 يوم السبت ، فاز فريق المعهد الكوري الرائد للعلوم والتكنولوجيا (KAIST) من كوريا الجنوبية بتحدي DARPA Robotics Robotics (DRC) في بومونا ، كاليفورنيا ، عندما هزم الروبوت ، الروبوت القابل للتكيف DRC-HUBO ، 22 روبوتًا آخر من خمس دول مختلفة و فاز بالجائزة النقدية الرئيسية البالغة 2 مليون دولار.
يوم السبت ، فاز فريق المعهد الكوري الرائد للعلوم والتكنولوجيا (KAIST) من كوريا الجنوبية بتحدي DARPA Robotics Robotics (DRC) في بومونا ، كاليفورنيا ، عندما هزم الروبوت ، الروبوت القابل للتكيف DRC-HUBO ، 22 روبوتًا آخر من خمس دول مختلفة و فاز بالجائزة النقدية الرئيسية البالغة 2 مليون دولار.
. , .
DRC-HUBO. , , ( ).
[ ] , – , - , KAIST. – - – .
 قال إن الروبوت الروبوت له مزايا عند العمل في مجتمع من الناس ، لكنه أراد تطوير تصميم يقلل من خطر السقوط: "فكرت في أشياء كثيرة ، وكان أبسط شيء هو العجلات على ركبتي."يمكن لـ DRC-HUBO تغيير الوضع والوقوف على قدمين والمشي والوصول إلى الأشياء المرتفعة والتحرك أيضًا في وضع أكثر استقرارًا على ركبتيك. قررتDARPA تنظيم جمهورية الكونغو الديمقراطية بعد حادثة فوكوشيما في اليابان ، على أمل التقدم في مجال الروبوتات. إلى مسابقة نهائيات جمهورية الكونغو الديمقراطيةوقد دعيت فرق تطوير الروبوتات شبه المستقلة ، وكان على العاملين البشريين العمل معا لنمذجة ظروف الكارثة. كانت الروبوتات التي أنشأتها الجامعات والشركات للمنافسة مختلفة تمامًا في الحجم والشكل ، من بينها الروبوتات ذات الأرجل والعجلات والهجينة. أصبح
