تنفيذ المهام الآلية على منصة KUKA youBot ، الجزء الأول
أعزائي قراء Geektimes ، يرحب بكم مكتب تصميم الطلاب (قسم هندسة الروبوتات أو RED) في قسم نظم المعلومات الإدارية في جامعة ITMO. لقد كتبنا بالفعل في مدونة جامعتنا.في إطار برنامج تطوير الجامعة ، تسعى RED لعدة أهداف ، وأحدها المشاركة في الروبوتات التنافسية للطلاب على المستوى الدولي. كمنصة إطلاق ، تم اختيار مسابقات RoboCup الدولية الشهيرة . هناك عدة أنواع من المسابقات في RoboCup ، من كرة القدم الروبوتية إلى مسابقات الروبوتات الموجهة اجتماعيًا ، والتي تقام في دول مختلفة منذ عام 1997. كما شاركت الفرق الروسية في المسابقات وفازت بجوائز.استنادًا إلى المعدات التقنية لـ RED وتحليل البيئة التنافسية ، كانت RoboCup @ Work واحدة من الفئات المحتملة للمسابقات ، حيث يتنافس العديد من المتلاعبين الصناعيين في أداء مهامهم النموذجية. يرجع هذا الاختيار إلى حد كبير إلى حقيقة أن القسم لديه اثنين من الروبوتات الصناعية التي أنشأتها KUKA. youBot عبارة عن منصة متنقلة شاملة الاتجاهات يتم تثبيت معالج بها خمس درجات من الحرية ، مع قبضة بإصبعين. تتضمن الحزمة: ليزر Rangefinder URG-04LX-UG01 من Hokuyo Automatic Co. مع نطاق قياس 5600 مم عند 240 درجة ، والذي يمكنك من خلاله تنفيذ التعريب ورسم الخرائط ؛ جهاز ASUS Xtion للتعرف على الحركة ، على غرار Microsoft Kinect. يقدم المبدعون الروبوت المناسب تمامًا لمجال التعليم. يمكنك تثبيت نظام تشغيل على متن وحدة تحكم youBot (في حالتنا ، Ubuntu 12.04) ، والتي تتيح لك بدء التحكم فورًا على جهاز كمبيوتر مدمج في الروبوت. يتم التواصل مع الروبوت عبر وحدة Wi-Fi.العمل مع youBot فرصة رائعة حقًا للتعرف على المتلاعبين الصناعيين. ولكن أولاً ، نحن بحاجة إلى اختبار أنفسنا وأنتم في العمل.تقرر تنفيذ مهمة واضحة لك على هذا النوع من المتلاعبين المتحركين - للعثور على الكائن الهدف والتقاطه. خوارزمية البرنامج هي كما يلي:
يمكنك تثبيت نظام تشغيل على متن وحدة تحكم youBot (في حالتنا ، Ubuntu 12.04) ، والتي تتيح لك بدء التحكم فورًا على جهاز كمبيوتر مدمج في الروبوت. يتم التواصل مع الروبوت عبر وحدة Wi-Fi.العمل مع youBot فرصة رائعة حقًا للتعرف على المتلاعبين الصناعيين. ولكن أولاً ، نحن بحاجة إلى اختبار أنفسنا وأنتم في العمل.تقرر تنفيذ مهمة واضحة لك على هذا النوع من المتلاعبين المتحركين - للعثور على الكائن الهدف والتقاطه. خوارزمية البرنامج هي كما يلي:- التعريب ورسم الخرائط: تحديد موقع الموقع المستهدف الذي يقف عليه الكائن ، من بين العقبات (حيث أن العوائق هي ألواح منخفضة - "جدران") مع النهج اللاحق للموقع.
- : , , .
- .
