الشتاء في خطوط العرض الشمالية هو الوقت الذي يكون فيه طيار FPV لديه الوقت لأخذ استراحة من السباق والانهيارات المستمرة ، والتقاط مكواة لحام ، وصياغة شيء مفيد لهوايته.نظرًا لأن الجو بارد في الخارج ، فسوف ندرب مهارات التجريب على أجهزة المحاكاة. للقيام بذلك ، تحتاج إلى توصيل جهاز الراديو الخاص بك بالكمبيوتر من خلال محول خاص ، والذي يحول إشارة PPM من جهاز التحكم عن بعد إلى إشارات عصا التحكم USB التي يفهمها الكمبيوتر. هذه المحولات ، بطبيعة الحال ، ليست غير شائعة وتكلف فلسا واحدا في المتاجر الصينية. ومع ذلك ، فإن تسليم الطلب طويل الانتظار ، وهل سيعمل كما توقعنا؟ على سبيل المثال ، لدي هذا:لسبب ما لم أفهمه بعد ، يرفض بشكل قاطع المعايرة بشكل كاف في محاكي FPV Freerider ، على الرغم من أنه يعمل بشكل رائع في Phoenix RC و Aerofly RC 7. ينقل FPV Freerider بشكل جيد فيزياء الرحلة الجوية على مروحية سباق ، وإلى جانب لديه وضع تجريبي مجاني.محلولة - نصنع المحول بأنفسنا!القليل من المعدات:
تحتوي معظم معدات RC الأكثر أو الأقل خطورة على موصل حيث تقوم بإخراج إشارات التحكم بتنسيق PPM (تعديل موضع النبض). إشارة PPM هي سلسلة من النبضات القصيرة ، ويحدد الفاصل الزمني بينها قيمة التحكم لكل من قنوات المعدات الراديوية.جوهر PPM ينقل الصورة بشكل مثالي:لفك شفرة PPM ، تحتاج إلى قياس الفترات الزمنية بين النبضات المتتالية بدقة (لا يهم بين الحواف: الأمامية أو الخلفية ، لأن مدة النبضات نفسها دائمًا).التنفيذ:
إلهام Pocherpnuv من المادة AlexeyStn إنشاء PPM-إلى-USB محول STM32F3Discovery مقرها، ولكن وجود فقط اردوينو برو مايكرو (ليوناردو) مع دعم الأجهزة لUSB، طريقة بسيطة لبدء المحول.يمكنك العثور على العديد من المشاريع المماثلة على github ، وبعضها لا يتطلب حتى أجهزة USB في وحدة التحكم. ومع ذلك ، يحتاج معظمهم إلى الانتهاء بجدية بملف للحصول على شيء يعمل. كان المشروع المناسب هو rc-leonardo-joy، الذي بدأ في العمل على الفور تقريبًا بعد ملء الرسم ، لكنه أظهر على الفور بعض العيوب: جميع قراءات عصا التحكم لم تكن مستقرة جدًا - رقص المؤشر في لوحة التحكم طوال الوقت حول نقطة التحديد. لا أستطيع أن أقول أن هذا أثر بشكل كبير على المعالجة في المحاكي ، لكننا نريد التدريب على معدات جيدة!حسنًا ، نتسلق الشفرة ونرى: يتم حساب عرض نبضة PPM عن طريق معالجة مقاطعة خارجية وقياس الفترات الفاصلة بين المكالمات إلى وظيفة المايكرو () :void rxInt(void) {
uint16_t now,diff;
static uint16_t last = 0;
static uint8_t chan = 0;
now = micros();
sei();
diff = now - last;
last = now;
if(diff>3000) chan = 0;
else {
if(900<diff && diff<2200 && chan<RC_CHANS ) {
rcValue[chan] = adjust(diff,chan);
}
chan++;
}
}
اقرأ عن وظيفة المايكرو () في وثائق اردوينو:إرجاع عدد الميكروثانية منذ أن بدأ مجلس Arduino في تشغيل البرنامج الحالي. سيزيد هذا الرقم (يعود إلى الصفر) ، بعد 70 دقيقة تقريبًا. على لوحات اردوينو 16 ميجاهرتز (مثل Duemilanove و Nano) ، هذه الوظيفة لها دقة أربعة ميكروثانية (أي أن القيمة المعادة هي دائمًا مضاعفة لأربعة). على لوحات 8 MHz Arduino (مثل LilyPad) ، تحتوي هذه الوظيفة على دقة تبلغ ثمانية ميكروثانية.