قال إن الروبوت الروبوت له مزايا عند العمل في مجتمع من الناس ، لكنه أراد تطوير تصميم يقلل من خطر السقوط: "فكرت في أشياء كثيرة ، وكان أبسط شيء هو العجلات على ركبتي."يمكن لـ DRC-HUBO تغيير الوضع والوقوف على قدمين والمشي والوصول إلى الأشياء المرتفعة والتحرك أيضًا في وضع أكثر استقرارًا على ركبتيك. قررتDARPA تنظيم جمهورية الكونغو الديمقراطية بعد حادثة فوكوشيما في اليابان ، على أمل التقدم في مجال الروبوتات. إلى مسابقة نهائيات جمهورية الكونغو الديمقراطيةوقد دعيت فرق تطوير الروبوتات شبه المستقلة ، وكان على العاملين البشريين العمل معا لنمذجة ظروف الكارثة. كانت الروبوتات التي أنشأتها الجامعات والشركات للمنافسة مختلفة تمامًا في الحجم والشكل ، من بينها الروبوتات ذات الأرجل والعجلات والهجينة. أصبح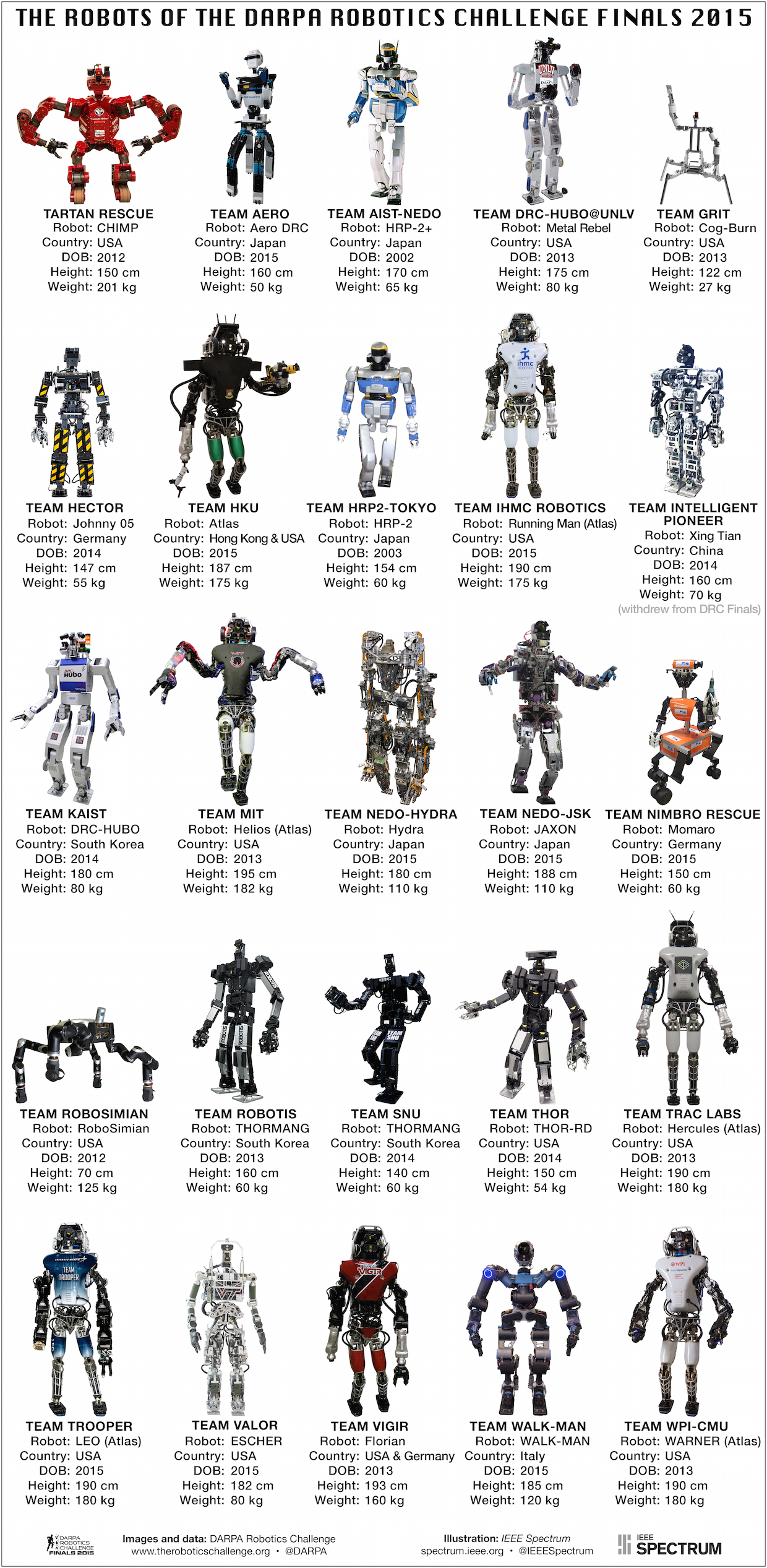 DRC-HUBO فائزًا لأنه كان قادرًا على إكمال جميع المهام الثماني بدون أخطاء في أقصر وقت (44 دقيقة. 28 ثانية). كان أداء الفرق الأخرى جيدًا أيضًا ، لكن الروبوتات الخاصة بهم فقدت الوقت بسبب التأخير. من بين الأفضل فريق Tartan Rescue ، فإن CHIMP الخاص به هو روبوت ذو أرجل ومسارات كاتربيلر ، والذي كان قادرًا على العودة إلى المهام بعد السقوط ؛ مومارومن فريق جامعة بون - سيارة بسيطة وأنيقة على عجلات برأس دوار ويدين ؛ RoboSimian من مختبر الدفع النفاث التابع لناسا ، مع أربع أرجل وحركات تشبه اليوجا ؛ ATLAS من فريق IHMC هو إنسان آلي كهربائي كبير تم تطويره بواسطة Boston Dynamics .
