روبوت خشبي يمكنه لعب الشطرنج
ربما رأيت الكثير من المشاريع القائمة على أردوينو والتي تمت إدارتها من خلال نوع من الهواتف الذكية. كانت مثل هذه المشاريع ، كقاعدة عامة ، مثل هذا: جهاز مزود بوحدة بلوتوث مدرجة فيه ، يتم إرسال الأوامر إليه من محاكي عصا التحكم على الهاتف (أو شيء من هذا القبيل). تم صنع العديد من هذه الأدوات ، وذهلت هذه الفكرة إلى ذهني. ولكن ماذا لو ساعدك Arduino في التخلي عن هاتفك الذكي لفترة من الوقت ، ولكن في نفس الوقت استمر في تشغيله؟ وهكذا ولد مشروع روبوت الشطرنج ، الذي تتركز فيه "أدمغته" و "عيونه" في هاتف Android الذكي. مزيد من التفاصيل - تحت القطع.نظرة عامة
-هذه التركيبة كلها عبارة عن صندوق خشبي توجد عليه رقعة شطرنج ، ومناور ، وحامل بإضاءة خلفية ، يرتكز عليه الهاتف. بعد اللعبة ، تتم إزالة كل ما سبق في هذا الصندوق نفسه ويمكن نقله إلى أي مكان دون مشاكل ، على سبيل المثال ، في حقيبة ظهر.مبدأ التشغيل على النحو التالي. في الجزء العلوي من اللوحة ، على شريحة خاصة ، يتم تثبيت الهاتف باستخدام تطبيق خاص ، باستخدام نظام رؤية الكمبيوتر ، يعمل على إصلاح الوضع الحالي للقطع على اللوحة. استنادًا إلى حقيقة أن النظام يراقب جميع التحركات ، ليست هناك حاجة لتحديد الشكل الذي يوجد في الخلية بشكل مرئي ، يكفي معرفة حقيقة وجوده ولونه.بعد إصلاح خطوة قام بها شخص ، يتم إرسال هذه المعلوماتمحرك الشطرنج الذي يقرر التحرك الذي يحتاجه للرد عليه.بعد ذلك ، يتم حساب الزوايا للمواضع التي يجب أن يتخذها الروبوت من أجل التحرك. ثم يتم إرسال هذه المعلومات عبر البلوتوث إلى المعالج. يمكن للمعالج قبول هذهالمعلومات والقيام بخطوة فقط.