V-REP - منصة Robomodelling مرنة وقابلة للتطوير
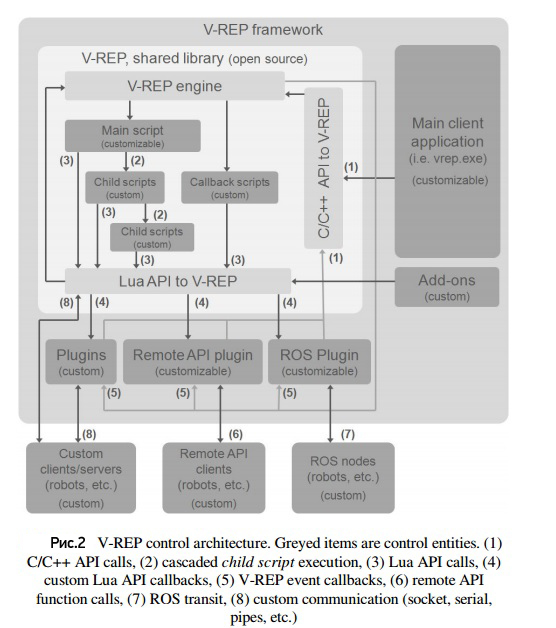
 لقد صادفت مؤخرًا مقالة مسلية على منصة عرض robomodel باللغة الإنجليزية. وبما أنني أمثل حديقة تكنولوجيا الروبوتات في Navigator ، وأنشطتنا ترتبط إلى حد كبير بالنمذجة ، والروبوتات والإلكترونيات ، اعتقدت أنه سيكون من الرائع جدًا ترجمة هذه المقالة وإحضارها إلى الجماهير. آمل أن تكون الترجمة مفيدة.بالمناسبة ، كان هناك بالفعل منشور حول موضوع robosimulator V-REP ، لذلك أوصي بقراءته.اليوم ، إمكانيات استخدام الروبوتات ضخمة ، يتم استخدام الروبوتات في كل مكان ، من استكشاف الكواكب إلى تنظيف المنازل. إن الجمع بين ثلاثة أنظمة فرعية في الروبوتات: المشغل والمستشعر والتحكم يجعلها فعالة في العالم الحقيقي ، ولكنه يعقد المحاكاة الافتراضية. في هذه المقالة نريد أن نقدم لك إطار عمل لمحاكاة الأنظمة الآلية - V-REP.المقدمةأدى النمو الهائل في قوة الحوسبة لأجهزة الكمبيوتر (ناهيك عن الأجهزة للرسومات ثلاثية الأبعاد) ، إلى جانب ظهور عدد كبير من البرامج مفتوحة المصدر والإلكترونيات ، إلى تغيير كبير في أنظمة المحاكاة الافتراضية ثلاثية الأبعاد للروبوتات. كانت هناك فرصة ليس فقط لتعقيد بيئة العمل ، ولكن أيضًا لضمان إطلاق أنظمة الروبوتات المادية في الوقت الحقيقي ، بالإضافة إلى تضمينها في أنظمة محاكاة المحمول / المدمجة التي يتم التحكم فيها مباشرة من البيئة.من حيث المبدأ ، من الممكن تجميع المحاكي بشكل مستقل من المكتبات الحركية والفيزيائية والجرافيكية المختلفة ، وستكون الهندسة والمنهجية المستخدمة ذات أهمية حاسمة من حيث أداء المحاكاة ودقتها. يتطلب النهج المنهجي القوي استخدام استراتيجيات النمذجة العالمية والقابلة للتطوير.في الواقع ، الهدف الرئيسي من المحاكاة هو توفير عدد كبير من الأدوات والقدرات للمحاكاة. هناك صعوبات في هذا ، لأن تنوع الأنظمة الروبوتية لا يسمح لنا بتوقع تفاصيل جهاز المحاكاة. بالإضافة إلى ذلك ، يحتاج بعض المستخدمين إلى نهج مرن يجعل من الممكن العمل بلغة برمجة بسيطة ، بالإضافة إلى جعل جهاز المحاكاة محمولًا ومناسبًا لجميع أنواع نماذج الروبوت ، والأهم من ذلك أنه قابل للتطوير.تتوفر حاليًا العديد من منصات النمذجة ، مثل Open HRP أو Gazebo أو Webots. على الرغم من حقيقة أن هذه الأنظمة الأساسية توفر وظائف كافية ، إلا أنها لا تستطيع تقديم مجموعة واسعة من إمكانيات وتقنيات البرمجة المتكاملة. إن نماذج المحاكاة وأجهزة التحكم الخاصة بهم محمولة جزئيًا فقط ، ولديهم مشاكل مختلفة وبالتالي تتطلب معالجة منفصلة. على سبيل المثال ، غالبًا ما يكون من الضروري إعادة ترجمة الشفرة إلى منصات الأجهزة المختلفة ، أو قد يكون من الضروري احتواء النموذج المحاكي ووحدة التحكم بعناية من ملفين مختلفين ، أو تحتاج إلى دعم قابلية التوسع ، ويتم ذلك من خلال خوارزميات مشفرة غير معروفة.محاكي V-REP هو نتيجة محاولات لتلبية جميع متطلبات تنوع بيئة النمذجة وقابليتها للتوسع. إلى جانب مناهج النمذجة التقليدية التي تمتلكها أجهزة المحاكاة الأخرى ، يضيف V-REP العديد من الأساليب الإضافية. أيضًا في هذا الجزء من المقالة ، سننظر في بنية التحكم V-REP ، وهي تقنية النصوص البرمجية المضمنة التي تحل محل أنواع مختلفة من وحدات التحكم في نموذج المحاكاة ، مما يجعل هذه النماذج محمولة للغاية وقابلة للتطوير.