يتم حل مشكلة التوطين باستخدام معين المدى بالليزر أعلاه ، ويتم حل مهمة التعرف باستخدام ASUS Xtion. كل ما نحتاجه هو كتابة البرامج التي تعالج البيانات من هذه المستشعرات (الفائدة هي وجود مكتبات مفتوحة جاهزة لهذه الأغراض) ، بالإضافة إلى تنفيذ التقاط الكائنات بطريقة ما. بالإضافة إلى ذلك ، تحتاج إلى دمج الأجزاء الثلاثة من المهمة في نظام واحد.قررنا التحكم فيك ، ومعالجة البيانات والتواصل بين أجهزة الاستشعار والروبوت باستخدام نظام تشغيل الروبوت. كانت هناك بالفعل مقالات عن هبر عن ROS وعن الروبوتات التي تعمل بمساعدتها. على سبيل المثال، هنا يقال عن الرائع الروبوت إدراك hexapod، من تحليل الحديد وتصميم نموذج لتوحيد كافة العقد تحت سيطرة ROS.في هذه الحالة فقط ، نتذكر أن ROS هي إطار للعمل مع الروبوتات التي تسهل تطوير وتكامل مكونات البرامج المختلفة. يستخدم ROS في كل من الهواة والمشاريع التعليمية ، ولتطوير برامج الروبوت الصناعية. تجدر الإشارة إلى أن الإصدار الثاني من ROS قيد التطوير حاليًا ، والذي يعد بإدراج المزيد من الميزات لتطوير الروبوتات.توفر ROS العديد من خدمات نظام التشغيل القياسي: تجريد الأجهزة ، والتحكم في الجهاز منخفض المستوى ، وتمرير الرسائل بين العمليات ، وإدارة الحزم. يتكون ROS من جزأين: جوهر برنامج ros نفسه ، و ros-pkg ، مجموعة من الحزم ( الحزمة) ، التي تحتوي بداخلها على أي بيانات ، ومكتبات ، وقابلة للتنفيذ والتكوين ، مدمجة منطقياً في وحدة نمطية مفيدة.المفاهيم الأساسية لمكونات الاتصالات في ROS هي العقد ( عقدة )، رسالة ( رسالة ) والموضوعات ( الموضوع) العقدة هي عملية جارية يمكنها التواصل مع العمليات الأخرى. الموضوع - الأنبوب المسمى الذي يربط العقد المختلفة. يعتمد ROS على بنية الرسم البياني ، حيث تتم معالجة البيانات في العقد التي يمكنها استقبال الرسائل ونقلها فيما بينها. يتم نشر هذه الرسائل في مواضيع تقسم الرسائل إلى مجموعات اهتمامات. عندما تحتاج عقدة معينة إلى تلقي رسائل ببيانات معينة ، تشترك هذه العقدة في موضوع معين. ونتيجة لهذا هناك علاقة بين العقد "المشترك، الناشر» ( الناشر للمشترك ).في حالتنا ، تعمل نواة ROS على وحدة تحكم youBot نفسها ، وهناك رسم بياني لمعالجة البيانات منظم بين ثلاث عقد برنامج (التعريب والتعرف على الكائنات والتقاط). تنشر هذه العقد بيانات عن عملها في الموضوعات المناسبة ، سواء كانت معلومات حول وصول الروبوت إلى النظام الأساسي المستهدف أو إحداثيات الكائن. بالنسبة لثلاثة مواضيع ، يتم توقيع عقدة التحكم الرئيسية ، التي تراقب عمل الثلاثة الأخرى ، وتنشر الأوامر في موضوع خاص ، حيث يتم الاشتراك في العقد المُدارة. لذلك ، يبدو الرسم البياني للتحكم كما يلي: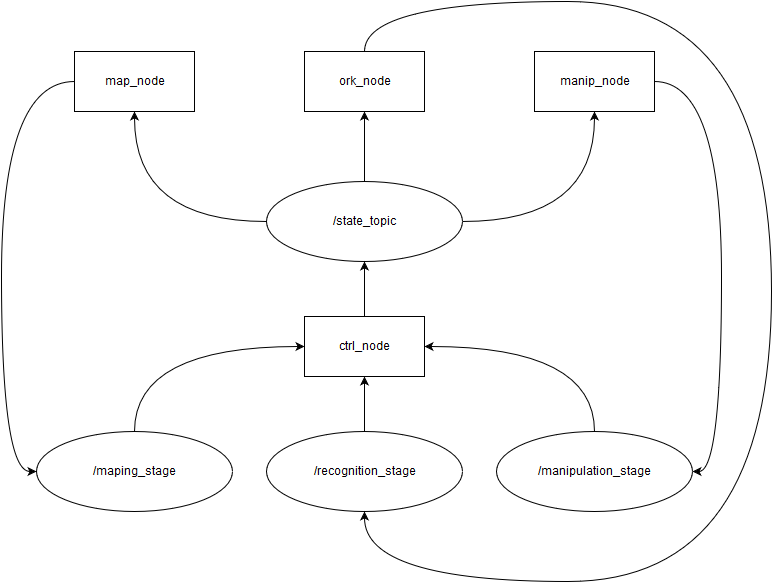 لتسريع العمل ، قمنا بتقسيمه إلى ثلاثة فرق ، كان على كل منها تنفيذ إحدى العقد الثلاث.في المقالة التالية ، سنخبرنا كيف تمكنا من تنفيذ التوطين ، وماذا استخدمنا في ذلك.ابق معنا.
لتسريع العمل ، قمنا بتقسيمه إلى ثلاثة فرق ، كان على كل منها تنفيذ إحدى العقد الثلاث.في المقالة التالية ، سنخبرنا كيف تمكنا من تنفيذ التوطين ، وماذا استخدمنا في ذلك.ابق معنا. Source: https://habr.com/ru/post/ar392419/
All Articles