آمل أن يجد قارئ هذه المقالة شيئًا مثيرًا للاهتمام هنا. ربما يريد شخص ما تكرار هذا المشروع ، أو القيام بشيء مماثل. أريد أن أقول على الفور أنه لن يكون هناك برنامج تعليمي ، لأن نسخ هذا العمل ببساطة وفقًا للتعليمات لن يعمل خطوة بخطوة ، لأن هناك العديد من التفاصيل الدقيقة التي يمكن فهمها فقط عند محاولة تنفيذه. إذا كنت ترغب في إلقاء نظرة على رسومات المناور ، أو إذا كان لديك أي أسئلة أخرى ، اكتب رسالة شخصية على GT أو VK ، فسأجيب مجانًا وعند الطلب.جزء البرنامج
يتم التحكم في كل هذه التركيبة من خلال تطبيق Android صغير واحد. لديه العديد من المهام: تحديد الأرقام على اللوح ، وحساب زوايا المتلاعب ، والعمل مع محرك الشطرنج ، وزوجين من الرسائل الصوتية للروبوت مثل "لقد حددت لك الشيك!" و "شكرا على اللعبة!" ولكن مع كل هذا ، فإن واجهة التطبيق تناسب شاشة واحدة.نظام الرؤية بسيط للغاية. من منظور الهاتف ، لا يوجد فرق كبير ، على سبيل المثال ، بين الملك والحصان - بصريا سيبدو هذان الشكلان مثل الدوائر السوداء والبيضاء. لذلك ، لا يتعرف النظام على الوضع الذي يراه في كل مرة مرة أخرى ، ولكنه يتذكر تسلسل جميع التحركات التي تم إجراؤها. والخطوة التي تم إجراؤها بسيطة للغاية لتحديدها: إذا رأى البرنامج في وقت ما أن قطعة ما قد اختفت في خلية واحدة وظهرت في خلية أخرى ، فسيتم اعتبار ذلك نقلة. هكذا تعمل.يتم تنفيذ هذا النوع من الرؤية التقنية حصريًا من خلال واجهة برمجة تطبيقات Android ، دون استخدام OpenCV أو شيء مماثل. هذا ليس صحيحًا ، والسبب هنا هو مصلحة شخصية في تحقيق كل شيء من الصفر.مناور
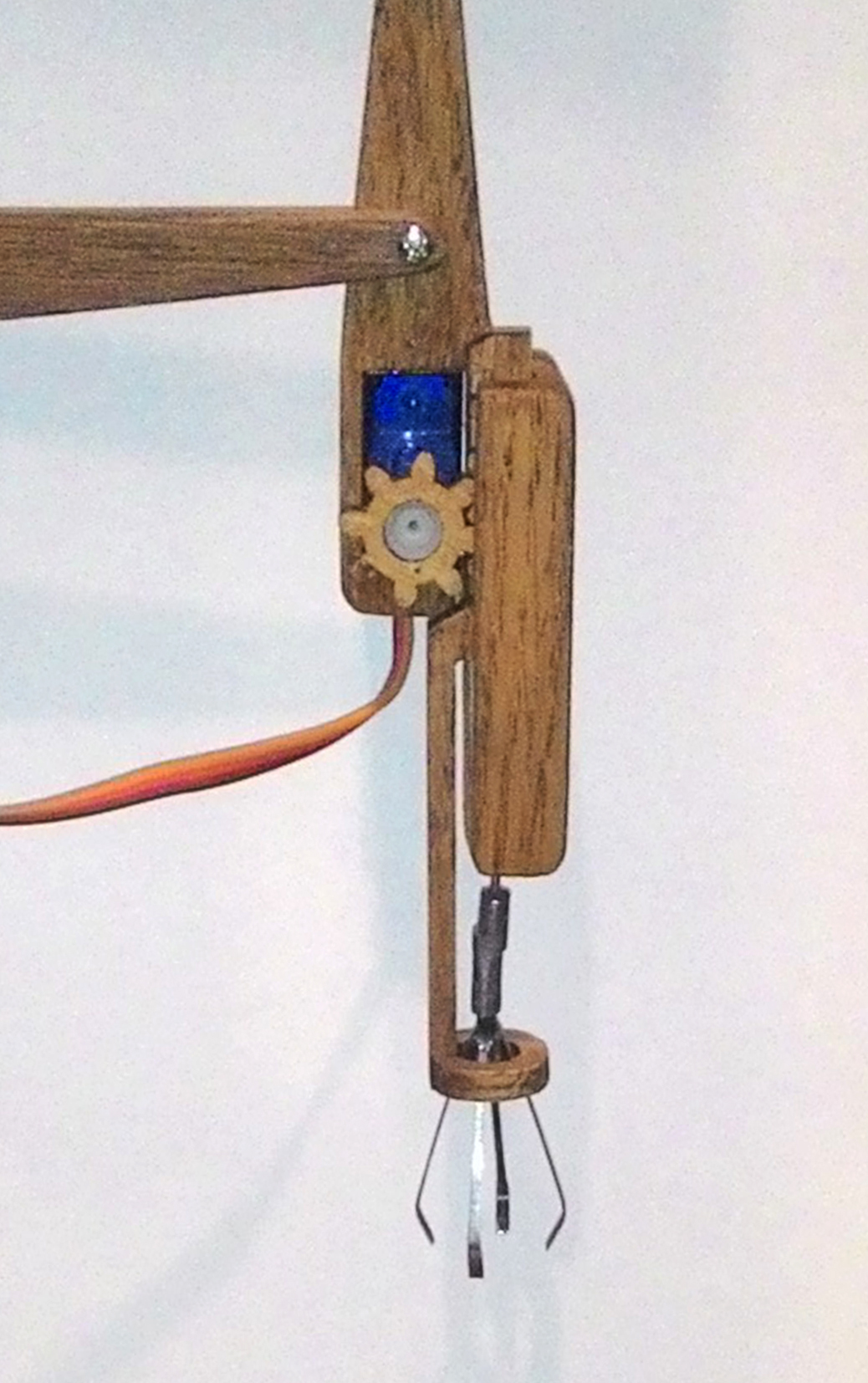