في الجزء الثاني من المقالة ، سننظر ، بشكل عام ، في وظيفة نظام النمذجة ودمجها في نماذج المحاكاة. أيضا ، كمثال ، سيتم النظر في ثلاثة نماذج محاكاة عملية تم إنشاؤها في V-REP وتنفيذها.عندما تكون هناك حاجة لبناء مشاهد معقدة ، فليس هناك خيار أفضل من استخدام نظام تحكم موزع. يعمل هذا النهج على تبسيط المهمة من خلال فصل إدارة الموضوعات ، وتسريع النمذجة ، وتوزيع حمل المعالج عبر العديد من النوى أو عدة أجهزة ، وهذا يسمح لك بالتحكم في تنفيذ الخوارزميات. ومع ذلك ، هناك متطلبات النمذجة التي لا يجب نسيانها لتحقيق هذا الهدف.نظرة عامة على تقنيات إدارة المحاكاة.يتم تنفيذ رمز محاكاة التحكم باستخدام الطرق الثلاث التالية:1. يتم تنفيذ رمز التحكم على جهاز آخر.يمكن تنفيذ الكود على جهاز منفصل أو روبوت متصل بمحاكي الجهاز من خلال ناقل محدد (على سبيل المثال ، موصل ، منفذ تسلسلي ، إلخ). الميزة الرئيسية لهذا النهج هي أصالة وحدة التحكم (رمز التحكم أصلي وسيعمل على المعدات الأصلية). ميزة أخرى هي انخفاض العبء الحسابي على محاكاة الجهاز. ومع ذلك ، يفرض هذا النهج قيودًا خطيرة على التزامن مع دورة المحاكاة.2. يتم تنفيذ رمز التحكم على نفس الجهاز ، ولكن في عملية (أو خيط آخر) يختلف عن دورة المحاكاة.باستخدام هذه الطريقة ، يمكننا أيضًا استخدام حمل متوازن ومخفض على نوى المعالج ، ولكن هذا سيرافقه نقص في المزامنة مع دورة المحاكاة. في معظم الوقت ، سيتم إقران هذه العملية مع تأخر الاتصال أو تأخير التأخير. غالبًا ما يتم تنفيذ هذه الطريقة من خلال برامج أو مكونات خارجية قابلة للتنفيذ يتم تحميلها في المحاكي.3. يتم تنفيذ رمز التحكم على نفس الجهاز وفي نفس الخيط مثل دورة المحاكاة.الميزة الرئيسية لهذا النهج هي التزامن مع دورة المحاكاة ، وغياب أي تأخير. ومع ذلك ، تصبح هذه الطريقة ممكنة فقط مع زيادة الحمل الحسابي على المعالج. غالبًا ما يتم تنفيذ هذه الطريقة من خلال المكونات الإضافية التي تم تحميلها في المحاكي.تتمثل العيوب الأكثر شيوعًا للطرق المذكورة أعلاه في سهولة النقل وضعف القياس في نماذج المحاكاة: نظرًا لأن رمز التحكم غير مرتبط بنموذج المحاكاة المقابل ، يجب توزيعه وتجميعه وتثبيته بشكل منفصل. يؤدي هذا إلى زيادة عدد مشاكل التوافق على الأنظمة الأساسية المختلفة ، بالإضافة إلى عدد التعارضات مع المكتبات الأخرى. يتم تقليل المرونة أيضًا لأنك تحتاج إلى إعادة ترجمة الملف القابل للتنفيذ وإعادة تحميله لكل رمز تعديل صغير. سيتم دعم نسخة من النموذج ، كما هو الحال في النمذجة متعددة الروبوتات ، بواسطة آليات سلكية تطلق عناصر تحكم جديدة لكل مثيل من نموذج المحاكاة.تنفيذ V-REP .يسمح V-REP للمستخدم باستخدام عدة إمكانيات للنمذجة: (الجدول 1 والشكل 2)