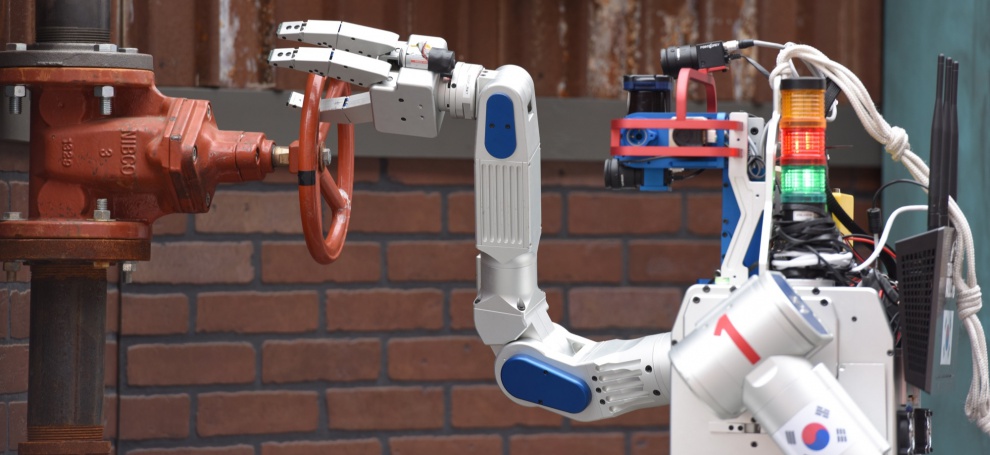
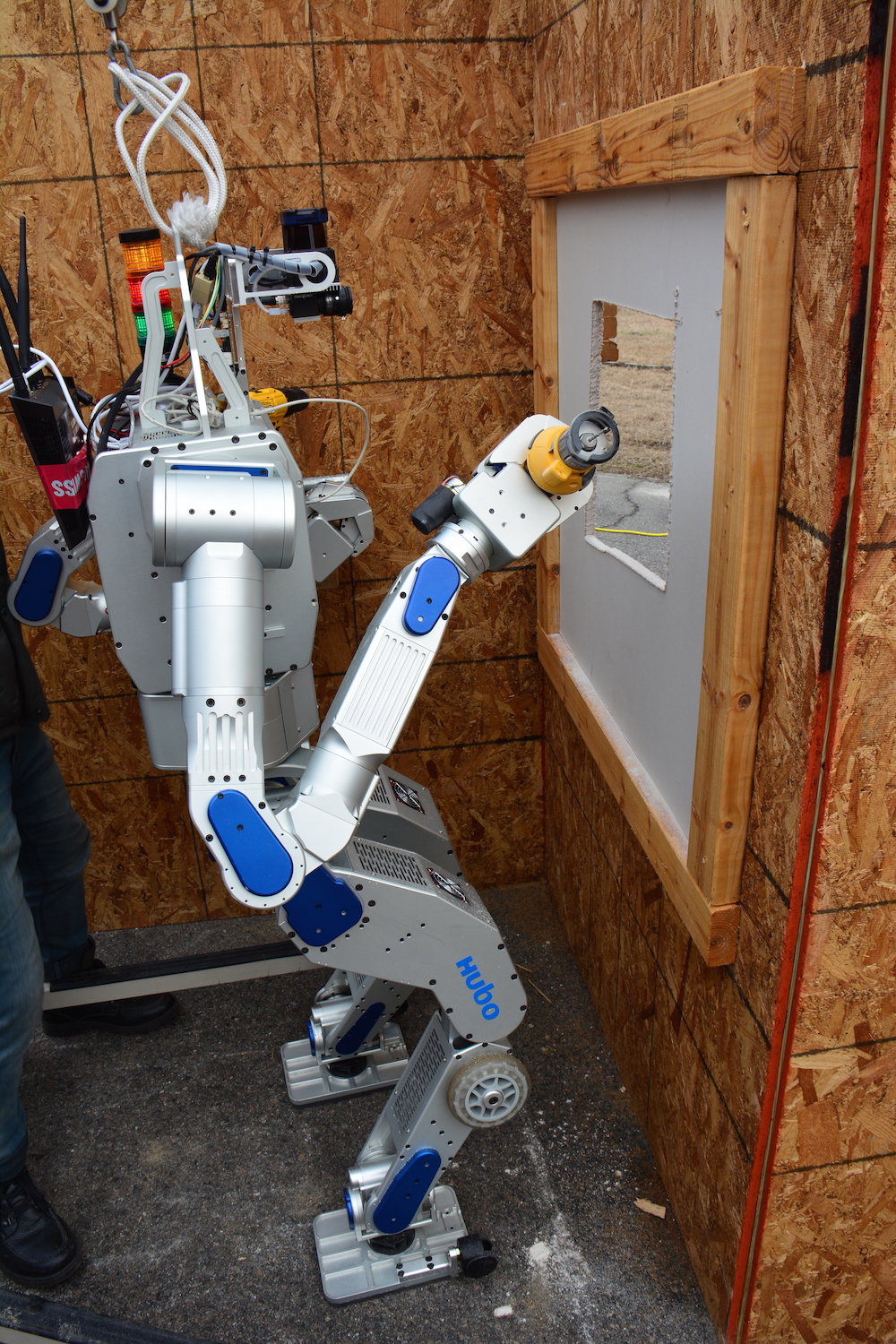
DRC-HUBO فائزًا لأنه كان قادرًا على إكمال جميع المهام الثماني بدون أخطاء في أقصر وقت (44 دقيقة. 28 ثانية). كان أداء الفرق الأخرى جيدًا أيضًا ، لكن الروبوتات الخاصة بهم فقدت الوقت بسبب التأخير. من بين الأفضل فريق Tartan Rescue ، فإن CHIMP الخاص به هو روبوت ذو أرجل ومسارات كاتربيلر ، والذي كان قادرًا على