أي أن الوظيفة ليست دقيقة بشكل خاص فقط وتعرض دائمًا قيمًا مضاعفة لـ 4 μs ، ولكنها أيضًا تفيض بعد 70 دقيقة ، مما يمنحنا نوعًا من القيمة المنحنية للفاصل المقاس. ليس جيد سيكون من الأفضل استخدام مؤقت ومقاطعه لالتقاط الإشارات الخارجية.ننظر إلى أبعد من ذلك: تقتصر معظم البيانات على موضع عصا التحكم بشكل مصطنع على بايت واحد (0-255):
byte stickValue(int rcVal) {
return map( constrain(rcVal - 1000, 0, 1000), 0, 1000, 0, 255);
}
حسنًا ، أود أن أكون أكثر دقة. ولكن لهذا ، سيكون عليك إعادة كتابة واصف HID وتصحيح جميع أنواع البيانات ذات الصلة.لم يقل من فعله.نقوم بتخزين المستودع ، ونعيد كتابة الرمز لاستخدام جهاز توقيت لحساب فترات PPM:void initTimer(void) {
TCCR1A = 0;
TCCR1B = (0<<ICNC1) | (1<<ICES1) | (1<<CS11);
TCCR1C = 0;
TIFR1 = (1<<ICF1);
TIMSK1 = (1<<ICIE1);
}
...
ISR(TIMER1_CAPT_vect) {
union twoBytes {
uint16_t word;
uint8_t byte[2];
} timeValue;
uint16_t now, diff;
static uint16_t last = 0;
static uint8_t chan = 0;
timeValue.byte[0] = ICR1L;
timeValue.byte[1] = ICR1H;
now = timeValue.word;
diff = now - last;
last = now;
if(diff > (NEWFRAME_PULSE_WIDTH * TIMER_COUNT_DIVIDER)) {
chan = 0;
}
else {
if(diff > (MIN_PULSE_WIDTH * TIMER_COUNT_DIVIDER - THRESHOLD)
&& diff < (MAX_PULSE_WIDTH * TIMER_COUNT_DIVIDER + THRESHOLD)
&& chan < RC_CHANNELS_COUNT)
{
rcValue[chan] = adjust(diff, chan);
}
chan++;
}
}
قم بزيادة فترات انحراف العصا إلى 0-1000 في واصف HID:
0x05, 0x01,
0x09, 0x04,
0xa1, 0x01,
0x85, JOYSTICK_REPORT_ID,
...