لقد صادفت مؤخرًا مقالة مسلية على منصة عرض robomodel باللغة الإنجليزية. وبما أنني أمثل حديقة تكنولوجيا الروبوتات في Navigator ، وأنشطتنا ترتبط إلى حد كبير بالنمذجة ، والروبوتات والإلكترونيات ، اعتقدت أنه سيكون من الرائع جدًا ترجمة هذه المقالة وإحضارها إلى الجماهير. آمل أن تكون الترجمة مفيدة.بالمناسبة ، كان هناك بالفعل منشور حول موضوع robosimulator V-REP ، لذلك أوصي بقراءته.اليوم ، إمكانيات استخدام الروبوتات ضخمة ، يتم استخدام الروبوتات في كل مكان ، من استكشاف الكواكب إلى تنظيف المنازل. إن الجمع بين ثلاثة أنظمة فرعية في الروبوتات: المشغل والمستشعر والتحكم يجعلها فعالة في العالم الحقيقي ، ولكنه يعقد المحاكاة الافتراضية. في هذه المقالة نريد أن نقدم لك إطار عمل لمحاكاة الأنظمة الآلية - V-REP.المقدمةأدى النمو الهائل في قوة الحوسبة لأجهزة الكمبيوتر (ناهيك عن الأجهزة للرسومات ثلاثية الأبعاد) ، إلى جانب ظهور عدد كبير من البرامج مفتوحة المصدر والإلكترونيات ، إلى تغيير كبير في أنظمة المحاكاة الافتراضية ثلاثية الأبعاد للروبوتات. كانت هناك فرصة ليس فقط لتعقيد بيئة العمل ، ولكن أيضًا لضمان إطلاق أنظمة الروبوتات المادية في الوقت الحقيقي ، بالإضافة إلى تضمينها في أنظمة محاكاة المحمول / المدمجة التي يتم التحكم فيها مباشرة من البيئة.من حيث المبدأ ، من الممكن تجميع المحاكي بشكل مستقل من المكتبات الحركية والفيزيائية والجرافيكية المختلفة ، وستكون الهندسة والمنهجية المستخدمة ذات أهمية حاسمة من حيث أداء المحاكاة ودقتها. يتطلب النهج المنهجي القوي استخدام استراتيجيات النمذجة العالمية والقابلة للتطوير.في الواقع ، الهدف الرئيسي من المحاكاة هو توفير عدد كبير من الأدوات والقدرات للمحاكاة. هناك صعوبات في هذا ، لأن تنوع الأنظمة الروبوتية لا يسمح لنا بتوقع تفاصيل جهاز المحاكاة. بالإضافة إلى ذلك ، يحتاج بعض المستخدمين إلى نهج مرن يجعل من الممكن العمل بلغة برمجة بسيطة ، بالإضافة إلى جعل جهاز المحاكاة محمولًا ومناسبًا لجميع أنواع نماذج الروبوت ، والأهم من ذلك أنه قابل للتطوير.تتوفر حاليًا العديد من منصات النمذجة ، مثل Open HRP أو Gazebo أو Webots. على الرغم من حقيقة أن هذه الأنظمة الأساسية توفر وظائف كافية ، إلا أنها لا تستطيع تقديم مجموعة واسعة من إمكانيات وتقنيات البرمجة المتكاملة. إن نماذج المحاكاة وأجهزة التحكم الخاصة بهم محمولة جزئيًا فقط ، ولديهم مشاكل مختلفة وبالتالي تتطلب معالجة منفصلة. على سبيل المثال ، غالبًا ما يكون من الضروري إعادة ترجمة الشفرة إلى منصات الأجهزة المختلفة ، أو قد يكون من الضروري احتواء النموذج المحاكي ووحدة التحكم بعناية من ملفين مختلفين ، أو تحتاج إلى دعم قابلية التوسع ، ويتم ذلك من خلال خوارزميات مشفرة غير معروفة.محاكي V-REP هو نتيجة محاولات لتلبية جميع متطلبات تنوع بيئة النمذجة وقابليتها للتوسع. إلى جانب مناهج النمذجة التقليدية التي تمتلكها أجهزة المحاكاة الأخرى ، يضيف V-REP العديد من الأساليب الإضافية. أيضًا في هذا الجزء من المقالة ، سننظر في بنية التحكم V-REP ، وهي تقنية النصوص البرمجية المضمنة التي تحل محل أنواع مختلفة من وحدات التحكم في نموذج المحاكاة ، مما يجعل هذه النماذج محمولة للغاية وقابلة للتطوير.في الجزء الثاني من المقالة ، سننظر ، بشكل عام ، في وظيفة نظام النمذجة ودمجها في نماذج المحاكاة. أيضا ، كمثال ، سيتم النظر في ثلاثة نماذج محاكاة عملية تم إنشاؤها في V-REP وتنفيذها.