العودة إلى المهام بعد السقوط ؛ مومارومن فريق جامعة بون - سيارة بسيطة وأنيقة على عجلات برأس دوار ويدين ؛ RoboSimian من مختبر الدفع النفاث التابع لناسا ، مع أربع أرجل وحركات تشبه اليوجا ؛ ATLAS من فريق IHMC هو إنسان آلي كهربائي كبير تم تطويره بواسطة Boston Dynamics .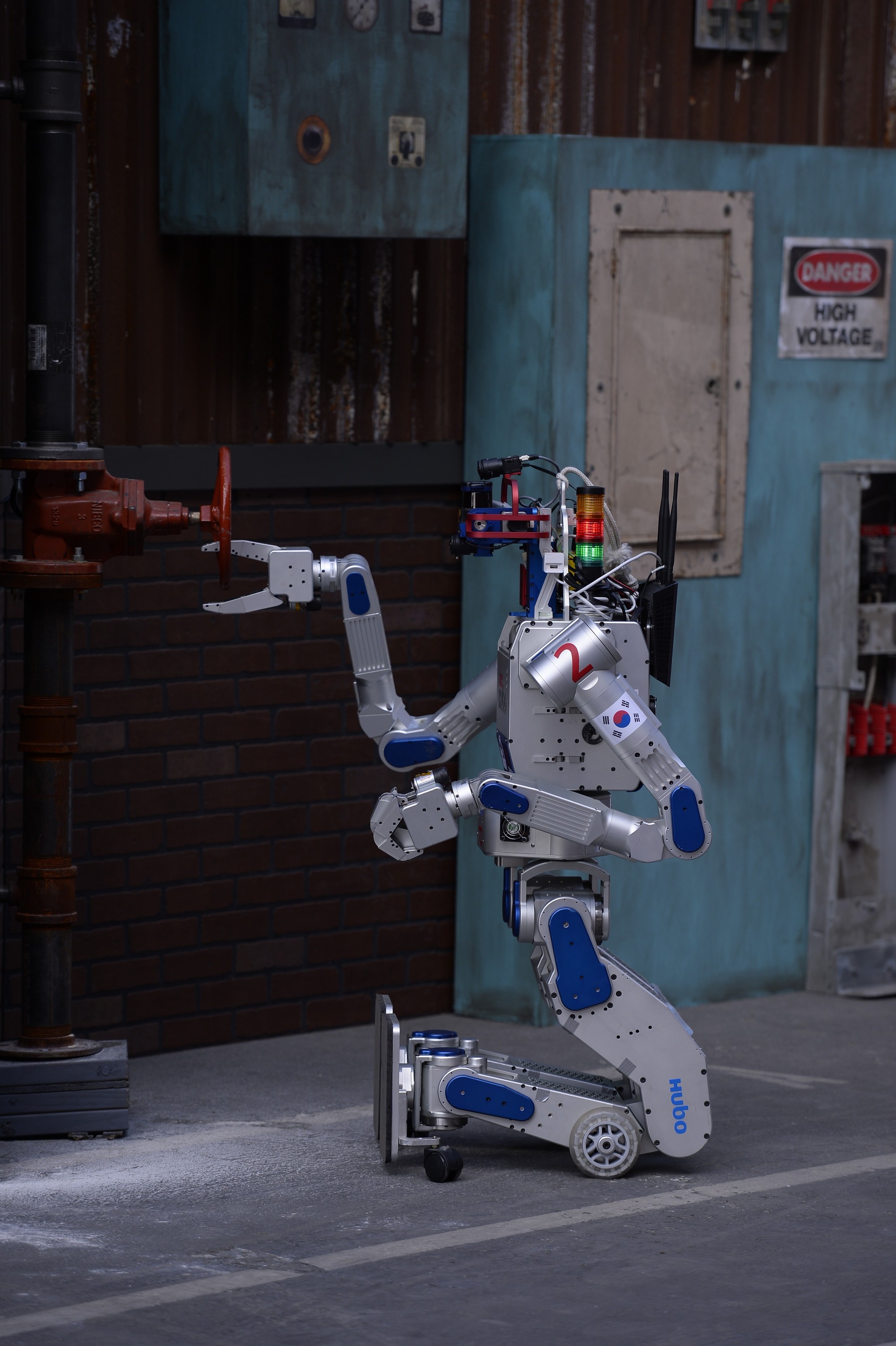 يقوم DRC-HUBO بمهمة إغلاق الصمام. لاحظ أن الجزء العلوي من جسده يدور 180 درجة.
