.com/ru/post/ar380391/
All Articles