لقد تطلب الأمر الكثير من البحث الإبداعي للتوصل إلى مثل هذا التصميم المناور الذي يمكنه القيام بعمله بشكل ملائم مع محركات أجهزة سيرفو TowerPro sg-90 الصينية الرخيصة التي كان لدي بأعداد كبيرة ، والتي ليست ذات جودة عالية. لذلك ، يتم تصنيع ذراعي المناور في شكل متوازي الأضلاع ، وهذا يسمح لنظام التقاط الشكل أن يبقى دائمًا في وضع رأسي. وهذا بدوره يجعل من الضروري إضافة مؤازرة أخرى ، وبالتالي ، سيكون لدى النظام أخطاء أقل ، ويسمح له بأن يكون خفيفًا وأكثر أو أقلموثوق بها. نظرًا لأن التروس مصنوعة أيضًا من الخشب ، فمن الصعب تحقيق أعلى جودة لعملهم ، وبالتالي ، للتعويض عن رد الفعل العكسي ، يقوم المناور بحركة جانبية قبل كل خطوة من أجل الاقتراب من كل نقطة على جانب واحد.أما بالنسبة لمزود الطاقة ، فإن الروبوت الخاص به يستلمها من لوحتين من الرسوم العادية للهاتف ، والتي توجد بأمان في العلبة. تعمل إحدى الشحنات على تشغيل وحدة التحكم نفسها جنبًا إلى جنب مع وحدة Bluetooth ، والأخرى مباشرة إلى الميكانيكا. من أجل جعل الإضاءة ، تم تفكيك لمبة LED. كما اتضح ، هناك لوحان بداخله: توجد مصابيح LED على أحدهما ، ومحول الطاقة على الآخر. أحدهما متصل بالقوس ، والآخر يوضع في جسم الصندوق. يتم عرض كل الطاقة على مقبس صغير على جانب جسم الصندوق:صورة أخرى تظهر منطقة عمل المناور للنقطة الحمراء المميزة عليها. بالنسبة للمحور الصفري ، يكون نطاق الزاوية 180 درجة.لم أنجح في صنع مثل هذا الروبوت على الفور ، وعملت بعض النماذج الأولية بشكل سيء للغاية ، وبعضها عمل في أعمال أخرى. على سبيل المثال ، يضع الروبوت في الفيديو أدناه السكر في كوب ويقلب النورس.نظام التقاط الأشكال