يقوم DRC-HUBO بمهمة إغلاق الصمام. لاحظ أن الجزء العلوي من جسده يدور 180 درجة.وقالت مديرة DARPA ومنظمة جمهورية الكونغو الديمقراطية جيل برات في اجتماع مع الصحفيين الذين علقوا على تصميم الروبوتات إن المرونة هي أهم شيء. "إن الروبوت الذي يمكنه تغيير التكوين من استخدام الأرجل إلى استخدام العجلات يمكن أن يكون له هيكل أكثر تعقيدًا ووزن أكثر ، ولكنه سيمنحك هذه المرونة."
البروفيسور O هو خبير معترف به دوليًا في الروبوتات البشرية. قام هو وطلاب KAIST في Daejeon ، كوريا الجنوبية ، بتحسين منصة HUBO الخاصة بهم لأجيال. فيما يلي مقطع فيديو عمره بالفعل عدة سنوات: ثم شرح الأستاذ O HUBO 2:بالنسبة لنهائيات جمهورية الكونغو الديمقراطية ، قرر تعديل الروبوت بشكل كبير لإعداده للمهام المحتملة. في الفصل الرئيسي بعد المسابقة ، قال الأستاذ O أن DRC-HUBO "لا يختلف ، إنه مجرد إنسان آلي". ولكن في الواقع ، عمل فريقه من KAIST بعناية على كل التفاصيل. وقدر تكلفة كل روبوت بحوالي 500000 دولار ومليون دولار ، وفيما يلي الميزات الرئيسية التي ساعدت DRC-HUBO على التعامل مع المهام:1. العجلات على ركبتيه: DRC-HUBO . . , .
 2. :
2. : ,
SCHAFT — ,
DARPA Google,
DRC-HUBO ( 33, 31 ). ( ) 3-4 , , 30 .
3. التوافق: أراد الفريق أن يجعل الروبوت متوافقًا دون استخدام أجهزة استشعار عزم الدوران وجهاز التحكم التلقائي المعتاد (كانوا يخشون من أن يؤدي ذلك إلى عدم الاستقرار). لذلك ، باستخدام مضخم خاص ، تم نقل مشكلة التوافق إلى برنامج تشغيل المحرك.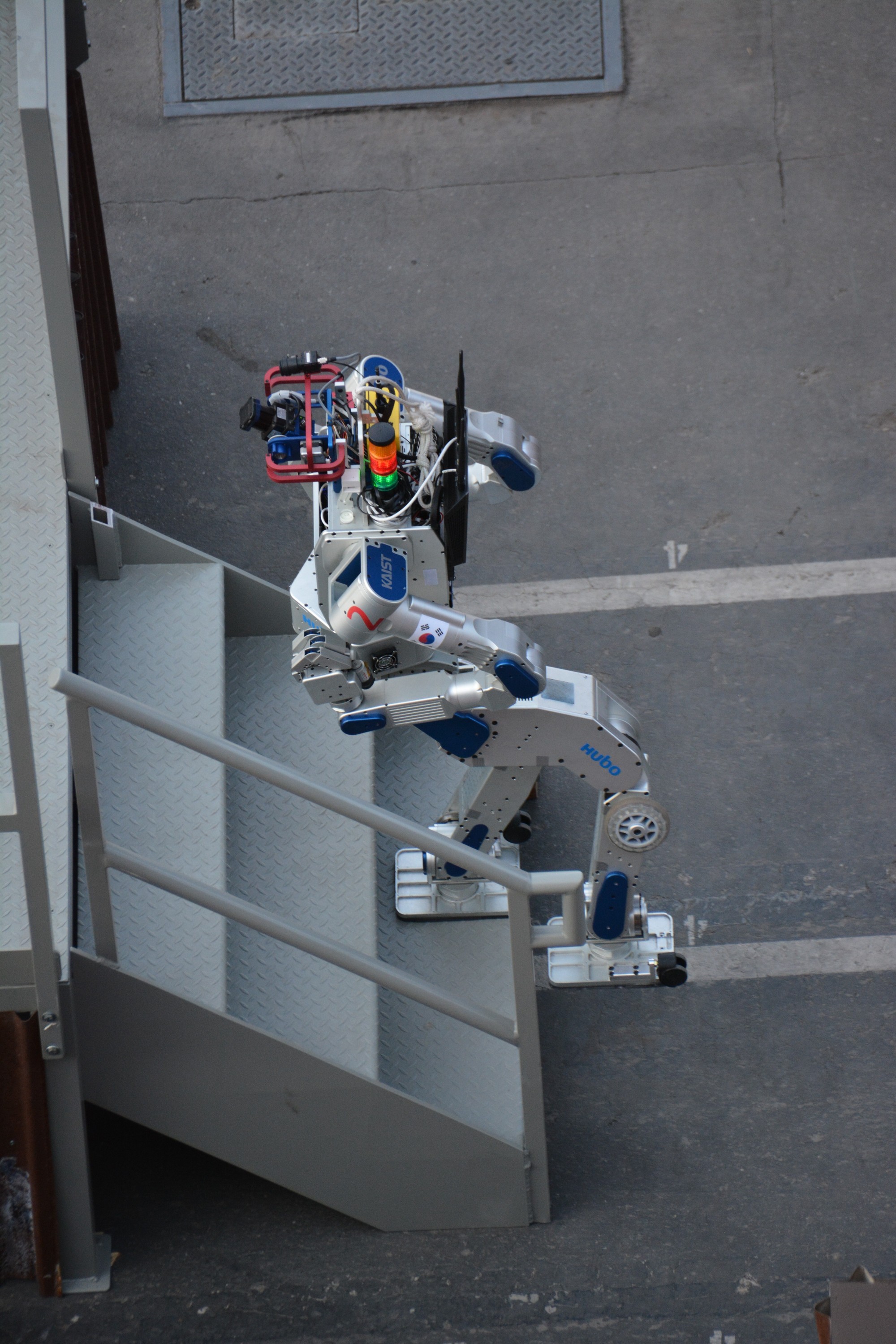 4. الجذع الدوار: يمكن لـ DRC-HUBO تدوير الجزء العلوي من جسمه 180 درجة. هذا يعني أنه يمكن قلب ركب الروبوت في اتجاه واحد ، بينما يمكنه المشاهدة في الاتجاه المعاكس (جربه بنفسك!). هذه القدرة لا تعمل فقط عندما تكون واقفة ، ولكن أيضًا عندما تكون على ركبتيك. استغل الروبوت هذه الفرصة في العديد من المهام عندما كان من الضروري: قيادة سيارة ، ثقب الجدار ، التحرك عبر الأنقاض وتسلق السلالم.5. : KAIST