عندما تكون هناك حاجة لبناء مشاهد معقدة ، فليس هناك خيار أفضل من استخدام نظام تحكم موزع. يعمل هذا النهج على تبسيط المهمة من خلال فصل إدارة الموضوعات ، وتسريع النمذجة ، وتوزيع حمل المعالج عبر العديد من النوى أو عدة أجهزة ، وهذا يسمح لك بالتحكم في تنفيذ الخوارزميات. ومع ذلك ، هناك متطلبات النمذجة التي لا يجب نسيانها لتحقيق هذا الهدف.نظرة عامة على تقنيات إدارة المحاكاة.يتم تنفيذ رمز محاكاة التحكم باستخدام الطرق الثلاث التالية:1. يتم تنفيذ رمز التحكم على جهاز آخر.يمكن تنفيذ الكود على جهاز منفصل أو روبوت متصل بمحاكي الجهاز من خلال ناقل محدد (على سبيل المثال ، موصل ، منفذ تسلسلي ، إلخ). الميزة الرئيسية لهذا النهج هي أصالة وحدة التحكم (رمز التحكم أصلي وسيعمل على المعدات الأصلية). ميزة أخرى هي انخفاض العبء الحسابي على محاكاة الجهاز. ومع ذلك ، يفرض هذا النهج قيودًا خطيرة على التزامن مع دورة المحاكاة.2. يتم تنفيذ رمز التحكم على نفس الجهاز ، ولكن في عملية (أو خيط آخر) يختلف عن دورة المحاكاة.باستخدام هذه الطريقة ، يمكننا أيضًا استخدام حمل متوازن ومخفض على نوى المعالج ، ولكن هذا سيرافقه نقص في المزامنة مع دورة المحاكاة. في معظم الوقت ، سيتم إقران هذه العملية مع تأخر الاتصال أو تأخير التأخير. غالبًا ما يتم تنفيذ هذه الطريقة من خلال برامج أو مكونات خارجية قابلة للتنفيذ يتم تحميلها في المحاكي.3. يتم تنفيذ رمز التحكم على نفس الجهاز وفي نفس الخيط مثل دورة المحاكاة.الميزة الرئيسية لهذا النهج هي التزامن مع دورة المحاكاة ، وغياب أي تأخير. ومع ذلك ، تصبح هذه الطريقة ممكنة فقط مع زيادة الحمل الحسابي على المعالج. غالبًا ما يتم تنفيذ هذه الطريقة من خلال المكونات الإضافية التي تم تحميلها في المحاكي.تتمثل العيوب الأكثر شيوعًا للطرق المذكورة أعلاه في سهولة النقل وضعف القياس في نماذج المحاكاة: نظرًا لأن رمز التحكم غير مرتبط بنموذج المحاكاة المقابل ، يجب توزيعه وتجميعه وتثبيته بشكل منفصل. يؤدي هذا إلى زيادة عدد مشاكل التوافق على الأنظمة الأساسية المختلفة ، بالإضافة إلى عدد التعارضات مع المكتبات الأخرى. يتم تقليل المرونة أيضًا لأنك تحتاج إلى إعادة ترجمة الملف القابل للتنفيذ وإعادة تحميله لكل رمز تعديل صغير. سيتم دعم نسخة من النموذج ، كما هو الحال في النمذجة متعددة الروبوتات ، بواسطة آليات سلكية تطلق عناصر تحكم جديدة لكل مثيل من نموذج المحاكاة.تنفيذ V-REP .يسمح V-REP للمستخدم باستخدام عدة إمكانيات للنمذجة: (الجدول 1 والشكل 2)
البرامج النصية المدمجة هذه
هي أقوى ميزة مميزة لـ V-REP. حلقة محاكاة البرنامج النصي الرئيسي لوا ( “ ”) — . , . . , , . , . : , , , , . . 3 II.
, , V-rep lua. ( /), ( ).
V-REP . lua, . . /, . API , ROS (. . ) .
API
API V-REP V-REP . API API . (C/C++, Python, Java, Matlab & Urbi) , , , . , : API , . ( ), ( , / ). API, , , ROS .
ROS
V-REP ROS , ROS V-REP ROS , ROD /. / , .
: marc@coppeliarobotics.com
, ,
, ,
, Coppelia Robotics, .
: , , . .
Source: https://habr.com/ru/post/ar383009/
All Articles