0xA1, 0x00,
0x09, 0x30,
0x09, 0x31,
0x09, 0x33,
0x09, 0x34,
0x15, 0x00,
0x26, 0xE8, 0x03,
0x75, 0x10,
0x95, 0x04,
0x81, 0x02,
0xc0,
0xc0
على طول الطريق ، قم بتغيير uint8_t إلى uint16_t أينما يتم إرسال قيم انحراف العصا.نزيل الكود الإضافي ، ونضيف دستة # تعريف ونحصل على رسم جيد ، شحذ للعمل كمحول PPM-USB.النتيجة متاحة في github: github.com/voroshkov/Leonardo-USB-RC-Adapterإعدادات الرسم:
من المنطقي إزالة تعريف فوتابا إذا كان لديك أجهزة أخرى:#define FUTABA
وإذا لزم الأمر ، قم بتعديل قيم الميكروثانية في المعلمات إذا كانت المعدات الخاصة بك تنتج أوقات أخرى:#define STICK_HALFWAY 500
#define STICK_CENTER 1500
#define THRESHOLD 100
التجميع:
لتجميع الرسم وتحميله ، تحتاج إلى استبدال مكتبات USB في بيئة Arduino نفسها ، بعد عمل نسخ احتياطية.للقيام بذلك ، نذهب إلى أحشاء Arduino على طول المسار ... \ Arduino \ hardware \ arduino \ cores \ arduino \ ، النسخ الاحتياطي usbapi.h و hid.cpp ، وبعد ذلك نستبدلها بنفس الملفات من مجلد ArduinoLibs في المستودع. بعد ذلك ، افتح الرسم ، وقم بتوصيل Arduino Leonardo واملأه.اتصال:
كل شيء بسيط بشكل قبيح: من ناحية ، نقوم بإدخال USB ، من ناحية أخرى ، نقوم بلحام سلكين (على الرقم 4 الرقمي والأرضي) ونلصقه في PPM لجهاز الإرسال والأرض ، على التوالي. اتضح بطريقة أو بأخرى مثل هذا:في Windows 7 ، يتم التعرف على الجهاز على أنه مركب (لوحة المفاتيح والماوس وعصا التحكم) باسم Arduino Leonardo.إشارة خاصة تستحق موصل في المعدات. إنه في مكان ما مقبس صوت عادي ، وفي مكان ما (كما هو الحال في Futaba 7C) ، هناك شيء أكثر صعوبة:لتجميع موصلات "ذكر" مختلفة ، لطالما استخدمت بنجاح الغراء الساخن. للقيام بذلك ، نضع ورقًا أو بولي إيثيلين على "الأم" ، ونخترق هذه الركيزة بالدبابيس بحيث تلتصق بالموصل على الجانب الآخر ، ثم تصب تدريجيًا الغراء بين الدبابيس ، مما يمنحها الشكل بأصابع مبللة في نفس الوقت. بالطبع ، يجب لحام الأسلاك مقدمًا حتى لا تذوب المادة اللاصقة المعالجة عند اللحام. لم يكن دائمًا جماليًا ، ولكنه عملي للغاية:(هنا ، في الموصل ، هناك حاجة إلى 4 دبابيس لتحديد المواقع بشكل لا لبس فيه ، هناك عاملان فقط.)هذا كل شيء. نقوم بتنزيل جهاز المحاكاة ، وربط المعدات وتدريب المهارات التجريبية أثناء شرب الشاي الساخن أمام الموقد في أمسيات الشتاء القاتمة.ملاحظة
ماذا لو لم يكن هناك اردوينو ليوناردو ، ولكن هناك مثل هذا الحد الأدنى من مجلس التنمية على STM32F103C8T6؟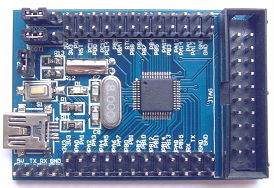 لا تقلق ، على طول الطريق. بالنسبة لك ، وكذلك من أجل تطوري الخاص ، قمت بنقل مشروع Alexey Stankevich المذكور بالفعل .يمكن العثور على مصادر وثنائيات مجمعة للتحميل إلى وحدة التحكم هنا: github.com/voroshkov/STM32-RC-USB-Adapter .سأجيب على جميع الأسئلة بسرور في التعليقات.رحلة سعيدة!
لا تقلق ، على طول الطريق. بالنسبة لك ، وكذلك من أجل تطوري الخاص ، قمت بنقل مشروع Alexey Stankevich المذكور بالفعل .يمكن العثور على مصادر وثنائيات مجمعة للتحميل إلى وحدة التحكم هنا: github.com/voroshkov/STM32-RC-USB-Adapter .سأجيب على جميع الأسئلة بسرور في التعليقات.رحلة سعيدة!