4. الجذع الدوار: يمكن لـ DRC-HUBO تدوير الجزء العلوي من جسمه 180 درجة. هذا يعني أنه يمكن قلب ركب الروبوت في اتجاه واحد ، بينما يمكنه المشاهدة في الاتجاه المعاكس (جربه بنفسك!). هذه القدرة لا تعمل فقط عندما تكون واقفة ، ولكن أيضًا عندما تكون على ركبتيك. استغل الروبوت هذه الفرصة في العديد من المهام عندما كان من الضروري: قيادة سيارة ، ثقب الجدار ، التحرك عبر الأنقاض وتسلق السلالم.5. : KAIST ,
HUBO 2 , , 7 . , . 15 , « », .
 6. :
6. : , , (
ATLAS, ),
DRC-HUBOلديها نظام رؤية مبسط. يعتمد المشغلون على كاميرا تقليدية معظم الوقت ، بينما يقوم ليدار متصل بمحرك مؤازر بفحص البيئة فقط عند الضرورة. وأشار أحد طلاب معهد KAIST إلى أنه في الواقع ، ليس للروبوت رأس - "عيون فقط" .7. الطاقة: عندما تتطلب المحركات طاقة عالية ، قد لا يتمكن نظام الطاقة الرئيسي من توفير طاقة كافية للمكونات المهمة في الماكينة. ولتجنب ذلك ، استخدم الفريق مكثفًا فائقًا يوفر الطاقة لأجهزة الكمبيوتر وقنوات الإرسال وبعض أجهزة الاستشعار والجيروسكوبات ، حتى في حالة فشل نظام الطاقة الرئيسي.8. برامج خاصة: Xenomai Linux ,
PODO (
KAIST). Gazebo. .
 DRC-HUBO
DRC-HUBO , ,
KAIST ( , ; ):
1. .
تم السماح للفرق بإجراء تعديلات على مركبة Polaris حتى تتمكن الروبوتات من القيادة والخروج بسهولة من السيارة. قام فريق KAIST بتركيب جهاز معدني مع ذراعين في أسفل السيارة ؛ عندما ضغط DRC-HUBO على أحد الروافع ، عمل نظام الكابلات بحيث ضغطت الرافعة الثانية على المعجل. بيده اليسرى ، تمسك الروبوت بسيارة ، ومع يده اليمنى كان يسيطر على العجلة. أكمل هذه المهمة بسرعة كبيرة (استغرقت العملية أكثر من دقيقة بقليل) ، وعلى عكس الفرق الأخرى ، لم يتوقف عن تمرير العقبات.2. مهمة الخروج من المركبة.