من المهم بشكل خاص ، في رأيي ، تصميم نظام التقاط الرقم. كان الحل الأكثر وضوحًا هنا هو تحريك خدين تجاه بعضهما البعض تحت سيطرة محرك سيرفو. شيء من هذا القبيل:كما ترون من الشكل ، بالنسبة لمجموعة من القطع الصغيرة تمامًا بقطر قاعدة يبلغ 18 مم ، تحتاج إلى جعل قفص الشطرنج أكبر مرتين تقريبًا ، وتبين أن حجم اللوحة أيضًا ضخم بشكل غير معقول. بعد عدة عمليات تنفيذ غير ناجحة لهذا الخيار ، صادفت مثل هذا الشيء غير المعتاد ، والذي يسمى "قبضة كوليت مرنة") ، ويبدو أن هذا:أي أنه نواة مجوفة مرنة في الداخل مع مخلب صغير محمل بنابض معدني في النهاية ، والذي يغلق إذا تم عصره على الجانبين. وفي غياب الضغط ، يفتح المخلب على الفور. بعد كسر مثل هذا الالتقاط ، قمت على أساس نظامي بالتقاط الأرقام. يضغط المخلب المعدني الحلقة ، التي يتم توصيلها برف التروس ، مدفوعة بمحرك سيرفو.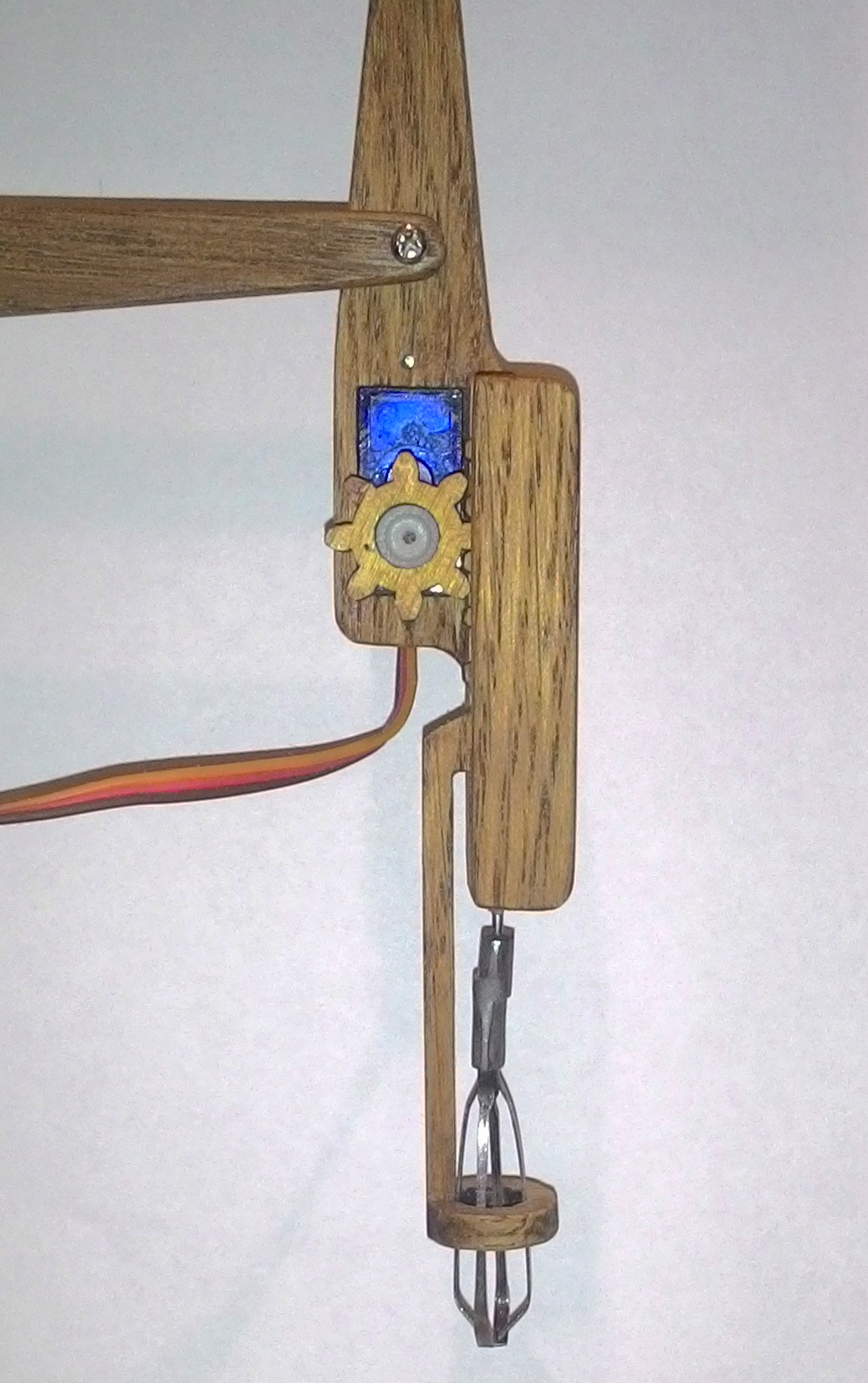
النتائج
يستمر العمل في المشروع ، وتتحسن النتائج تدريجيًا أيضًا. في الوقت الحالي ، يمكن للروبوت أن يلعب لعبة لا يقتصر على عدد التحركات ، لكل من الأسود والأبيض. في هذه الحالة ، لن تكون هناك أخطاء في عمل الميكانيكا ، ولا جزء البرنامج من النظام. بالمناسبة ، لا يلعب بقوة ، على مستوى الفئة الثالثة ، يمكن تصحيح ذلك بسهولة عن طريق استبدال محرك الشطرنج. لقد عرضت هذا الروبوت في معرض "أرخميدس -2016" ، حيث لعب مع أشخاص مختلفين تقريبًا بدون توقف لمدة 6 ساعات متتالية واجتاز مثل هذا الاختبار التجريبي.هذا كل شيء ، آمل أن تكونوا مهتمين بهذا المشروع. بالطبع ، لديها عيوب في ميزات التنفيذ ، لذلك لا يزال هناك مجال للتحسين والتحسين والتطوير. سأكون سعيدًا بأي نصيحة وأسئلة واقتراحات في التعليقات. Source: https://habr.com/ru/post/ar392065/
All Articles