كانت هذه واحدة من أصعب المهام. التحضير له ، الأستاذ أوه ، كما أخبرنا ، خرج من السيارة عدة مرات لفهم الحركات وأجزاء الجسم التي يستخدمها لهذا الغرض. وخلص إلى أنه سيلزم "نهج ديناميكي". قام فريقه ببرمجة DRC-HUBO بحيث رفع يديه وتمسك بإطار الآلة. يستخدم الروبوت 100 نيوتن من الجر لكل يد. عندما ترفع الأذرع جسم الروبوت ، فإنها تسقط إلى حد كبير من السيارة ، على الرغم من أن الحركة مسيطر عليها (بفضل "النهج الديناميكي"). انتبه إلى مناوره الرائعة للخروج من السيارة في حوالي الساعة 1:00! أفاد البروفيسور O أنه خلال تطور هذه الحركة احترقت عدة محركات ، ولكن تم حل المشكلة باستخدام أقوى المحركات المصنوعة خصيصًا. في الوقت الحالي ، يمكن أن يخرج الروبوت من السيارة في أقل من 4 دقائق ، وعندما يكون بالفعل على الأرض ، فإنه يجلس على ركبتيه وأوراقه.3. المهمة مع الباب.
على عكس الروبوتات الأخرى التي كان عليها الوقوف (والتوازن على قدمين) لإكمال هذه المهمة ، يمكن لـ DRC-HUBO الركوع عن طريق تدوير مقبض الباب. يستخدم يده الأخرى ببراعة لإبقاء الباب مفتوحًا أثناء تدوير مقبض الباب. في أقل من دقيقتين ، قاد من خلال مدخل.4. المهمة مع الصمام.
لاحظ أنه في بداية الفيديو ، يتحرك الليدار لأعلى ولأسفل للسماح للمشغلين بمسح التضاريس أمام الروبوت. ثم ، عندما يقترب DRC-HUBO من صمام البوابة ، فإنه يدور الجزء العلوي من الجسم 180 درجة. انتبه لحركته في الساعة 0:20 ، لأنك قد لا تلاحظ (زاوية التصوير لا تُظهر الجزء السفلي من جسم الروبوت ، للأسف). في هذا الوضع ، لا يزال على ركبتيه ، يمكن للروبوت رفع الجسم بحيث يكون من الأسهل التحكم في الصمام (لماذا يقف إذا لم يكن ضروريًا؟). يقوم الروبوت بفحص التضاريس باستخدام ليدار ، ويحدد الموقع وبعد 3 دقائق يقوم بالمهمة. يرجى ملاحظة أنه كان مطلوبًا دور واحد فقط ، ولكن DRC-HUBOقام بدورتين كاملتين! في 2:01 ، يمكنك رؤية الروبوت "يعيد" الجذع إلى وضعه الطبيعي.5. المهمة مع الجدار.
كانت هذه مهمة صعبة لمعظم الفرق ، لأن الروبوت كان عليه أن يمسك بالمثقاب والضغط على زر التشغيل / الإيقاف لاستخدام الجهاز. استخدم DRC-HUBO مستشعرات القوة على كل ذراع لالتقاط الأداة بشكل أفضل. يمكنك أن ترى كيف يتحرك الروبوت من تلقاء نفسه وحتى يحرك المثقاب على الرف (يطرق تدريبات أخرى على الطريق) من أجل التقاطه بشكل أفضل. عندما يتمكن الروبوت من الاستيلاء على الأداة ، يظهر المشغلون مكان الثقب ، والباقي يقوم بالباقي. يستخدم 20 نيوتن من قوة الجر ، ويمكنك أن ترى كيف يستخدم جسده لتحريك المثقاب بشكل مثالي في دائرة. يستغرق إكمال المهمة الروبوت 11 دقيقة.6. العمل المفاجئ.
كانت المهمة هي سحب القابس وإدخاله في منفذ آخر. لاحظ كيف يقوم DRC-HUBO بمسح الأرضية ويلاحظ أن التمرين الذي أسقطه سابقًا في طريقه. يدور الروبوت ويدفع الجهاز بركبتيه. ثم يحاول أن يستدير ويبدو أنه اصطدم بجدار. من الواضح أن المشغلين يلاحظون المشكلة ، ويمضي قدماً قليلاً ثم يستطيع أن يستدير. في النهاية ، يقترب الروبوت من الجدار بمقبس مثبت أعلى من صمام البوابة ومقبض الباب. حان الوقت للوصول إلى قدميك ، ويمكنك مشاهدته من حوالي الساعة 3:05. جمهورية الكونغو الديمقراطية- HUBOيأخذ عدة خطوات إلى الأمام وبعد فترة من الوقت لإكمال المهمة. يمسك القابس بالكابل ؛ نعتقد أنه كان مقصودًا حتى يتمكن المشغلون من رؤية القابس بشكل أفضل ولم تحجب ذراع الروبوت ذلك ، مما يجعل المهمة مستحيلة. في الوقت المناسب ، يمكنك رؤية ذلك في حوالي الساعة 7:47 ، حيث يحاول الروبوت إدخال القابس ويفتقد المقبس. بعد عدة حركات تصحيحية ، أكملت المهمة! مرت 13 دقيقة و 30 ثانية - أكثر من إكمال جميع المهام الأخرى.7. مهمة التحرك عبر الأنقاض.
يمكن لـ DRC-HUBO تحريك ركبتيه للأمام أو تدوير الجذع 180 درجة وركوب ساقيه إلى الأمام ، مثل دلو الجرافة. وهذا ما يفعله لإكمال المهمة. يمكنك أن ترى كيف يدور الجسد في 0:28. هذا رائع. يرفع الروبوت يديه لأعلى - ربما حتى لا يتورط في القمامة. ثم يبدأ في التحرك من خلال الأنقاض. يتوقف لثانية واحدة فقط ، عندما يبدو أن قطعة خشب عالقة في كتلة جمرة ، لذا فإنه يستدير قليلاً إلى اليسار لإزالتها من المسار. تحريك الأنبوب البلاستيكي إلى اليمين. في الساعة 4:14 ، يدير جذعه مرة أخرى ويقف أمام الدرجات. تستغرق المهمة أقل من 5 دقائق.8. المهمة مع الخطوات.
قال البروفيسور O إنه بالنسبة للعديد من المهام ، خاصة تسلق السلالم ، من المهم أن يتمكن الروبوت من رؤية ساقيه. بالكاد تستطيع الروبوتات الكبيرة مثل ATLAS القيام بذلك ، فهي تحتاج إلى ثني الجسم ، مما يجعل التوازن أكثر صعوبة. جمهورية الكونغو الديمقراطية- HUBOيحل هذه المشكلة بطريقة ذكية للغاية. يصعد الدرج للخلف! وبالتالي ، فإن ركبتيه لا تسدان الكاميرات ويمكنك رؤية الساقين والأرض. ولكن كيف يرى ساقيه إذا قام إلى الوراء؟ تحويل الجذع بالطبع! يمكنك رؤية العملية برمتها ، بدءًا من 0:26. يركع الروبوت أمام الدرج ، ثم يدير ظهره فجأة. ثم يستيقظ ، وعند 0:55 سترى كيف أدار الجذع 180 درجة. الآن يمكنه مسح الخطوات والبدء في التسلق. لكن لاحظ أنه قبل ذلك يأخذ خطوتين إلى الجانب ، إلى اليسار (1:45)! بعد دقيقتين - التي بدت وكأنها أبدية للجمهور - بدأ الروبوت أخيرًا في الارتفاع ، وكسر الخطوات الثلاث الأخيرة واحدة تلو الأخرى. بوضوح! في أقل من 7 دقائق DRC-HUBOتقف على المنصة. لا يوجد صوت في الفيديو ، ولكن في تلك اللحظة انفجر الفريق والجمهور بالتصفيق.قام KAIST بعمل أربع نسخ من DRC-HUBO وتمرن بدون كابلات أمان لأكثر من شهر قبل المنافسة. تدربوا في الشارع ، في ساحة انتظار سيارات ذات سطح غير مستوٍ وفي ظروف جوية مختلفة ، بما في ذلك أشعة الشمس القوية والرياح. وقال البروفيسور أو في ورشة العمل بعد المنافسة "إذا لم نقم بإزالة كابلات الأمان ، فسيخشى المشغلون".وأضاف أنه أثناء التدريب ، قاموا بجميع المهام في كلا الوضعين - الوقوف والركبتين (كان متوسط الوقت 30 دقيقة). كان الفريق جيدًا في إزالة الأنقاض بأيدي DRC-HUBO ، والتي لم يتمكنوا من إظهارها في نهائيات جمهورية الكونغو الديمقراطية ، وكان بإمكانهم أيضًا أداء المهام على سطح أكثر صعوبة مما كان عليه في المسابقة., … ! - , .